手术系统的制作方法
1.本发明涉及使用把持机器人的手术系统,把持机器人保持内窥镜等处置器具。
背景技术:
2.在使用腹腔镜等内窥镜的手术中,在患者的腹部设置多个孔,并从该孔插入内窥镜、钳子等,手术操作者一边观察由内窥镜拍摄到的图像一边操作钳子等手术器具。作为使用保持该内窥镜的把持机器人的手术系统,专利文献1公开了如下外科治疗装置:外科医生能够在器具不离手的情况下,在患者体内准确地决定内窥镜照相机以及其它外科器具的位置。
3.该外科治疗装置包括:机器人机械手,其能够控制的自由度最少也有一个;控制单元,其控制机器人机械手的动作;装置的保持单元,其用于将第一外科用装置安装于机械手;以及外科医生用输入单元,其安装在外科用装置上,用于外科医生能够对控制单元指定向第一外科用装置要求的动作。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第2575586号公报。
技术实现要素:
7.发明所要解决的问题
8.这样,通过使用保持内窥镜的把持机器人的手术系统,能够根据手术信息准确地控制内窥镜的位置,而且基于对手术操作者进行支持、减轻患者负担的观点,手术系统的作用也越来越重要。另一方面,能够通过使用把持机器人来准确地控制内窥镜的位置,但并不限于被控制在对于手术操作者而言优选的位置。
9.本发明的目的在于提供手术系统,能够基于手术相关的多方面的信息来最适宜地控制处置器具的初始位置。
10.用于解决问题的方案
11.为了解决上述问题,本发明的一方面的手术系统具备:把持机器人,其保持处置器具;以及初始设定部,其设定把持机器人的包括初始位置的初始状态,所述手术系统的特征在于,初始设定部具备:存储部,其存储与如下关系相关的关联性信息,该关系为手术相关的条件信息与把持机器人的初始位置的关系;位置确定部,其基于所输入的条件信息以及从存储部输入的关联性信息,来设定把持机器人的初始位置;以及驱动控制部,其基于从位置确定部输入的信号,生成用于使把持机器人的位置向既定的位置移动的控制信号,并将该控制信号向把持机器人输出。
12.根据这样的结构,能够基于涉及手术相关的条件信息与把持机器人的初始位置的关系的关联性信息,设定把持机器人的初始状态,因此能够基于手术相关的信息,将把持机器人保持的处置器具配设于最适宜的初始位置。
13.在上述手术系统中,优选为,位置确定部基于手术操作者前一次进行的手术来生成新的关联性信息,并将该新的关联性信息与手术操作者相对应地保存于存储部。由此,能够基于手术操作者前一次进行的手术的把持机器人的初始状态的信息来设定下一次手术的把持机器人的初始状态。
14.在上述手术系统中,也可以是,条件信息包括从由手术操作者信息、手术方式信息、患者信息、对象脏器信息、处置器具产品信息以及适配器信息形成的组中选择的一种以上信息,适配器连接于把持机器人并且直接保持处置器具。由此,能够基于手术相关的各种观点的信息来设定把持机器人的初始状态。
15.在上述手术系统中,也可以是,手术方式信息包括与套管针的接口位置相关的信息。由此,能够设定把持机器人的初始状态,使得处置器具与在手术中使用的套管针的接口位置对应地进行位置对准。
16.在上述手术系统中,也可以是,患者信息包括体形、年龄、性别。由此,能够基于根据患者的体形、年龄、性别而确定的信息来设定把持机器人的初始状态。
17.在上述手术系统中,也可以是,处置器具产品信息包括与处置器具的形状相关的信息。由此,能够基于与处置器具的形状相关的信息来设定把持机器人的初始状态。
18.在上述手术系统中,也可以是,条件信息包括从输入装置输入的信息、电子病例信息以及预先存储于存储部的信息中的至少一者。由此,能够基于各种条件信息来设定把持机器人的初始状态。
19.在上述手术系统中,也可以是,存储部将条件信息与手术室中的其它设定的关系也保存为关联性信息,初始设定部具有条件设定部,所述条件设定部基于所输入的条件信息以及从存储部输入的关联性信息,来确定手术室中的其它设定条件。由此,除了对把持机器人的初始状态进行设定以外,还能够基于手术相关的条件信息来设定手术室中的其它设定条件。
20.发明的效果
21.根据本发明,能够提供如下手术系统,该手术系统能够基于手术相关的多方面的信息来最适宜地控制处置器具的初始位置。
附图说明
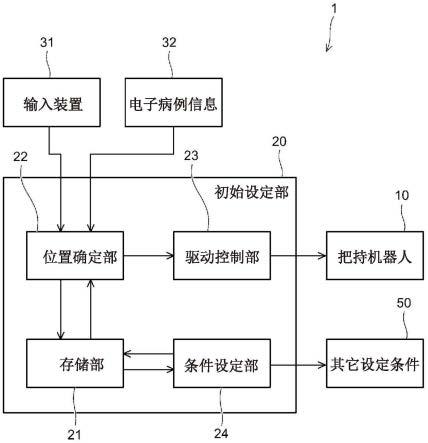
22.图1是例示本实施方式涉及的手术系统的结构的框图。
23.图2是例示作为处置器具的一例的内窥镜的示意图。
24.图3是示出把持机器人的例子的示意图。
25.图4是示出本实施方式涉及的手术系统的使用例的示意图。
26.图5是说明使用内窥镜进行手术的患部的图。
27.图6是说明对肺进行手术时的内窥镜的插入方向的图。
28.图7是说明对肝脏进行手术时的内窥镜的插入方向的图。
29.图8的(a)是说明在通过经腹膜途径(transperitoneal approach)对肾脏进行手术时的内窥镜的插入方向的图,图8的(b)是说明在通过腹膜后途径(retrope ritoneal approach)对肾脏进行手术时的内窥镜的插入方向的图。
具体实施方式
30.以下,基于附图说明本发明的实施方式。而且,在以下的说明中,对于同一的构件标注同一的附图标记,对于说明了一遍的构件适当省略说明。
31.(手术系统的整体结构)
32.图1是例示本实施方式涉及的手术系统的结构的框图。
33.图2是例示作为处置器具的一例的内窥镜的示意图。
34.图3是示出把持机器人的例子的示意图。
35.本实施方式涉及的手术系统1具备:把持机器人10,其保持处置器具;以及初始设定部20,其设定把持机器人10的包括初始位置的初始状态。而且,在本实施方式中,将使用内窥镜100作为处置器具的情况作为例子进行说明。
36.如图2所示,内窥镜100具有在头部110安装有既定的镜筒150的结构。镜筒150装卸自如地安装于头部110,能够更换为适于手术的镜筒150来使用。在头部110设置有操作部120。通过操作该操作部120,能够进行内窥镜100的操作。例如,由操作部120进行内窥镜100的拍摄中的变焦的调整、拍摄范围的调整。在镜筒150的前端弯折的类型中,能够通过操作部120的操作来使镜筒150的前端向想要拍摄的方向弯曲。在腹腔镜手术等中使用内窥镜100的情况下,向患者的腹部插入内窥镜100的镜筒150并获取腹部的影像,并且显示于监视器。手术操作者一边观察显示于监视器的患部的影像一边操作钳子等来进行手术。
37.如图3所示,由把持机器人10保持内窥镜100,并准确地控制内窥镜100的位置。把持机器人10具有:臂15;以及适配器11,其设置于臂15的前端,用于保持内窥镜100。通过驱动把持机器人10的臂15,控制内窥镜100的位置。臂15形成为多关节型,能够通过臂15的运动来自如地设定内窥镜100的位置、角度。
38.(手术系统的初始设定部)
39.如图1所示,手术系统1的初始设定部20具备存储部21、位置确定部22以及驱动控制部23。存储部21存储与如下关系相关的关联性信息,该关系为手术相关的条件信息与把持机器人10的初始位置的关系。
40.这里,把持机器人10的初始位置与当要进行手术时由把持机器人10保持的内窥镜100的初始位置(在手术开始阶段配设的位置)关联。即,通过在把持机器人10的臂15保持内窥镜100,决定把持机器人10与内窥镜100的位置关系。由此,基于把持机器人10的初始位置来决定内窥镜100的前端的初始位置。
41.手术相关的条件信息包括从由手术操作者信息、手术方式信息、患者信息、对象脏器信息、处置器具产品信息以及适配器信息形成的组中选择的一种以上信息,所述适配器连接于把持机器人10并直接保持处置器具(例如内窥镜100)。
42.手术操作者信息包括手术操作者的身高、优势手、视力、色觉、手术中的位置(站立位置、是否坐椅子)等手术操作者的各种信息。手术方式信息包括与手术的内容相应的处置器具的种类、处置器具的配置、与套管针的接口位置相关的信息。患者信息包括患者的体形(身高、体重)、年龄、性别的信息。对象脏器信息包括作为手术对象的脏器的名称、脏器与主要血管的位置关系等信息。处置器具产品信息包括与处置器具的形状相关的信息。适配器信息包括与在保持处置器具的把持机器人10设置的适配器11的处置器具安装基准位置相关的信息。
43.这些条件信息可以从键盘、扫描仪等输入装置31输入,也可以从电子病历信息32的信息来获取。另外,条件信息也可以是预先存储于存储部21的信息。
44.位置确定部22基于所输入的条件信息、从存储部21输入的关联性信息来设定把持机器人10的初始状态。把持机器人10的初始状态包括把持机器人10的初始位置。作为除了初始位置以外的初始状态,例举在决定把持机器人10的初始位置时的臂15、适配器11的角度。在后详细说明位置确定部22。
45.驱动控制部23基于从位置确定部22输入的信号,生成用于使把持机器人10的位置向既定的位置移动的控制信号,并将该控制信号向把持机器人10输出。
46.在具备这样的结构的手术系统1中,基于涉及手术相关的条件信息与把持机器人10的初始位置的关系的关联性信息,设定把持机器人10的初始位置。例如,根据手术方式信息、脏器信息以及手术操作者的信息,由位置确定部22确定从患者的体表面的哪个位置向哪个方向插入内窥镜100,并且驱动控制部23控制把持机器人10,使得将内窥镜100配设于由位置确定部22确定的位置。由此,能够将由把持机器人10保持的内窥镜100配设于最适宜的初始位置。
47.以往,在由把持机器人10保持内窥镜100并控制位置的情况下,不决定内窥镜100的初始位置,或者将内窥镜100配设于固定的初始位置并从该位置进行位置控制。在本实施方式涉及的手术系统1中,利用手术相关的条件信息,由位置确定部22确定内窥镜100的最适宜的初始位置,并且控制把持机器人10使得内窥镜100配设于该位置。由此,例如能够与手术方式、患者的体形、手术操作者的喜好相适应地设定内窥镜100的初始位置。
48.另外,即使是相同的手术,有时也最好是根据手术操作者的身高、优势手、站立位置等来改变把持机器人10的臂15的位置。考虑这样的信息,在手术操作者容易实施手术的位置配置把持机器人10,从而能够设定内窥镜100的初始位置。
49.(位置确定部)
50.位置确定部22用于确定内窥镜100的初始位置,基于所输入的条件信息、从存储部21输入的关联性信息来设定把持机器人10的初始状态。在把持机器人10被固定于手术用床的情况下,将手术用床或者把持机器人10的确定位置作为基准来进行把持机器人10的位置控制。另一方面,在把持机器人10未被固定于手术用床的情况下,在决定了手术用床与把持机器人10的相对的位置关系时,设定把持机器人10的位置控制的原点。而且,在把持机器人10以及手术用床分别具有绝对的位置信息的情况下,根据绝对的位置基准来进行把持机器人10的位置控制。位置确定部22根据上述的任一个位置基准来确定把持机器人10的初始状态。
51.位置确定部22根据由输入装置31输入的条件信息、从电子病历信息32读入的条件信息来确定把持机器人10的初始状态。通过确定把持机器人10的初始状态,能够确定由把持机器人10保持的内窥镜100的初始位置。
52.另外,位置确定部22也可以根据内窥镜100的产品信息(形状、类型等)、把持机器人10把持内窥镜100的适配器的信息,来决定把持机器人10的前端与内窥镜100的前端的位置关系,并确定内窥镜100的初始位置。还有,根据患者信息,基于患者与把持机器人10的原点的关系来决定内窥镜100的插入位置。
53.位置确定部22也可以使用与手术方式信息中包括的套管针的接口位置相关的信
息,来确定内窥镜100的初始位置。即,也可以根据手术方式设定套管针的接口位置,以使内窥镜的前端朝向根据作为基准的套管针的接口位置和患者信息(患者的体形)而计算出的接口位置的方式,确定内窥镜100的初始位置。
54.另外,位置确定部22也可以基于手术操作者前一次进行的手术来生成新的关联性信息,并将该新的关联性信息与手术操作者相对应地保存于存储部21。例如,即使内窥镜100配设于由位置确定部22确定的初始位置,手术操作者有时会原样保持该位置来开始插入内窥镜100,有时也会稍微修正位置后插入内窥镜100。在修正了位置的情况下,位置确定部22将修正后的位置与本次的条件信息相关联来作为新的关联性信息,并存储于存储部21。由此,能够基于手术操作者前一次进行的手术中的把持机器人10的初始位置的信息来设定下一次手术中的把持机器人10的初始位置。这样获得的关联性信息能够作为用于对条件信息与位置信息的关系进行机器学习的教师数据来利用。
55.在腹腔镜手术中,向患者的腹部送入气体并使腹部膨胀来进行手术。因此,应插入内窥镜100的位置(套管针的位置)成为与当初的预定不同的位置、朝向的情形也多。因而,在将内窥镜100配设于由位置确定部22确定的初始位置之后,由手术操作者将内窥镜100引导至准确的位置。通过将此时初始位置与实际位置的偏差的数据进行蓄积,位置确定部22能够提高在下一次手术中确定内窥镜100的初始位置时的精度。
56.位置确定部22也可以通过分析由内窥镜100获取到的影像,来求出内窥镜100的初始位置与实际的插入位置的偏差。例如,在将内窥镜100配设于初始位置之后,由内窥镜100获取影像。根据该影像,通过图像识别求出套管针的位置,并运算内窥镜100与套管针的位置的偏差。为了对通过该运算而得到的偏差进行校正,也可以从位置确定部22向驱动控制部23送出驱动信号来驱动把持机器人10,从而使内窥镜100的位置与实际的套管针的位置对准。
57.存储部21也可以将条件信息与手术室中的其它设定的关系也保存为关联性信息,初始设定部20也可以具有条件设定部24,所述条件设定部24基于所输入的条件信息以及从存储部21输入的关联性信息来确定手术室中的其它设定条件。由此,除了与手术室相关的信息之外,还能够基于手术室中的其它设定条件来设定把持机器人10的初始位置。
58.在本实施方式涉及的手术系统1中,初始设定部20也可以具备条件设定部24。条件设定部24基于所输入的条件信息以及从存储部21输入的关联性信息来确定手术室中的其它设定条件50(参照图1)。这里,作为手术室中的其它设定条件的具体例,能够举出手术室的温度、湿度、照明的状态等。存储部21将条件信息与手术室中的其它设定的关系也保存为关联性信息,由条件设定部24基于保存于该存储部21的关联性信息以及所输入的条件信息来确定手术室中的其它设定条件。由此,除了确定把持机器人10的初始状态之外,还能够基于手术相关的条件信息来设定手术室中的其它设定条件,能够实现手术环境的最优化。作为手术室中的其它设定条件的其它具体例,能够举出处置器具的设定。更具体来讲,在处置器具为内窥镜100的情况下,例示内窥镜100的光学设定(照明、焦点位置等)、操作上的设定(加热器温度等)。
59.(使用例)
60.图4是示出本实施方式涉及的手术系统的使用例的示意图。
61.在图4示出了进行腹腔镜手术时的手术系统1的使用例。在腹腔镜手术中,在患者
的腹部打开多个部位的小孔并插入套管针60,并且向套管针60插入内窥镜100、钳子70来实施手术。在图4所示的例子中,内窥镜100被把持机器人10的臂15保持,内窥镜100的镜筒150从套管针60插入患者的体内。手术操作者操作的钳子70从其它套管针60插入。
62.在开始进行腹腔镜手术时,由初始设定部20的位置确定部22确定把持机器人10的初始状态,由驱动控制部23进行控制使得把持机器人10成为初始状态。通过控制把持机器人10的初始状态,将由把持机器人10保持的内窥镜100配设于初始位置。
63.例如,如图3所示,在把持机器人10的适配器安装内窥镜100之后,对把持机器人10的臂15进行驱动,如从图中箭头符号a到箭头符号b所示那样,改变内窥镜100的位置以及朝向。位置确定部22在基于某条件信息而确定的内窥镜100的初始位置为图中所示的位置p1的情况下,确定把持机器人10的初始状态使得内窥镜100位于位置p1。通过将把持机器人10的臂15驱动成为所确定的初始状态,将内窥镜100配设于位置p1。
64.另一方面,有时也会根据条件信息而确定与位置p1不同的初始位置。在确定了图中所示的位置p2的情况下,控制把持机器人10来使内窥镜100的初始位置与位置p2对准。这样,根据条件信息来确定基于内窥镜100的最适宜的初始位置的、把持机器人10的初始状态,通过将把持机器人10控制成为该初始状态,将内窥镜100配设于最适宜的初始位置。
65.手术操作者一边用监视器参照内窥镜100拍摄到的手术部的影像,一边操纵钳子70来进行手术。也可以在进行手术的过程中,由把持机器人10控制内窥镜100的位置。
66.图5是说明要使用内窥镜来进行手术的患部的图。图6是说明要对肺进行手术时的内窥镜的插入方向的图。图7是说明要对肝脏进行手术时的内窥镜的插入方向的图。图8中的(a)是说明在通过经腹膜途径对肾脏进行手术时的内窥镜的插入方向的图。图8中的(b)是说明在通过腹膜后途径对肾脏进行手术时的内窥镜的插入方向的图。
67.通过使用内窥镜100,能够将身体的各部位作为对象来进行手术。应用范围大致区分为胸腔镜下手术和腹腔镜下手术。如图5所示,胸腔镜下手术的具体例为如下:
68.(1)肺切除术、肺叶切除术、全肺切除术;
69.(2)胸膜(自发性气胸)切除术;
70.(3)纵隔肿瘤切除术;
71.(4)心脏搭桥术;
72.(5)食道肿瘤切除手术;
73.腹腔镜下手术的具体例为如下:
74.(6)食管裂孔疝手术;
75.(7)胃部分切除术、胃次全切除术、全胃切除术;
76.(8)胃十二指肠溃疡穿孔缝合术;
77.(9)胆囊切除术;
78.(10肝囊肿开窗术;
79.(11)脾切除术;
80.(12)肠粘连松解术;
81.(13)小肠切除术;
82.(14)阑尾切除术;
83.(15)结肠切除术;
84.(16)腹股沟疝修补术;
85.(17)肾上腺切除术;
86.(18)肾切除手术;
87.(19)直肠切除术;
88.(20)子宫肌瘤核除术、卵巣部分切除术。
89.这样,能够在多种手术方式中应用内窥镜100,但是根据各自的手术方式,内窥镜100所插入的地方不同,插入方向也不同。例如,在切除肺的手术方式的情况下,如图6所示,内窥镜100从前腋窝部b1插入。在切除肝癌的情况下,如图7所示,内窥镜100的镜筒150从肚脐b21插入。在图7中,在肚脐b21与肝脏b22之间插入有三个钳子70。
90.即使患部相同,当手术方式不同时也会有插入的地方不同的情况。例如,在通过经腹膜途径对肾脏进行手术时,如图8的(a)所示,内窥镜100的镜筒150从侧腹部的腹侧b31朝向肾脏插入,右侧的钳子70从侧腹部的中央b32插入,左侧的钳子70从下肋部b33插入。在通过腹膜后途径对肾脏进行手术时,如图8的(b)所示,内窥镜100的镜筒150从侧腹部的中央b41朝向肾脏插入,右侧的钳子70从腰三角的脊柱部附近b42插入,左侧的钳子70从下肋部b43插入。
91.本实施方式涉及的手术系统1在从输入装置31输入与患部、手术方式相关的信息时,根据所输入的信息来设定内窥镜100的前端的初始位置,并使把持机器人10适当地进行移动和动作,来调整内窥镜100的位置以及插入方向。因此,手术操作者能够迅速且可靠地向患者插入内窥镜100。
92.然后,作为使用本实施方式涉及的手术系统1的手术的具体的一例,对于腹股沟疝手术中的应用进行说明。
93.如果是腹股沟疝(手术方式信息),则通常从肚脐(手术方式信息)朝向腹股沟部(脏器信息)插入内窥镜100。在作为手术操作者的a医生喜欢向比腹股沟部靠外侧插入内窥镜100后向内侧移动视野(手术操作者信息)的情况下,内窥镜100的初始位置被设定为,从肚脐朝向比腹股沟部靠外侧的位置。
94.基于内窥镜产品信息以及适配器信息(例如,内窥镜100的镜筒150(硬性镜)的前端位于比把持机器人10的前端的适配器11靠前方约30cm)来使把持机器人10移动,使得硬性镜的前端位于与肚脐分离10cm的位置并且如果保持原样直进则会到达腹股沟部的外侧。这里,能够基于患者信息,大概计算出患者的肚脐位置相对于在手术用床设置的原点而处于怎样的位置。如果用传感器等测量手术用床与把持机器人10的相对位置,则能够求出把持机器人10应该移动的位置。
95.通过使用本实施方式涉及的手术系统1,能够根据腹股沟疝(手术方式信息)中的腹股沟部(脏器信息)的信息、作为手术操作者的a医生的喜好(手术操作者信息)、内窥镜100与把持机器人10的位置关系(处置器具产品信息以及适配器信息)、患者信息等来确定把持机器人10的初始状态,能够将内窥镜100自动地配设于在a医生进行腹股沟疝手术时适合的初始位置。
96.如以上说明,根据实施方式,能够提供如下手术系统1,该手术系统1能够基于手术相关的多方面的信息来最适宜地控制处置器具的初始位置。
97.而且,上面说明了本实施方式以及其具体例,但是本发明并不限于这些例子。例
如,作为处置器具而示出了内窥镜100的例子,但是即使是钳子70、清洗装置、吸引装置、超声刀等除了内窥镜100以外的处置器具也能够应用。另外,本领域技术人员对上述的各实施方式或者其具体例适当进行结构要素的追加、删除、设计变更而得到的方案、适当组合各实施方式的特征的方案,只要具备本发明的宗旨,也包含于本发明的范围。
98.附图标记说明
99.1:手术系统;10:把持机器人;11:适配器;15:臂;20:初始设定部;21:存储部;22:位置确定部;23:驱动控制部;24:条件设定部;31:输入装置;32:电子病历信息;50:其它设定条件;60:套管针;70:钳子;100:内窥镜;110:头部;120:操作部;150:镜筒;p1:位置;p2:位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1