手术支援装置的制作方法
1.本发明涉及一种具备保持内窥镜的功能的手术支援装置的技术领域。
背景技术:
2.例如,已知一种玻璃体手术,其通过抽吸去除眼球内部的玻璃体而使视网膜恢复正常的状态,以治疗黄斑病变或视网膜脱落等。
3.在通常的玻璃体手术中,施术者(医生)会利用手术显微镜等通过被施术者(患者)的瞳孔观察眼球内部,但通过瞳孔能够观察的眼球内部的范围有限,为了使无法观察的部分进入可视范围,需要从外侧压迫眼球。这种压迫有可能会导致手术中的疼痛或手术后的炎症。
4.因此,提出了如专利文献1所示的将内窥镜用于玻璃体手术中的方法。
5.通过将内窥镜插入到被施术者的眼球内部,眼球内部的图像会显示于显示器等显示装置上。施术者通过使内窥镜在眼球内部移动,能够轻易地观察通常无法从瞳孔视觉辨认的部分。
6.在使用这种内窥镜的玻璃体手术中,无需在观察眼球内部时压迫眼球,因此能够减轻对被施术者的眼球的负担。
7.以往技术文献
8.专利文献
9.专利文献1:日本特开2005-304633号公报
技术实现要素:
10.发明要解决的技术课题
11.在玻璃体手术中,通过将玻璃体切割器或镊子、灌流液等的注入器等医疗工具插入到眼球中来进行手术。施术者一边在显示器上确认基于内窥镜的拍摄的内窥镜拍摄图像,一边进行眼球内部的手术。
12.在使用这种内窥镜的手术中,施术者推测内窥镜相对于被施术者的眼球的插入状态,掌握显示于显示器上的内窥镜拍摄图像映现出的是眼球内部的哪个位置并非易事。
13.因此,本发明的目的在于,进行能够在空间上掌握内窥镜相对于被施术者的插入状态的显示。
14.用于解决技术课题的手段
15.本发明所涉及的手术支援装置具备:臂部,具有用于保持内窥镜的保持器,并且在通过所述保持器保持所述内窥镜的状态下调节所述内窥镜的位置;图像生成部,生成被所述保持器保持的所述内窥镜的视点下的被施术者的三维模型的图像即内窥镜视点映射图像;显示控制部,进行所述内窥镜视点映射图像和由所述内窥镜拍摄到的内窥镜拍摄图像的显示控制;及操作部,用于使所述内窥镜拍摄图像旋转,所述手术支援装置根据所述操作部的操作在不使所述内窥镜发生位移的情况下使显示的所述内窥镜拍摄图像旋转,并且使
所述内窥镜视点映射图像与该旋转联动地旋转。
16.由此,显示表示对应于旋转后的内窥镜拍摄图像的状态的内窥镜与被施术者之间的位置关系的内窥镜视点映射图像。
17.在上述手术支援装置中,所述内窥镜视点映射图像的旋转可考虑在固定表示所述内窥镜的图像的位置的状态下进行。
18.由此,与内窥镜拍摄图像的旋转状态无关地,内窥镜视点映射图像总会在映现有表示内窥镜的图像的状态下显示。
19.在上述手术支援装置中,所述显示控制部可考虑在同一画面内显示所述内窥镜视点映射图像和所述内窥镜拍摄图像。
20.由此,在一边视觉辨认内窥镜拍摄图像一边进行手术时,能够在不将视线转移到其他显示器的情况下确认内窥镜视点映射图像。
21.在上述手术支援装置中,显示控制部可考虑在同一画面内显示在三维眼球模型上表示所述内窥镜的位置的眼球映射图像和所述内窥镜视点映射图像。
22.由此,在视觉辨认内窥镜视点映射图像时,能够在不将视线转移到其他显示器的情况下确认眼球映射图像。
23.发明效果
24.根据本发明,能够在空间上掌握内窥镜相对于被施术者的插入状态。
附图说明
25.图1是示意地表示本发明的实施方式中的手术系统所具有的结构的一例的图。
26.图2是示意地表示本实施方式中的被施术者的眼球的截面结构的图。
27.图3是示意地表示本实施方式中的手术支援装置所具有的结构的一例的图。
28.图4是示意地表示本实施方式中的内窥镜保持装置的臂前端部所具有的结构的一例的图。
29.图5是表示本实施方式中的显示于显示器上的显示图像的一例的图。
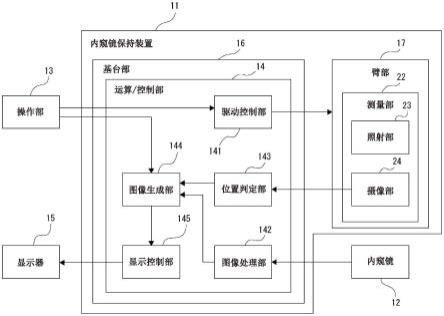
30.图6是表示本实施方式中的手术支援装置的结构的一例的框图。
31.图7是表示本实施方式中的手术支援装置的运算/控制部所执行的处理例的流程图。
32.图8是表示本实施方式中的用于判定眼球与内窥镜之间的位置关系的步骤的概要的图。
33.图9是表示本实施方式中的手术支援装置的运算/控制部所执行的处理例的流程图。
34.图10是表示本实施方式中的运算/控制部所执行的内窥镜视点映射图像生成处理的一例的流程图。
35.图11是表示本实施方式中的显示于显示器上的显示图像中的内窥镜拍摄图像及内窥镜视点映射图像的一例的图。
具体实施方式
36.参考图1至图11对本发明的实施方式进行说明。附图中提取示出了被认为是进行
说明时必要的主要部件及其周边的结构。并且,附图是示意性的,附图中记载的各结构的尺寸、比率等仅为一例。因此,只要在不脱离本发明的技术思想的范围内,便能够根据设计等进行各种变更。并且,以下有时对说明过一次的结构标注相同的符号,省略说明。
37.以下,按以下顺序对实施方式进行说明。
38.<1.手术系统的结构>
39.<2.运算/控制部的功能结构>
40.<3.实施方式的处理例>
41.<4.总结>
42.<1.手术系统的结构>
43.对眼球手术中的手术系统100的结构进行说明。
44.图1中示意地示出了手术系统100所具有的结构的一例。
45.手术系统100构成为具有手术台1和手术支援装置2。
46.手术台1和手术支援装置2设置于手术室内。
47.被施术者(患者)3以仰卧的状态躺在手术台1上。施术者(医生)4位于被施术者3的头部侧的位置,使用各种医疗工具5来进行被施术者3的眼球30(参考图2)内部的手术。医疗工具5例如使用玻璃体切割器或镊子、灌流液等的注入器等。
48.图2中示意地示出了眼球30的截面结构。眼球30的表面被角膜31及结膜32覆盖,角膜31的里侧存在形成有瞳孔33的虹膜34,虹膜34的里侧存在水晶体35。并且,眼球30内部的眼底的一面上存在视网膜36。
49.施术者4例如将医疗工具5插入到结膜32来进行眼球30内部的手术。
50.由施术者4进行的眼球30的手术受手术支援装置2的支援。
51.图3中示意地示出了手术支援装置2所具有的结构的一例。
52.手术支援装置2具有内窥镜保持装置11、内窥镜12、操作部13、运算/控制部14及显示器15。
53.内窥镜保持装置11具有基台部16及臂部17。
54.基台部16载置于手术室的床等,臂部17安装于基台部16。臂部17被基台部16轴支承为能够转动。
55.臂部17形成为具备一个或多个关节部和转动部且能够使臂前端部20移动至任意位置的机构。
56.在此,对臂前端部20的结构进行说明。
57.图4中示意地示出了臂前端部20所具有的结构的一例。
58.臂前端部20具有用于保持内窥镜12的保持器21和用于测量距被施术者3的角膜31为止的距离的测量部22。
59.保持器21形成为能够装卸内窥镜12的机构,通过安装内窥镜12,内窥镜12会固定于保持器21。在内窥镜12固定于保持器21的状态下,通过使臂部17动作,能够使内窥镜12自由地移动至任意位置。
60.通过用保持器21保持插入到被施术者3的眼球30内的内窥镜12,施术者4无需用手保持内窥镜12。因此,施术者4能够用双手进行眼球30的手术。
61.测量部22具有照射部23及摄像部24。
62.照射部23例如为led(light emitting diode(发光二极管)),输出照射被施术者3的眼球30的光。
63.摄像部24具有摄像部24l、24r,以便能够通过所谓的立体法进行测距。摄像部24l、24r例如在保持器21的上部附近隔着规定间隔配置。摄像部24l、24r的光轴平行,焦距彼此相同。并且,帧周期同步,帧速率也一致。
64.通过摄像部24l、24r的各成像元件得到的拍摄图像信号分别经a/d(anal og/digital(模拟/数字))转换,成为以像素单位表示基于规定灰度的亮度值的数字图像信号(拍摄图像数据)。
65.根据在通过照射部23照射眼球30的状态下得到的基于摄像部24l、24r的各成像元件的拍摄图像信号,能够测量摄像部24l、24r至被施术者3的角膜31为止的距离。
66.在测量部22中,照射部23与摄像部24l、24r之间的相对位置关系是固定的。并且,摄像部24l、24r与上述保持器21之间的相对位置关系是固定的。因此,通过将内窥镜12固定于保持器21,照射部23及摄像部24l、24r与内窥镜12之间的相对位置关系会被固定。
67.返回到图3,手术支援装置2的内窥镜12在固定于保持器21的状态下插入到眼球30的内部(参考图2)。通过所插入的内窥镜12来拍摄眼球30内部的状态。通过内窥镜12的成像元件得到的拍摄图像信号分别经a/d转换,成为以像素单位表示基于规定灰度的亮度值的数字图像信号(拍摄图像数据)。
68.基于来自内窥镜12的拍摄图像数据的拍摄图像显示于显示器15的液晶上。
69.操作部13综合表示进行臂部17的操作或显示于显示器15上的基于内窥镜12的拍摄的拍摄图像的旋转操作等时使用的操作设备。操作部13可以为脚踏板,也可以为手动操作的远程操作装置(遥控器)等。在图3中,作为一例,图示了脚踏板,但如上所述,操作部13并无限于此。
70.与操作部13的操作对应的由内窥镜12拍摄到的图像的旋转操作方法的细节待留后述。
71.运算/控制部14执行臂部17的动作控制、显示于显示器15上的各种图像的生成处理、在显示器15上的显示控制处理等实现本实施方式所需的各种处理。
72.运算/控制部14例如构成为具备具有cpu(central processing unit(中央处理器))、rom(read only memory(只读存储器))、ram(random acc ess memory(随机存取存储器))等的微型计算机。运算/控制部14由一个或多个微型计算机来实现。
73.运算/控制部14例如内置于内窥镜保持装置11的基台部16。另外,运算/控制装置14也可以内置于其他外部设备。
74.显示器15根据来自运算/控制部14的显示控制将显示图像6显示于液晶上。
75.图5中示出了显示于显示器15上的显示图像6的一例。
76.显示器15上例如显示有显示图像6,所述显示图像6包括内窥镜拍摄图像61、眼球映射图像62、内窥镜视点映射图像63、插入长度提示图像64等。显示图像6根据需要还包括与各种信息相关的图像。
77.内窥镜拍摄图像61为基于来自内窥镜12的拍摄图像数据的拍摄图像。作为内窥镜拍摄图像61,例如显示由内窥镜12拍摄到的眼球30的内部的状态。内窥镜拍摄图像61可以通过操作部13的操作来旋转。内窥镜拍摄图像61的旋转方法的细节待留后述。
78.眼球映射图像62表示眼球30与内窥镜12之间的位置关系。
79.眼球映射图像62中,眼球30由三维眼球模型图像30a来显示。并且,内窥镜12相对于眼球30的位置由内窥镜模型图像12a来显示。
80.内窥镜视点映射图像63中显示有表示内窥镜12的内窥镜模型图像12b和内窥镜12的视点下的被施术者3的三维模型图像300。三维模型图像300中显示有眼球模型图像30b。
81.内窥镜视点映射图像63与内窥镜拍摄图像61的旋转联动地旋转。此时,在内窥镜视点映射图像63中,三维模型图像300在固定表示内窥镜12的内窥镜模型图像12b的位置的状态下旋转。内窥镜视点映射图像63的旋转方法的细节待留后述。
82.插入长度提示图像64中显示有内窥镜12相对于眼球30的插入长度的数值及内窥镜前端部120至视网膜36为止的距离的数值。
83.施术者4一边确认显示于显示器15上的显示图像6,一边进行眼球30的手术。
84.<2.运算/控制部的功能结构>
85.对手术支援装置2中的运算/控制部14的功能结构进行说明。
86.图6中以框图的形式示出了手术支援装置2的构成的一例。
87.运算/控制部14具有驱动控制部141、图像处理部142、位置判定部143、图像生成部144及显示控制部145。
88.驱动控制部141例如根据从操作部13输入的操作信号来进行内窥镜保持装置11的臂部17的关节部和转动部的动作控制。驱动控制部141通过进行臂部17的动作控制,能够使固定于臂前端部20的保持器21的内窥镜12的位置移动。
89.并且,驱动控制部141进行照射部23的输出控制或摄像部24的拍摄控制。
90.图像处理部142对基于内窥镜12的拍摄的图像信号实施亮度信号处理、颜色处理、分辨率转换处理、编解码处理等各种信号处理。图像处理部142将经各种信号处理的图像信号输出至图像生成部144。
91.位置判定部143根据从摄像部24输入的基于摄像部24l、24r的各成像元件的眼球30的拍摄图像信号对摄像部24至角膜31为止的距离即拍摄距离进行运算。
92.并且,位置判定部143根据该拍摄距离对眼球30与内窥镜前端部120之间的相对位置关系进行运算。
93.位置判定部143将判定结果(眼球30与内窥镜前端部120之间的相对位置关系)输出至图像生成部144。
94.图像生成部144使用来自图像处理部142、位置判定部143、操作部13等的各种输入信息来生成如图5所示的显示图像6。构成显示图像6的各种图像的生成方法的细节待留后述。
95.图像生成部144将生成的显示图像6的图像信号输出至显示控制部145。
96.显示控制部145根据从图像生成部144输入的图像信号来进行使显示图像6显示于显示器15上的控制。
97.<3.实施方式的处理例>
98.对手术支援装置2的运算/控制部14为了实现本实施方式而执行的处理进行说明。在此,作为一例,假设施术者4位于被施术者3的头部侧的位置进行手术(参考图1)。
99.图7是表示运算/控制部14所执行的处理的一例的流程图。并且,图8中示出了用于
判定眼球30与内窥镜12之间的位置关系的步骤的概要。
100.在步骤s101中,运算/控制部14进行照射开始控制处理。
101.在照射开始控制处理中,如图8a所示,运算/控制部14使照射部23输出用于照射眼球30的光25。另外,在图8a中,用虚线示意地示出了从照射部23输出的光25。
102.照射开始控制处理为判定用于生成后述的内窥镜视点映射图像63的图像数据的眼球30与内窥镜12之间的位置关系时所需的处理。
103.然后,运算/控制部14按图像的每1帧定时反复执行步骤s102以后的处理。
104.在步骤s102中,运算/控制部14将作为由内窥镜12拍摄眼球30内部而得的拍摄图像数据的各帧图像数据存储到内部存储器中。
105.在步骤s103中,运算/控制部14获取图像旋转角数据。
106.图像旋转角数据为表示进行来自内窥镜12的拍摄图像数据的旋转处理时使用的该拍摄图像数据的旋转方向及旋转角度的信息。
107.图像旋转角数据根据来自操作部13的操作输入适当进行更新。但是,若内窥镜12的拍摄方向根据臂部17的动作而发生变动,则图像旋转角数据不会进行更新。
108.在运算/控制部14开始图7的处理至检测到来自操作部13的操作输入为止的期间(以下,还称为初始状态。),图像旋转角数据为指定针对内窥镜拍摄图像的旋转处理的角度0
°
的值。
109.若检测到来自操作部13的操作输入,则运算/控制部14根据其操作量来更新图像旋转角数据。例如,由更新后的图像旋转角数据的角度的正负表示旋转方向。图像旋转角数据的更新处理的细节待留后述。
110.在接下来的步骤s104中,运算/控制部14根据来自内窥镜12的拍摄图像数据及图像旋转角数据来生成内窥镜拍摄图像61的图像数据。
111.此时,运算/控制部14至少生成使来自内窥镜12的拍摄图像数据以基于图像旋转角数据的方向及角度旋转而得的内窥镜拍摄图像61的图像数据。
112.并且,在初始状态的情况下,旋转角度0
°
被指定为图像旋转角数据,因此运算/控制部14在不使来自内窥镜12的拍摄图像数据旋转的情况下生成作为内窥镜拍摄图像61的图像数据。
113.在步骤s105中,运算/控制部14执行眼球映射图像62及内窥镜视点映射图像63的图像生成处理。参考图9对该图像生成处理进行说明。图9是表示运算/控制部14所执行的该图像生成处理的一例的流程图。
114.在步骤s201中,运算/控制部14将作为由摄像部24l、24r拍摄眼球30而得的拍摄图像数据的各帧图像数据存储到内部存储器中。
115.在步骤s202中,运算/控制部14根据作为各帧的两个拍摄图像数据来进行识别照在眼球30或眼球30的角膜31上的来自照射部23的光25的光点等各种图像分析处理。
116.在步骤s203中,运算/控制部14根据如图8b所示的照在角膜31上的光点的位置的偏离量l通过三角测量的原理对通过摄像部24l、24r得到的一对拍摄图像数据(立体图像)运算摄像部24至角膜31为止的距离即拍摄距离。
117.运算/控制部14根据运算出的拍摄距离来判定摄像部24与眼球30之间的位置关系。
118.此时,作为眼球30的尺寸的数据,使用眼球模型数据。
119.眼球模型数据例如为假设成普通的人的眼球尺寸的三维数据。人的眼球尺寸尽管会存在一些个体差异,但相差不会太大,因此预先设定为基于标准的人的眼球尺寸的眼球模型数据。
120.通过使用拍摄距离和眼球模型数据,运算/控制部14能够运算出(判定)摄像部24与眼球30之间的位置关系。
121.另外,也可以在手术时预先测定被施术者3的眼球30的眼球尺寸,并反映该测定结果来设定眼球模型数据。
122.在接下来的步骤s204中,运算/控制部14根据摄像部24与眼球30之间的位置关系来判定内窥镜12与眼球30之间的位置关系。
123.内窥镜12固定于臂前端部20的保持器21,由此其与摄像部24之间的相对位置关系被固定。因此,在内窥镜12固定于保持器21的状态下,内窥镜12的位置自然地根据摄像部24的位置而被规定。
124.并且,固定于保持器21的内窥镜12在轴向上至内窥镜前端部120为止的形状尺寸是已知的。因此,通过预先设定与内窥镜12的形状尺寸相关的信息,运算/控制部14能够根据规定的内窥镜12的位置来运算出内窥镜前端部120的位置。
125.根据以上内容,运算/控制部14能够根据眼球30与摄像部24之间的位置关系来运算出(判定)内窥镜12(内窥镜前端部120)相对于眼球30的位置关系。
126.在接下来的步骤s205中,运算/控制部14生成将所判定的眼球30与内窥镜12(内窥镜前端部120)之间的位置关系表示为三维眼球模型图像30a与内窥镜模型图像12a之间的位置关系的眼球映射图像62的图像数据(参考图8c)。
127.进而,在步骤s206中,运算/控制部14生成如图5所示的内窥镜视点映射图像63的图像数据。内窥镜视点映射图像63由表示被施术者3的头部的三维模型图像300和表示内窥镜12的内窥镜模型图像12b构成。三维模型图像300中显示有眼球30的三维眼球模型图像30b。
128.被施术者3的三维模型图像300使用预先设定的人的三维模型数据。
129.并且,表示被施术者3的头部相对于内窥镜12的角度的值在被施术者3以仰卧的方式躺在手术台1上的状态下以内窥镜保持装置11相对于手术台1的设置角度被规定为前提预先设定为头部角度数据。
130.运算/控制部14根据三维模型数据和头部角度数据来生成具有三维眼球模型图像30b的三维模型图像300的图像数据。
131.然后,运算/控制部14根据步骤s204中判定的眼球30与内窥镜12之间的位置关系来合成三维模型图像300和内窥镜模型图像12b,由此生成内窥镜视点映射图像63的图像数据。
132.在内窥镜视点映射图像63中,显示有从内窥镜12的视点观察三维模型图像300的头部时的图像。
133.并且,运算/控制部14根据图7的步骤s103中获取到的图像旋转角数据来生成经旋转处理的内窥镜视点映射图像63的图像数据。
134.此时,运算/控制部14生成在固定内窥镜模型图像12b的位置的状态下使三维模型
图像300旋转而得的图像数据作为内窥镜视点映射图像63。
135.另外,在初始状态的情况下,旋转角度0
°
被指定为图像旋转角数据,因此运算/控制部14生成未使内窥镜视点映射图像63旋转的图像数据作为内窥镜视点映射图像63。
136.运算/控制部14通过结束步骤s206的处理来完成图7的s105中的眼球映射图像62及内窥镜视点映射图像63的生成处理。
137.接着,运算/控制部14使处理进入步骤s106。
138.在步骤s106中,运算/控制部14生成显示图像6的图像数据。
139.运算/控制部14通过合成内窥镜拍摄图像61、眼球映射图像62、内窥镜视点映射图像63、插入长度提示图像64、其他必要图像来生成显示图像6。
140.在此,对插入长度提示图像64的图像数据的生成方法的例进行说明。
141.运算/控制部14根据所判定的眼球30与内窥镜12(内窥镜前端部120)之间的位置关系来运算出与内窥镜12在眼球30中的插入长度相关的信息和与内窥镜前端部120至被施术者3的视网膜36为止的距离相关的信息。
142.然后,运算/控制部14根据这些信息来生成插入长度提示图像64的图像数据。
143.在接下来的步骤s107中,运算/控制部14进行用于使显示图像6显示于显示器15的液晶上的显示控制。由此,会在显示器15的同一画面内显示如图5所示的显示图像6。
144.在施术者4对眼球30进行手术的期间,如图10所示,有时医疗工具5会映现于内窥镜拍摄图像61中。此时,根据医疗工具5的显示位置可知,内窥镜拍摄图像61的上下左右方向与图1所示的施术者4进行眼球30内部的手术的方向并不一致。
145.这是因为,在调节插入到眼球30内的内窥镜12的位置时,内窥镜12会发生以纵轴为中心的扭转。若在发生这种扭转的状态下通过内窥镜12拍摄眼球30内部,则显示器15上会显示上下左右方向与施术者4进行手术的方向不一致的内窥镜拍摄图像61。
146.在这种情况下,为了使手术顺畅地进行,施术者4需要通过操作部13的操作使内窥镜拍摄图像61旋转至容易观察的位置(例如,图11所示的位置)。
147.因此,运算/控制部14进行图7的步骤s108、步骤s109的处理。
148.在步骤s108中,运算/控制部14判定是否检测到来自操作部13的操作输入。操作输入例如通过施术者4用脚操作脚踏板来进行。
149.在步骤s108中未检测到操作输入的情况下,运算/控制部14使处理返回到步骤s102,然后执行相同的处理。
150.即,在初始状态下,未旋转的状态的内窥镜拍摄图像61及内窥镜视点映射图像63显示于显示器15上。
151.另一方面,在步骤s108中检测到操作输入的情况下,运算/控制部14使处理从步骤s108进入步骤s109。
152.在步骤s109中,运算/控制部14进行图像旋转角数据的更新处理。
153.运算/控制部14根据来自操作部13的操作输入来更新旋转方向及旋转角度作为图像旋转角数据。
154.在进行步骤s109的处理之后,运算/控制部14使处理返回到步骤s102。然后,运算/控制部14进行步骤s102至步骤s104的处理,生成根据更新后的图像旋转角数据使来自内窥镜12的拍摄图像数据旋转而得的内窥镜拍摄图像61的图像数据。
155.通过执行这种处理,能够根据操作部13的操作在不使内窥镜12在眼球30内部发生位移的情况下使显示于显示器15上的内窥镜拍摄图像61持续旋转。例如,能够使内窥镜拍摄图像61从图10所示的位置旋转至图11所示的位置。
156.在接下来的步骤s105的内窥镜视点映射图像63的生成处理中,运算/控制部14生成在固定内窥镜模型图像12b的位置的状态下根据更新后的图像旋转角数据使三维模型图像300旋转而得的内窥镜视点映射图像63的图像数据。
157.此时,三维模型图像300以被固定的内窥镜模型图像12b为基准进行旋转。例如,与内窥镜拍摄图像61从图10所示的位置旋转至图11所示的位置联动地,使三维模型图像300相对于内窥镜模型图像12b从图10所示的位置旋转至图11所示的位置。
158.如此,通过使三维模型图像300根据图像旋转角数据进行旋转,能够生成与内窥镜拍摄图像61的旋转联动地旋转的内窥镜视点映射图像63的图像数据。
159.然后,在步骤s106中,运算/控制部14生成包括旋转后的内窥镜拍摄图像61及内窥镜视点映射图像63的显示图像6的图像数据。
160.然后,在步骤s107中,运算/控制部14进行用于使显示图像6显示于显示器15的液晶上的显示控制。
161.通过运算/控制部14的显示控制,根据施术者4的操作部13的操作旋转的内窥镜拍摄图像61显示于显示器15上。并且,与内窥镜拍摄图像61的旋转联动地旋转的内窥镜视点映射图像63显示于显示器15上。
162.若使内窥镜拍摄图像61旋转,则有时难以根据内窥镜拍摄图像61的影像在空间上掌握眼球30与内窥镜12之间的位置关系(例如,内窥镜12相对于眼球30的插入状态(拍摄方向))。在这种情况下,通过确认与内窥镜拍摄图像61的旋转联动地旋转的内窥镜视点映射图像63,便能够轻易地掌握内窥镜12相对于眼球30的插入状态。
163.在施术者4对操作部13持续进行操作的期间,通过运算/控制部14持续执行步骤s102至步骤s109为止的处理。
164.施术者4例如持续进行操作部13的操作以使内窥镜拍摄图像61旋转,直至映现于内窥镜拍摄图像61中的医疗工具5到达容易进行手术的位置为止。
165.当施术者4对操作部13的操作结束时,运算/控制部14判定在步骤s108中未检测到操作输入。此时,运算/控制部14使处理从步骤s108返回到步骤s102,然后反复执行步骤s102至步骤s108的处理,直至在步骤s108中检测到操作输入为止。
166.此时,运算/控制部14根据最后更新的图像旋转角数据来生成内窥镜拍摄图像61及内窥镜视点映射图像63的图像数据,进行在显示器15上的显示控制。由此,内窥镜拍摄图像61及内窥镜视点映射图像63在维持旋转停止时点的旋转角度的状态下显示于显示器15上。
167.另外,即使为了改变内窥镜12的拍摄方向而使通过臂部17的动作控制被保持器21保持的内窥镜12移动,图像旋转角数据也不会被运算/控制部14更新。
168.因此,在维持基于最后更新的图像旋转角数据的旋转的状态下仅改变拍摄方向的内窥镜拍摄图像61显示于显示器15上。
169.因此,施术者4在改变内窥镜12的拍摄方向时无需通过操作部13的操作再次使内窥镜拍摄图像61旋转。
170.并且,在内窥镜视点映射图像63中,维持与内窥镜拍摄图像61的旋转状态联动的状态。另外,在内窥镜12的拍摄方向发生变动的情况下,内窥镜视点映射图像63中的三维模型图像300相对于内窥镜模型图像12b的位置会发生变动。
171.若在反复执行步骤s102至步骤s108的处理的期间在步骤s108中再次检测到操作输入,则运算/控制部14以步骤s109、步骤s102的顺序进行处理,然后执行相同的处理。
172.<4.总结>
173.本发明的实施方式中的手术支援装置2具备:臂部17,具有用于保持内窥镜12的保持器21,并且在通过保持器21保持内窥镜12的状态下调节内窥镜12的位置;图像生成部144,生成显示有被保持器21保持的内窥镜12的视点下的被施术者3的三维模型图像300的内窥镜视点映射图像63;显示控制部145,进行内窥镜视点映射图像63和由内窥镜12拍摄到的内窥镜拍摄图像61的显示控制;及操作部13,用于使内窥镜拍摄图像61旋转,所述手术支援装置2根据操作部13的操作在不使内窥镜12发生位移的情况下使显示的内窥镜拍摄图像61旋转,并且使内窥镜视点映射图像63与该旋转联动地旋转(参考图7及图8等)。
174.由此,显示表示对应于旋转后的内窥镜拍摄图像61的状态的内窥镜12与被施术者3之间的位置关系的内窥镜视点映射图像63。
175.因此,施术者4能够在空间上掌握内窥镜12相对于被施术者3的眼球30的插入状态。因此,即使在内窥镜拍摄图像61被旋转的状态下,施术者4也能够进行直观地掌握位置关系的手术,从而能够顺畅地进行对眼球30的手术。并且,能够掌握内窥镜12的位置,因此施术者4能够防止与内窥镜12等接触。
176.在本实施方式中的手术支援装置2中,内窥镜视点映射图像63的旋转在固定表示内窥镜12的图像的位置的状态下进行(参考图7的s105、图9的s205、图10、图11等)。
177.由此,与内窥镜拍摄图像61的旋转状态无关地,内窥镜视点映射图像63总会在映现有表示内窥镜12的图像的状态下显示。
178.因此,通过视觉辨认内窥镜视点映射图像63,与内窥镜拍摄图像61的旋转无关地,能够始终确认到内窥镜12相对于被施术者3的眼球30的插入状态。因此,能够顺畅地进行对眼球30的手术。
179.在本实施方式中的手术支援装置2中,显示控制部145在同一画面内显示内窥镜视点映射图像63和内窥镜拍摄图像61(参考图5、图7的s107等)。
180.由此,在一边视觉辨认内窥镜拍摄图像61一边进行手术时,能够在不将视线转移到其他显示器15的情况下确认内窥镜视点映射图像63。
181.因此,能够提高内窥镜视点映射图像63的视觉辨认性,以顺畅地进行对眼球30的手术。
182.在本实施方式中的手术支援装置2中,显示控制部145在同一画面内显示在三维眼球模型上表示内窥镜12的位置的眼球映射图像62和内窥镜视点映射图像63(参考图5、图7的s107等)。
183.由此,在确认内窥镜视点映射图像63时,能够在不将视线转移到其他显示器15的情况下确认眼球映射图像62。
184.因此,能够在一个显示器15上同时确认多个信息,因此能够顺畅地进行对眼球30的手术。
185.另外,在本实施方式中,作为内窥镜12的一例,对眼科内窥镜的例子进行了说明,但内窥镜12并不限于眼科内窥镜。例如,可以适用切开被施术者3的肋骨之间插入的胸腔镜或切开腹部插入的腹腔镜等各种内窥镜。
186.最后,本发明中记载的实施方式仅为示例,本发明并不限定于上述实施方式。并且,实施方式中说明的所有结构的组合并不一定是解决课题时必不可少的。进而,本发明中记载的效果仅为示例,并不受限定,其可以发挥其他效果,也可以发挥本发明中记载的效果的一部分。
187.符号说明
188.2-手术支援装置,3-被施术者,12-内窥镜,13-操作部,17-臂部,21-保持器,30-眼球,30a-三维眼球模型图像,30b-三维眼球模型图像,61-内窥镜拍摄图像,62-眼球映射图像,63-内窥镜视点映射图像,144-图像生成部,145-显示控制部,300-三维模型图像。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1