运动评估仪的制作方法
本发明涉及一种用于测量身体灵活性和运动范围的方法和装置。
背景技术:
1、在评估医疗患者的身体灵活性和运动范围时,一般使用测角仪来测量肢体、关节和身体弯曲的关节运动。
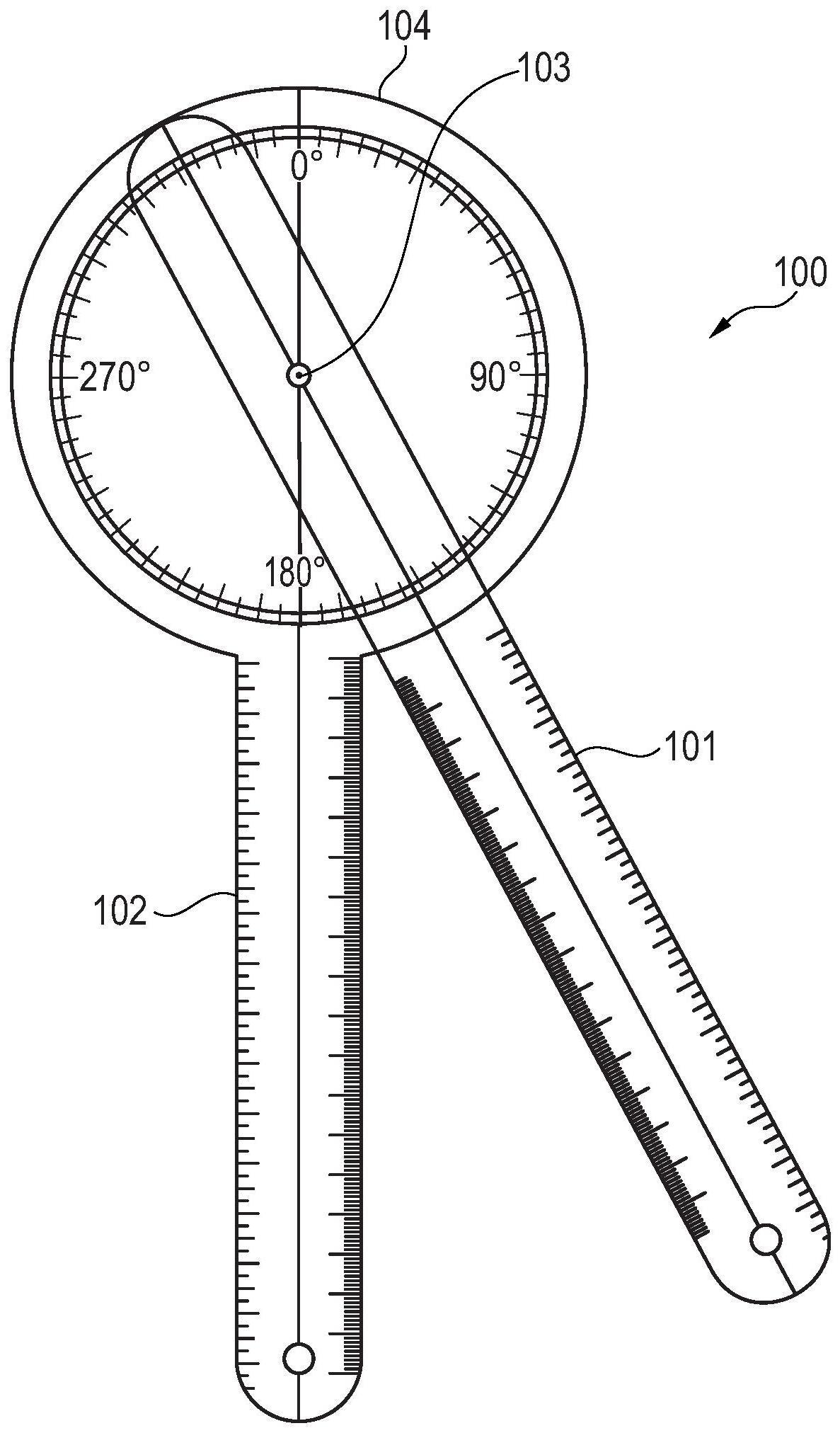
2、如本发明图1所示,是一种已知的物理测角仪100,包括一对通过可旋转接头103连接的长臂101、102,每个臂都有一个距离尺刻度,用于测量从枢轴点出发的距离,这些臂可围绕枢轴点相互旋转,在其中一个臂的一端提供了一个圆形量角器104,上面有一个标有角度的刻度圈,角度是从与第一臂的主要中心长度轴对应的固定基准点出发。
3、如本发明图2和图3所示,在使用中,为了测量两个身体部分的弯曲或运动角度,例如人的肘关节,执业医师或临床医生通过估计将枢轴点的中心与肘关节的标称旋转中心对齐,并且在视觉上将测角仪的第一臂与上臂的主长度方向对齐,在视觉上将测角仪的第二臂与手臂的下部对齐。患者被要求最大限度地伸展或弯曲他们的手臂,医生将测角仪的第一和第二臂重新对准手臂上下部分的主要长度方向,通过使用刻度量角器目视读取两个测角仪臂之间的角度进行角度测量。为测量肘关节的最大关节活动范围,在患者手臂的最大伸展处获取第一个角度读数,并在患者手臂的最大弯曲处获取第二个角度读数。
4、如本发明图4所示,是一种已知的数字医用测角仪,是图1所示的传统机械测角仪的发展。数字测角仪的优点是,在测角仪臂的枢轴点上没有用物理圆板量角器来测量两臂之间的角度,而是提供了一个数字电子表来测量两个测角仪臂之间的角度,并在液晶显示器上显示。
5、已知的数字测角仪的使用与机械测角仪的使用类似,但执业医师不是读取机械刻度尺的角度,而是读取液晶显示的数字角度,与机械测角仪相比,读取两臂之间的角度的准确度要高一个数量级。
6、也有各种已知的用于手持计算设备的应用程序,包括提供测角仪功能和测量身体运动范围的智能手机。其中包括已知的ratefast测角仪应用程序和已知的goniometer-pro(g-pro)应用程序。
7、如本发明图5所示,是一种已知的ratefast测角仪应用程序在一种操作模式下的屏幕视图,在该操作模式中,智能手机或其他手持计算设备的摄像机被用来拍摄要测量的肢体的视频或静态数字图像。
8、测角仪应用程序将机械测角仪的图片覆盖到通过智能手机或其他手持计算设备的数码摄像机查看的屏幕图像上。测角仪的屏幕图像与屏幕的关联是固定的,因此与智能手机的关联也是固定的。用户可以用智能手机对被测对象的姿态进行最初的参考,通过将屏幕上测角仪图像的中心点与关节图像的中心在视觉上对齐,运动智能手机直到测角仪中心与关节的中心重合,并且测角仪图像的主要下臂基本保持垂直。用户捕捉到这个初始方位图像,应用程序也捕获了智能手机的初始方位数据,以用作来自智能手机内部姿态传感器的参考方位。
9、然后,用户将屏幕呈现的测角仪的主臂与关节一侧的第一肢体部分的主长度对齐,例如上臂部分。在智能手机的第一方位上捕获第一图像,第一方位是指将智能手机保持在对应于关节一侧的第一身体部分的主长度轴的方位。该应用程序通过智能手机中的倾角仪或加速度计的数据来确定智能手机在第一方位的方向。然后,用户倾斜整个智能手机,使屏幕上测角仪图像的主长度与关节另一侧的第二身体部分的主长度对齐,并在智能手机的第二方位上捕获第二图像。该应用程序通过智能手机中的倾角仪和/或加速度计测量智能手机的姿态,以获得相对于垂直方向的第二个角度/方向。
10、然后应用程序计算第一和第二方向之间的角度差,该角度差与被测量的关节的角度相对应。
11、在另一种操作模式中,用户不需要将测角仪的屏幕图像与对象的四肢部分或关节两侧的身体部分对齐,而是简单地将整个智能手机定向,使得设备的长度与身体部分的主要长度平行。例如,为了测量肘关节的屈曲角度,用户将智能手机的屏幕长度与上臂部分的主要长度对齐,并捕获第一个读数,这将使应用程序从智能手机内置的加速度计数据中记录方向数据(与垂直方向的角度),然后重复操作,通过将智能手机的屏幕与关节另一侧的下臂部分的主要长度对齐来捕获另一个读数,该应用程序通过智能手机内的方向传感器或加速度计的读数来记录智能手机的方向。
12、如本发明图7所示,是一种已知的goniometer-pro(g-pro)测角仪设备的屏幕视图,该设备也用于智能手机或其他手持计算设备,向用户展示如何将该设备连接到他们的手臂来测量肢体角度。在g-pro系统中,角度测量来自手持设备的内部加速度计。这需要在已知的初始姿态或方向上对设备进行初始校准,随后根据对已知初始方向的加速度和减速度的测量来确定运动角度。
13、现有技术中已知的测角仪有以下的问题。机械测角仪误差是由于机械臂的长度与肢体部分的长度未对准而产生的,并且从机械量角器上目视读取角度的准确度存在限制。用户需要靠近对象,不能从远处观察对象的姿势。此外,可能需要不止一种类型的测角仪。可能需要一系列在不同尺度上操作的测角仪,以涵盖身体的不同运动尺度,例如臀部的摆动和手指的弯曲。对于解剖学的不同部位,可能需要较大和较小尺寸的测角仪。
14、在图4的数字测角仪的情况中,测角仪的两臂之间的角度测量得到改进,但是角度测量的准确度仍然受到测角仪臂与身体部分的主长度轴对齐的限制。
15、在已知的用于智能手机的goniometer-pro应用程序中,用户将智能手机绑在他们的肢体上,例如他们的前臂,然后锻炼肢体,例如通过一系列动作运动他们的手臂。智能手机相对于水平或垂直的角度是用智能手机中内置的加速度计测量的。
16、在用于智能手机或其他手持设备的电子测角仪应用程序的情况中,由于智能手机屏幕的主长度或智能手机屏幕的中心轴与身体部分的主长度的未对准,会产生测量误差,还会有依赖于加速度计的手持计算设备的内置传感器提供的方向读数的准确度限制。加速度计需要以标称的垂直方向为基准,并通过测量手持计算设备相对于初始基准位置旋转或倾斜时的加速度和减速度来确定手持设备的方向。
17、已知的电子测角仪智能手机应用程序需要一个将智能手机保持水平或直立的设置过程,并且需要用户学习如何执行设置过程。用户必须将智能手机水平或直立放置,以便设备内部的数字电子水平仪记录下参考姿态。
18、对于已知的电子测角仪,执业医师需要和被测量的人一起在场,以便他们能够进行设置过程和测量。或者,如果测量对象在远离医生的情况下使用已知的电子测角仪,他们需要进行如何使用的培训。
技术实现思路
1、本发明的第一方面提供了一种描述对象的解剖学特征的数据处理方法;
2、输入数据包括第一个三维坐标空间中的多个点坐标,多个点坐标代表对象的解剖学特征;
3、方法如下:
4、确定多个点坐标的一个或多个几何参数;
5、将确定的几何参数与存储在数据库中的各组预先确定的几何参数进行比较,每组预先确定的几何参数对应于存储在数据库中的各自预先存储的运动类型;以及
6、根据比较的结果,通过预存的运动类型识别多个点坐标的运动。
7、作为优选的技术方案,如上所述的一种描述对象的解剖学特征的数据处理方法,包括将多个点坐标分为点组,每个点组代表离散的解剖学特征。
8、作为优选的技术方案,如上所述的一种描述对象的解剖学特征的数据处理方法,包括确定各个点组之间的角度,每个点组代表解剖学特征。
9、如上所述的一种描述对象的解剖学特征的数据处理方法,包括确定代表第一解剖学特征的第一点组与代表第二解剖学特征的第二点组之间的角度。
10、如上所述的确定多个点坐标的一个或多个几何参数的过程包括确定以下参数:
11、点坐标对之间的角度;
12、与一组点坐标重合的一条或多条线;
13、两组不同的点坐标之间的角度;
14、两组不同的点坐标之间的相对运动;
15、三维坐标空间内单个点的运动速度;
16、三维坐标空间中每组点坐标的运动速度;
17、各个组坐标之间的相对运动速度;
18、与点坐标组重合的线的方向;
19、各组点坐标在三维坐标空间中的方向;
20、各组点坐标在三维坐标空间中的旋转方向;
21、各组点坐标在三维坐标空间中的旋转速度;
22、三维坐标空间内单个点的平移运动;
23、三维坐标空间内各组点坐标的平移运动。
24、如上所述的一种描述对象的解剖学特征的数据处理方法,包括通过将第一个坐标空间中的多个三维坐标变换为相应的第二个坐标空间中的多个点坐标来预处理输入数据。
25、如上所述的点坐标代表的解剖学特征包括:
26、对象的骨骼关节;
27、对象的单个肢体;
28、对象的单个肢体部分;
29、对象的单个骨头;
30、对象的单个骨头组合。
31、作为优选的技术方案,如上所述的一种描述对象的解剖学特征的数据处理方法,包括生成实时量角器用于显示至少两组点坐标之间的角度。
32、如上所述的一种描述对象的解剖学特征的数据处理方法,包括以下步骤:
33、通过比较代表解剖学特征的第一组三维坐标的方向与存储的用于解剖学特征的参考方向,来比较对象的姿势;以及
34、相对于参考方向,辨别该组三维坐标的方向是否超出预先确定的方向范围。
35、作为优选的技术方案,如上所述的一种描述对象的解剖学特征的数据处理方法,还包括在三维坐标空间中捕获对象的视频图像;
36、生成一个量角器,该量角器随着对象的运动而实时运动;并且
37、将量角器覆盖在视频图像上。
38、本发明的第二方面提供了一种确定对象的运动范围的方法,方法如下:
39、(1)在第一个三维坐标空间中捕获对象的二维图像;
40、(2)接收一组数据点,该组数据点表示第一个三维坐标空间中的多个点;
41、(3)从多个点中识别单个点组,其中每个识别的点组对应于对象的解剖学特征;以及
42、(4)将识别的点组中的各个点的相对位置与存储在参考数据库中的相对位置数据进行比较。
43、优选地,参考数据库中的预存位置数据,每个都分别与对象的相应姿势或运动锻炼有关。
44、优选地,参考数据库中的预存位置数据被安排为一组预先确定的配置文件,每个配置文件代表一种姿势或一种运动。
45、优选地,数据库中的预存数据包括角度数据。
46、如上所述的一种确定对象的运动范围的方法,包括将三维空间中识别的点组中的各个点的运动与作为记录存储在参考数据库中的参考运动数据进行比较。
47、如上所述的比较是指,将一组用来描述识别的点组的运动的参数与预定参数的相应参考组比较,预定参数如下:
48、·运动速度;
49、·运动方向;
50、·运动距离;
51、·运动角度;
52、·加速度;
53、·减速度;
54、·运动的主要肌肉;
55、·运动的辅助肌肉;
56、如上所述的一种确定对象的运动范围的方法,包括将识别的点组中的各个点的相对方向与存储在参考数据库中的预定方向进行比较。
57、如上所述的一种确定对象的运动范围的方法,包括将表示第一个三维坐标空间中的点的多个数据点映射为对应于第二个三维坐标空间中的多个点的数据点。
58、如上所述的一种确定对象的运动范围的方法,包括:
59、分析第一个识别的点组的运动;
60、分析第二个识别的点组的运动;
61、比较第一个和第二个识别的点组的运动以确定相对运动;以及
62、将第一个和第二个识别的点组之间的相对运动与多个预定的相对运动记录进行比较,每个记录对应于特定的运动或锻炼;以及
63、根据比较,从多个预定的运动类型中识别出其中一种。
64、如上所述的一种确定对象的运动范围的方法,包括生成测量角度数据的量角器。角度数据可以实时动态测量。根据描述角度随着时间变化的数据,可以确定以下参数:角速度;角加速度;角减速度。
65、如上所述的一种确定对象的运动范围的方法,包括:
66、确定识别的点组的运动路径;以及
67、生成一个量角器,该量角器与识别的点组的运动路径相同。
68、如上所述的量角器在三维坐标空间中的主平面与代表解剖学特征的点组在三维空间中的运动轨迹所在平面一致。
69、如上所述的量角器包括三维坐标空间中的半圆形的弧。
70、如上所述的量角器的径向延伸的指向和代表解剖学特征的一点组的主方向一致。
71、预定目标角度显示为带状或线状。
72、如上所述的一种确定对象的运动范围的方法,还包括:
73、输入描述在过程(3)中识别的外部解剖学特征相对应的内部解剖学特征的三维模型的数据;以及
74、生成内部解剖学特征的三维模型的渲染图像。
75、如上所述的一种确定对象的运动范围的方法,还包括指定三维模型的方位角;以及
76、实时更新指定角度,相当于一点组的实时运动角度与对象的解剖学特征一致。
77、本发明的第三方面提供了一种确定对象在第一坐标系中的正确姿势的方法,方法如下:
78、接收用于描述三维坐标空间中对应对象的一个或多个解剖学特征的多个点的点坐标数据流;
79、将点坐标数据与代表正确姿势的多个预定参考数据进行比较;
80、如果接收到的点坐标数据与参考数据的差异超过预定量,则生成警告消息,表示点坐标数据不在多个参考数据的预定限制内。
81、如上所述的将点坐标数据与多个预定参考数据进行比较的过程包括:
82、识别点坐标数据中与对象的身体部位相对应的各组三维坐标点;
83、识别点坐标数据的各组三维坐标点之间的对应角度;
84、将点坐标数据的各组角度与参考数据的对应角度相匹配。
85、如上所述的一种确定对象在第一坐标系中的正确姿势的方法,包括:
86、将通过一对三维坐标点的第一条线的方位角与存储在参考数据中的第二条线的方位角进行比较;以及
87、确定第一条线的方位角与第二条线的方位角是否相差一个预定角度范围之外的角度。
88、本发明的第四方面提供了一种手持式便携式电子测角仪装置,包括:
89、用于捕获包括三维坐标空间中的多个点的激光雷达数据流的装置;
90、用于分析多个点的几何形状以确定多个点之间的角度的装置;
91、用于存储多个预先确定的记录的数据库,每个记录包含关于解剖学特征运动角度的信息;以及
92、用于将多个点之间的角度与数据库的预先确定的记录中的角度相匹配的装置。
93、如上所述的一种手持式便携式电子测角仪装置,包括生成量角器的装置,用于表明多个点之间的确定的角度。
94、如上所述的一种手持式便携式电子测角仪装置,包括生成电子测量仪器的装置,用于测量确定的角度。
95、如上所述的一种手持式便携式电子测角仪装置,包括当确定的角度位于存储在数据库的预定记录中的预定角度范围之外时的检测装置。
96、如上所述的一种手持式便携式电子测角仪装置,包括将角度数据发送到动画生成器的装置,用于生成在数据库的预定记录中被识别的结构的动画图像。
97、如上所述的一种手持式便携式电子测角仪装置,还包括报告控制器,用于生成确定角度随着时间变化的视觉报告。
98、本发明的第五方面提供了一种在手持式便携式电子测角仪装置中处理三维数据的方法,方法如下:
99、捕获包括三维坐标空间中的多个点的激光雷达数据流;
100、分析多个点的几何形状以确定多个点对之间的角度;
101、存储多个预先确定的记录,每个记录包含关于解剖学特征的预定运动角度或方向的信息;以及
102、将多个点对之间的确定角度与预先确定的记录中的预先确定的角度相匹配。
103、如上所述的一种在手持式便携式电子测角仪装置中处理三维数据的方法,包括生成用于表明确定角度的量角器。
104、如上所述的一种在手持式便携式电子测角仪装置中处理三维数据的方法,包括生成用于测量确定角度的电子测量仪器。
105、如上所述的一种在手持式便携式电子测角仪装置中处理三维数据的方法,包括检测确定角度何时位于预定的角度范围之外。
106、如上所述的一种在手持式便携式电子测角仪装置中处理三维数据的方法,包括生成在预定记录中被识别的结构的动画图像,动画图像有以确定角度配置的组件。
107、如上所述的一种在手持式便携式电子测角仪装置中处理三维数据的方法,还包括生成确定角度随着时间变化的视觉报告。
108、其他方面如本发明的权利要求中所述。
- 还没有人留言评论。精彩留言会获得点赞!