面向微创手术体表投影轴调整的铰接轴调整方法与流程
面向微创手术体表投影轴调整的铰接轴调整方法
1.本申请是发明专利申请《面向微创手术体表投影调整方法的轴调整方法》的分案申请。
2.原案申请日:2019
‑
03
‑
16。
3.原案申请号:2019102002428。
4.原案发明名称:面向微创手术体表投影调整方法的轴调整方法。
技术领域
5.本发明属于体表投影调整、动作捕捉技术领域,尤其涉及一种面向微创手术体表投影轴调整的铰接轴调整方法。
背景技术:
6.相对于传统开腔手术,微创手术具有创口小、痛感轻、愈合快等优势,迎合了现代人的审美观,因此日益受到广泛关注,应用在部分腹腔和颅腔手术中;目前微创手术主要采用内腔镜,呈现在显示器上供医生观察,观察时医生需要不断地在手术部位和显示器支架移动视线,因此影响手术的连贯性,且容易疲劳,针对上述不足,一些研究者采用基于增强现实技术(augmented reality ar)的患者体表投影法,利用投影机将内腔镜拍摄的图像投影在患者体表,以在需要时辅助医生判断,形成虚拟的表皮透明效果;但在医生需要大范围观察或进行局部观察时,需要助手辅助手持和调整体表投影图像,影响手术连贯性,为此提供一种用于微创手术体表投影的调整装置,通过检测医生腿部的摆动对投影图像进行调整,在检测时需要将人体腿部转动的虚拟轴,与装置的铰接轴调整同轴。
技术实现要素:
7.本发明克服了上述现有技术的不足,提供了一种面向微创手术体表投影调整方法的轴调整方法。
8.本发明的技术方案:一种用于微创手术体表投影的调整装置,包括:大腿垫板,小腿垫板、脚部垫板、底座、第一角度传感器和第二角度传感器,所述底座的上端设置有支撑结构,支撑结构与大腿垫板连接,大腿垫板水平设置,小腿垫板竖直设置,大腿垫板的一端与所述小腿垫板的上端铰接,铰接的可转动面为包含大腿垫板和小腿垫板长度方向的第一转动面,所述小腿垫板的下端与所述脚部垫板转动连接,转动连接的转动面为垂直于所述小腿垫板长度方向所在平面的第二转动面,且脚部垫板与小腿垫板垂直设置,所述第一角度传感器设置在大腿垫板与小腿垫板的铰接处,用于检测所述小腿垫板在第一转动面内相对于大腿垫板转动的角度,所述第二角度传感器设置在小腿垫板与脚部垫板的转动连接处,用于检测所述脚部垫板在第二转动面内相对于小腿垫板转动的角度。
9.进一步地,还包括轴调整件,所述轴调整件根据小腿垫板沿上端铰接轴摆动时,人
体脚部底面与脚部垫板的表面角度的变化调整大腿垫板和小腿垫板的铰接轴在第一转动面上的位置,使铰接轴的轴线与人体大腿和小腿转动的虚拟轴线重合。
10.进一步地,所述大腿垫板的上表面设置有固定垫,固定垫能够适应大腿形状并将人体大腿与小腿连接的一端固定,固定方向为垂直于所述第一转动面的直线方向。
11.进一步地,所述大腿垫板包括:臀部支撑段、大腿支撑段和第一推杆,所述臀部支撑段的支撑面水平设置,所述大腿支撑段的支撑面倾斜设置,且臀部支撑段的下端与所述支撑结构铰接连接,铰接连接的转动面与所述第一转动面平行,所述第一推杆的一端与支撑结构铰接连接,第一推杆的另一端与所述大腿支撑段的下表面铰接连接。
12.进一步地,所述小腿垫板包括:上连接段、下连接段和第二推杆,所述上连接段的下端通过沿上连接段长度方向设置的滑动结构与下连接段连接,下连接段的下端设置有与上连接段长度方向垂直的水平段,水平段上表面与所述脚部垫板转动连接,所述第二推杆的一端与上连接段连接,第二推杆的另一端与下连接段连接。
13.进一步地,所述脚部垫板包括:转台、脚尖夹板、脚跟夹板和第三推杆,所述转台与所述小腿垫板转动连接,转台的两端相对分别设置有脚尖夹板和脚跟夹板,所述脚尖夹板通过滑动结构与转台连接,所述脚跟夹板与转台固定连接,所述第三推杆的一端与脚尖夹板连接,第三推杆的另一端与转台连接。
14.进一步地,所述脚尖夹板的夹紧面上设置有第一弧面,所述脚跟夹板的夹紧面上设置有第二弧面,第一弧面和第二弧面的圆心重合,且圆心位于人体脚部相对于小腿在第一转动面内转动的轴线上。
15.进一步地,所述脚部垫板还包括:第一按键和第二按键,所述第一按键设置在转台上表面靠近所述脚尖夹板的一端,所述第二按键设置在脚尖夹板上端向转台方向延伸的固定块下表面。
16.进一步地,所述底座包括:移动板、固定板、底座弹簧和球轮,所述固定板的上端与所述支撑结构连接,固定板的下端沿竖直方向设置有容纳移动板的移动滑槽,固定板的下表面移动滑槽外侧的环形面为用于支撑的固定平面,所述底座弹簧设置在移动板与固定板之间,所述移动板的下表面设置有若干个球轮,若干个球轮形成的滑动接触面形成用于移动的滑动面。
17.面向微创手术体表投影调整装置的固定垫,包括:变形管、平衡管、截止件和平衡袋,若干条变形管沿弧形布置,形成圆弧形的接触面,变形管内部填充有水,且每个变形管均通过一根平衡管与平衡袋连接,若干根平衡管均穿过截止件,截止件具有可移动的压紧面,用于将平衡管压紧。
18.面向微创手术体表投影调整装置的轴调整件,包括:轴驱动件、第一腰形条、第一固定件、第二腰形条、摆台和第二固定件,所述轴驱动件设置在大腿垫板上,用于调整大腿垫板和小腿垫板的铰接轴在第一转动面上的位置,所述第一腰形条固定在脚尖夹板上,第二腰形条固定在脚跟夹板上,且第一腰形条和第二腰形条外侧均套接有滑套,滑套上设置有用于滑套复位的弹簧结构,所述第一腰形条的侧面设置有第一固定件,第一固定件具有可移动的固定头,固定头能够压紧第一腰形条上的滑套将滑套的位置固定,所述摆台铰接在脚部垫板的上表面,且铰接轴位于人体脚部相对于小腿在第一转动面内转动的轴线下方,所述摆台的上表面与人体脚底面保持接触,摆台能够朝向脚尖夹板或脚跟夹板摆动,且
摆台上设置有摆台传感器用于检测摆台朝向脚尖夹板或脚跟夹板的摆动幅度,所述第二固定件设置在脚部垫板上,第二固定件具有位于所述摆台下方的固定平面,固定平面在所述摆台两个摆动端下方具有距离脚部垫板上表面高度相同的固定面,且固定平面能够沿垂直于脚部垫板表面的方向移动。
19.进一步地,所述轴驱动件包括:轴固定叉、第一轴驱动推杆和第二轴驱动推杆,所述轴固定叉的上端两个叉端上均与一个铰接耳的上端铰接,两个铰接耳的下端均固定在小腿垫板上,所述轴固定叉的下端与第一轴驱动推杆的一端固定连接,第一轴驱动推杆的另一端与第二轴驱动推杆的一端固定连接,第二轴驱动推杆的另一端固定在大腿垫板上,且第一轴驱动推杆和第二轴驱动推杆垂直设置。
20.进一步地,所述第二固定件包括:固定筒、固定筒滑槽和固定筒推杆,所述固定筒的轴线垂直于脚部垫板的上表面设置在摆台的下方,固定筒滑槽设置在脚部垫板上对固定筒沿垂直于脚部垫板的方向滑动进行导向,固定筒的侧面与固定筒推杆的一端连接,固定筒推杆的另一端固定在脚部垫板上。
21.进一步地,所述摆台传感器为第三角度传感器,第三角度传感器的一端与摆台连接,第三角度传感器的另一端固定在脚部垫板上。
22.进一步地,所述摆台传感器包括两个距离传感器,两个距离传感器分别设置在摆台两个摆动端的下方。
23.面向微创手术体表投影轴调整件的轴驱动件,所述轴驱动件包括:轴固定叉、第一轴驱动推杆和第二轴驱动推杆,所述轴固定叉的上端两个叉端上均与一个铰接耳的上端铰接,两个铰接耳的下端均固定在小腿垫板上,所述轴固定叉的下端与第一轴驱动推杆的一端固定连接,第一轴驱动推杆的另一端与第二轴驱动推杆的一端固定连接,第二轴驱动推杆的另一端固定在大腿垫板上,且第一轴驱动推杆和第二轴驱动推杆垂直设置。
24.进一步地,所述第二固定件包括:固定筒、固定筒滑槽和固定筒推杆,所述固定筒的轴线垂直于脚部垫板的上表面设置在摆台的下方,固定筒滑槽设置在脚部垫板上对固定筒沿垂直于脚部垫板的方向滑动进行导向,固定筒的侧面与固定筒推杆的一端连接,固定筒推杆的另一端固定在脚部垫板上。
25.进一步地,所述的轴调整件应用在一种用于微创手术体表投影的调整装置上。
26.进一步地,所述的一种用于微创手术体表投影的调整装置包括:大腿垫板、小腿垫板、脚部垫板、底座、第一角度传感器和第二角度传感器。
27.一种用于微创手术体表投影的调整方法,包括以下步骤:步骤a、大腿固定:主刀医生以一条腿抬起的站立姿势,臀部坐在臀部支撑段上,已抬起的腿部大腿沿大腿支撑段长度方向放置在大腿支撑段上,使医生的大腿与大腿垫板的位置固定;步骤b、小腿长度定位:医生抬起的那条腿的小腿自然下垂,第二推杆收缩,小腿垫板的下连接段向上连接段移动,使小腿垫板的长度变短带动脚部垫板向上移动,直至脚底面与脚部垫板接触,使小腿垫板根据医生小腿长度定位;步骤c、脚部定位:第三推杆拉动脚尖夹板向脚尖移动,脚尖夹板和脚跟夹板将脚部在长度方向上夹持;步骤d、纵坐标量获取:在医生需要输入纵坐标量时,通过向前或向后摆动小腿,小
腿带动小腿垫板以小腿垫板和大腿垫板的铰接轴为轴在第一转动面内摆动,通过第一角度传感器获取小腿垫板摆动的幅度,将小腿垫板的摆动幅度作为纵坐标量进行获取;步骤e、横坐标量获取:在医生需要输入横坐标量时,通过向左或向右扭动脚部,脚部带动脚部垫板以脚部垫板和小腿垫板转动连接的转轴为轴在第二转动面内摆动,通过第二角度传感器获取脚部垫板摆动的幅度,将脚部垫板的摆动幅度作为横坐标量进行获取;步骤f、操作意图获取:在医生需要对体表投影的指定区域进行操作时,通过向上或向下移动脚尖,脚尖沿第一弧面滑动,使脚尖触碰第一按键或第二按键,通过第一按键或第二按键获取医生的操作意图。
28.进一步地,还包括铰接轴位置调整步骤,在脚部定位后,调整大腿垫板和小腿垫板铰接轴在第一转动面内的位置,使铰接轴与医生大腿和小腿转动的虚拟轴重合。
29.进一步地,所述步骤a中进行大腿固定时,通过固定垫适应大腿形状并将医生大腿与小腿连接的一端固定,固定方向为垂直于第一转动面的直线方向。
30.面向微创手术体表投影调整方法的纵坐标量输出方法,设定一个小腿垫板的长度方向与竖直方向的夹角为纵坐标零点,设定第一角度传感器在小腿垫板处于设定的纵坐标零点位置时输出值为零,在医生需要输入纵坐标量时,通过向前或向后摆动小腿,小腿带动小腿垫板以小腿垫板和大腿垫板的铰接轴为轴在第一转动面内摆动,通过第一角度传感器获取小腿垫板摆动的幅度,并将小腿垫板的摆动幅度对应的数值作为纵坐标量进行输出。
31.面向微创手术体表投影调整方法的横坐标量输出方法,设定一个脚部垫板的脚尖夹板与脚跟夹板的连线与第一转动面的夹角为横坐标零点,设定第二角度传感器在脚部垫板处于设定的横坐标零点位置时输出值为零,在医生需要输入横坐标量时,通过向左或向右扭动脚部,脚部带动脚部垫板以脚部垫板和小腿垫板转动连接的转轴为轴在第二转动面内摆动,通过第二角度传感器获取脚部垫板摆动的幅度,并将脚部垫板的摆动幅度对应的数值作为横坐标量进行输出。
32.面向微创手术体表投影调整方法的操作意图输出方法,在医生脚尖向上翘起或向下踩踏时,脚尖沿第一弧面滑动路径能够触及的位置分布设置第一按键和第二按键,分别设定第一按键和第二按键对应一种医生需要对体表投影的指定区域进行操作的意图,医生通过向上或向下移动脚尖,脚尖沿第一弧面滑动,使脚尖触碰第一按键或第二按键,通过第一按键或第二按键输出医生的操作意图。
33.进一步地,所述方法应用在一种用于微创手术体表投影的调整装置上。
34.进一步地,所述的一种用于微创手术体表投影的调整装置包括:大腿垫板,小腿垫板、脚部垫板、底座、第一角度传感器和第二角度传感器。
35.面向微创手术体表投影调整方法的轴调整方法,包括以下步骤:步骤a、脚底面定位:在脚部定位时,所述第二固定件将设置在摆台下方的固定平面升起,固定平面与摆台的下表面接触,使摆台的上表面与脚部垫板的上表面平行,将脚底面定位,使脚底面与脚部垫板的上表面平行;步骤b、脚尖固定:在脚部定位时,脚尖夹板和脚跟夹板将脚部在长度方向上夹持后,第一固定件的固定头向第一腰形移动,固定头压紧第一腰形条上的滑套将滑套的位置固定,滑套通过摩擦力将医生脚尖在第一腰形条滑动面上的位置固定;步骤c、获取脚底面角度变化;医生小腿带动小腿垫板沿着小腿垫板与大腿垫板的
铰接轴在第一转动面内往复摆动,读取第一角度传感器的读数,定义第一角度传感器的读数中相邻的最大至与最小值之间为一个周期,选取一个周期,读取该周期内最大值a和最小值b,对比a和
‑
b的大小,若a>
‑
b,选取该周期内
‑
b至b段作为取样段,若a<
‑
b,选取该周期内a至
‑
a段作为取样段,读取摆台传感器的读数,并将摆台传感器的读数与第一角度传感器的读数按时间轴对应,截取取样段内摆台传感器的读数,从而获取取样段内脚底面相对于脚部垫板角度的变化值;步骤d、偏移方向判断:读取截取段的两个端点对应摆台传感器的读数c和d,读取c和d的正负号,并定义第一转动面内水平方向为水平轴、竖直方向为竖直轴,摆台的上表面与脚部垫板上表面平行时摆台传感器的读数为零,摆台在第一转动面内沿顺时针转动时摆台传感器输出负值,摆台在第一转动面内沿逆时针转动时摆台传感器输出正值,人体大腿和小腿转动的虚拟轴位于水平轴和竖直轴的交点,若c为正数、d为负数则认为虚拟轴位于铰接轴右侧,若c为负数、d为正数则认为虚拟轴位于铰接轴左侧,若c为正数、d为正数则认为虚拟轴位于铰接轴下方,若c为负数、d为负数则认定虚拟轴位于铰接轴上方;步骤e、铰接轴调整:设定一个长度量m,若c和d符号不同,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动;若c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,停止移动。
36.进一步地,所述步骤d中,通过在摆台上设置第三角度传感器进行检测,设定第三角度传感器在摆台上表面与脚部垫板上表面平行时输出值为零,摆台在第一转动面内沿顺时针转动时摆台传感器输出负值,摆台在第一转动面内沿逆时针转动时摆台传感器输出正值。
37.面向微创手术体表投影轴调整的脚底面角度获取方法,,医生小腿带动小腿垫板沿着小腿垫板与大腿垫板的铰接轴在第一转动面内往复摆动,读取第一角度传感器的读数,定义第一角度传感器的读数中相邻的最大至与最小值之间为一个周期,选取一个周期,读取该周期内最大值a和最小值b,对比a和
‑
b的大小,若a>
‑
b,选取该周期内
‑
b至b段作为取样段,若a<
‑
b,选取该周期内a至
‑
a段作为取样段,读取摆台传感器的读数,并将摆台传感器的读数与第一角度传感器的读数按时间轴对应,截取取样段内摆台传感器的读数,从而获取取样段内脚底面相对于脚部垫板角度的变化值;面向微创手术体表投影轴调整的偏移方向判断方法,读取截取段的两个端点对应摆台传感器的读数c和d,读取c和d的正负号,并定义第一转动面内水平方向为水平轴、竖直方向为竖直轴,摆台的上表面与脚部垫板上表面平行时摆台传感器的读数为零,摆台在第一转动面内沿顺时针转动时摆台传感器输出负值,摆台在第一转动面内沿逆时针转动时摆
台传感器输出正值,人体大腿和小腿转动的虚拟轴位于水平轴和竖直轴的交点,若c为正数、d为负数则认为虚拟轴位于铰接轴右侧,若c为负数、d为正数则认为虚拟轴位于铰接轴左侧,若c为正数、d为正数则认为虚拟轴位于铰接轴下方,若c为负数、d为负数则认定虚拟轴位于铰接轴上方;面向微创手术体表投影轴调整的铰接轴调整方法,步骤e、铰接轴调整:设定一个长度量m,若c和d符号不同,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动;若c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,停止移动。
38.本发明的有益效果为:1、本发明一种用于微创手术体表投影的调整装置,包括:大腿垫板,小腿垫板、脚部垫板、底座、第一角度传感器和第二角度传感器,所述底座的上端设置有支撑结构,支撑结构与大腿垫板连接,大腿垫板的一端与小腿垫板的上端铰接,小腿垫板的下端与脚部垫板转动连接,第一角度传感器设置在大腿垫板与小腿垫板的铰接处,所述第二角度传感器设置在小腿垫板与脚部垫板的转动连接处,由此结构,可以实现,在医生进行微创手术过程中,通过小腿带动小腿垫板转动,第一角度传感器获取第一转动角度信息,脚部转动带动脚部垫板转动,第二角度传感器获取第二转动角度信息,将两个角度信息作为坐标值,放置在坐标系内,可以将角度信息作为位置信息,该位置信息可以作为代表医生意图的指令对投影图像进行调整,在手术过程中,医生可以不需要助手辅助手持和调整,调整过程中只需移动小腿和脚部,大腿在大腿垫板上固定,不会对医生手部操作产生影响,影响手术连贯性,避免图像调整的过程对手术产生影响。
39.2、本发明设置的固定垫包括:变形管、平衡管、截止件和平衡袋,若干条变形管沿弧形布置,形成圆弧形的接触面,变形管内部填充有水,且每个变形管均通过一根平衡管与平衡袋连接,若干根平衡管均穿过截止件,截止件具有可移动的压紧面,用于将平衡管压紧;在大腿部放置在固定垫后,腿部对变形管挤压,变形管内的水通过平衡管挤压至平衡袋内,若干条变形管变形后,组成的圆弧形的接触面适应人体腿部形状后,通过截止件同时对若干条平衡管压紧,切断变形管与平衡袋的连通,圆弧形的接触面形状被固定,由于变形管具有弹性和适应腿部的形状,相对于普通弹性材料,能够在舒适的同时能够对腿部固定,具有更好的适应外形能力。
40.3、本发明的轴调整件,包括:轴驱动件、第一腰形条、第一固定件、第二腰形条、摆台和第二固定件,轴驱动件设置在大腿垫板上,第一腰形条和第二腰形条外侧均套接有滑套,第一腰形条的侧面设置有第一固定件,摆台铰接在脚部垫板上,摆台的上表面与人体脚底面保持接触,且摆台上设置有摆台传感器,第二固定件设置在脚部垫板上;由此结构,可
以实现通过第二固定件将摆台摆正,使脚部底面与脚部垫板上表面平行,作为起始位置,通过第一固定件使脚尖的位置固定,在第二固定件释放摆台后,由于小腿相对脚部垫板的运动,摆台摆动,由此可以判断,虚拟轴与铰接轴是否同轴,并以此为依据调整铰接轴的位置与虚拟轴同轴,使小腿摆动输入坐标信息时,小腿与小腿垫板能够同步,保证输入信息的准确。
41.4、本发明的投影调整方法,通过将医生的大腿固定,对小腿长度和脚部定位后,通过医生小腿的摆动获得纵坐标量,通过脚部的转动获取横坐标量,通过医生脚尖触碰按键获得医生的操作意图,整个调整过程不影响医生手部的手术操作,不需要助手的辅助手持,保持了手术的连贯性,避免医生需要调整投影时分神,提高手术效率。
42.5、本发明的轴调整方法,能够在医生大腿小腿和脚部与装置固定后,通过前后摆动小腿,通过截取一个摆动周期内,脚底面与脚部垫板角度的变化对腿部虚拟轴和铰接轴的位置进行判断,并自动调整铰接轴的位置,使铰接轴与虚拟轴的误差在允许范围内,调整过程简单自动,能够快速调整完成,节省调整时间,适应不同体态的医生。
附图说明
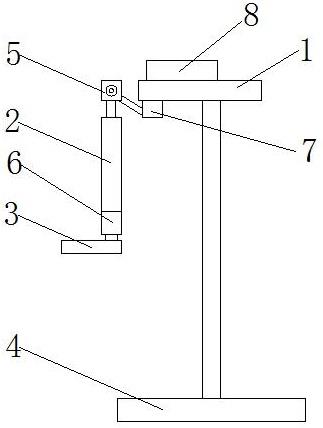
43.图1为一种用于微创手术体表投影的调整装置的整体结构示意图;图2为图1的细节结构示意图;图3为图2中的脚部垫板的结构示意图;图4为图2中的固定垫的结构示意图;图5为面向微创手术体表投影调整装置的轴调整件的结构示意图;图6为图5中的轴驱动件的结构示意图;图7为图5中的第二固定件的结构示意图;图8为实施例十四中取样段获得的示意图;图9为实施例十四中摆台角度示意图;图10为实施例十四中的结构简化图;图11为图10调整后的结构简化图;图中:1大腿垫板;2小腿垫板;3脚部垫板;4底座;5第一角度传感器;6第二角度传感器;7轴调整件;8固定垫;1
‑
1臀部支撑段;1
‑
2大腿支撑段;1
‑
3第一推杆;2
‑
1上连接段;2
‑
2下连接段;2
‑
3第二推杆;3
‑
1转台;3
‑
2脚尖夹板;3
‑
3脚跟夹板;3
‑
4第三推杆;3
‑
5第一弧面;3
‑
6第二弧面;3
‑
7第一按键;3
‑
8第二按键;4
‑
1移动板;4
‑
2固定板;4
‑
3底座弹簧;4
‑
4球轮;7
‑
1轴驱动件;7
‑
2第一腰形条;7
‑
3第一固定件;7
‑
4第二腰形条;7
‑
5摆台;7
‑
6第二固定件;8
‑
1变形管;8
‑
2平衡管;8
‑
3截止件;8
‑
4平衡袋;7
‑1‑
1轴固定叉;7
‑1‑
2第一轴驱动推杆;7
‑1‑
3第二轴驱动推杆;7
‑5‑
1摆台传感器;7
‑6‑
1固定筒;7
‑6‑
2固定筒滑槽;7
‑6‑
3固定筒推杆。
具体实施方式
44.以下将结合附图,对本发明进行详细说明:具体实施方式一本实施例公开的一种用于微创手术体表投影的调整装置,结合图1所示,包括:大
腿垫板1,小腿垫板2、脚部垫板3、底座4、第一角度传感器5和第二角度传感器6,所述底座4的上端设置有支撑结构,支撑结构为杆件,用于支撑,支撑结构与大腿垫板1连接,大腿垫板用于为医生大腿部提供支撑,大腿垫板1水平设置,小腿垫板2竖直设置,大腿垫板1的一端与所述小腿垫板2的上端铰接,铰接的可转动面为包含大腿垫板1和小腿垫板2长度方向的第一转动面,在医生将大腿部放在大腿垫板上后,小腿可以带动小腿垫板3向医生面前或后部摆动,所述小腿垫板2的下端与所述脚部垫板3转动连接,转动连接的转动面为垂直于所述小腿垫板2长度方向所在平面的第二转动面,且脚部垫板3与小腿垫板2垂直设置,所述第一角度传感器5设置在大腿垫板1与小腿垫板2的铰接处,用于检测所述小腿垫板2在第一转动面内相对于大腿垫板1转动的角度,所述第二角度传感器6设置在小腿垫板2与脚部垫板3的转动连接处,用于检测所述脚部垫板3在第二转动面内相对于小腿垫板2转动的角度;在医生进行微创手术过程中,通过体表投影将病人身体内部图像投影在患者体表,医生双手操作进行手术,在需要对投影的图像进行操作时,通过小腿带动小腿垫板3在第一转动面内转动,通过第一角度传感器5获取第一转动角度信息,通过脚部转动带动脚部垫板3在第二转动面内转动,通过第二角度传感器6获取第二转动角度信息,通过将第一角度信息和第二角度信息的角度值作为坐标值,放置在坐标系内,可以将角度信息作为位置信息,该位置信息可以作为代表医生意图的指令对投影图像进行调整,调整包括拖动、放大、缩小、亮度调整,在手术过程中,医生可以不需要助手辅助手持和调整,调整过程中只需移动小腿和脚部,大腿在大腿垫板1上固定,不会对医生手部操作产生影响,影响手术连贯性,避免图像调整的过程对手术产生影响,具体地,还包括轴调整件7,所述轴调整件7根据小腿垫板2沿上端铰接轴摆动时,人体脚部底面与脚部垫板3的表面角度的变化调整大腿垫板1和小腿垫板2的铰接轴在第一转动面上的位置,使铰接轴的轴线与人体大腿和小腿转动的虚拟轴线重合;由于不同医生腿部长短和粗细不同,腿部与装置固定后,大腿与小腿转动的虚拟轴和大腿垫板1与小腿垫板2的铰接轴不同轴,在虚拟轴和铰接轴不重合时,小腿随小腿垫板2转动过程中,小腿会相对于脚部垫板3产生沿小腿长度方向向上或向下的运动趋势,将脚部的脚尖处于脚部垫板3固定,脚底面距离脚部垫板3具有间隙,在小腿前后摆动过程中脚部底面相对于脚部垫板3的上表面角度会发生变化,根据角度变化规律判断虚拟轴和铰接轴的偏离情况,通过轴调整件7在摆动过程中进行调整;所述大腿垫板1的上表面设置有固定垫8,固定垫8能够适应大腿形状并将人体大腿与小腿连接的一端固定,固定方向为垂直于所述第一转动面的直线方向;现有的弹性垫,通过弹性变形适应人体形状,但弹性变形大的区域支撑力也大,由于弹性变形的特性导致现有弹性垫没有固定作用,采用固定垫8在适应人体变形后将形状固定,同时固定后具有一定的弹性,满足舒适的同时,对大腿部具有固定作用,避免用于调整的腿部运动传递至身体手部,影响微创手术中医生的操作。
45.具体实施方式二本实施例是在具体实施方式一的基础上,具体地,结合图2,所述大腿垫板1包括:臀部支撑段1
‑
1、大腿支撑段1
‑
2和第一推杆1
‑
3,所述臀部支撑段1
‑
1的支撑面水平设置,所述大腿支撑段1
‑
2的支撑面倾斜设置,且臀部支撑段1
‑
1的下端与所述支撑结构铰接连接,铰接连接的转动面与所述第一转动面平行,所述第一推杆1
‑
3的一端与支撑结构铰接连接,
第一推杆1
‑
3的另一端与所述大腿支撑段1
‑
2的下表面铰接连接;臀部支撑段1
‑
1对医生臀部进行支撑,大腿支撑段1
‑
2远离臀部支撑段1
‑
1的一端向下倾斜设置,在使用时,通过第一推杆1
‑
3推动大腿支撑段1
‑
2,使臀部支撑段1
‑
1和大腿支撑段1
‑
2沿着臀部支撑段1
‑
1下端的铰接轴转动,调整坐姿。
46.具体实施方式三本实施例是在具体实施方式一的基础上,具体地,结合图2所示,所述小腿垫板2包括:上连接段2
‑
1、下连接段2
‑
2和第二推杆2
‑
3,所述上连接段2
‑
1的下端通过沿上连接段2
‑
1长度方向设置的滑动结构与下连接段2
‑
2连接,下连接段2
‑
2的下端设置有与上连接段2
‑
1长度方向垂直的水平段,水平段上表面与所述脚部垫板3转动连接,所述第二推杆2
‑
3的一端与上连接段2
‑
1连接,第二推杆2
‑
3的另一端与下连接段2
‑
2连接;上连接段2
‑
1和下连接段2
‑
2通过滑动结构,使小腿垫板2能够调整长度,适应不同医生的小腿长度,保证脚部底面与脚部垫板3接触。
47.具体实施方式四本实施例是在具体实施方式一的基础上,具体地,结合图3所示,所述脚部垫板3包括:转台3
‑
1、脚尖夹板3
‑
2、脚跟夹板3
‑
3和第三推杆3
‑
4,所述转台3
‑
1与所述小腿垫板2转动连接,转台3
‑
1的两端相对分别设置有脚尖夹板3
‑
2和脚跟夹板3
‑
3,所述脚尖夹板3
‑
2通过滑动结构与转台3
‑
1连接,所述脚跟夹板3
‑
3与转台3
‑
1固定连接,所述第三推杆3
‑
4的一端与脚尖夹板3
‑
2连接,第三推杆3
‑
4的另一端与转台3
‑
1连接;在医生脚部踏在脚部垫板3上以后,第三推杆3
‑
4收缩,脚尖夹板3
‑
2和脚跟夹板3
‑
3将脚部沿长度方向夹紧固定,使脚部转动时,脚部垫板3能够随脚部转动;具体地,所述脚尖夹板3
‑
2的夹紧面上设置有第一弧面3
‑
5,所述脚跟夹板3
‑
3的夹紧面上设置有第二弧面3
‑
6,第一弧面3
‑
5和第二弧面3
‑
6的圆心重合,且圆心位于人体脚部相对于小腿在第一转动面内转动的轴线上;第一弧面3
‑
5和第二弧面3
‑
6上可以设置沿纵向的凸起条,一方面增加脚部与弧面在第二转动面上转动的摩擦力,一方面减小脚部与弧面在第一转动面上的摩擦力;具体地,所述脚部垫板3还包括:第一按键3
‑
7和第二按键3
‑
8,所述第一按键3
‑
7设置在转台3
‑
1上表面靠近所述脚尖夹板3
‑
2的一端,所述第二按键3
‑
8设置在脚尖夹板3
‑
2上端向转台3
‑
1方向延伸的固定块下表面;使脚部不仅可以带动脚部垫板3输出转动量,还可以向上或向下滑动脚尖,触碰第一按键3
‑
7或第二按键3
‑
8,通过第一按键3
‑
7和第二按键3
‑
8输出医生不同的操作意图,对投影图像进行调整。
48.具体实施方式五本实施例是在具体实施方式一的基础上,具体地,结合图2所示,所述底座4包括:移动板4
‑
1、固定板4
‑
2、底座弹簧4
‑
3和球轮4
‑
4,所述固定板4
‑
2的上端与所述支撑结构连接,固定板4
‑
2的下端沿竖直方向设置有容纳移动板4
‑
1的移动滑槽,固定板4
‑
2的下表面移动滑槽外侧的环形面为用于支撑的固定平面,所述底座弹簧4
‑
3设置在移动板4
‑
1与固定板4
‑
2之间,所述移动板4
‑
1的下表面设置有若干个球轮4
‑
4,若干个球轮4
‑
4形成的滑动接触面形成用于移动的滑动面;在医生需要移动位置时,通过未抬起的腿支撑底面,减小身体对装置的压力,装置的上部在底座弹簧4
‑
3的支撑下抬起,固定板4
‑
2的下沿与地面脱离接触,医生的支撑腿与地面支撑,移动板4
‑
1底部的球轮4
‑
4转动,装置向需要移动的地方滑动,在
移动后,医生的腿部减小对身体的支撑,身体对装置的压力增加,使固定板4
‑
2向地面移动,固定板4
‑
2的下表面与地面接触,装置被固定。
49.具体实施方式六本实施例公开的面向微创手术体表投影调整装置的固定垫,所述固定垫应用在一种用于微创手术体表投影的调整装置上,用于适应大腿形状并将人体大腿与小腿连接的一端固定,固定方向为垂直于所述第一转动面的直线方向;具体地,结合图4所示,包括:变形管8
‑
1、平衡管8
‑
2、截止件8
‑
3和平衡袋8
‑
4,若干条变形管8
‑
1沿弧形布置,形成圆弧形的接触面,变形管8
‑
1内部填充有水,且每个变形管8
‑
1均通过一根平衡管8
‑
2与平衡袋8
‑
4连接,若干根平衡管8
‑
2均穿过截止件8
‑
3,截止件8
‑
3具有可移动的压紧面,用于将平衡管8
‑
2压紧;在大腿部放置在固定垫后,腿部对变形管8
‑
1挤压,变形管8
‑
1内的水通过平衡管8
‑
2挤压至平衡袋8
‑
4内,若干条变形管8
‑
1变形后,组成的圆弧形的接触面适应人体腿部形状后,通过截止件8
‑
3同时对若干条平衡管压紧,切断变形管8
‑
1与平衡袋8
‑
4的连通,圆弧形的接触面形状被固定,由于变形管8
‑
1具有弹性和适应腿部的形状,相对于普通弹性材料,能够在舒适的同时能够对腿部固定,具有更好的适应外形能力。
50.具体实施方式七本实施例公开的面向微创手术体表投影调整装置的轴调整件,所述调整件应用在一种用于微创手术体表投影的调整装置上,用于根据小腿垫板2沿上端铰接轴摆动时,人体脚部底面与脚部垫板3的表面角度的变化调整大腿垫板1和小腿垫板2的铰接轴在第一转动面上的位置,使铰接轴的轴线与人体大腿和小腿转动的虚拟轴线重合;具体地,结合图5所示,包括:轴驱动件7
‑
1、第一腰形条7
‑
2、第一固定件7
‑
3、第二腰形条7
‑
4、摆台7
‑
5和第二固定件7
‑
6,所述轴驱动件7
‑
1设置在大腿垫板1上,用于调整大腿垫板1和小腿垫板2的铰接轴在第一转动面上的位置,所述第一腰形条7
‑
2固定在脚尖夹板3
‑
2上,第二腰形条7
‑
4固定在脚跟夹板3
‑
3上,且第一腰形条7
‑
2和第二腰形条7
‑
4外侧均套接有滑套,滑套上设置有用于滑套复位的弹簧结构,所述第一腰形条7
‑
2的侧面设置有第一固定件7
‑
3,第一固定件7
‑
3具有可移动的固定头,固定头能够压紧第一腰形条上的滑套将滑套的位置固定,所述摆台7
‑
5铰接在脚部垫板3的上表面,且铰接轴位于人体脚部相对于小腿在第一转动面内转动的轴线下方,所述摆台7
‑
5的上表面与人体脚底面保持接触,摆台7
‑
5能够朝向脚尖夹板3
‑
2或脚跟夹板3
‑
3摆动,且摆台7
‑
5上设置有摆台传感器7
‑5‑
1用于检测摆台7
‑
5朝向脚尖夹板3
‑
2或脚跟夹板3
‑
3的摆动幅度,所述第二固定件7
‑
6设置在脚部垫板3上,第二固定件7
‑
6具有位于所述摆台7
‑
5下方的固定平面,固定平面在所述摆台7
‑
5两个摆动端下方具有距离脚部垫板3上表面高度相同的固定面,且固定平面能够沿垂直于脚部垫板3表面的方向移动;通过第二固定件7
‑
6将摆台摆正,使落在摆台7
‑
5上的脚部底面与脚部垫板3上表面平行,作为起始位置,通过第一固定件7
‑
3将第一腰形条7
‑
2表面的滑套固定,使脚尖与脚尖夹板3
‑
2的位置固定,在小腿带动小腿垫板2前后摆动时,脚尖位置被固定,由于人体大腿与小腿连接的虚拟轴与大腿垫板1和小腿垫板2的铰接轴不同轴,在前后摆动时,人体腿部会相对于脚部垫板3沿小腿长度方向上有运动趋势,在第二固定件7
‑
6释放摆台7
‑
5后,前后摆动时,由于小腿相对脚部垫板3的运动,使脚跟部在第二腰形条7
‑
4表面滑动,进而带动摆台7
‑
5摆动,若虚拟轴与铰接轴同轴,摆台7
‑
5不会摆动,由此可以判断,
虚拟轴与铰接轴是否同轴,并以此为依据调整铰接轴的位置与虚拟轴同轴;具体地,结合图6所示,所述轴驱动件7
‑
1包括:轴固定叉7
‑1‑
1、第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3,所述轴固定叉7
‑1‑
1的上端两个叉端上均与一个铰接耳的上端铰接,两个铰接耳的下端均固定在小腿垫板2上,所述轴固定叉7
‑1‑
1的下端与第一轴驱动推杆7
‑1‑
2的一端固定连接,第一轴驱动推杆7
‑1‑
2的另一端与第二轴驱动推杆7
‑1‑
3的一端固定连接,第二轴驱动推杆7
‑1‑
3的另一端固定在大腿垫板1上,且第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3垂直设置;在调整铰接轴位置时,通过调整第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3的伸出长度,调整轴固定叉7
‑1‑
1的位置,带动铰接轴移动;具体地,结合图7所示,所述第二固定件7
‑
6包括:固定筒7
‑6‑
1、固定筒滑槽7
‑6‑
2和固定筒推杆7
‑6‑
3,所述固定筒7
‑6‑
1的轴线垂直于脚部垫板3的上表面设置在摆台7
‑
5的下方,固定筒滑槽7
‑6‑
2设置在脚部垫板3上对固定筒7
‑6‑
1沿垂直于脚部垫板3的方向滑动进行导向,固定筒7
‑6‑
1的侧面与固定筒推杆7
‑6‑
3的一端连接,固定筒推杆7
‑6‑
3的另一端固定在脚部垫板3上;在对摆台7
‑
5固定时,固定筒推杆7
‑6‑
3拉动固定筒7
‑6‑
1沿固定筒滑槽7
‑6‑
2向上滑动至摆台7
‑
5下表面,并与摆台7
‑
5下表面留有间隙,脚部将摆台7
‑
5下压,摆台7
‑
5通过沿垂直于脚部垫板3表面的垂直方向滑道向下滑动,摆台7
‑
5下端的弹性件被压缩,同时摆台7
‑
5的下表面移动至固定筒7
‑6‑
1的上表面接触,完成脚底面与脚部垫板3平行的定位,摆台7
‑
5下端采用弹性件支撑,可以保持脚底部在摆动过程中与摆台7
‑
5上表面始终接触;具体地,所述摆台传感器7
‑5‑
1为第三角度传感器,第三角度传感器的一端与摆台7
‑
5连接,第三角度传感器的另一端固定在脚部垫板3上;通过第三角度传感器检测摆台铰接轴相对于脚部垫板3表面的转动幅度,作为摆台7
‑
5的摆动幅度;具体地,所述摆台传感器7
‑5‑
1包括两个距离传感器,两个距离传感器分别设置在摆台7
‑
5两个摆动端的下方,通过两个距离传感器直接检测摆台7
‑
5的两个摆动端相对于一个平行于脚部垫板3上表面的固定端的平面的距离值,作为摆台7
‑
5的摆动幅度。
51.具体实施方式八本实施例公开的面向微创手术体表投影轴调整件的轴驱动件,所述的轴驱动件用于面向微创手术体表投影调整装置的轴调整件上,用于调整大腿垫板1和小腿垫板2的铰接轴在第一转动面上的位置,使铰接轴的轴线与人体大腿和小腿转动的虚拟轴线重合;所述轴驱动件7
‑
1包括:轴固定叉7
‑1‑
1、第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3,所述轴固定叉7
‑1‑
1的上端两个叉端上均与一个铰接耳的上端铰接,两个铰接耳的下端均固定在小腿垫板2上,所述轴固定叉7
‑1‑
1的下端与第一轴驱动推杆7
‑1‑
2的一端固定连接,第一轴驱动推杆7
‑1‑
2的另一端与第二轴驱动推杆7
‑1‑
3的一端固定连接,第二轴驱动推杆7
‑1‑
3的另一端固定在大腿垫板1上,且第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3垂直设置,在调整铰接轴位置时,通过调整第一轴驱动推杆7
‑1‑
2和第二轴驱动推杆7
‑1‑
3的伸出长度,调整轴固定叉7
‑1‑
1的位置,带动铰接轴移动。
52.具体实施方式九本实施例公开的面向微创手术体表投影轴调整件的第二固定件,所述的第二固定件用于面向微创手术体表投影调整装置的轴调整件上,用于摆台7
‑
5初始位置的定位;其特征在于,所述第二固定件7
‑
6包括:固定筒7
‑6‑
1、固定筒滑槽7
‑6‑
2和固定筒
推杆7
‑6‑
3,所述固定筒7
‑6‑
1的轴线垂直于脚部垫板3的上表面设置在摆台7
‑
5的下方,固定筒滑槽7
‑6‑
2设置在脚部垫板3上对固定筒7
‑6‑
1沿垂直于脚部垫板3的方向滑动进行导向,固定筒7
‑6‑
1的侧面与固定筒推杆7
‑6‑
3的一端连接,固定筒推杆7
‑6‑
3的另一端固定在脚部垫板3上;在对摆台7
‑
5固定时,固定筒推杆7
‑6‑
3拉动固定筒7
‑6‑
1沿固定筒滑槽7
‑6‑
2向上滑动至摆台7
‑
5下表面,并与摆台7
‑
5下表面留有间隙,脚部将摆台7
‑
5下压,摆台7
‑
5通过沿垂直于脚部垫板3表面的垂直方向滑道向下滑动,摆台7
‑
5下端的弹性件被压缩,同时摆台7
‑
5的下表面移动至固定筒7
‑6‑
1的上表面接触,完成脚底面与脚部垫板3平行的定位,摆台7
‑
5下端采用弹性件支撑,可以保持脚底部在摆动过程中与摆台7
‑
5上表面始终接触;具体实施方式十本实施例公开的一种用于微创手术体表投影的调整方法,所述方法应用在具体实施方式一、二、三、四或五公开的一种用于微创手术体表投影的调整装置上,用于医生在不中断手术的情况下,对体表投影进行调整,便于医生观察;具体地,包括以下步骤:步骤a、大腿固定:主刀医生以一条腿抬起的站立姿势,臀部坐在臀部支撑段1
‑
1上,已抬起的腿部大腿沿大腿支撑段1
‑
2长度方向放置在大腿支撑段1
‑
2上,使医生的大腿与大腿垫板1的位置固定;从而将小腿与脚部的运动与身体上部隔离,避免在调整过程中影响医生的手术操作;步骤b、小腿长度定位:医生抬起的那条腿的小腿自然下垂,第二推杆2
‑
3收缩,小腿垫板2的下连接段2
‑
2向上连接段2
‑
1移动,使小腿垫板2的长度变短带动脚部垫板3向上移动,直至脚底面与脚部垫板3接触,使小腿垫板3根据医生小腿长度定位;步骤c、脚部定位:第三推杆3
‑
4拉动脚尖夹板3
‑
2向脚尖移动,脚尖夹板3
‑
2和脚跟夹板3
‑
3将脚部在长度方向上夹持;使脚部与脚部垫板3固定;步骤d、纵坐标量获取:在医生需要输入纵坐标量时,通过向前或向后摆动小腿,小腿带动小腿垫板2以小腿垫板2和大腿垫板1的铰接轴为轴在第一转动面内摆动,通过第一角度传感器5获取小腿垫板2摆动的幅度,将小腿垫板2的摆动幅度作为纵坐标量进行获取;步骤e、横坐标量获取:在医生需要输入横坐标量时,通过向左或向右扭动脚部,脚部带动脚部垫板3以脚部垫板3和小腿垫板2转动连接的转轴为轴在第二转动面内摆动,通过第二角度传感器6获取脚部垫板3摆动的幅度,将脚部垫板3的摆动幅度作为横坐标量进行获取;步骤f、操作意图获取:在医生需要对体表投影的指定区域进行操作时,通过向上或向下移动脚尖,脚尖沿第一弧面3
‑
5滑动,使脚尖触碰第一按键3
‑
7或第二按键3
‑
8,通过第一按键3
‑
7或第二按键3
‑
8获取医生的操作意图;通过获得医生意图的横坐标和纵坐标值,来对应体表投影的位置,在医生输入横纵坐标值后,能够选定投影需要放大的区域,便于医生观察,不需要助手辅助手持,影响手术连贯性;具体地,还包括铰接轴位置调整步骤,在脚部定位后,调整大腿垫板1和小腿垫板2铰接轴在第一转动面内的位置,使铰接轴与医生大腿和小腿转动的虚拟轴重合。
53.具体地,所述步骤a中进行大腿固定时,通过固定垫8适应大腿形状并将医生大腿与小腿连接的一端固定,固定方向为垂直于第一转动面的直线方向。
54.具体实施方式十一本实施例公开的面向微创手术体表投影调整方法的纵坐标量输出方法,所述方法应用在一种用于微创手术体表投影的调整方法上,用于将代表医生意图的纵坐标值进行输出;具体地,设定一个小腿垫板2的长度方向与竖直方向的夹角为纵坐标零点,设定第一角度传感器5在小腿垫板2处于设定的纵坐标零点位置时输出值为零,在医生需要输入纵坐标量时,通过向前或向后摆动小腿,小腿带动小腿垫板2以小腿垫板2和大腿垫板1的铰接轴为轴在第一转动面内摆动,通过第一角度传感器5获取小腿垫板2摆动的幅度,并将小腿垫板2的摆动幅度对应的数值作为纵坐标量进行输出。
55.具体实施方式十二本实施例公开的面向微创手术体表投影调整方法的横坐标量输出方法,所述方法应用在一种用于微创手术体表投影的调整方法上,用于将代表医生意图的横坐标值进行输出;设定一个脚部垫板3的脚尖夹板3
‑
2与脚跟夹板3
‑
3的连线与第一转动面的夹角为横坐标零点,设定第二角度传感器6在脚部垫板3处于设定的横坐标零点位置时输出值为零,在医生需要输入横坐标量时,通过向左或向右扭动脚部,脚部带动脚部垫板3以脚部垫板3和小腿垫板2转动连接的转轴为轴在第二转动面内摆动,通过第二角度传感器6获取脚部垫板3摆动的幅度,并将脚部垫板3的摆动幅度对应的数值作为横坐标量进行输出。
56.具体实施方式十三本实施例公开的面向微创手术体表投影调整方法的操作意图输出方法,所述方法应用在一种用于微创手术体表投影的调整方法上,用于将医生对体表投影的操作意图的进行输出;在医生脚尖向上翘起或向下踩踏时,脚尖沿第一弧面3
‑
5滑动路径能够触及的位置分布设置第一按键3
‑
7和第二按键3
‑
8,分别设定第一按键3
‑
7和第二按键3
‑
8对应一种医生需要对体表投影的指定区域进行操作的意图,医生通过向上或向下移动脚尖,脚尖沿第一弧面3
‑
5滑动,使脚尖触碰第一按键3
‑
7或第二按键3
‑
8,通过第一按键3
‑
7或第二按键3
‑
8输出医生的操作意图。
57.具体实施方式十四本实施例公开的面向微创手术体表投影调整方法的轴调整方法,所述方法应用在具体实施方式十公开的一种用于微创手术体表投影的调整方法上,用于根据小腿垫板2沿上端铰接轴摆动时,人体脚部底面与脚部垫板3的表面角度的变化调整大腿垫板1和小腿垫板2的铰接轴在第一转动面上的位置,使铰接轴的轴线与人体大腿和小腿转动的虚拟轴线重合;具体地,包括以下步骤:步骤a、脚底面定位:在脚部定位时,所述第二固定件7
‑
6将设置在摆台7
‑
5下方的固定平面升起,固定平面与摆台7
‑
5的下表面接触,使摆台7
‑
5的上表面与脚部垫板3的上表面平行,将脚底面定位,使脚底面与脚部垫板3的上表面平行;步骤b、脚尖固定:在脚部定位时,脚尖夹板3
‑
2和脚跟夹板3
‑
3将脚部在长度方向上夹持后,第一固定件7
‑
3的固定头向第一腰形7
‑
2移动,固定头压紧第一腰形条7
‑
2上的滑
套将滑套的位置固定,滑套通过摩擦力将医生脚尖在第一腰形条7
‑
2滑动面上的位置固定;步骤c、获取脚底面角度变化;结合图8所示,医生小腿带动小腿垫板2沿着小腿垫板2与大腿垫板1的铰接轴在第一转动面内往复摆动,读取第一角度传感器5的读数,定义第一角度传感器5的读数中相邻的最大至与最小值之间为一个周期,选取一个周期,读取该周期内最大值a和最小值b,对比a和
‑
b的大小,若a>
‑
b,选取该周期内
‑
b至b段作为取样段,若a<
‑
b,选取该周期内a至
‑
a段作为取样段,读取摆台传感器7
‑5‑
1的读数,并将摆台传感器7
‑5‑
1的读数与第一角度传感器5的读数按时间轴对应,截取取样段内摆台传感器7
‑5‑
1的读数,从而获取取样段内脚底面相对于脚部垫板3角度的变化值;步骤d、偏移方向判断:读取截取段的两个端点对应摆台传感器7
‑5‑
1的读数c和d,读取c和d的正负号,并定义第一转动面内水平方向为水平轴、竖直方向为竖直轴,摆台7
‑
5的上表面与脚部垫板3上表面平行时摆台传感器7
‑5‑
1的读数为零,摆台7
‑
5在第一转动面内沿顺时针转动时摆台传感器7
‑5‑
1输出负值,摆台7
‑
5在第一转动面内沿逆时针转动时摆台传感器7
‑5‑
1输出正值,人体大腿和小腿转动的虚拟轴位于水平轴和竖直轴的交点,若c为正数、d为负数则认为虚拟轴位于铰接轴右侧,若c为负数、d为正数则认为虚拟轴位于铰接轴左侧,若c为正数、d为正数则认为虚拟轴位于铰接轴下方,若c为负数、d为负数则认定虚拟轴位于铰接轴上方;结合图8和图9所示,当人体腿部的虚拟轴位于铰接轴左侧时,向前摆动腿部时,第一角度传感器5输出正值,由于虚拟轴与铰接轴不同轴,人体小腿具有沿小腿长度方向向下的运动趋势,由于脚尖被固定,脚底面带动摆台相对于脚部垫板3上表面沿顺时针方向偏转,此时摆台传感器输出负值,当人体腿部向后摆动时,第一角度传感器输出正值,人体小腿具有沿小腿长度方向向上的运动趋势,由于脚尖被固定,脚底面带动摆台相对于脚部垫板3上表面沿逆时针方向偏转,此时摆台传感器输出正值;步骤e、铰接轴调整:设定一个长度量m,若c和d符号不同,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动;若c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,停止移动;结合图10和图11所示,忽略脚部长度,小腿简化为线段e、小腿垫板简化为线段f,小腿线段e的轨迹在竖直线左侧时位于垫板线f外侧,使c为负数、小腿线段e的轨迹在竖直线右侧时位于垫板线f外侧,使d为正数,判断为虚拟轴位于铰接轴左侧,将铰接轴向左移动一个m值,此时在一个周期内,c为负数、d为正数,判断为虚拟轴仍然位于铰接轴左侧,继续将铰接轴向左移动一个m值,直至,c变成正数、d变成辅助,判断为虚拟轴位于铰接右侧,此时虚拟轴与铰接轴在水平方向上的距离值小于一个m值,次时将m值减小为0.5m值,继续移动,若c、d未变号则继续移动,若c、d变号则继续减小移动量,直至c、d同号,此时对虚拟轴和
铰接轴进行高度方向的调整,此时小腿线段e的轨迹在垫板线f外侧,使c、d均为正数,判断虚拟轴位于铰接轴上方,将铰接轴向上移动一个m值,使小腿垫板的长度增加一个m值,若c、d仍然同号,继续在竖直方向上移动,若c、d异号,转入水平方向调整,设定一个阈值n,在将m值减小到小于n时,认为虚拟轴和铰接轴的误差在允许范围内,停止调整;具体地,所述步骤d中,通过在摆台7
‑
5上设置第三角度传感器进行检测,设定第三角度传感器在摆台7
‑
5上表面与脚部垫板3上表面平行时输出值为零,摆台7
‑
5在第一转动面内沿顺时针转动时摆台传感器7
‑5‑
1输出负值,摆台7
‑
5在第一转动面内沿逆时针转动时摆台传感器7
‑5‑
1输出正值。
58.具体实施方式十五本实施例公开的面向微创手术体表投影轴调整的脚底面角度获取方法,所述方法应用在具体实施方式十四公开的面向微创手术体表投影调整方法的轴调整方法上;具体地,医生小腿带动小腿垫板2沿着小腿垫板2与大腿垫板1的铰接轴在第一转动面内往复摆动,读取第一角度传感器5的读数,定义第一角度传感器5的读数中相邻的最大至与最小值之间为一个周期,选取一个周期,读取该周期内最大值a和最小值b,对比a和
‑
b的大小,若a>
‑
b,选取该周期内
‑
b至b段作为取样段,若a<
‑
b,选取该周期内a至
‑
a段作为取样段,读取摆台传感器7
‑5‑
1的读数,并将摆台传感器7
‑5‑
1的读数与第一角度传感器5的读数按时间轴对应,截取取样段内摆台传感器7
‑5‑
1的读数,从而获取取样段内脚底面相对于脚部垫板3角度的变化值。
59.具体实施方式十六本实施例公开的面向微创手术体表投影轴调整的偏移方向判断方法,所述方法应用在具体实施方式十四公开的面向微创手术体表投影调整方法的轴调整方法上;具体地,读取截取段的两个端点对应摆台传感器7
‑5‑
1的读数c和d,读取c和d的正负号,并定义第一转动面内水平方向为水平轴、竖直方向为竖直轴,摆台7
‑
5的上表面与脚部垫板3上表面平行时摆台传感器7
‑5‑
1的读数为零,摆台7
‑
5在第一转动面内沿顺时针转动时摆台传感器7
‑5‑
1输出负值,摆台7
‑
5在第一转动面内沿逆时针转动时摆台传感器7
‑5‑
1输出正值,人体大腿和小腿转动的虚拟轴位于水平轴和竖直轴的交点,若c为正数、d为负数则认为虚拟轴位于铰接轴右侧,若c为负数、d为正数则认为虚拟轴位于铰接轴左侧,若c为正数、d为正数则认为虚拟轴位于铰接轴下方,若c为负数、d为负数则认定虚拟轴位于铰接轴上方;具体实施方式十七本实施例公开的面向微创手术体表投影轴调整的铰接轴调整方法,所述方法应用在具体实施方式十四公开的面向微创手术体表投影调整方法的轴调整方法上;具体地,步骤e、铰接轴调整:设定一个长度量m,若c和d符号不同,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动;若c和d符号相同,将铰接轴沿竖直轴移动一个m长度,若c为正数、d为正数则将铰
接轴向下方移动,若c为负数、d为负数则将铰接轴向上方移动,重复步骤d直至c和d符号不同,停止移动,将铰接轴沿水平轴移动一个m长度,若c为正数、d为负数则将铰接轴向右侧移动,若c为负数、d为正数则将铰接轴左侧移动,重复步骤d,若c和d均未变号,继续移动一个长度m,直至c和d发生变号,若c和d均变号,移动0.5m长度,直至c和d符号相同,停止移动。
60.以上实施例只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1