一种血管内前视探测装置的制作方法
1.本发明涉及医疗器械技术领域,尤其是一种血管内前视探测装置。
背景技术:
2.慢性完全闭塞(cto)病变手术成功率较低,在早期其手术成功率仅为48
‑
76%。手术失败的原因中,导引钢丝无法通过闭塞病变占绝大多数原因(63
‑
92%)。在钝头闭塞病变前,如果没有较粗大的分支,不能应用目前临床所用ivus设备提供帮助时,为了提高手术成功率,医生通过应用头端较硬、支撑力和操控性更好的新型导引钢丝和锥形头端导引钢丝,但是这样就很难通过导丝遇到的阻力以及头端运动的灵活程度来判断导丝远端是否位于真腔,如果判断错误,导丝所致的冠脉穿孔或破裂是导致cto并发症的最常见原因。具体来讲:目前术中应用ivus指导cto的介入治疗存在着一定的局限性。因为ivus导管的远端位于成像元件远端大约10.5至23mm处,需要相对较长的血管空间,目前临床应用的ivus探头只能侧视而不能前视,只有将探头伸到闭塞部位侧面(分支血管)后通过回撤或前送导管才能够成像并寻找闭塞病变入口位置。当遇到残端模糊的cto病变时,因它形成于当冠状动脉斑块急性破裂后,血小板首先在斑块破裂处聚集并阻塞血管,之后血栓逐渐向病变血管近段延伸,最后终止于分支血管分叉开口处,由此形成残端模糊的cto病变。这类病变仅仅通过双侧造影进行残端模糊的cto
‑
pci手术治疗,造影图像可能无法准确地定位cto病变入口残端,穿刺导丝缺乏着力点,并且研究发现大约有96%的慢性完全闭塞病变中存在钙化,其中约68%只是少量的钙质,而造影发现钙化的比例约61%。大多数闭塞病变存在近端纤维帽,但只有约50%在远端存在纤维帽。在cto的介入治疗过程中导丝很容易进入到比较软的内膜下和中膜的位置,大约34%会出现壁内血肿,同时若钙化过于严重时导丝进入内膜下几率会相对增加。因此导丝容易滑入分支血管内或进入假腔,使该类手术更具困难。为了提高手术成功率,医生通过应用头端较硬、支撑力和操控性更好的新型导引钢丝和锥形头端导引钢丝,但是这样就很难通过导丝遇到的阻力以及头端运动的灵活程度来判断导丝远端是否位于真腔,如果判断错误,导丝所致的冠脉穿孔或破裂是导致cto最严重并发症的常见原因。如果应用头端成像超声,就能够实时指导血管真腔位置,并能够沿着血管真腔指导导丝前进方向,减少术中并发症。为了准确定位残端模糊cto的残端位置,医生利用血管内超声来帮助术者完成该类手术。但如果闭塞血管周围边支血管直径小于ivus导管直径那便不适用该法,并且如果闭塞病变周围无边支血管该法也不能成功。其次,目前ivus导管无法提供有关闭塞远端血管的信息,仍需要依靠双侧冠状动脉造影来观察闭塞远端的侧支循环血管。另外,在cto合并钙化病变中,这种病变能够阻挡血管内超声对在闭塞断端的判断,干扰对血管真腔的识别和判断。
3.同时,冠状动脉穿孔是cto病变pci术中最常见且严重的并发症,发生率在0.29%~0.93%。pci术中导丝引起冠状动脉破裂最为多见,一种情况见于硬导丝进入假腔引起冠状动脉破裂,另一种情况是由于硬导丝通过cto病变后引起远端小分支破裂,可引起迟发性心脏压塞,造成严重后果。目前cto病变专用导丝(conquest/conquest pro系列、cross it
系列等)通过病变能力极强,很难根据导丝遇到阻力和头端运动灵活程度判断导丝远端是否位于真腔。如判断错误,误用球囊通过或扩张,常引起严重冠状动脉破裂。
技术实现要素:
4.本发明所要解决的技术问题在于提供一种血管内前视探头。
5.为解决上述技术问题,本发明的技术方案是:
6.一种血管内前视探测装置,包括血管内前视探头(20
‑
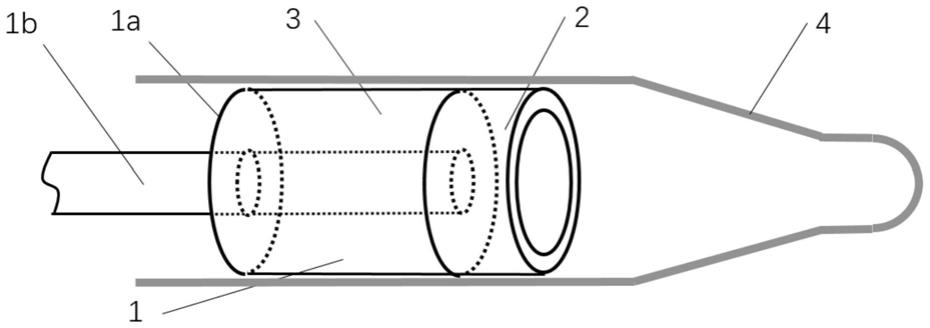
60mhz),所述血管内前视探头包括外壳(1a)、cmut超声传感器阵列(2)(即基于电容式超声微阵列传感器)、采集控制芯片(3)和带电缆柔性轴(1b),所述外売(1a)为中空圆柱形结构,所述cmut超声传感器阵列(2)和采集控制芯片(3)嵌于外壳(1a)内,并整体与所述带电缆柔性轴(1b)固定连接,并随带电缆柔性轴(1b)一起前后移动。
7.优选的,上述血管内前视探测装置,所述cmut超声传感器阵列(2)包括若干独立电路的振动元件超声单元,所述振动元件超声单元由若干薄膜振动元件(2b)组成,所述薄膜振动元件(2b)使用cmut薄膜结构,包括依次连接的上电极(21)、振膜(22)、空腔(23)及带电极衬底(24),并通过电极(21)和采集控制芯片(3)连接。
8.优选的,上述血管内前视探测装置,所述薄膜振动元件(2b)的形状可以为圆形或者方形,可以相同或者不同。
9.优选的,上述血管内前视探测装置,所述该cmut超声传感器阵列的封装尺寸为0.5
‑
2mm。
10.优选的,上述血管内前视探测装置,所述采集控制芯片(3)包括脉冲信号发生器、带多路复用器的收/发控制开关、高速模拟前端(用于放大、滤波、模数转换)和控制芯片,所述脉冲信号发生器、收/发控制开关、高速模拟前端和控制芯片依次循环线路连接,所述收/发控制开关与cmut超声传感器阵列(2)线路连接。
11.优选的,上述血管内前视探测装置,还包括介入导管(4),所述血管内前视探头置于该介入导管内,所述带电缆柔性轴(1b)与电机线路连接,血管内前视探头通过电机带动带电缆柔性轴(1b),利用带电缆柔性轴(1b)的移动实现血管内前视探头在介入导管内前后滑动探测及自动回撤。
12.优选的,上述血管内前视探测装置,所述介入导管(4)的外径为0.5
‑
3mm。
13.优选的,上述血管内前视探测装置,所述介入导管(4)为ivus导管。
14.优选的,上述血管内前视探测装置,还包括上位机(即具有相应的数字信号及图像处理的计算机),所述上位机通过电缆连接采集控制芯片(3)的控制芯片以及电机,该上位机与控制芯片进行信息交互传输并对电机进行实时控制。
15.优选的,上述血管内前视探测装置,所述外売(1a)的材质为铜或其他金属材料。
16.有益效果:
17.上述血管内前视探测装置,其血管内前视探头包含一组前视的cmut超声传感器阵列,可以实现高分辨率、大扫描角度的前视超声成像。其临床意义在于能够在导管头端的远端进行前向成像,从而无需导管先进入侧支来推进或回撤导管,它可以实时观察导丝在冠脉中的准确位置,并能够引导假腔中的导丝再次进入真腔内,在一些齐头闭塞的病变中,它可以提供明确的cto入口信息,可以可视化观测闭塞血管近端的病变,并在pci时提供闭塞
血管的实时路线图。通过血管内前视探头提供的信息,充分了解导丝在血管内走形方向及位置,确定血管腔走形方向,为导丝的术中操作提供充分信息。
18.无论是前向或逆向途径开通cto病变,导丝技术均是其核心,导丝从近端血管真腔穿过cto闭塞段斑块组织进入远端血管真腔,是介入开通cto的理想目标。虽然导丝进入内膜下或“假腔”,再从“假腔”进入血管真腔(包括adr和reverse cart)可以开通闭塞血管,但导丝在内膜下或“假腔”内穿行后,若导丝从内膜下穿刺到中膜或外膜下,则有并发冠状动脉穿孔甚至心脏压塞的可能,因此,本申请利用血管内前视探头独特影像优势,能够随时追踪导丝走形方向及位置,减少术中导丝的盲目走形,随时指导导丝在管腔真腔内或者必要时从假腔重回血管真腔的操作,从而提高cto病变手术成功率,降低术中血管穿孔、夹层等的发生,缩短手术时长,减少x线辐射量,也可以显著减少术中造影剂用量,从而减少造影剂肾病的发生。
附图说明
19.图1为本发明所述血管内前视探测装置的结构示意图;
20.图2为本发明所述血管内前视探测装置的线路控制图;
21.图3为本发明所述血管内前视探测装置的cmut超声传感器阵列的结构示意图,包括振动元件超声单元的局部放大图以及单个薄膜振动元件(黑色小圈部分)的示意图;
22.图4为本发明所述血管内前视探测装置的cmut超声传感器阵列的三种导管cmut阵列及封装外壳外形组合示意图。
23.图中,1
‑
血管内前视探头 1a
‑
外壳 1b
‑
带电缆柔性轴
[0024]2‑
cmut超声传感器阵列 3
‑
采集控制芯片 4
‑
介入导管
[0025]
2a
‑
振动元件超声单元 2b
‑
薄膜振动元件 21
‑
上电极
[0026]
22
‑
振膜 23
‑
空腔 24
‑
带电极衬底
具体实施方式
[0027]
实施例1
[0028]
如图1
‑
4所示,所述血管内前视探测装置,包括血管内前视探头1(20
‑
60mhz),所述血管内前视探头1包括外壳1a、cmut超声传感器阵列2(即基于电容式超声微阵列传感器)、采集控制芯片3和带电缆柔性轴1b,所述外売1a为铜金属材料的中空圆柱形结构,所述cmut超声传感器阵列2和采集控制芯片3嵌于外壳1a内,并整体与所述带电缆柔性轴1b固定连接,并随带电缆柔性轴1b一起前后移动;其中,
[0029]
所述cmut超声传感器阵列2的封装尺寸为0.5
‑
2mm,包括若干独立电路的振动元件超声单元2a,所述振动元件超声单元2a由若干薄膜振动元件2b组成,所述薄膜振动元件2b使用cmut薄膜结构,包括依次连接的上电极21、振膜22、空腔23及带电极衬底24,并通过电极21和采集控制芯片3连接,所述薄膜振动元件2b的形状可以为圆形或者方形,可以相同或者不同;
[0030]
所述采集控制芯片3包括脉冲信号发生器、带多路复用器的收/发控制开关、高速模拟前端(用于放大、滤波、模数转换)和控制芯片,所述脉冲信号发生器、收/发控制开关、高速模拟前端和控制芯片依次循环线路连接,所述收/发控制开关与cmut超声传感器阵列2
线路连接;
[0031]
上述血管内前视探测装置还包括外径为0.5
‑
3mm的介入导管4,所述介入导管4为ivus导管,所述血管内前视探头置于该介入导管内,所述带电缆柔性轴1b与电机线路连接,血管内前视探头通过电机带动带电缆柔性轴1b,利用带电缆柔性轴1b的移动实现血管内前视探头在介入导管内前后滑动探测及自动回撤;
[0032]
上述血管内前视探测装置还包括上位机(即具有相应的数字信号及图像处理的计算机),所述上位机通过电缆连接采集控制芯片3的控制芯片(型号为us7846101b2,也可由其他相同功能芯片替代)以及电机,该上位机与控制芯片进行信息交互传输并对电机进行实时控制。
[0033]
工作时,血管内前视探头由采集控制芯片进行电子扫描,可以与介入导管一同前后移动。使用上位机控制采集控制芯片进行信号的收发和信号/图像处理,同时通过上位机控制自动回撤装置实现血管内前视探头前后移动扫描。
[0034]
具体的,由上位机控制采集控制芯片的脉冲信号发生器产生激发脉冲信号(模拟激励信号),由通过带多路复用器的收/发控制开关触发前端的cmut传感器阵列,形成一个前视方向的超声扫描声场;接收超声回波信号,通过控制芯片的收/发控制开关和高速模拟前端(放大、滤波、模数转换),到达上位机进行数学信号处理得到前视视场内该扫描方向的成像数据;重复改变阵元延时改变扫描声束的方向,直至完成前方整个视野的数据采集和传输,在上位机进行图像重构和后续处理,得到二维和局部三位图像;根据得到的图像信息,临床医生判断前端血管的堵塞、狭窄情况,并确定导管是否前进或后退;通过导管的回撤或前进,使整个换能器位置向后或前移动一段距离,重复所有前述成像流程,直至完成获取一段血管各个不同位置对应的图像,将这些图像整合成所有探测区域的三维图像。
[0035]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1