一种气动穿刺手术装置
1.本发明涉及医疗器械技术领域,具体涉及一种气动穿刺手术装置。
背景技术:
2.穿刺手术因其创口微小、对病人伤害很小而成为一种常见的手术方式,广泛应用于组织活检、肿瘤消融、注射药物等手术中。目前的穿刺手术过程中存在穿刺针的定位准确度低的问题,医生需要多次尝试才能真正插到目标位置,延长了手术时间比较长,增加了病人遭受的痛苦。此外,由于现有的穿刺手术装置的驱动都采用电机,而电机及其电动相连的部件又难以避免不采用金属材质,因此,在使用现有的穿刺手术装置过程对病人进行ct扫描时,容易造成扫描图像产生金属伪影,因此无法在扫描ct过程中观察穿刺针的位置变化,进而制约了穿刺针位置的调整。
技术实现要素:
3.本发明的目的在于提供一种气动穿刺手术装置,用以解决目前进行穿刺手术过程中存在穿刺针的定位准确度低的问题。
4.本发明提供一种气动穿刺手术装置,包括立板、第一平面移动机构、第二平面移动机构和穿刺针机构,所述第一平面移动机构包括第一移动副和第二移动副,所述第二平面移动机构包括第三移动副和第四移动副,所述穿刺针机构包括进针筒和穿刺针;所述第一移动副和所述第三移动副的固定端设置于所述立板上;所述第二移动副和所述第四移动副分别与所述第一移动副和所述第三移动副的自由端连接;所述第二移动副和所述第四移动副的外端设置于所述进针筒,所述穿刺针设置于所述进针筒上;所述第一移动副、所述第三移动副、所述第二移动副、所述第四移动副和所述进针筒内均设置有一个气动人工肌肉。
5.优选地,所述第一移动副与所述第二移动副相互垂直固定连接;所述第三移动副与所述第四移动副相互垂直固定连接。
6.优选地,所述第一移动副和所述第三移动副均包括纵向外筒、纵向内筒和纵向气动人工肌肉;所述第一移动副和所述第三移动副的纵向内筒一上一下且相互平行固定于所述立板上;所述第一移动副的纵向外筒和所述第三移动副的纵向外筒分别套设在所述第一移动副的纵向内筒和所述第三移动副的纵向内筒的外侧;所述纵向气动人工肌肉的一端设置有充气口,所述第一移动副和所述第三移动副的纵向气动人工肌肉设置于所述第一移动副和所述第三移动副的纵向内筒的内部,且两个纵向气动人工肌肉的充气端均固定于所述立板上,两个纵向气动人工肌肉的非充气端分别与所述第一移动副和所述第三移动副的纵向外筒固定连接。
7.优选地,所述第一移动副和所述第三移动副的纵向外筒的外端均设置有端盖,两个纵向气动人工肌肉的非充气端固定于所述第一移动副和所述第三移动副的端盖上。
8.优选地,所述第一移动副和所述第三移动副的纵向外筒沿着纵向分别设置纵向滑道,所述第一移动副和所述第三移动副的纵向内筒沿着纵向分别设置凸块,当所述第一移
动副的纵向外筒和所述第三移动副的纵向外筒分别套设在所述第一移动副的纵向内筒和所述第三移动副的纵向内筒的外侧时,所述第一移动副和所述第三移动副的纵向内筒的凸块分别设置于所述第一移动副和所述第三移动副的纵向外筒的纵向滑道内。
9.优选地,所述第二移动副和所述第四移动副均包括横向外筒、横向内筒、横向气动人工肌肉、对接杆和连接片,所述第二移动副和所述第四移动副的连接片分别固定于所述第一移动副和所述第三移动副的纵向外筒的外壁上,所述第二移动副和所述第四移动副的横向内筒的内端分别固定于所述第二移动副和所述第四移动副的连接片上;所述第二移动副和所述第四移动副的横向外筒分别套设在所述第二移动副和所述第四移动副的横向内筒上;所述第二移动副和所述第四移动副的横向气动人工肌肉分别设置于所述第二移动副和所述第四移动副的横向内筒的内部,且所述第二移动副和所述第四移动副的横向气动人工肌肉的充气端分别固定于所述第二移动副和所述第四移动副的连接片上,所述第二移动副和所述第四移动副的横向气动人工肌肉的非充气端与所述第二移动副和所述第四移动副的横向外筒固定连接;所述第二移动副和所述第四移动副的对接杆的固定端与所述第二移动副和所述第四移动副的的横向外筒的端部固定连接;所述第二移动副和所述第四移动副的对接杆的自由端设置有球形万向节。
10.优选地,所述第二移动副和所述第四移动副的连接片均设置于气管孔,所述第二移动副和所述第四移动副的横向气动人工肌肉的充气口分别伸出所述第二移动副和所述第四移动副的连接片的气管孔并露出充气口。
11.优选地,所述第二移动副和所述第四移动副的横向外筒沿着纵向分别设置纵向滑道,所述第一移动副和所述第三移动副的横向内筒沿着纵向分别设置凸块,当所述第二移动副的横向外筒和所述第四移动副的横向外筒分别套设在所述第一移动副的横向内筒和所述第三移动副的横向内筒的外侧时,所述第一移动副和所述第三移动副的横向内筒的凸块分别设置于所述第二移动副和所述第四移动副的横向外筒的纵向滑道内。
12.优选地,所述穿刺针机构包括进针气动人工肌肉,所述穿刺针的固定端和所述进针气动人工肌肉均设置所述进针筒且分别位于所述进针筒的两端;所述进针筒的外壁且沿着该外壁纵向设置有一条球形万向节滑槽,该球形万向节滑槽的横截面为带有缺口的圆弧,所述第二移动副和所述第四移动副的对接杆的球形万向节设置于所述球形万向节滑槽内。
13.优选地,所述立板配置有基座,所述立板垂直固定于所述基座上。
14.与现有技术相比,本发明的有益效果是:
15.本发明公开了一种气动穿刺手术装置,纵向气动人工肌肉、横向气动人工肌肉和进针气动人工肌肉通过充气或放气来控制纵向气动人工肌肉的伸长或缩短,以控制相连的外筒沿着内筒纵向方向直线移动,第一移动副与第二移动副相互垂直固定连接且第三移动副与第四移动副相互垂直固定连接形成一体,使得第二移动副和第四移动副的对接杆末端的球形万向节二维空间的活动范围变得可控;随着第二移动副和第四移动副的对接杆在各自平面内移动,第二移动副和第四移动副的进针筒的方向也会随之变化,从而能够到调整穿刺针姿态,同时,进针气动人工肌肉末端与穿刺针固定连接,通过控制进针气动人工肌肉伸缩来控制针头的进退。本发明公开的气动穿刺手术装置,通过控制压缩机给纵向气动人工肌肉、横向气动人工肌肉和进针气动人工肌肉充入压缩气体,以气动的驱动形式控制穿
刺针的空间位置及其针头的进退,大幅度提高了穿刺手术过程中存在穿刺针的定位准确度,此外,使用气动人工肌肉作为驱动形式,不必用电动作为驱动,因而所使用的零部件可以不采用金属材质,因此该穿刺手术气动装置能够跟随病人一起进行ct扫描,从而实现在穿刺手术的术中进行实时的ct扫描,监测针刺入的位置,方便医生进行调整。
附图说明
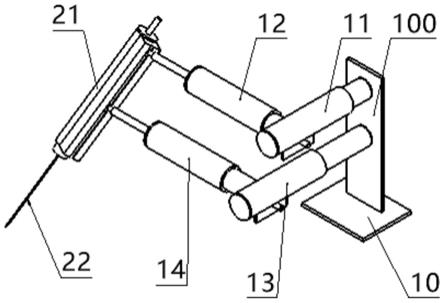
16.图1为本发明实施例1提供的气动穿刺手术机器人装置的结构示意图;
17.图2为本发明实施例1提供的第一平面移动机构的俯视图;
18.图3为本发明实施例1提供的第一、第三移动副的爆炸图;
19.图4为本发明实施例1提供的纵向内筒的横截面的示意图;
20.图5为本发明实施例1提供的纵向外筒的横截面的示意图。
21.图6为本发明实施例1提供的第二平面移动机构的侧视图;
22.图7为本发明实施例1提供的第二、第四移动副的爆炸图;
23.图8为本发明实施例1提供的插针机构的爆炸图;
24.图9为本发明实施例1提供的进针筒的横截面的示意图;
具体实施方式
25.以下实施例用于说明本发明,但不用来限制本发明的范围。
26.实施例1
27.实施例1提供一种气动穿刺手术装置,下面对其结构进行详细描述。
28.参考图1,该气动穿刺手术装置包括支座、第一平面移动机构、第二平面移动机构和穿刺针机构。其中,第一平面移动机构包括第一移动副11和第二移动副12,第二平面移动机构包括第三移动副13和第四移动副14,穿刺针机构包括进针筒21和穿刺针22。
29.其中,支座包括基座10和立板100,立板100垂直固定于基座10上。
30.第一移动副11和第三移动副13的固定端设置于立板100上;第二移动副12和第四移动副14分别与第一移动副11和第三移动副13的自由端连接;
31.第二移动副12和第四移动副14的外端设置于进针筒21,穿刺针22设置于进针筒21上;
32.第一移动副11、第三移动副13、第二移动副12、第四移动副14和进针筒21内均设置有一个气动人工肌肉。
33.第一移动副11与第二移动副12相互垂直固定连接;第三移动副13与第四移动副14相互垂直固定连接。
34.结合图2和图3,第一移动副11和第三移动副13均包括纵向外筒111、纵向内筒112和纵向气动人工肌肉113;
35.需要指出的是,纵向气动人工肌肉113及下文的横向气动人工肌肉123均属于气动人工肌肉,气动人工肌肉是由外部提供的压缩空气驱动,作推拉动作,其过程就像人体的肌肉运动,是现有技术,包括充气口、橡胶管和编织网,充气口与橡胶管连通,编织网包裹整个橡胶管,当向充气口充气时,橡胶管充气径向膨胀过程中长度收缩,当放气后,橡胶管恢复至原长。
36.第一移动副11的纵向内筒112和第三移动副13的纵向内筒112一上一下且相互平行固定于立板100上。
37.第一移动副11的纵向外筒111和第三移动副13的纵向外筒111分别套设在第一移动副11的纵向内筒112和第三移动副13的纵向内筒112的外侧。
38.优选地,第一移动副11的纵向外筒111的外径与第一移动副11的纵向内筒112的内径相等。
39.纵向气动人工肌肉113的一端设置有充气口,纵向气动人工肌肉113设置于第一移动副11的纵向内筒112的内部,且纵向气动人工肌肉113的充气端固定于立板100上,纵向气动人工肌肉113的充气口伸出立板100并露出充气口;纵向气动人工肌肉113的非充气端与第一移动副11的纵向外筒111固定连接。
40.作为一种具体实施方式,第一移动副11和第三移动副13的纵向外筒111的外端均设置有端盖110,两个纵向气动人工肌肉113的非充气端分别固定于第一移动副11和第三移动副13的端盖110上。
41.作为另一种具体实施方式,两个纵向气动人工肌肉113的非充气端分别固定第一移动副11和第三移动副13的纵向外筒111的内壁上。
42.为了防止第二移动副12与第一移动副11之间以及第三移动副13和第四移动副14之间发生相对旋转,主要是要防止第一移动副11和第三移动副13的纵向外筒111发送相对转动,参考图4和图5,第一移动副11和第三移动副13的纵向外筒111沿着纵向分别设置纵向滑道,第一移动副11和第三移动副13的纵向内筒112沿着纵向分别设置有凸块,当第一移动副11的纵向外筒111和第三移动副13的纵向外筒111分别套设在第一移动副11的纵向内筒112和第三移动副13的纵向内筒112的外侧时,第一移动副11和第三移动副13的纵向内筒112的凸块分别设置于第一移动副11和第三移动副13的纵向外筒111的纵向滑道内。
43.结合图6和图7,第二移动副12和第四移动副14均包括横向外筒141、横向内筒142、横向气动人工肌肉143、对接杆144和连接片145;第二移动副12和第四移动副14的连接片145分别固定于第一移动副11和第三移动副13的纵向外筒111的外壁上,第二移动副12和第四移动副14的横向内筒142的内端分别固定于第二移动副12和第四移动副14的连接片145上;
44.第二移动副12和第四移动副14的横向外筒141分别套设在第二移动副12和第四移动副14的横向内筒142上;
45.第二移动副12和第四移动副14的横向气动人工肌肉143分别设置于第二移动副12和第四移动副14的横向内筒142的内部,且第二移动副12和第四移动副14的横向气动人工肌肉143的充气端分别固定于第二移动副12和第四移动副14的连接片145上,第二移动副12和第四移动副14的横向气动人工肌肉143的非充气端与第二移动副12和第四移动副14的横向外筒141固定连接;
46.第二移动副12和第四移动副14的对接杆144的固定端与第二移动副12和第四移动副14的的横向外筒141的端部固定连接;
47.第二移动副12和第四移动副14的对接杆144的自由端设置有球形万向节1440。
48.为了方便对接压缩机的出气口,第二移动副12和第四移动副14的连接片145均设置于气管孔,第二移动副12和第四移动副14的横向气动人工肌肉143的充气口分别伸出第
二移动副12和第四移动副14的连接片145的气管孔并露出充气口,该充气口与压缩机的出气口对接。
49.为了防止第二移动副12和第四移动副14的横向外筒141发送相对转动,第二移动副12和第四移动副14的横向外筒141沿着纵向分别设置纵向滑道,第一移动副11和第三移动副13的横向内筒142沿着纵向分别设置凸块,当第二移动副12的横向外筒141和第四移动副14的横向外筒141分别套设在第一移动副11的横向内筒142和第三移动副13的横向内筒142的外侧时,第一移动副11和第三移动副13的横向内筒142的凸块分别设置于第二移动副12和第四移动副14的横向外筒141的纵向滑道内。
50.参考图8和图9,穿刺针机构包括进针气动人工肌肉23,穿刺针22的固定端和进针气动人工肌肉23均设置进针筒21且分别位于进针筒21的两端;进针筒21的外壁且沿着该外壁纵向设置有一条球形万向节滑槽210,该球形万向节滑槽210的横截面为带有缺口的圆弧,第二移动副12和第四移动副14的对接杆144的球形万向节1440设置于球形万向节滑槽210内。
51.在该实施例中,第一移动副11与第二移动副12相互垂直固定连接,第三移动副13与第四移动副14相互垂直固定连接,使得第二移动副12和第四移动副14的对接杆144末端的球形万向节1440的二维空间活动范围变得可控,纵向气动人工肌肉113、横向气动人工肌肉143和进针气动人工肌肉23通过充气或放气来控制纵向气动人工肌肉113的伸长或缩短,以控制外筒沿着内筒纵向方向直线移动。值得注意的是,上述气动人工肌肉的伸长与缩短的范围有合理的限制,不能使外筒移动到内筒的范围之外。
52.随着第二移动副12和第四移动副14的对接杆144在各自平面内移动,第二移动副12和第四移动副14的进针筒21的方向也会随之变化,从而能够到调整穿刺针22姿态,同时,进针气动人工肌肉23末端与穿刺针22固定连接,通过控制进针气动人工肌肉23伸缩来控制针头的进退。
53.为了向纵向气动人工肌肉113、横向气动人工肌肉143和进针气动人工肌肉23充入压缩气体,因此,该气动穿刺手术装置需要配置空气压缩机。
54.由于该穿刺手术气动装置采用气动人工肌肉作为驱动,不用电动作为驱动,因而所使用的零部件可以不采用金属材质,因此该穿刺手术气动装置能够跟随病人一起进行ct扫描,从而实现在穿刺手术的术中进行实时的ct扫描,监测针刺入的位置,方便医生进行调整。能够跟随病人一起进行扫描而不产生金属伪影,从而能够在穿刺过程中进行ct扫描;操控端的医生能够根据实时的影像,通过在上位机端的设置来随时调整穿刺针的朝向,修正病人移动或呼吸带来的影响,从而使针头达到正确的位置。
55.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1