一种3D打印手指牵伸支具的制作方法
一种3d打印手指牵伸支具的制作方法
技术领域
1.本发明属于医疗器械支具领域,具体涉及一种3d打印手指牵伸支具的制作方法。
背景技术:
2.手部创伤、畸形、肿瘤以及其他疾病都会导致手功能损害,使关节活动受限或僵硬。支具是治疗关节活动受限或僵硬的主要方法之一。其中静态进展性牵伸支具又因为具有较好的治疗效果而被广泛应用。手指静态进展性牵伸支具利用应力松弛原理可使得患者术后康复的单次治疗时间和整个周期都大为缩短。然而现存的手指静态进展性牵伸支具存在一些缺陷,包括:(1)多数支具不符合生物力学;(2)多数支具为单一牵伸方向或通过更换配件达到双向牵伸;(3)成品支具价格昂贵;(4)成品支具无法完全满足个性化需求。
技术实现要素:
3.针对现有手指静态进展性牵伸支具存在的缺陷,本发明利用三维激光扫描技术、计算机辅助设计及3d打印技术,创新性地设计开发了一种符合生物力学,可双向牵伸,满足经济性以及个性化需求的新型手指牵伸支具,从而使手指关节活动受限或关节僵硬的患者获益。
4.为了实现本发明的目的,本发明提供一种3d打印手指牵伸支具的制作方法,包括以下步骤:
5.手部表面数据采集,根据采集后的数据构建网格模型;
6.对所述网格模型进行后处理,以及裁剪出所述支具的主体范围;
7.将裁剪所得的所述支具的主体范围转换为nurbs曲面模型;
8.将所述nurbs曲面模型导入正向三维建模软件进行所述手指牵伸支具的设计以获得支具模型;
9.以及,对所述支具模型进行3d打印成型。
10.在一实施例中,所述手部表面数据采集的步骤中,采用激光扫描仪获取手部表面三维参数,以网格形式导出,保存为stl格式。
11.在一实施例中,对所述网格模型进行后处理的步骤中,包括创建流形、光顺、简化、细分、补孔、重划网格以及网格修复。
12.在一实施例中,使用裁剪工具在模型上裁剪出支具主体的范围,同时向手指背侧整体偏移1.2mm。
13.在一实施例中,所述nurbs曲面模型的转换步骤中,包括构造曲面片、构造格栅及拟合曲面、合并曲面、精简曲面数量,获得nurbs曲面的x_t格式文件。
14.在一实施例中,所述手指牵伸支具的设计步骤中,对所述nurbs曲面模型进行加厚作为支具主体。
15.在一实施例中,所述手指牵伸支具的设计步骤中,包括设计铰链和调节机构,其中所述调节机构采用正反双向螺杆结构。
16.在一实施例中,所述手指牵伸支具的设计步骤中,还包括在所述支具主体上设计垂直于手指的力臂杆。
17.在一实施例中,所述支具模型进行3d打印成型所用材料可以选择pla、pla+、abs或pa等材料,打印完成后添加衬垫和魔术贴等辅料。
18.一种根据如上所述的3d打印手指牵伸支具的制作方法所制备的3d打印手指牵伸支具,所述3d打印手指牵伸支具应用于整形外科、烧伤科、手外科、康复医学科、骨科等领域。
19.本发明的有益效果,本发明所提供的一种3d打印手指牵伸支具的制作方法,通过激光扫描技术获取手部三维参数,以网格形式输出,对网格模型进行后处理,导入正向三维建模软件进行设计,设计完成的支具模型最终通过3d打印技术快速成型。激光扫描和3d打印技术的结合不仅满足了个性化的需求,还使得支具的制作成本大为降低。3d打印手指牵伸支具的调节装置采用正反双向螺杆的设计,该力学传递装置的设计简单、高效,可实现双向无级调节。与此同时,垂直于手指的力臂杆设计,使得支具在调节过程中,牵伸力方向始终与关节面平行,可以有效避免不良应力对关节面的损害,符合生物力学的要求。根据本发明所提供的一种3d打印手指牵伸支具的制作方法所制得的3d打印手指牵伸支具可运用于整形外科、烧伤科、手外科、康复医学科、骨科等领域,针对手部先天畸形、手外伤、手部烧伤等疾病患者关节活动受限或僵硬的治疗。
附图说明
20.为了更清楚地阐述本发明专利的具体实施例的特点,下面将对实施例的附图进行简要介绍。显而易见地,下面描述的附图仅为本发明的一些实施例,对于本领域的普通研究或从业人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他类似的图片。
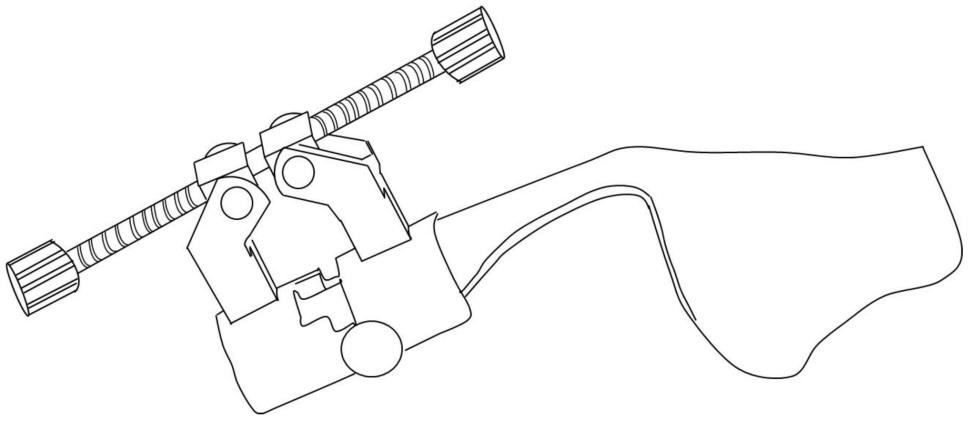
21.图1为手指牵伸支具模型;
具体实施方式
22.下面结合具体实施例,进一步阐述本发明。显然,所描述的实施例仅为本发明的一部分应用,而并非全部。应理解,这些实施例仅用于说明本发明的特性而并非用于限制本发明的范围。本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
23.本实施例提供一种3d打印手指牵伸支具的制作方法,包括以下步骤:
24.手部表面数据采集,根据采集后的数据构建网格模型;
25.对所述网格模型进行后处理,以及裁剪出所述支具的主体范围;
26.将裁剪所得的所述支具的主体范围转换为nurbs曲面模型;
27.将所述nurbs曲面模型导入正向三维建模软件进行所述手指牵伸支具的设计以获得支具模型;
28.以及,对所述支具模型进行3d打印成型。
29.在本实施例中,所述手部表面数据采集的步骤中,采用激光扫描仪获取手部表面三维参数,以网格形式导出,保存为stl格式。
30.具体的,采用三维激光扫描仪对患者手部表面进行数据采集,通过三维激光扫描技术高分辨率地获取患者体表的密集点云数据,可快速构建三维数字模型。采集后的数据以网格形式导出,保存为stl格式。
31.将stl文件导入逆向工程软件类软件(如:geomagic studio 2013),由于自动封装的三角网格模型往往存在缺陷,需要对模型进行相关的后处理。
32.在本实施例中,对所述网格模型进行后处理的步骤中,包括创建流形、光顺、简化、细分、补孔、重划网格以及网格修复。对所述网格模型进行后处理以获得光滑的手部三角网格模型。
33.在本实施例中,使用裁剪工具在模型上裁剪出支具主体的范围,同时向手指背侧整体偏移1.2mm,以方便对所述支具添加衬垫。
34.在本实施例中,经裁剪的曲面模型需从三角网格模型转换为nurbs曲面,先使用精确曲面模块的探测轮廓线进行区域划分,提取轮廓线并进行编辑,所述nurbs曲面模型的转换步骤中,包括构造曲面片、构造格栅及拟合曲面、合并曲面、精简曲面数量,获得nurbs曲面的x_t格式文件。在曲面片构造过程中,若出现扭曲、交叉等问题,则需返回对网格进行修理。
35.在本实施例中,所述手指牵伸支具的设计步骤中,对所述nurbs曲面模型进行加厚作为支具主体。
36.在本实施例中,所述手指牵伸支具的设计步骤中,包括设计铰链和调节机构,其中所述调节机构采用正反双向螺杆结构,可在屈伸两个方向进行无极调节。所述铰链和调节机构的设计需参照患者环指近节和中节手指宽度、长度以及近侧指间关节的轴心位置,以使铰链和调节机构满足手指关节的活动。
37.在本实施例中,所述手指牵伸支具的设计步骤中,还包括在所述支具主体上设计垂直于手指的力臂杆,以避免对关节面产生过多的应力,从而更加符合生物力学的要求。所述铰链、调节机构以及支具主体最后通过布尔运算组合在一起,生成最终的所述支具模型(支具模型保存为stl格式),所述支具模型如图1所示。
38.在本实施例中,经切片软件(如:ultimaker cura 4.6)切片后导入3d打印机(如:ultimaker2 extended+)进行打印。
39.在本实施例中,所述支具模型进行3d打印成型所用材料可以选择pla、pla+、abs或pa等材料,打印完成后添加衬垫和魔术贴等辅料。
40.一种根据如上所述的3d打印手指牵伸支具的制作方法所制备的3d打印手指牵伸支具,所述3d打印手指牵伸支具应用于整形外科、烧伤科、手外科、康复医学科、骨科等领域。
41.本发明所提供的一种3d打印手指牵伸支具的制作方法,通过激光扫描技术获取手部三维参数,以网格形式输出,对网格模型进行后处理,导入正向三维建模软件进行设计,设计完成的支具模型最终通过3d打印技术快速成型。激光扫描和3d打印技术的结合不仅满足了个性化的需求,还使得支具的制作成本大为降低。3d打印手指牵伸支具的调节装置采用正反双向螺杆的设计,该力学传递装置的设计简单、高效,可实现双向无级调节。与此同时,垂直于手指的力臂杆设计,使得支具在调节过程中,牵伸力方向始终与关节面平行,可以有效避免不良应力对关节面的损害,符合生物力学的要求。
42.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1