外部可编程磁阀组件和控制器的制作方法
外部可编程磁阀组件和控制器
1.相关申请的交叉引用
2.本技术是2017年8月11日提交的且标题为“externallyprogrammable magnetic valve assembly and controller”的美国专 利申请号15/675,497的部分继续申请,该申请要求2016年8月12日提交的 且标题为“externally programmable magnetic valve assembly andcontroller”的美国临时申请号62/374,046(已过期)在35 u.s.c.
§
119(e) 下和pct第8条下的权益,其全部内容通过引用并入本文中。
背景技术:
3.脑积水是与由大脑的脑室内液体的净积聚引起的脑室扩大相关的病症。 非交通性脑积水是与脑室系统阻塞相关的脑积水,且通常由增大的脑脊液 (csf)压力表征。相反,交通性脑积水是与蛛网膜下腔内的阻塞性病变相 关的脑积水。常压脑积水(nph),交通性脑积水的一种形式,主要发生在 60岁以上的人群中并由在标称正常压力下的csf表征。nph的典型症状包 括步态障碍、尿失禁和痴呆。总之,nph表现为具有几乎正常的csf压力 的脑室扩大。
4.治疗脑积水的目标是降低脑室压力,使得脑室尺寸回到正常水平。脑积 水通常通过向大脑中植入分流器来治疗,该分流器从脑室或从腰椎鞘间隙 (在交通性脑积水中)排出过量的csf。这样的分流器在它们将液体从脑室 转移到心房时被称为脑室
‑
心房(va)分流器,或者当液体是从脑室转移到 腹膜时被称为脑室
‑
腹腔(vp)分流器,或者当csf是从腰椎区域转移到腹 腔时被称为腰椎
‑
腹腔(lp)分流器。这些分流器通常包括通过大脑插入脑 室中的脑导管(用于脑室分流)或通过针插入腰椎鞘间隙中的腰导管(用于 腰椎分流器)以及将液体从脑室排出到身体的储存器(如颈静脉(脑室分流) 或腹膜腔(脑室或腰椎分流))的单向阀系统。
5.美国专利号4,595,390描述了一种分流器,该分流器具有由不锈钢弹簧 偏压抵靠锥形阀座的球形蓝宝石球。csf的压力在倾向于将球从座上抬起的 方向上推动蓝宝石球和弹簧。当阀两端的压力差超过所谓的“爆裂”或打开压 力时,球从座上抬起以允许csf流过阀并从而排出csf。美国专利号 4,595,390还描述了一种外部可编程的分流阀,该分流阀允许通过在植入式分 流器的位置上方应用发送器来改变阀的压力设置,所述发送器在患者头部上 方发射磁信号。使用带有磁发送器的外部编程器允许阀的压力设置根据脑室 的尺寸、csf压力和治疗目标而被无创地调节。
6.美国专利号4,615,691描述了可以与例如美国专利号4,595,390的分流阀 一起使用的磁步进电机的示例。
7.虽然磁可调节分流器允许外部调节植入式分流器的压力,但是这些现有 的分流器具有一些局限性。例如,当带有植入式磁可调节分流阀的患者在强 磁体或强磁场附近时,诸如磁共振成像(mri)设备,阀的压力设置会改变。 此外,现有磁阀的压力设置的验证可能需要在阀上使用不透射线标记,该不 透射线标记是使用在阀植入的位置拍摄x射线来检测的。另外,一些用于调 节植入阀的压力设置的编程器相对较大且较重并且需要连接到
壁装插座。
8.因此,希望设计改进的脑室和腰椎分流器,以及改进的编程器来调节分 流器。
技术实现要素:
9.各方面和各实施例涉及一种外部可编程阀组件,其包括磁电机,该磁电 机配置为连续地或以有限的增量来增大或减小阀的压力设置。阀组件可以适 于植入患者体内以从患者的器官或体腔排出流体。在这些实施例中,阀组件 包括入口端口,该入口端口适于流体连接(在制造期间或由外科医生在手术 期间)到导管的一端。将导管的第二端插入器官或体腔中以引出流体。阀组 件还包括出口端口,其适于流体连接到引流导管的一端。引流导管的另一端 可以插入合适的体腔(诸如,静脉或腹膜腔)或插入身体外部的引流容器(诸 如,袋子)。可以使用本发明的阀组件引流的器官和体腔的示例包括但不限 于眼、脑室、腹膜腔、心包囊、子宫(妊娠期)和胸膜腔。特别地,阀组件 可以适于植入患有脑积水的患者体内。在这样的实施例中,入口端口适于流 体连接到流入导管(即,脑内导管或鞘内导管)的第一端,并且出口端口适 于流体连接到引流导管的第一端。当植入患者体内时,将脑内导管的第二端 插入患者的脑室或腰椎鞘内间隙,并将引流导管的第二端插入患者的合适的 身体储器,例如颈静脉或腹膜腔。因此,当植入患者体内时,该装置提供患 者的脑室或腰椎区域与受试者的身体储器之间的流体连通,当脑室内或csf 压力超过阀组件的打开压力时,允许脑脊液从脑室或腰椎区域通过阀壳流到 身体储器。患者可能患有脑积水,颅内压增高,或可能患有正常的压力性脑 积水。从脑室或腰椎间隙移除csf降低了脑室内压力。
10.其它方面和实施例涉及一种确定植入阀组件的压力设置以及在植入患 者体内后调节阀组件的压力设置的方法。如下更详细讨论的,根据某些实施 例,阀的压力设置的调节可以经由阀组件中的磁致动转子的位移来实现,从 而导致提供抵靠阀元件的偏压力的弹簧的张力的变化。转子将响应于施加的 外部磁场而在转子壳内旋转。
11.如下更详细讨论的,某些方面和实施例涉及一种适用于结合到可植入阀 组件中的可磁操作的电机。磁电机组件包括:具有多个定子凸角(lobe)的 定子,以及包括多个磁极且配置为围绕定子旋转的转子。外部施加的磁场(来 自其中植入了阀组件的身体外部)被用来磁化定子以便引起转子的旋转,如 下进一步讨论的。可磁操作的电机具有以下优点:允许在可植入阀组件内的 机械运动来改变阀的压力设置,从而避免需要从身体外部物理连接到阀组件 或使用植入的电池。另外,如下进一步讨论的,磁电机组件的实施例配置为 高度抵抗来自与期望的电机控制没有特别相关联的外部强磁场(诸如,由 mri或核磁共振(nmr)装置产生的场)的任何影响。此外,磁电机的某 些实施例包括一种机构,通过该机构,人员(例如,医生)可以查看其中使 用了磁电机的阀的当前压力设置,而不需要使用x射线或其他成像技术。
12.某些方面还包括一种在患者需要时减小患者脑室尺寸的方法,该方法包 括将阀组件手术植入到患者体内,并且在阀植入之前,将阀的打开压力设置 为小于脑室压力的压力。替代地,植入阀组件的打开压力可以设置为高于脑 室压力的压力,使得在患者需要时可以增大患者脑室尺寸。
13.根据一个实施例,可手术植入的分流阀组件包括:壳体、由生理相容材 料形成的壳体的外部、以及设置在壳体内的可磁操作的电机,该可磁操作的 电机包括定子和转子,
该转子配置为响应于由外部磁场引起的定子的磁极性 变化而相对于定子旋转,转子包括转子壳和多个转子永磁体元件,这些转子 永磁体元件设置在转子壳内的环中并且布置有交替的磁极性,转子相对于定 子的旋转产生分流阀组件的选定的压力设置。分流阀组件还包括:定位在转 子壳和壳体的外部之间的入口端口,该入口端口在其转子壳端部处终止于阀 座中;弹簧;通过弹簧偏压抵靠阀座的阀元件,阀元件和阀座一起形成孔; 以及定位在转子壳和壳体的外部之间的出口端口,分流阀组件配置为使得孔 在入口端口中的流体的压力超过分流阀组件的选定的压力设置时打开,以便 将流体通过孔排出到出口端口中。
14.另一个实施例涉及一种系统,该系统包括:可外部编程的可手术植入的 分流阀组件、不可植入的发送器头、以及联接到发送器头的控制装置。可手 术植入的分流阀组件可以包括:具有由生理相容材料形成的外部的壳体;设 置在壳体内的可磁操作的电机,该可磁操作的电机包括定子和转子,该转子 配置为响应于由外部磁场引起的定子的磁极性的变化而相对于定子旋转,该 转子包括转子壳和多个转子永磁体元件,所述多个转子永磁体元件设置在转 子壳内的环中且布置有交替的磁极性,转子永磁体元件的数量使得多个转子 永磁体元件中的径向相对的磁体具有相同的磁极性,转子相对于定子的旋转 产生分流阀组件的选定的压力设置;定位在转子壳和壳体的外部之间的入口 端口,该入口端口在其转子壳端部处终止于阀座中;弹簧;由弹簧偏压抵靠 阀座的阀元件,阀元件和阀座一起形成孔;以及定位在转子壳和壳体的外部 之间的出口端口,分流阀组件配置为使得孔在入口端口中的流体的压力超过 分流阀组件的选定的压力设置时打开,以便将流体通过孔排出到出口端口 中。不可植入的发送器头可以包括磁体组件,该磁体组件配置为产生外部磁 场以引起转子相对于定子的旋转。控制装置可以配置为向发送器头提供信号 以控制发送器头产生外部磁场,以便将分流阀组件的压力设置设置为所选定 的压力设置。
15.另一个实施例涉及一种可手术植入的阀,该阀包括用于调节阀的压力设 置的磁电机,该磁电机与电源物理隔离并且由从阀的外部施加的外部磁场提 供动力。磁电机可以包括:转子,该转子包括圆形转子壳和多个转子永磁体, 所述多个转子永磁体设置在转子壳内的环中且布置有交替的磁极性,转子壳 配置为围绕中心旋转轴线旋转;以及定子,该定子由软磁且磁可透过的材料 构成,其成形为相对的圆形定子盘并相对于转子磁体下方的四个象限中的每 个定位,使得当在外部场的影响下被磁化时,定子加强并定向其附近的局部 磁场以便引起转子围绕中心旋转轴线的增量运动。转子永磁体的数量可以是 使得多个转子永磁体中的径向相对的磁体具有相同或相反的磁极性。
16.根据另一个实施例,可手术植入的分流阀组件包括:弹簧;由弹簧偏压 抵靠阀座的阀元件,阀元件和阀座一起形成孔,流体通过该孔由阀分流;以 及用于调节阀的压力设置的磁电机,该磁电机与电源物理隔离并且由从阀组 件的外部施加的外部磁场提供动力。磁电机可包括:转子,该转子具有转子 壳、设置在转子壳内的环中且布置有交替的磁极性的多个转子永磁体、以及 接合弹簧的凸轮,所述转子配置为围绕中心旋转轴线旋转;以及定子,该定 子由软磁且磁可透过的材料构成并定位在转子下方,使得当在外部场的影响 下被磁化时,定子加强并定向其附近的局部磁场以便引起转子围绕中心旋转 轴线的旋转,所述转子的旋转引起凸轮的旋转,所述凸轮的旋转调节弹簧抵 靠阀元件的张力,从而调节分流阀组件的压力设置。
17.根据另一个实施例,可手术植入的分流阀组件包括:弹簧;由弹簧偏压 抵靠阀座
的阀元件,阀元件和阀座一起形成孔,流体通过该孔由阀分流;以 及用于调节阀的压力设置的磁电机,该磁电机与电源物理隔离并且由从阀组 件的外部施加的外部磁场提供动力。磁电机可包括:转子,该转子具有转子 壳、设置在转子壳内的环中且布置有交替的磁极性的多个转子永磁体、以及 接合弹簧的凸轮,所述转子配置为围绕中心旋转轴线旋转;定子,该定子由 软磁且磁可透过的材料构成并位于转子下方,使得当在外场的影响下被磁化 时,定子加强并定向其附近的局部磁场以便引起转子围绕中心旋转轴线的旋 转,所述转子的旋转引起凸轮的旋转,所述凸轮的旋转调节弹簧抵靠阀元件 的张力,从而调节分流阀组件的压力设置;以及机械制动器,该机械制动器 在锁定位置和解锁位置之间可磁操作,并且配置为在锁定位置中防止转子旋 转。
18.另一个实施例涉及一种可手术植入的阀,该阀包括用于调节阀的压力设 置的磁电机,该磁电机与电源物理隔离并且由从阀的外部施加的外部磁场的 影响提供动力,该磁电机包括:转子,该转子包括圆形转子壳和多个转子永 磁体,所述多个转子永磁体设置在转子壳内的环中且布置有交替的磁极性, 转子壳配置为围绕中心旋转轴线旋转;以及x形的定子,该x形的定子由 软磁且磁可透过的材料构成并且相对于转子成形和定位,使得当在外部磁场 的影响下被磁化时,定子加强并定向其附近的局部磁场以便引起转子围绕中 心旋转轴线的增量运动。转子永磁体的数量可以使得多个转子永磁体中的径 向相对的磁体具有相同或相反的磁极性。
19.根据另一个方面,一种在患者需要时调节在患者体内植入的分流阀组件 的工作(操作)压力的方法包括在植入的分流阀组件附近和患者体外施加外 部磁场。
20.根据一个实施例,一种在患者需要时减小患者脑室尺寸的方法包括在患 者体内植入分流阀组件,并且在阀植入之前,将阀组件的选定的压力设置为 小于患者的脑室压力的压力。
21.根据另一个实施例,一种治疗患有脑积水的患者的方法包括在患者体内 植入分流阀组件,并将分流阀组件的选定的压力设置为小于患者的脑室压力 的压力。
22.在另一个实施例中,一种在患者需要时增大患者脑室尺寸的方法包括在 患者体内植入分流阀组件,并将分流阀组件的选定的压力设置为大于患者的 脑室压力的压力。
23.在治疗过程期间,可以预期的是,将需要由临床医生执行增大或减小阀 的选定的操作压力以有效地管理患者的病症。然而,在使用期间,阀将被暴 露在环境磁场中,这可能会改变阀的工作压力。各方面和各实施例提供了一 种阀机构设计,其有助于使用由编程器产生的磁场来调节阀机构,同时抵抗 外来环境磁场的调节。
24.其它方面和实施例涉及一种用于设置手术可植入的分流阀中的压力的 套件。在一些实施例中,套件包括:具有可磁操作的电机的可手术植入的分 流阀组件,所述可磁操作的电机配置为提供分流阀组件的选定的压力设置; 压力读取器,其配置为提供可手术植入的分流阀组件的压力读数;以及具有 至少一个编程器磁体的编程器,所述至少一个编程器磁体可选择性地移动, 并配置为致动可磁操作的电机,以允许用户调节可手术植入的分流阀组件的 压力设置以匹配编程器的压力设置点。
25.在一些实施例中,压力读取器还包括在压力读取器的上表面上的箭头。
26.在一些实施例中,压力读取器还包括在压力读取器的下表面上限定的凹 表面。
27.在一些实施例中,编程器还包括用户界面。
28.在一些实施例中,编程器还包括用于增大压力设置点的第一按钮和用于 减小压力设置点的第二按钮。
29.在一些实施例中,编程器还包括轮,该轮沿第一方向可旋转以增大压力 设置点,并且该轮沿第二方向可旋转以降低压力设置点。
30.在一些实施例中,编程器还包括在编程器的下表面上的腔。
31.在一些实施例中,压力读取器包括磁体和霍尔传感器中的一个。
32.在一些实施例中,可手术植入的分流阀组件包括:壳体,该壳体的外部 由生理相容材料形成;设置在壳体内的可磁操作的电机,可磁操作的电机包 括定子和转子,该转子配置为响应于由外部磁场引起的定子的磁极性的变化 而相对于定子旋转,该转子包括转子壳和多个转子永磁体元件,该多个转子 永磁体元件设置在转子壳内的环中且布置有交替的磁极性,该转子相对于定 子的旋转产生分流阀组件的选定的压力设置;定位在转子壳和壳体的外部之 间的入口端口,该入口端口在其转子壳端部终止于阀座中;弹簧;通过弹簧 偏压抵靠阀座的阀元件,阀元件和阀座一起形成孔;以及定位在转子壳和壳 体的外部之间的出口端口,所述分流阀组件配置为使得孔在入口端口中的流 体压力超过分流阀组件的选定的压力设置时打开,以便将流体通过孔排出到 出口端口中。
33.在一些实施例中,可手术植入的分流阀组件包括:转子标记,该转子标 记附连到转子以使得转子标记与转子一起旋转;以及固定地附连到壳体的壳 体标记,其中转子标记相对于壳体标记的位置指示可手术植入的分流阀组件 的压力设置。
34.在一些实施例中,转子标记包括钽,且壳体标记包括钽。
35.在一些实施例中,可磁操作的电机是具有可旋转的转子的步进电机,并 且其中可手术植入的分流阀组件还包括:机械制动机构,该机械制动机构在 锁定位置和解锁位置之间是可磁操作的,并且配置为在锁定位置中防止转子 的旋转;以及指示器磁体组件,其配置为允许外部传感器磁性地确定转子的 位置,从而确定压力设置。
36.另一个实施例涉及一种包括壳体的可手术植入的阀组件。壳体的外部由 生理相容材料形成。阀组件还包括设置在壳体内的可磁操作的电机。可磁操 作的电机包括定子和转子,该转子配置为响应于由外部磁场引起的定子的磁 极性的变化而相对于定子旋转。转子包括转子壳和多个转子永磁体元件,该 多个转子永磁体元件设置在转子壳内的环中并且布置有交替的磁极性。转子 相对于定子的旋转产生分流阀组件的选定的压力设置。阀组件还包括位于转 子壳和壳体的外部之间的入口端口,入口端口在其转子壳端部终止于阀座 中。阀组件还包括弹簧、由该弹簧偏压抵靠阀座的阀元件、阀元件和阀座一 起形成孔,以及位于转子壳和壳体的外部之间的出口端口。阀组件配置为使 得孔在入口端口中的流体压力超过分流阀组件选定的压力设置时打开以便 使流体通过该孔排出到出口端口中。阀组件还包括可磁操作的机械制动器组 件,该组件包括具有指示器壳体和设置在指示器壳体内的磁体的指示器;以 及制动器,该制动器联接到指示器,且响应于指示器的运动而在锁定位置(其 中制动器定位在多个电机齿的齿之间以防止转子的旋转)和解锁位置(其中 制动器脱离多个电机齿的齿)之间可移动,指示器响应于被暴露于外部磁场 而可移动。
37.阀组件的实施例还可以包括将转子壳配置为包含与弹簧接合的凸轮,使 得转子的旋转改变弹簧抵靠凸轮的偏压张力,从而调节弹簧抵靠阀元件的张 力以产生分流阀组件的所选定的压力设置。凸轮可以形成为实现阿基米德螺 旋或阿基米德螺旋的组合的形
状。弹簧可以是悬臂弹簧。悬臂弹簧可以包括 靠在阀元件上的悬臂以及靠在凸轮上的第二臂。转子壳还可以包括防止转子 的旋转的360度旋转的转子止动件。定子可以是加号(+)形。阀组件还包 括与弹簧接合且与转子壳成一体的凸轮,使得转子的旋转引起凸轮的旋转且 调节弹簧抵靠阀元件的张力。弹簧可以是悬臂弹簧,其包括支点、附连到支 点且配置为与凸轮接合的第一臂,以及从支点延伸的且具有配置为靠在阀元 件上的自由端的悬臂。支点、第一臂和悬臂可以配置为提供杠杆效果,使得 由凸轮施加到第一臂的第一力被悬臂弹簧转换成抵靠阀元件所施加的第二 力,第二力小于第一力。弹簧可以是悬臂弹簧。可磁操作的电机还包括定向 指示器磁体的第一定位磁体和第二定位磁体,该指示器磁体允许外部传感器 磁性地确定转子的位置。阀组件还可以包括转子标记(附连到转子使得转子 标记与转子一起旋转)以及固定地附连到壳体的壳体标记。转子标记相对于 壳体标记的位置可以指示可手术植入的分流阀组件的压力设置。转子标记可 以包括钽,且壳体标记可以包括钽。
38.另一个实施例涉及一种用于在可手术植入的分流阀中设置压力的套件。 在一个实施例中,套件包括具有配置为提供分流阀组件的选定的压力设置的 可磁操作的电机的可手术植入的分流阀组件、配置为检测可手术植入的分流 阀组件的压力设置的监测器装置,以及具有至少一个编程器磁体的编程器装 置。至少一个编程器磁体可选择性地移动,并且配置为致动可磁操作电机以 允许用户调节可手术植入的分流阀组件的压力设置以匹配编程器的压力设 置点。可手术植入的分流阀组件包括可磁操作的机械制动器组件,可磁操作 的机械制动器组件包括具有指示器壳体和设置在指示器壳体内的磁体的指 示器,以及制动器,该制动器联接到指示器,且于响应指示器的运动而在锁 定位置(其中制动器定位在多个电机齿的齿之间以防止转子的旋转)和解锁 位置(其中制动器脱离多个电机齿的齿)之间是可移动,指示器响应于暴露 于由编程器装置施加的外部磁场而是可移动的。
39.套件的实施例还可以包括将编程器配置为具有用户界面。编程器装置还 可以包括至少一个按钮来打开和关闭编程器装置。编程器装置的用户界面可 以包括用于增大压力设置点的第一按钮和用于减少减小压力设置点的第二 按钮。编程器装置可以包括至少一个开始按钮来启动编程序列。用户界面还 可以包括配置为显示压力读数的液晶显示器(lcd)。编程器装置可以包括 壳体、联接到壳体的电机,以及联接到电机且配置为相对于壳体旋转的磁体 组件。磁体组件可以包括至少一个永磁体以在可手术植入的分流阀组件上施 加外部磁场。电机可以包括具有驱动齿轮的轴。磁体组件还可以包括具有轴 承的磁体支撑件、联接到驱动齿轮的从动齿轮、联接到磁体支撑件的磁性桥 接板,并且至少一个永磁体被联接到磁性桥接板。电机可以是dc电机。编 程器装置可以包括软件来控制至少一个永磁体的运动以实现合适的编程序 列。监测器装置可以包括用户界面。该用户界面可以包括用于打开和关闭监 测器装置的按钮。该用户界面还可以包括配置为显示压力设置读数的液晶显 示器(lcd)。监测器装置可以包括壳体以及由该壳体支撑的监测器组件。 监测器组件可以包括监测器传感器,其配置为将监测器组件居中并检测可手 术植入的分流阀组件的可磁操作的电机的位置。至少一个监测器传感器可以 包括用于将监测器组件居中的第一传感器和用于检测可手术植入的分流阀 组件的可磁操作的电机的位置的第二传感器。阀组件还可以包括壳体。壳体 的外部由生理相容材料形成。可磁操作的电机可以被设置在壳体内。可磁操 作的电机可以包括定子和转子,转子配置为响应于由外部磁场引起的
定子的 磁极性变化而相对于定子旋转。转子可以包括转子壳以及多个转子永磁体元 件,所述转子永磁体元件设置在转子壳内的环中且布置有交替的磁极性。转 子相对于定子的旋转可以产生分流阀组件的选定的压力设置。转子壳可以具 有多个电机齿。阀组件还可以包括定位在转子壳和壳体的外部之间的入口端 口,该入口端口在其转子壳端部终止于阀座中。阀组件还可以包括弹簧、由 弹簧偏压抵靠阀座的阀元件,阀元件和阀座一起形成孔,以及定位在转子壳 和壳体的外部之间的出口端口。阀元件可以配置为使得孔在入口端口中的流 体的压力超过分流阀组件的选定的压力设置时打开,以便将流体通过孔排出 到出口端口中。阀组件可以包括转子标记,该转子标记附连到转子以使得转 子标记与转子一起旋转,以及固定地附连到壳体的壳体标记。转子标记相对 于壳体标记的位置可以指示可手术植入的分流阀组件的压力设置。转子标记 可以包括钽,且壳体标记包括钽。套件还可以包括定位盘,该定位盘用于在 可手术植入的阀组件上定位监测器装置以及可选地定位编程器装置。
40.另一个实施例涉及一种用于在可手术植入的分流阀中设置压力的套件。 在一个实施例中,套件包括具有配置为提供分流阀组件的选定的压力设置的 可磁操作的电机的可手术植入的分流阀组件、配置为检测可手术植入的分流 阀组件的压力设置读数的监测器装置,以及具有至少一个编程器磁体的编程 器装置。至少一个编程器磁体可选择性地移动,并且配置为致动可磁操作电 机以允许用户调节可手术植入的分流阀组件的压力设置以匹配编程器的压 力设置点。编程器装置包括壳体、联接到壳体的电机,以及联接到电机且配 置为相对于壳体旋转的磁体组件;该磁体组件包括至少一个永磁体以在可手 术植入的分流阀组件上施加外部磁场。
41.套件的实施例还可以包括将编程器配置为具有用户界面。编程器装置还 可以包括至少一个按钮来打开和关闭编程器装置。编程器装置的用户界面可 以包括用于增大压力设置点的第一按钮和用于减少减小压力设置点的第二 按钮。编程器装置可以包括至少一个开始按钮来启动编程序列。电机可以包 括具有驱动齿轮的轴。磁体组件还可以包括具有轴承的磁体支撑件、联接到 驱动齿轮的从动齿轮、联接到磁体支撑件的磁性桥接板,并且至少一个永磁 体被联接到磁性桥接板。电机可以是dc电机。套件还可以包括定位盘,该 定位盘用于在可手术植入的阀组件上定位监测器装置以及可选地定位编程 器装置。编程器装置可以配置为,将阀装置的转子在第一方向上旋转到最低 压力设置,之后开始将转子在第二相反的方向上旋转到选定的压力设置。
42.另一个实施例涉及一种用于在可手术植入的分流阀中设置压力的套件。 在一个实施例中,套件包括具有配置为提供分流阀组件的选定的压力设置的 可磁操作的电机的可手术植入的分流阀组件、配置为检测可手术植入的分流 阀组件的压力设置读数的监测器装置,以及具有至少一个编程器磁体的编程 器装置。至少一个编程器磁体可选择性地移动,并且配置为致动可磁操作电 机以允许用户调节可手术植入的分流阀组件的压力设置以匹配编程器的压 力设置点。监测器包括壳体以及由该壳体支撑的监测器组件。监测器组件包 括至少一个监测器传感器,其配置为将监测器组件居中并且检测可手术植入 的分流阀组件的可磁操作的电机的位置。
43.套件的实施例还可以包括将监测器装置配置为具有用户界面。该用户界 面可以包括用于打开和关闭监测器装置的按钮。该用户界面还可以包括配置 为显示压力设置读
数的液晶显示器(lcd)。套件还可以包括定位盘,该定 位盘用于在可手术植入的分流阀组件上定位监测器装置以及可选地定位编 程器装置。监测器还可以包括配置为调回(recall)之前的压力读数的压力调 回按钮。至少一个监测器传感器可以包括用于将监测器组件居中的第一传感 器以及用于检测可手术植入的分流阀组件的可磁操作的电机的位置的第二 传感器。
44.下面详细讨论这些示例性方面和实施例的其他方面、实施例和优点。在 此公开的实施例可以以与在此公开的原理中的至少一个一致的任何方式与 其他实施例组合,并且对“实施例”、“一些实施例”、“替代实施例”、“各个实 施例”、“一个实施例”等的参考不一定是相互排斥的,并且旨在表示所描述 的特定特征、结构或特性可包括在至少一个实施例中。在此出现的这些术语 不一定都指同一实施例。
附图说明
45.下面参考附图讨论至少一个实施例的各个方面,其中相同的附图标记在 整个不同视图中指代相同的部件。为清楚起见,并非每个部件都可以在每个 图中被标记。附图不一定按比例绘制,而是将重点放在说明本发明的原理上。 包括附图是为了提供对各个方面和实施例的说明和进一步理解,并且附图包 含在本说明书中并构成本说明书的一部分,但并不旨在作为本发明的限制的 限定。在附图中:
46.图1a是根据本发明的各方面的可植入阀组件的一个示例的平面图,其 示出了顶视图;
47.图1b是图1a的阀组件的截面图;
48.图2是根据本发明的各方面的可植入阀的一个示例的三维图;
49.图3a是示出根据本发明的各方面的对应于图2中所示的示例的可植入 阀的一个示例的平面图的图;
50.图3b是图3a中所示的可植入阀的示例的侧视图;
51.图4a是沿着图3a的线a
‑
a截取的图2和图3a
‑
图3b的阀的一个示例 的截面图;
52.图4b是沿着图3a的线b
‑
b截取的图2和图3a
‑
图3b的阀的示例的截 面图;
53.图4c是沿着图3a的线c
‑
c截取的图2和图3a
‑
图3b的阀的示例的截 面图;
54.图5是根据本发明的各方面的图2和图3a
‑
图3b的阀的示例的三维截 面图;
55.图6a是示出根据本发明的各方面的图5的阀的一部分的放大视图的图, 其中凸轮示出为处于抵抗偏压弹簧的最小张力的位置;
56.图6b是示出示出根据本发明的各方面的图5的阀的一部分的另一视图 的图,其中凸轮处于抵抗偏压弹簧的最小张力的位置;
57.图6c是示出根据本发明的各方面的图5的阀的一部分的放大视图的图, 其中所述凸轮处于抵抗偏压弹簧的最大张力的位置;
58.图6d是示出根据本发明的各方面的图6的阀的一部分的放大视图的图, 其出了偏压抵靠阀元件和凸轮的弹簧的示例;
59.图7a是示出根据本发明的各方面的板簧的示例的图;
60.图7b是示出根据本发明的各方面的安装在阀中的图7的板簧的示例的 局部透视图;
61.图8a是示出根据本发明的各方面的u形弹簧的示例的图;
62.图8b是示出根据本发明的各方面的安装在可编程阀中的图8a的u形 弹簧的图;
63.图8c是示出当可编程阀设置在最低压力设置时图8b的可编程阀的一 部分的图;
64.图8d是示出当可编程阀设置在最高压力设置时图8b的可编程阀的一 部分的图;
65.图9a是示出根据本发明的各方面的弹簧的另一个示例的图;
66.图9b是示出根据本发明的各方面的接合阀元件的图9a的弹簧的图;
67.图10a是根据本发明的方面的用于可磁操作的可植入阀的实施例中的 转子的一个示例的示意图,其示出了定位成用于阀的最小压力设置的转子;
68.图10b是图10a的转子的示意图,其示出了定位成用于阀的最大压力 设置的转子;
69.图11a是根据本发明的各方面的植入阀以及具有控制和显示的外部阀 编程器的示例的图;
70.图11b是根据本发明的各方面的植入装置以及外部编程器的另一示例 的图;
71.图11c是根据本发明的各方面的植入阀以及用于读取阀的压力设置的 压力读取装置的示例的图;
72.图12是根据本发明的各方面的可与可植入可编程阀结合使用的外部控 制装置的一个示例的框图;
73.图13是示出根据本发明的各方面的包括12个转子磁体元件并由包括多 个电磁体的控制器控制的磁电机的一个示例的操作的图;
74.图14是根据本发明各方面的磁电机的一个示例的三维局部截面图;
75.图15是示出根据本发明的各方面的对图13的控制器的电磁体进行激励 以实现磁转子的顺时针旋转的序列的示例的表;
76.图16a
‑
图16h是示出定子的磁极性和响应于图15的激励序列的转子的 运动的图;
77.图17是示出根据本发明的各方面的对图13的控制器的电磁体进行激励 的以实现磁转子的逆时针旋转的序列的示例的表;
78.图18a
‑
图18h是示出定子的磁极性和响应于图17的激励序列的转子的 运动的图;
79.图19是根据本发明的各方面的可与可植入阀组件的实施例一起使用的 外部阀编程器的另一示例的框图;
80.图20a是根据本发明的各方面的用于图19的外部阀编程器的永磁体组 件的一个示例的图;
81.图20b是根据本发明的各方面的用于图19的外部阀编程器的永磁体组 件的另一示例的图;
82.图21a
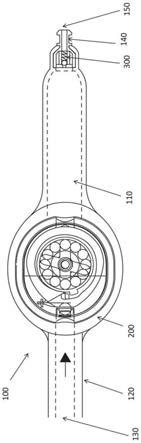
‑
图21e是示出根据本发明的各方面的在结合有图20a的永磁体 组件的外部阀编程器的示例的控制下改变定子的磁极性和转子的运动的示 例的图;
83.图22是示出根据本发明的各方面的如图21a
‑
图21e所例举的表示外部 永磁体阀编程器的一个完整旋转的定子的极性变化和转子运动的示例的流 程图;
84.图23a是示出根据本发明的各方面的阀编程器的一个示例的顶视图的 图;
85.图23b是示出图23a的阀编程器的底视平面图的图;
86.图23c是示出图23a
‑
图23b的阀编程器的端视图的图;
87.图23d是示出图23a
‑
图23c的阀编程器的透视图的图;
88.图23e是示出根据本发明的各方面的阀编程器的另一例的顶视平面图;
89.图24是根据本发明的各方面的用于操作图23a
‑
图23d的阀编程器以对 可植入阀的压力设置编程的方法的一个示例的流程图;
90.图25a
‑
图25c是示出根据本发明的各方面的与十二磁体转子组合的定 子的不同配置的示例的图;
91.图26a
‑
图26c是示出根据本发明的各方面的与十二磁体转子组合的定 子的其他示例的图;
92.图27是根据本发明的各方面的包括参考磁体元件的转子的一个示例的 图;
93.图28a
‑
图28c是示出根据本发明的各方面的包括参考磁体元件的电机 组件的其他示例的图;
94.图29是根据本发明的各方面的外部阀编程器的一个示例的框图,该外 部阀编程器包括用于检测参考磁体元件的磁体传感器;
95.图30a是根据本发明的各方面的压力读取器的一个示例的透视图;
96.图30b是图30a的压力读取器的顶视平面图;
97.图31是根据本发明的各方面的操作压力读取器以读取植入阀的压力设 置的方法的一个示例的流程图;
98.图32是示出根据本发明的各方面的包括参考或位置指示磁体元件的电 机的另一个示例的截面图;
99.图33是根据本发明的各方面的包括制动机构的可编程阀的一个示例的 局部截面三维视图;
100.图34是示出根据本发明的各方面的制动机构的示例的某些方面的示意 图;
101.图35是示出根据本发明的各方面的用于结合磁制动控制器机构的图19 的外部阀编程器的永磁体组件的另一示例的图;
102.图36是根据本发明的各方面的对植入式可编程阀进行编程的方法的一 个示例的流程图;
103.图37a是根据本发明的各方面的示出制动器处于锁定位置的图33的可 编程阀的一个示例的截面图;
104.图37b是示出制动器处于解锁位置的对应的截面图;
105.图38是示出根据本发明的各方面的用于图19的外部阀编程器的永磁体 组件的另一示例的图;
106.图39是根据本发明的各方面的对植入式可编程阀进行编程的方法的另 一示例的流程图;
107.图40是示出根据本发明的各方面的包括制动机构的可编程阀的另一例 的图;
108.图41是根据本发明的各方面的包括结合制动机构的磁电机的可编程阀 的另一个示例的局部截面透视图;
109.图42是图41中所示的阀的示例的平面图;
110.图43是根据本发明的各方面的类似于图41所示的阀的电机组件的另一 个示例的平面图;
111.图44a是沿图42中的线a
‑
a截取的图42中所示的阀的示例的截面图;
112.图44b是沿图42中的线b
‑
b截取的图42中所示的阀的示例的截面图;
113.图45是示出根据本发明的各方面的制动弹簧的另一示例的图;
114.图46a是图42所示的阀的示例的示意性截面图,其示出了处于锁定位 置的制动器;
115.图46b是图42所示的阀的示例的相应的示意性截面图,其示出了处于 解锁位置的制动器;
116.图47a是根据本发明的各方面的可编程阀的另一示例的平面图;
117.图47b是沿图47a中的线a
‑
a截取的图47中所示的可编程阀的截面图;
118.图48示出了根据本发明的各方面的结合制动机构的可编程阀的另一示 例;
119.图49是本公开的另一实施例的可植入阀组件的透视图;
120.图50是根据本公开的各方面的可植入阀组件的可编程阀的透视图;
121.图51是可编程阀的分解透视图;
122.图52是移除外包装以显示容纳在可编程阀内的部件的可编程阀的透视 图;
123.图53是可编程阀的另一透视图;
124.图54是可编程阀的透视截面图;
125.图55是可编程阀的截面图;
126.图56a是本公开实施例的用于阀装置的附连有磁屏蔽盖的编程器装置 的顶部透视图;
127.图56b是图56a所示的编程器装置的侧视图;
128.图56c是与编程器装置分开的磁屏蔽的透视图;
129.图56d是附连到编程器装置的磁屏蔽的底视图;
130.图57是没有磁屏蔽盖的编程器装置的底部透视图;
131.图58是编程器装置的顶视平面图;
132.图59是编程器装置的分解透视图;
133.图60a是本公开的实施例的用于阀装置的监测器装置的顶部透视图;
134.图60b是监测器装置的底部透视图;
135.图61是监测器装置的顶视图;
136.图62是监测器装置的分解透视图;
137.图63是监测器装置的截面图;
138.图64是监测器装置的电路板的顶部透视图;
139.图65是监测器装置的电路板的底部透视图;
140.图66是用于在阀装置上定位监测器装置和编程器装置的定位盘的透视 图;
141.图67是定位盘的顶视平面图;以及
142.图68是本公开的实施例的具有磁屏蔽的编程器装置、连接到电源线的 监测器装置以及设置在监测器装置下的定位盘的透视图。
具体实施方式
143.各方面和实施例涉及一种结合磁电机的阀组件,该磁电机配置为连续地 或以有限的增量增大或减小阀的工作压力。如下更详细讨论的,通过将转子 磁性地重新定位在阀
组件的壳内,可以调节阀元件的打开压力,从而增大或 减小通过阀组件的流体的流动。阀组件的某些实施例适于植入患有脑积水的 患者体内,并且可用于排出csf。
144.特别地,某些方面和实施例提供了一种外部和磁可编程阀,其结合具有 以下特征的磁电机和外部控制器。该阀配置为使得操作者(例如,医生)能 够连续地或以小的压力增量(例如,大约10mm h2o的增量)调节阀直至 达到约200mm h2o的压力,并且阀的“关闭”设置约为300
‑
400mm h2o。该 阀对环境中的非编程的外部磁场(诸如,3特斯拉mri的磁场)具有很强的 抵抗力,例如,使得当患者靠近mri机器或其他产生磁场的仪器(阀控制 器除外)时,阀的压力设置不会明显改变。在某些实施例中,阀配置为使得 操作者(例如,医生)能够使用除x射线之外的方法来验证阀的压力设置。 此外,根据某些实施例,阀控制器很小、非常便携并且是电池操作的。下面 更详细地讨论根据各个实施例的阀的这些和其他特征和配置。
145.参考图1a和图1b,示出了可植入分流阀组件100的一个示例,其包括 由泵送室110分开的两个阀200和300。在一个示例中,脑室导管120可以 连接到阀组件100的入口130,引流导管可以附连到连接器140并连接到阀 组件的出口150。泵送室110的降压(depression)泵送流体通过阀300朝向 出口150和引流导管。在被降压之后释放泵送室,以泵送流体通过阀200。 阀200是包括磁电机的外部可编程阀,如下更详细地讨论的。例如,第二阀 300可以是止回阀。在这种情况下,在通过可编程阀200之后,流体在离开 进入引流导管之前流过止回阀300。在一个示例中,可编程阀200操作以保 持阀组件100关闭,直到流体压力上升到阀的预定压力设置。通常,止回阀 300可以设置在低压,允许包括磁电机的可编程阀200的压力设置来控制通 过阀组件100的流体的流动。在其他示例中,第二阀300可以是重力启动阀, 其允许阀组件100自动调节以响应在患者的姿势改变(即,从水平(斜躺) 突然移动到竖直(直立)位置)时发生的csf静水压力的变化。特别地,为 了避免响应于压力变化的阀打开,这可能导致csf过度排出,阀组件100 可以包括与可编程阀200串联连接并在可编程阀200的出口侧上的重力启动 阀,如图1a和图1b所示,重力启动阀配置为当患者基本竖直时在较高压 力下打开。
146.鉴于本公开的益处,本领域技术人员将理解到,可以调节阀组件100的 各个实施例的长度、尺寸和形状。阀组件100的某些实施例可进一步包括用 于对流体和/或注射药剂或染料进行取样的储器或者预室或前室、电源开/关 装置、防虹吸或其他流量补偿装置,和/或另外的导管。当包括时,前室(图 1a和图1b中未示出)将连接在入口130和可编程阀200之间。根据某些实 施例,阀组件100可包括泵送室110、前室、第二阀300(例如可以是止回 阀或重力启动阀),以及可选的防虹吸装置(未示出)的组合。在其他实施 例中,可以省略这些部件中的一个或多个。例如,阀组件100可包括泵送室 110和第二阀300,而没有前室,如图1a和图1b所示。也可以或替代地省 略泵送室110。在这样的实施例中,在流体通过可编程阀200之后,流体流 过第二阀300。替代地,阀组件100可包括前室,具有或不具有泵送室110 或第二阀300。可以使用众所周知的方法将阀组件100手术植入患者体内。
147.图2示出了根据某些方面的可植入磁可编程阀200的一个示例的三维视 图。图3a和图3b示出了根据某些实施例的图2的可植入磁可编程阀200 的外部视图。图3a是平面图,图3b是端视图。阀200包括容纳阀的部件 的阀体202(也称为壳体)。阀200包括入口端口204和出口端口206。入 口端口204可以连接到近端(或流入)导管,并且出口端口206可以连接
到 远端或引流导管。在分流csf流体的阀组件的情况下,近端导管可以是脑室 导管120或腰椎导管。在此情况下,来自脑室的csf流体进入脑室导管或腰 椎导管并进入阀组件100的入口端口204。远端导管用作连接到连接器140 的引流导管以将流体引导到身体的远处位置(如心脏的右心房(va分流) 或腹膜腔(vp或lp分流)以进行引流。
148.阀体202可包括顶盖202a和底盖202b,底盖202b与顶盖202a配合以 形成适于植入人体的密封外壳。阀200的“顶部”是装置的在植入时朝向患者 的头皮取向的侧面。阀体202可以由任何生理上相容的材料制成。生理相容 材料的非限制性示例包括聚醚砜和硅氧烷。如本领域技术人员将理解的,阀 体202可以具有各种形状和尺寸,至少部分地取决于阀200内的部件的尺寸、 形状和布置。
149.阀200的各个方面和特征以及操作,包括磁电机的操作,将在下面参考 图2、图3a
‑
图3b和图4a
‑
图4c进行讨论。图4a是沿着图3a中的线a
‑
a 截取并示出了磁电机的某些部件的阀200的一个示例的截面图。图4b是沿 着图3a中的线b
‑
b截取的并示出磁电机的某些部件的图2和图3a
‑
图3b 的阀200的示例的三维截面图。图4c是沿着图3b中的线c
‑
c截取的并示 出磁电机的某些部件的图2和图3a
‑
图3b的阀200的示例的另一截面图。 图5是沿着图3a中的线a
‑
a截取的图2和3a
‑
图3b的阀200的示例的另 一截面图。
150.参考图2、图3a
‑
图3b和图4a
‑
图4c,根据某些实施例,阀200包括 通过弹簧400偏压抵靠阀座210的阀元件208。弹簧400可以包括例如拉伸 弹簧、压缩弹簧、螺旋弹簧或盘绕弹簧、扭转弹簧、板簧、片簧或悬臂弹簧。 下面更详细地讨论弹簧400的某些实施例。
151.例如,流体经由脑室导管进入阀200,并流过入口端口204,该入口端 口在其壳端部处终止于阀座210。流体(例如,csf)的压力在倾向于将阀 元件208从阀座210抬起的方向上推动阀元件208和弹簧400。阀元件208 和阀座210的表面一起限定孔,且该孔的尺寸或直径确定流体流过阀200的 速率和量。阀元件208优选地具有大于阀座210的直径,使得当阀元件208 靠在阀座210上时,孔基本上是关闭的。阀元件208被放置在孔的入口侧上, 并且偏压抵靠孔的圆形外围,保持其关闭直到入口室中的csf压力超过预选 的弹出压力。术语“弹出压力”是指阀的打开压力,并且通常是比工作压力稍 高的压力,并且当球已经位于座中时需要克服惯性。术语“工作压力”也可以 称为“操作压力”,并且是流体流过阀200时阀的压力。关闭压力是流体通过 阀的流动停止的阀的压力。
152.阀元件208可以是球形、圆锥形、圆柱形或其它合适的形状。在图4c 和图5所示的示例中,阀元件208是球形的球。球形的球和/或阀座210可以 由任何适当的材料制成,包括例如合成红宝石或蓝宝石。阀座210提供互补 表面,诸如用于球形阀元件的截头圆锥形表面,使得在阀200的关闭位置, 在阀座210内阀元件208的安置导致流体紧密密封。这样的阀的压力设置(例 如打开压力)通过改变阀元件208抵靠阀座210的偏压力来调节。在一个示 例中,阀元件208和阀座210可以被压配合到壳体202中,并且,一旦达到 初始压力设置,通过摩擦保持在适当位置。在该配置的一个示例中,阀元件 208包括红宝石球,且阀座210也由红宝石制成。
153.根据一个实施例,使用磁电机实现弹簧400抵靠阀元件208的偏压,该 磁电机连续地或以有限的增量增大或减小阀200的工作压力。根据某些实施 例,磁电机包括定子528和转子510,转子510响应于外部磁控制场而相对 于定子528旋转。在一个示例中,转子510围绕中心旋转轴线214旋转。下 面更详细地讨论磁电机的实施例的配置和操作。
154.参考图2、图4a
‑
图4c和图5,根据某些实施例,转子510包括布置在 转子壳514中的多个转子磁体元件512。图4c和图5示出了多个转子磁体 元件512,它们布置成圆圈并设置在转子壳514内。因此,转子壳514包括 大致圆形的通道522,转子磁体元件512容纳在该通道中。在一个示例中, 转子磁体元件512是永磁体,每个都具有南极和北极。转子磁体元件512大 致布置成圆圈,如图4c所示,具有交替的极性,使得无论从顶部(如图4c 中)或底部观察,南极和北极在每个转子磁体元件之间交替。因此,在任何 一个角位置处,暴露在元件顶表面上的极与暴露在底表面上的极相反。转子 磁体元件512可以固定地安装到转子壳514,转子壳514可以用作磁体引导 件以容纳和引导转子磁体元件512的旋转。在图2、图4c和图5中,转子 磁体元件512示出为圆盘;然而,应当理解到,转子磁体元件512不需要是 盘形的,并且可以具有任何形状,诸如但不限于长方形、正方形、矩形、六 边形、自由形状等。优选地,所有转子磁体元件512是大致相同的尺寸或大 致相同的磁强度,即使它们的尺寸变化以确保转子510的平稳旋转。根据一 个实施例,转子510包括布置成圆圈的十二个转子磁体元件512,如图4c 所示的。根据另一实施例,转子510包括布置成圆圈的十个转子磁体元件 512,如下进一步讨论的。在其他示例中,转子510可包括其他数量的转子 磁体元件512,并且在此公开的可编程阀的实施例不限于包括十个或十二个 转子磁体元件。
155.根据某些实施例,除了转子磁体元件512之外,转子510还可包括一个 或多个另外的参考磁体元件(也称为定位磁体)524,如图4a和图5所示。 参考磁体元件524可以由如在此所述的压力读取器读取,或者参考磁体元件 524可以用作定位磁体以定向指示器磁体,例如下面参考图32所讨论的指示 器磁体552。参考磁体元件524可以放置在一个或多个转子磁体元件512的 顶部上,并且可以用于允许医生例如使用外部磁传感器(例如,霍尔传感器) 确定阀200的压力设置,不需要x射线或其他成像技术,如下进一步讨论的。
156.转子510配置为响应于作用于定子528的施加的外部磁场而围绕转子轴 线214旋转。转子510因此还可以包括邻近转子壳514的内圆周布置的轴承 环516,如图4a和图4b所示,以允许转子壳514旋转。轴承环516可以由 例如合成红宝石制成。在某些示例中,磁电机包括两个轴承环516,即上轴 承环和下轴承环,如图4a和图4b所示。然而,在其他示例中,可以省略 上轴承环。在此情况下,转子510可以在其旋转时在下轴承环516上倾斜。 在某些示例中,该倾斜可以有利于增大磁电机对由外来环境磁场的调节的抗 性。在其他示例中,下轴承环516可以制造得足够宽,以避免转子510在轴 承环上旋转时的任何倾斜。
157.根据一个实施例,来自外部磁场的磁脉冲被用于选择性地磁化定子528, 定子528作用于磁转子上并因此控制转子510的运动。外部磁场可以由例如 放置在阀组件附近的磁力线圈或永磁体产生,如下更详细地讨论的。定子528 可以由软磁材料制成,通过施加外部磁场,所述软磁材料可以被选择性地磁 化,且其磁极性可以被选择性地控制。例如,定子528可以由镍
‑
铁合金(例 如,具有大约72
‑
83%的镍)制成。通过控制定子528的磁化和磁极性,当 转子磁体元件512响应定子528的变化的磁化和磁极性时,可以使转子510 以受控制的方式旋转,如下进一步讨论的。
158.阀200配置为使得转子510的旋转控制弹簧400以调节阀元件208抵靠 阀座210的偏压,从而调节孔的尺寸并控制流体通过阀200的流动。在一个 实施例中,阀200包括与弹簧400接合的凸轮212,如图2、图4c和图5所 示。在所示的示例中,凸轮212与转子壳514成一体,从而避免了对单独的 凸轮元件的需要。在其他实施例中;然而,凸轮可以联接到转子
510并且定 位成与弹簧400接触,使得转子510的旋转引起凸轮212的移动,这进而调 节弹簧400抵靠阀元件208的张力。例如,凸轮212可以经由中心轴线520 附连到转子壳514,使得转子壳514和凸轮212可以围绕中心轴线214一起 旋转。如本文所使用的,术语“凸轮”指的是可以附连到转子的单独的凸轮元 件或指的是用作凸轮的转子壳514,如在其中凸轮与转子壳成一体的所示实 施例中。
159.对于阀组件100的某些应用(例如,诸如脑积水的治疗),阀的压力范 围可以是,例如,大约0
‑
200mm h2o或0
‑
400mm h2o,该压力范围是非常 低的压力范围。此外,可能希望在该范围内进行小的压力变化。然而,制造 以下阀组件可能是不可行的(由于制造限制等),在所述阀组件中凸轮212 能够进行非常微小的运动,例如,几微米的量级。因此,为了适应低压范围 和压力的小增量变化,可能需要非常柔软的弹簧。通常,为了获得足够柔软 的弹簧,弹簧400将非常长。然而,在可植入壳体内容纳非常长的柔软的弹 簧可能带来挑战。因此,各方面和实施例涉及产生杠杆或“齿轮减速”效果的 弹簧配置,使得凸轮212的合理(即,在标准制造能力内)运动可以被转换 成在低压设置中的非常小的调节。特别地,某些实施例包括悬臂弹簧配置, 例如,如图6a所示。
160.图6a、图6b、图6c和图6d示出了可编程阀200的部分的视图,示出 了凸轮212和偏压抵靠阀元件208的弹簧400。图6a和图6b示出了凸轮 212处于抵抗偏压弹簧400的最小张力的位置,而图6c示出了处于抵抗偏 压弹簧400的最大张力位置的凸轮212。图6d示出了弹簧400的一个示例 的放大视图。在图6d中示出了弹簧400,其中阀元件208安置在阀座210 中。在该示例中,弹簧400是悬臂弹簧,并且包括与凸轮212直接或间接接 触的第一弹簧臂410以及偏压抵靠阀元件208的悬臂420。第一弹簧臂410 和悬臂420两者都从支点430(或弹簧400的固定附连点)沿相同方向延伸。 因此,悬臂420具有位于支点430处的固定端和靠在阀元件208上的自由端 422,如图6a和图6c所示。类似地,第一弹簧臂410具有在支点430处的 固定端和与凸轮212接合的自由端。在某些示例中,悬臂420可以比弹簧臂 410长。在所示的示例中,弹簧臂410是“弯曲的”,包括拐点412。相对于 第一弹簧臂是直的示例,该配置允许减小弹簧400的整体尺寸。凸轮212的 旋转引起压力抵抗与凸轮接触的弹簧臂410,改变弹簧400中的张力。该压 力通过弹簧结构扩散和减小,使得由悬臂420施加抵靠阀元件208所导致的 压力可以非常低,并且特别地,可以在期望的范围内(例如,如上所述的0
‑
200 mm h2o),而不会对凸轮212的旋转运动带来困难或不可行的约束。通过 适当地选择两个臂410和420的相对长度,以及每个臂的宽度,可以实现杠 杆或齿轮减速机构的等同。因此,使用短的双臂弹簧400,而不是传统的长 弹簧,可以实现足够柔软的弹簧以提供某些应用所需的低压力(例如,0
‑
200 mm h2o)。
161.弹簧400可以具有各种不同的形状和配置,不限于图6a
‑
图6d中所示 的示例。例如,图7a和图7b示出了板簧460。图7a仅示出了板簧,图7b 示出了安装在阀中并偏压抵靠阀元件208的弹簧。板簧460包括与凸轮212 直接或间接接触的第一弹簧臂462和偏压抵靠阀元件208的悬臂464。在该 示例中,悬臂464包括靠在阀元件208上的圆形端部464a。第一弹簧臂462 和悬臂464都是平坦的并且从支点430延伸。凸轮212未示出在图7b中。
162.图8a和图8b示出了u形悬臂弹簧480的示例。图8a仅示出了u形 弹簧480。图8b是可编程阀200的一部分示例的截面图,示出了安装在阀 200中的u形弹簧480。u形弹簧480包括与凸轮212直接或间接接触的第 一弹簧臂482和偏压抵靠阀元件208的悬臂484。悬臂484具
有靠在阀元件 208上的自由端486。第一弹簧臂482和悬臂484通过由柱488支撑的u形 部分483连接。在一些实施例中,u形部分483被弹簧偏压在柱488周围, 因此u形部分483与柱488摩擦接合。
163.类似于以上讨论的图6b和图6c,图8c和图8d示出了对应于可编程 阀200的不同压力设置而定位的u形弹簧480的示例。图8c示出了当凸轮 212定向成使得可编程阀200设置在最低压力设置时的u形弹簧480。图8d 示出了当凸轮212定向成使得可编程阀200设置在最高压力设置时的u形弹 簧480。
164.图9a示出了悬臂弹簧490的另一个示例,其具有第一弹簧臂492和悬 臂弹簧臂494,第一弹簧臂配置为与凸轮212直接或间接接触,悬臂弹簧臂 偏压抵靠阀元件208。悬臂弹簧臂494具有靠在阀元件208上的自由端496。 在该示例中,第一弹簧臂492和悬臂弹簧臂494例如通过焊接固定在柱498 上。图9b示出了在可编程阀200中的图9a的弹簧490的示例。柱498配 置为在两个红宝石轴承491和493上旋转。一个红宝石轴承491位于柱498 的上部部分处,第二红宝石轴承493位于柱498的下部部分处。红宝石轴承 491、493允许柱498相对于阀体202枢转。
165.如本领域技术人员将理解的,鉴于本公开的益处,弹簧400除了上面描 述的和附图中示出的那些之外还可以具有其他配置。
166.在某些示例中,当凸轮212旋转时,抵靠弹簧400施加的力在从最小力 到最大力的范围内以微小的增量调节或连续地调节。如图6c所示,当凸轮 212处于由凸轮212施加的抵靠弹簧400的最大压力的位置时,悬臂420朝 向阀元件208移动。因此,阀200的压力设置对于凸轮212的该位置是最高 的。在一个示例中,由凸轮212施加的抵靠弹簧400的压力以及因此弹簧400 中的张力,随着凸轮212的顺时针旋转而增大,如箭头216所示的。但是, 鉴于本公开的益处,本领域技术人员将理解到,转子510、凸轮212和弹簧 400可替代地配置为使得转子510的逆时针旋转增大弹簧400中的张力。
167.如上所述,阀元件208和阀座210形成孔,流体通过该孔流动。入口端 口204可以定向成使得流体在垂直于转子510的中心轴线的方向上进入孔 (或者,换句话说,推动阀元件)。入口端口204也可以定向成使得流体在 垂直于转子510的中心轴线214的方向上进入孔(或推动阀元件)。在某些 方面,当入口端口204定向成使得流体沿垂直于转子510的中心轴线214的 方向进入孔中时,凸轮212直接或间接地产生弹簧400的水平位移,例如, 如图6a和图6b所示的。
168.本文中公开的阀组件100的实施例中的凸轮212,在任何配置中,在与 弹簧400接合的表面中可以具有恒定或线性斜坡、分段线性斜坡、非线性斜 坡以及这样的斜坡的组合。如果凸轮212具有线性斜坡,则凸轮212的旋转 以线性方式增大或减小压力设置。如果凸轮212具有非线性斜坡,则压力例 如可以在旋转结束时增大更多。这允许最初具有微小的压力增量的可能性, 例如,在0和200mm h2o之间,并且之后具有更大的压力增量。例如,图 6a和图6b中所示的凸轮212包括具有非线性斜坡的表面,该表面与弹簧 400的第一臂410接合。具体地,凸轮212包括突起218,其改变在凸轮212 旋转时由凸轮212施加在弹簧400上的压力的增大速率。因此,在某些示例 中,由凸轮212施加在弹簧400上的力在凸轮212的大部分旋转周期内以基 本上线性的方式增大;然而,在循环结束时,由于突起218的影响,力的增 大更加剧烈。
169.在某些应用中,例如,在儿童脑积水的治疗中,可能需要能够在使用一 段时间后确定患者是否仍然需要阀,或者脑积水是否已经停止并且不是更长 时间需要分流。例如,取决于脑积水的原因,在使用植入式分流阀组件100 几年后,患者可能不再需要阀。测试以确定患者是否仍需要阀的一种方法是 显著增大弹簧400对阀元件208的压力,从而几乎完全关闭阀200,并在此 后观察患者的状况。因此,其中阶梯压力增大在弹簧400和凸轮212的最大 压力位置处或附近显著更大的上述配置可以有利地允许执行该测试。如果在 阀200的压力设置显著增大之后患者的状况恶化,则通过旋转凸轮212可以 简单地再次降低压力设置。因此,该配置为阀200提供了安全的准关闭设置, 而没有使阀200完全关闭或移除。
170.根据某些示例,磁电机可以包括转子止动件或凸轮止动件220,其防止 凸轮212的360度旋转,从而防止阀能够在一步内从完全打开立即转换到完 全关闭,或反之亦然。凸轮212可以顺时针或逆时针旋转到由凸轮止动件220 设置的位置,然后必须沿相反方向旋转。因此,需要凸轮212的完全旋转以 使阀从完全打开转换到完全关闭,或反之亦然,而不是仅是一小步或递增的 旋转。
171.在某些示例中,在制造阀组件100之后,通常需要校准装置来调节压力 设置。例如,在某些实施例中,弹簧400可以配置为使得它相对于每步是线 性的,也就是说,随着凸轮212的每个旋转步,弹簧400被张紧,使得阀200 的压力增大了x量,并且这对于每个额外的旋转步都是如此。因此,必要的 是,校准装置以将凸轮212设置在给定位置,并将弹簧400预张紧到该位置 的适当压力。因此,在组装阀200之后并且在校准期间,可能有氮气流(或 一些其他流体)通过阀组件。
172.图10a和图10b示意性地示出了磁转子510的示例,该磁转子510包 括布置成圆圈的十个转子磁体元件512,如上所述,并且配置为使得顺时针 旋转增大可编程阀200的压力设置。图10a示出了转子510和弹簧400处于 对应于阀200的最低压力设置的弹簧上的最小张力的位置。图10b示出了从 图10a中所示的位置顺时针旋转到弹簧上的最大张力的位置之后的转子510 和弹簧400,该弹簧上的最大张力的位置对应于阀200的最高压力设置。如 上所述,转子510可以通过多个增量步旋转,示出在518处,每步对应于阀 200的压力设置的限定的变化。如上所述,转子510可以包括凸轮止动件220, 其可以防止凸轮212的360度旋转,从而防止阀在一步内立即从完全打开转 换到完全关闭,反之亦然。在一个示例中,示意性地示于图10a和图10b 中,在阀200的最大和最小压力设置下,凸轮止动件220邻接壳体止动件222。 凸轮止动件220和壳体止动件222的尺寸和布置使得凸轮止动件不能通过壳 体止动件,从而防止凸轮沿相同方向进一步旋转。因此,当转子510处于阀 200的最小压力设置位置时(图10a),转子必须顺时针旋转,从而逐渐增 大阀的压力设置。通过凸轮止动件220和壳体止动件222防止逆时针旋转, 该逆时针旋转会将阀200在一步内从最小压力设置转换到最大压力设置。类 似地,当转子510到达对应于阀200的最大压力设置(图10b)的位置时, 通过凸轮止动件220和壳体止动件222防止凸轮的进一步顺时针旋转,使得 转子必须逆时针旋转,从而逐渐减小阀的压力设置。
173.还如图10a和图10b示意性地所示的,在某些示例中,阀200可包括 一对不透射线的标记,即转子标记224和壳体标记226,其可以在x射线中 被看到并指示转子510的位置,以及因此指示阀200的压力设置。在一个示 例中,一对不透射线标记224和226定位成使得在阀的最低压力设置下,两 个标记与凸轮的中心对准,如图10a所示。壳体标记226固定在
阀200的壳 体中并且不随转子510旋转,而转子标记224随凸轮/转子旋转。
174.在一些实施例中,不透射线标记224、226包括钽。在一些实施例中, 不透射线标记224、226包括钽球和/或钽珠。
175.如上所述,由于阀组件100的实施例包括磁致动转子510,所以可以通 过将外部调节装置(在此也称为阀编程器)定位在植入阀200的附近但在身 体的外部,来调节植入式可编程阀200的压力设置。阀编程器包括磁场发生 器,以及各种控制和输入/输出(i/o)部件,以允许用户(例如,医生)控 制阀编程器来设置和可选地读取植入式可编程阀200的压力设置。在某些实 施例中,磁场发生器可以包括电磁体的布置,如下参考图11a、图13、图 15、图16a
‑
图16h,图17和图18a
‑
图18h所讨论的。在其他实施例中, 磁场发生器可以包括一个或多个永磁体,并且阀编程器可以是电池操作的, 如下参考图11b、图11c、图19
‑
图22、图23a
‑
图23e和图24所进一步讨 论的。
176.图11a示出了包括发送器头610的阀编程器600,发送器头610可以放 置在患者头部上方,在植入式磁可编程阀200上方的位置处。发送器头610 包括磁场发生器,如下进一步讨论的,所述磁场发生器施加磁脉冲以选择性 地磁化定子528,从而引起转子510的旋转。流体从脑室流过,通过脑室导 管120,通过植入阀,进入连接到连接器140的远端导管,其然后在身体的 远处位置(例如心脏的右心房或腹膜腔)排出流体。阀编程器600可以通过 发送器头610发送磁信号以影响转子510的旋转。控制装置620可以用于控 制发送器头610以产生磁脉冲,如下进一步讨论的,并且可以例如经由通信 链路630(诸如电缆或无线链路)联接到发送器头610。
177.参考图12,根据某些实施例,控制装置620可包括各种部件或模块,以 使用户能够控制调节装置以改变可植入阀200的压力设置,并确定阀的当前 压力设置。控制装置620可以包括允许用户与控制装置交互的用户界面622。 用户界面可以包括一个或多个显示器或输入装置,例如输入键、触摸屏等, 以允许用户查看和调节阀200的压力设置。在某些实施例中,控制装置620 还可以包括与发送器头610通信的驱动电路624。控制器632可用于向驱动 电路624提供指令,以基于例如经由用户界面622接收的指令以预定电流、 持续时间、周期等驱动发送器头610中的磁场发生器。控制器632还可以从 设置检测器626接收输入,并且响应于从设置检测器接收的信息,控制用户 界面622以显示阀压力设置。控制器632可以被预编程,例如,通过存储在 计算机可读介质或装置(例如硬盘驱动器,光盘读取器可读的光盘,闪存设 备等)上的计算机指令。控制装置620可以被操作以允许用户通过可编程控 制器632调节阀200并确定阀200的设置。在一些实施例中,控制装置620 还可以包括通信接口628,其可以用于将控制装置620连接到另一装置,例 如联网计算机的应用服务器,用于类似地控制或以其他方式操作阀200。
178.图11b示出了外部调节装置640的另一实施例,其包括单个集成装置, 而不是如图11a的示例中的单独的发送器头610和控制装置620。根据一个 示例,外部调节装置640包括产生磁场的永久北极和南极磁体,其当旋转时, 磁场选择性地磁化定子528,从而引起转子510的旋转。
179.图11c示出了外部阀读取装置的示例,其包括阀读取装置(压力读取器) 660,用于在确定阀200的压力设置时检测转子510的位置方面。在所示的 示例中,压力读取器660包括机械罗盘;然而,在其他示例中,该机构可以 是电子的,例如包括磁位置传感器。压力读
取器的实施例在下面更详细地讨 论。在某些示例中,压力读取器可以结合到图11a的阀编程器600的实施例 中,并且配置为当发送器头610中的磁场发生器关闭时,确定转子510的位 置方面,或者以其他方式读取阀200的压力设置。
180.根据某些实施例,可以通过将脉冲磁场施加到如图13、图14、图15、 图16a
‑
图16h、图17和图18a
‑
图18h示意性所示的可编程分流阀附近来 进行阀压力调节。发送器头610放置在植入阀200附近。在一个实施例中, 发送器头610包含四个电磁体,在图13中示意性地示出为线圈1、2、3和4, 其由外部控制装置620单独控制(例如,经由如上所述的驱动电路624)。 在图13和图14中所示的示例中并且如上所述,植入阀200的可磁操作的电 机包括转子510,其具有在转子壳514的通道522中以交替极性布置的十二 个转子磁体元件512,如上所述。电机还包括定位在转子510下方的定子528。 在所示的示例中,定子528具有x形状。因此,在该示例中,发送器头610 中的四个电磁体(也称为线圈)被定位成使得线圈1和3以及线圈2和4比 图13中所示的线圈1和4以及线圈2和3更接近彼此。这四个电磁体还可 以与中心轴530等距地定位。当发送器头610正确地定位在植入阀200上方 时,电磁体的中心轴线530与转子510的旋转轴线214重合,每个电磁体在 与定子528的一个臂相同的角度位置处对准,如图13所示。但是,这样的 对准方式不一定是准确的。实施例容许对准误差,这可能是不可避免的,这 是由于用户无法看到转子510或定子528以及这些元件相对于外部电磁体的 尺寸的小尺寸。
181.电磁体1、2、3和4中的每一个可以被激励以具有面向定子528的北极 性或南极性,或者每个都可以保持断开。转子510在期望的方向上并通过期 望的角度的运动是通过按照图15(顺时针旋转)或图17(逆时针旋转)中 表格所示的序列激励电磁体来实现的,其进而磁化定子528,其然后吸引或 排斥转子磁体元件512(取决于极性),从而引起转子510的旋转。
182.例如,参考图15和图16a
‑
图16h,顺时针运动是通过首先将两个电磁 体1和2激励到南极性,并使电磁体3和4断开(步骤1)来实现的。在下 一步骤(步骤2)中,电磁体1和2被断开,电磁体3和4都被激励到南极 性。在步骤3中,电磁体1和2都被激励到北极性,而电磁体3和4保持断 开,并且在步骤4中,电磁体1和2保持断开,而电磁体3和4被激励到北 极性。在第四步骤之后,重复序列。
183.转子510示出为在图16b中处于在第一步骤之后到达的位置处(转子磁 体元件512的极性对应于底表面的极性)。如图16a和图16b所示,激励 电磁体1和2使得南极朝向定子528并且面向彼此,使定子528被磁化为具 有北极性。因此,现在北磁化的定子528将具有南极性的那些转子磁体元件 512拉向其自身,同时排斥具有北极性的那些转子磁体元件512。结果是转 子510的顺时针旋转,如箭头532所示。转子510的旋转可以通过图16a
‑ꢀ
图16h通过观察参考标记526的变化位置进一步看到。类似地,在步骤2 中,当电磁体3和4激励使得南极朝向定子528并且面向彼此时,定子528 再次被磁化为具有北极性,并且作用在转子磁体元件512上以引起转子510 的进一步顺时针旋转,如图16c和图16d中所示的。图16e
‑
图16h示出了 对应于图15的步骤3和4的操作。特别地,激励电磁体1和2使得北极朝 向定子528,并且面向彼此(步骤3),使定子528被磁化为具有南极性, 如图16e所示。因此,现在南磁化的定子528将具有北极性的那些转子磁体 元件512拉向自身,同时排斥具有南极的那些转子磁体元件512。结果是转 子510的进一步顺时针旋转,如箭头532所示并且如图16f所
示。类似地, 在步骤4中,当电磁体3和4激励使得北极朝向定子528并且面向彼此时, 定子528再次被磁化为具有南极性,并作用在转子磁体元件512上以引起转 子510的进一步顺时针旋转,如图16g和图16h所示的。
184.转子510的运动主要受位于转子510下方并靠近转子510的转子磁体元 件512的定子528的影响。因此,来自电磁体1、2、3和4的施加的外部磁 场不直接导致转子510的运动,而是控制定子528的磁化和极性,其然后作 用在转子磁体元件512上以引起转子510的旋转。转子磁体元件512的数量 和定子528的形状被选择为满足两个条件。首先,当一对径向相对的定子臂 与一对径向相对的转子磁体元件512对准时(例如,参考图16c,定子臂534a 和534b分别与转子磁体元件512a和512b对准),另两个定子臂分别在两 个转子磁体元件512之间的中间交错,例如,如图16c所示。第二,每对径 向相对的转子磁体元件(例如,图16c中的512a和512b)具有相同的磁极 性。在操作中,控制装置620激励最靠近在两个转子磁体元件512之间交错 的一对定子臂的电磁体,从而使转子510移动通过与一个转子磁体元件512 的宽度的一半相对应的角度。如上所述,在一个示例中,在转子510的一个 完整旋转中存在十二个磁转子元件512并因此具有24个角度增量。此外, 该配置,其中径向相对的转子磁体元件512具有相同的磁极性并且径向相对 的电磁体也被激励以具有面向定子528的相同的磁极性(例如,图16a中的 南),有利地导致磁可编程阀对其他(非编程)磁场具有高度抗性。由自然 现象或与控制装置620无关的外部装置(例如,mri机器)产生的随机施加 的磁场极不太可能在定子528的相对端处施加两个相同的极(例如,两个极 为北或南)。相反,外部的非编程场更可能具有并排的北极和南极,这将不 能均匀地磁化定子528,这是受控操作所需的(如图16a
‑
图16h所示)并且 因此将不能引起转子500的不希望的或意外的旋转。相反,传统的磁转子, 例如美国专利号4,615,691中公开的转子,该转子包括径向相对的永磁体, 具有相反的磁极性(如美国专利号4,615,691的图9所示的),以及十字形 定子,其被磁化为一半具有一个极性而另一半具有相反极性,与在此公开的 定子528不同,其响应于外部编程场而被均匀地磁化为具有单个磁极性,如 上所述。因此,传统装置更容易受到不希望的旋转,并且因此由于外部非编 程磁场而不希望地调节阀的压力设置。
185.如上所述,在一个示例中,转子510包括十二个转子磁元件512;然而, 在其他示例中,转子510的尺寸和设计可以包括不同数量的转子磁体元件 512(例如,八个),条件是径向相对的元件具有相同的磁极性。此外,在 转子510配置为由不同配置的阀编程器操作的其他示例中,如下更详细地讨 论的,转子的尺寸和设计可以适应多个转子磁体元件512(例如,十个), 使得径向相对的转子磁体元件具有相反的极性。
186.可以启动类似的操作以引起转子510的逆时针旋转。例如,图17是类 似于图15中所示的表格,示出了图13的装置的电磁体的激励序列的示例以 实现转子510的逆时针旋转。图18a
‑
图18h示出了电磁体和定子528的磁 极性,以及转子510的所产生运动,对应于图17所示的序列。
187.因此,参考图17和图18a
‑
图18h,通过首先将两个电磁体1和2激励 为北极性,并使电磁体3和4断开(步骤1)来实现逆时针运动。在下一步 骤(步骤2)中,电磁体1和2被断开,电磁体3和4都被激励为南极性。 图18a
‑
图18d对应于步骤1和2,图18b示出了转子510处于步骤1之后 到达的位置,图18d示出了转子510处于步骤2之后到达的位置。如图18a
‑ꢀ
图18b所示,将电磁体1和2激励为北极性使得定子528被磁化为南极性, 并且如箭头536所示,通
过作用在转子磁体元件512上而引起转子510的逆 时针旋转,如上所述。类似地,如图18c
‑
图18d所示,将电磁体3和4激 励为南极性使得定子528被磁化为北极性,并且引起转子510的进一步逆时 针旋转,如箭头536所示。在步骤3中,电磁体1和2是两者均激励为南极, 而电磁体3和4保持断开,并且在步骤4中,电磁体1和2保持断开,而电 磁体3和4激励为北极。图18e
‑
图18h示出了对应于图17的步骤3和4的 操作。特别地,激励电磁体1和2使得南极朝向定子528并且面向彼此(步 骤3),使定子528被磁化为具有北极性,如图18e所示。因此,现在南磁 化的定子528将具有北极性的那些转子磁体元件512拉向自身,同时排斥具 有南极性的那些转子磁体元件512。结果是转子510的进一步逆时针旋转, 如箭头536所示并且如图18f所示。类似地,在步骤4中,当电磁体2和3 激励使得北极朝向定子528并且面向彼此时,定子528被磁化为具有南极性, 并作用在转子磁体元件512上以进一步引起转子510的逆时针旋转,如图 18g和图18h所示。在第四步之后,重复序列。如上所述,每个步骤导致对 应于一个转子磁体元件512的宽度的一半的转子510的角运动的增量。
188.尽管上面参考包括十二个转子磁体元件512的转子讨论了磁电机和发送 器头610的操作,但是鉴于本公开的益处,本领域技术人员将理解到,对于 具有不同数量的转子磁体元件的转子,例如十个转子磁体元件,发送器头610 及其电磁体的操作可以进行调节。
189.因此,使用具有如上讨论的磁电机的植入阀200,与包括控制装置620 和具有四个电磁体1、2、3和4的发送器头610的外部控制器一起,可植入 阀的压力设置可以以小增量进行无创地控制。可以设计和校准凸轮212的配 置和弹簧400中的张力,使得转子510的每个角度增量产生阀的压力设置中 明确限定的选定的变化(例如,10mm h2o)。在一个示例中,控制装置620 可以配置为允许用户输入阀的期望压力设置,然后使用图15和图17中所示 的序列之一自动激活发送器头610,例如,以实现所选择的压力设置。
190.在一个示例中,为了确保阀200的精确压力设置,控制装置620可以配 置为首先启动图17的逆时针旋转序列以将阀200设置成其完全打开位置, 然后启动图15的顺时针旋转序列以将阀200设置成由用户输入的选定的压 力设置。根据某些示例,当逆时针旋转序列被启动时,阀编程器配置为致动 转子510以旋转通过足够的逆时针步数,使得转子将被定位成使得阀200具 有其最低压力设置。如上所述,凸轮止动件220和壳体止动件222的存在防 止转子继续旋转超过最小压力设置位置。在编程器停止逆时针旋转序列之 后,它可以从已知位置(对应于最小压力设置且凸轮止动件220邻接壳体止 动件222的位置)开始顺时针序列。阀编程器700可以致动转子510以旋转 通过选定顺时针步数,以便将阀200编程为用户选定的压力设置。
191.尽管上面讨论的示例使用转子510的顺时针旋转对阀200的压力设置进 行编程(以及逆时针旋转以将转子设置在从其开始编程序列的已知位置), 但是本领域技术人员将认识到,鉴于本公开内容的益处,系统(阀以及编程 器)可以替代地配置为用于相反的布置,即使用转子的逆时针旋转对阀的压 力设置进行编程(以及顺时针旋转以将转子设置在从其开始编程序列的已知 位置)。
192.在某些情况下,外部阀编程器可以优选地是电池操作的。诸如包括电磁 体的发送器头610的发送器头可能需要太多的电力(以激励电磁体)而不能 是电池供电的。因此,其他方面和实施例涉及阀编程器,例如图11b中所示 的示例性阀编程器,其结合了永磁体以及小型dc电机,例如步进电机,例 如以提供可以与植入阀200一起使用并且可以由电池供
电的非常低功率的控 制器。
193.参考图19,示出了结合了永磁体而不是电磁体的阀编程器700的一个示 例的框图。阀编程器700包括控制器702、用户界面704、电池706、步进电 机708和永磁体组件710。这些部件可以一起封装在单个壳体中,该壳体可 以保持在植入阀200附近以控制和调节阀200的压力设置,例如,如图11b 所示。替代地,某些部件,例如永磁体组件710、步进电机708和电池706 可以封装在一起,可选地包括可以执行控制器702的全部或部分功能的控制 器,以及用户界面704(可选地具有可以执行控制器702的全部或一些功能 的控制器)可以单独封装以允许用户在操作阀编程器700时更方便地查看用 户界面704。例如,用户界面704可以实现为在例如智能电话或台式计算机 的移动计算装置上运行的应用程序,其允许用户查看阀200的压力设置并输 入命令(诸如选择阀200的期望压力设置)。用户界面704可以例如从控制 器702接收压力设置信息,并且将用户命令发送到阀编程器700的其他可选 地单独封装的部件,例如发送到控制器702或者发送到步进电机708以致动 永磁体组件710,从而调节阀200的压力设置。
194.图20a是根据某些实施例的可用在阀编程器700中的永磁体组件710a 的一个示例的图示。永磁体组件710a包括壳体712和可旋转磁体引导件714, 可旋转磁体引导件714设置在壳体712内并且配置为围绕中心旋转轴线716 旋转。在一个示例中,步进电机708在控制器702的控制下驱动磁体引导件 714的旋转。磁引导件714的旋转可以是连续的或一系列的离散步。多个永 磁体安装到磁体引导件714上或内部,使得永磁体与磁体引导件714一起旋 转。在图20a所示的示例中,存在四个永磁体722、724、726和728。两个 径向相对的永磁体具有相同的磁极性。例如,如图20a所示,永磁体722 和724具有北极性,而永磁体726和728具有南极性。例如,该配置适合于 控制具有十二个转子磁体元件512的转子510。
195.本领域技术人员将认识到,可以对永磁体组件710进行各种修改。例如, 尽管图20a中示出了四个永磁体722、724、726和728为圆形的,但是它们 可以具有其他形状,例如但不限于矩形、椭圆形、条形、棒形等。另外,可 能存在多于或少于四个的永磁体。例如,图20b示出了其中永磁体组件710b 包括相反磁极性的一对永磁体732和734的配置。该配置可适用于控制具有 十个转子磁体元件512而不是例如十二个转子磁体元件的转子510。在另一 个示例中,永磁体组件710b可以包括单个径向地(diametrically)磁化的永 磁体,而不是两个相反极性的单独磁体。还应当认识到,永磁体722、724、 726、728、732或734中的任何一个可以由一组相同磁极性的多个永磁体而 不是单个永磁体组成。由步进电机708致动,磁体引导件714以及因此多个 永磁体722、724、726和728或者732和734围绕旋转轴线716旋转。当阀 编程器700放置在在植入阀200中时,永磁体组件710磁化定子528。磁体 引导件714的旋转改变定子528的磁化,从而引起转子510的运动,类似于 上面关于发送器头610所讨论的。
196.图21a
‑
图21e示意性地示出了,响应于针对包括图20a的永磁体组件 710a的阀编程器700的示例的磁体引导件714的旋转,定子528的变化磁极 性以及转子510的所得旋转的示例。在图21a
‑
图21e中,永磁体组件710a 由环718示意性地表示。例如,如图21a所示,环718具有四个磁象限,每 个磁极性两个(730a和730c是北,730b和730d是南),径向相对的象限 具有相同的磁极性,对应于图20a所示的四个永磁体722、724、726和728。 环718包括控制器参考标记736,其旨在示出磁引导件714通过图21a
‑
e的 旋转且并不一定对应于物理结
构。类似地,转子参考标记538示出在转子磁 体元件512中的一个上,以示出转子510通过图21a
‑
图21e的旋转。
197.参考图21a,在第一位置,具有南极性的两个相对定位的永磁体(图20a 中的永磁体726和728)对应于环718的象限730b和730d,使得它们最接 近或对准的相对的定子臂534c和534d被磁化为北。类似地,具有北极性的 另外两个相反定位的永磁体(图20a中的永磁体722和724)对应于环718 的象限730a和730c,使得它们最接近或对准的其他两个相对的定子臂534a 和534b被磁化为南。现在被磁化为南的定子臂534a和534b在相反磁极性 的两个转子磁体元件之间交错,因此拉动北极化的转子磁体元件512a和 512b,同时排斥南极化的转子磁体元件512c和512d,导致转子510旋转到 图21b所示的位置。转子510旋转通过对应于一个转子磁体元件512的宽度 的一半的角度,如由图21a至图21b中的转子参考标记538的相对位移所 示的。转子510的旋转的度数对应于环718的45度旋转,如图21a至图21b 中控制器参考标记736的相对位移所示的。
198.在图21a中,由环718的象限730a
‑
d表示的四个永磁体722,724,726 和728分别与定子臂534a
‑
534d中的一个对准。参考图21b,在该第二位置, 其通过环718从第一位置(图21a)的45度旋转(即,如由永磁体组件710a 的参考标记736所示的)实现,分别由环718的象限730a
‑
730d表示的四个 永磁体722、724、726和728中的每一个现在穿过两个定子臂交错。结果, 每个定子臂534a
‑
534d具有分裂的磁极化,每个臂的一部分被磁化为北,另 一部分被磁化为南,如图21b所示。
199.参考图21c,如由参考标记736所示的磁体引导件714的进一步45度 旋转使永磁体组件710a的四个永磁体722、724、726和728与定子臂 534a
‑
534d重新对准。如所示的,相对的定子臂534a和534b现在被磁化为 北,而相对的定子臂534c和534d现在被磁化为南。现在被磁化为北的定子 臂534a和534b再次在相反磁极性的两个转子磁体元件512之间交错,因此 排斥北极化的转子磁体元件512a和512b并拉动南极化的转子磁体元件512c 和512d,导致转子510旋转到图21d所示位置的另一个角度增量(对应于 一个转子磁体元件512的宽度的一半)。
200.参考图21d,由环718表示并由参考标记736指示的磁体引导件714的 进一步的45度旋转,再次导致定子528的臂各自具有分裂的磁极性。磁引 导件714的另一个45度旋转使定子528返回到图21a的磁极性配置并使转 子510以另一个角度增量旋转,如图22所示。循环继续重复进一步旋转, 如用于图20a的外部永磁体722、724、726和728的磁体引导件714的图 21e所示的。
201.因此,对于图4c中所示的转子510的实施方式,例如(十二个转子磁 体512的圆形布置)和包括图20a中所示的永磁体布置的阀控制器,磁体引 导件714的180度旋转(如通过比较图21a和图21e中的控制器参考标记 736的位置可以看出的)导致转子510的四个角度增量的旋转(对应于相当 于一个转子磁体元件512的宽度的两倍的运动),如可以通过比较图21a和 图21e中的转子参考标记538的位置看出的。因此,磁引导件714的三次完 整旋转导致转子510的一次完整旋转。通过阀编程器700在转子510上的间 接动作(经由定子528)实现的该“齿轮减速”效果有利地允许转子510的非 常小的增量运动,而不需要在阀编程器700中进行相应的小的运动。这可以 提高用户对阀编程器700的易用性,或者简化阀编程器700的制造,因为不 需要磁体引导件714与可植入阀200的转子510一样小。
202.可以通过改变永磁体组件或转子510的配置(例如,磁体的数量)来实 现阀编程器700和转子510之间的齿轮比的调节。例如,使用如图4c所示 的类似转子布置,但是具有十个转子磁体而不是十二个转子磁体,并且永磁 体组件具有替代图20a的图20b的两个永磁体732和734,导致磁引导件 714的五次完整旋转,引起转子510的一次完整旋转。如本领域技术人员将 认识到的,鉴于本公开的益处,外部永磁体和转子磁体的各种其他组合可以 实施,并且被认为是本公开的一部分并且旨在落入本发明的范围内。
203.图22是表示根据上面参考图21a
‑
图21e讨论的操作的阀编程器的旋转 和相应的定子的变化磁化和转子的旋转的流程图。箭头119a示出了在流程 图中的每个步骤处的转子的旋转。
204.在某些示例中,阀编程器700可以被封装在手持式壳体762中,使得用 户舒适且容易地使用。图23a
‑
图23d示出了阀编程器700的示例760。在该 示例中,阀编程器760具有类似于计算机鼠标的形状。如所示的,在一些实 施例中,阀编程器760在其外表面上具有圆角,且可以具有整体圆形形状, 这可以使用户容易和/或舒适地握持它。在一些实施例中,阀编程器760可以 由用户容易地握持在一只手中。
205.图23a示出了阀编程器760的顶视图。图23b示出了阀编程器760的 下侧视图。图23c示出了阀编程器760的端视图,图23d示出了阀编程器 760的透视图。
206.如上所述,阀编程器760可以是电池操作的。因此,在一些实施例中, 壳体762可以容纳一个或多个电池,以及磁体组件710(在图23a
‑
图23d中 未示出)。如上所述,在一些实施例中,阀200包括十个磁体步进电机,和 阀编程器760的磁体组件710,两个相反磁化的磁体用于旋转阀200的步进 电机。两个相反磁化的磁体具有在阀编程器760内向下定向的相反的磁场。 在一些实施例中,编程器磁体具有的表面场强度为6000高斯。
207.如图23a和图23d所示,阀编程器760可以包括用户界面764,其显示 诸如压力设置、电池状态770以及可选的其他信息的信息。例如,用户界面 764屏幕的中心可以显示已选择的压力(以数字读数)。屏幕的边界可以包 括x射线将显示什么的指示,或者可以由压力读取器指示的阀转子的位置, 如下进一步讨论的。
208.阀编程器760包括界面机构,以允许用户选择阀编程器760的压力设置 点,从而设置阀200的压力。在一些实施例中,如图23a所示,阀编程器 760包括用于增大压力设置点的第一按钮761a和用于减小压力设置点的第 二按钮761b。替代地,阀编程器760可包括轮(例如图23e的实施例中所 示的轮),其沿第一方向是可旋转的以增大压力设置点,并沿第二方向是可 旋转的以减小压力设置点。在一些实施例中,阀编程器760可包括第一按钮 761a、第二按钮761b和轮。在一些实施例中,阀编程器760可将阀200设 置为20个压力设置之一,如上所述。在一些实施例中,最高压力设置不会 完全关闭阀200。这对于测试患者是否仍然需要阀200而不完全关闭阀200 从而避免对患者的潜在伤害是有用的。
209.阀编程器760还可包括编程按钮769,当按下该编程按钮时,使阀编程 器760致动磁体组件710以对阀200进行编程。在一些示例中,编程按钮769 可位于壳体762的前边缘上,如图23a所示。
210.阀编程器760还可以包括开/关按钮772,如图23a和图23c所示的。
211.参考图23b和图23c,阀编程器760的壳体762可以成形为便于将阀编 程器760正确地定向在植入阀200上方以对阀200的压力设置进行编程。在 某些示例中,壳体762包括模
制腔763,其由阀编程器760的底部上的侧壁 765限定。腔763的形状和尺寸被设置成至少大致对应于植入阀200的形状 和尺寸。腔763包括限定在侧壁765中的一对通道767。如上所述,可编程 阀200的入口端口可以连接到流入导管,而可编程阀200的出口端口可以连 接到引流导管。通道767的尺寸和布置可以被设置成使得,当阀编程器760 放置在患者头部上的植入阀200上方时,通道767与流入导管和引流导管对 准,从而有助于正确地将阀编程器760与植入阀200对准。
212.在用户在编程器760上设置期望的压力设置点之后,用户将编程器760 放置在阀200的顶部。接下来,用户按下编程器760的前边缘上的编程按钮 769以开始编程。
213.图23e示出了阀编程器777的顶视图。阀编程器777具有可以握在用户 手中的壳体762。阀编程器777包括用户界面764,其显示诸如压力设置、 电池状态770以及可选的其他信息的信息。阀编程器777包括轮787,该轮 787沿第一方向是旋转的以增大压力设置点,并沿第二方向是可旋转的以减 小压力设置点。在图23e中,轮部分地水平延伸超过壳体762的一侧,使得 它可以由用户的手指旋转。
214.图24是示出操作阀编程器700(例如图23a
‑
图23d的阀编程器760或 图23e的阀编程器777)的方法1100的示例的流程图。在步骤1102中,用 户通过按下编程器上的开/关按钮772来打开阀编程器760。在一些实施例中, 当用户按下并保持开/关按钮772两秒钟时,阀编程器760打开。在打开之后, 阀编程器760在步骤1104进入初始模式。在初始模式中,阀编程器760执 行自检,其中电机逆时针转动并计数一圈的步数,并比较该步数与一圈应当 需要的步数进行比较。在一些实施例中,当电机转动时,电机自检总是活动 的。在一些实施例中,阀编程器显示器(用户界面屏幕)764在步骤1104 中显示所有图标三秒钟。如果阀编程器电池上的电量太低,则阀编程器760 进行到步骤1106,其中电池状态指示器770或指示器在用户界面屏幕764 上闪烁,并且阀编程器760关闭。在一些示例中,如果阀编程器760的电池 电量低,则电池状态指示器770在编程器显示器764上缓慢闪烁,并且如果 电池电量极低,则电池状态指示器770在编程器显示器764上快速闪烁。
215.如果电池电量足够,则阀编程器760进行到步骤1108,其是编辑模式。 如上所述,电池状态可以显示在用户界面屏幕764上。在步骤1108的编辑 模式中,在编程器显示器764上出现表示编辑模式被启用的图标。在编辑模 式中,用户可以按下增大按钮761a或减小按钮761b来增大或减小用于植入 阀200的阀编程器的压力设置点。在其他示例中,其中阀编程器760包括用 于压力设置点调节的轮787而不是按钮761a、761b,用户可以在步骤1108 中旋转所述轮以选择期望的压力设置。
216.一旦已经选择了压力设置点,阀编程器760就准备好用于对植入阀200 进行编程。因此,使用壳体的形状,用户可以将阀编程器760放置在患者的 头上在植入阀200上方,以将阀编程器760与植入阀200正确对准,如上所 述。为了开始对阀200进行编程,用户按下阀编程器760上的编程按钮769, 并进入步骤1110处的编程模式。在编程模式中,编程器显示器764可以显 示所选择的压力设置点值以及锁定符号,例如,如图23a所示的。
217.在一个示例中,为了确保阀200的精确压力设置,阀编程器700可以配 置为首先在一个方向(例如,逆时针)上致动磁引导件714的旋转以将阀200 设置为其完全关闭位置,然后,在相反方向(例如,顺时针方向)上开始旋 转序列,以将阀200设置为用户输入的所选定的压力设置。因此,在某些实 施例中,在预定时间段(例如,一秒)之后,阀编程器760进行到
步骤1112, 其中编程器磁体逆时针转动以初始化阀200。例如,永磁体组件710a、710b 的编程器磁体可以首先逆时针旋转大约六圈,使得可编程阀200的凸轮处于 其最低位置。在达到初始位置之后,阀编程器760进行到步骤1114,其中编 程器磁体开始顺时针转动。当编程器磁体转动时,阀编程器760显示阀200 的当前和最终位置。当达到编程器磁体的最终位置时,阀编程器760进行到 步骤1116,在其中发出警报,例如可听见的警报,指示已达到所选定的压力 设置点。在预定时间段(例如,三秒)之后,阀编程器760返回到步骤1108 的编辑模式。在该阶段,用户可以通过按下开/关按钮772来关闭阀编程器 760。在一些实施例中。在没有用户与阀编程器760交互的一定时间段(例 如60秒)之后,阀编程器760自动关闭。
218.回到图14、图16a
‑
图16h,图18a
‑
图18h,图21a
‑
图21e和图22, 在上述示例中,定子528具有x形状,如图14所示,例如,并且是“实心
”ꢀ
或整体结构。定子528的形状可以在+形状之间变化,例如在定子臂之间具 有90
°
的角度到非常窄的x形状。另外,根据某些实施例,定子528可以使 用多个分立的定子元件而不是单个实心或整体结构来实现。图25a
‑
图25c 示出了具有不同形状的定子的三个示意性示例,其与十二磁体转子组合。图 25a示出了+形整体定子540的示例。图25b示出了定子的示例,该定子包 括四个定子元件542,该四个定子元件位于转子磁体元件512下方,位置大 致对应于图25a所示的示例中的四个定子臂的末端。在图25b所示的示例 中,四个定子元件542配置为四个圆点;然而,定子元件可以具有各种其他 形状。例如,图25c示出了定子的另一示例,其包括配置为“双圆点”或延长 的椭圆的四个定子元件544。在其他示例中,定子元件542或544可以是正 方形或矩形,或者具有其他几何或非几何形状。
219.在图25a
‑
图25c中所示的每个示例中,定子“臂”之间的角度546约为 90
°
;然而,如上所述,角度546可以变化。如本领域的技术人员将认识到 的,鉴于本公开的益处,角度546可具有介于90
°
与非零最小值之间的任何 值(角度值为零或非常接近零导致两个臂定子,而不是四个臂定子,其会改 变磁电机的操作),其会取决于定子528的尺寸和转子510的配置。图26a
‑ꢀ
图26c示出了定子的其他示例,其中角度546约为75
°
。特别地,图26a示 出了x形整体定子540a的示例,其中较近的两个定子臂之间的角度是75
°
, 因此分开更远的定子臂之间的互补角是105
°
。图26b和图26c分别示出了 包括四个分立的定子元件542和544的定子的示例,其中角度546是75
°
。 在某些示例中,角度546的值可以至少部分地基于实现对外部非编程磁场(例 如,来自与阀编程器不相关的mri或其他磁场发生器)的抵抗和转子510 的期望的运动(例如,转子的特定增量运动,其对应于阀的特定增量压力设 置)来选择。在某些示例中,可能期望配置定子528使得电机具有相对高的 齿槽扭矩。齿槽扭矩对应于将转子510保持在特定位置所需的力。高齿槽扭 矩可以增大电机的对外部非编程磁场的抵抗或抗扰性,并且还可以防止转子 510被弹簧400的反作用力移动。
220.与如图25a和图26a举例示出的定子540、540a的示例相比,使用分 立的定子元件542或544而不是实心定子减少了磁材料的量。定子元件542 或544从外部磁场的磁化作用为使转子510以与上面参考图16a
‑
图16h、 18a
‑
图18h、图21a
‑
图21e和22所述的类似方式旋转。转子510的旋转可 以用外部电磁体(例如上面讨论过的并在图13中所示的)或者用外部永磁 体(例如上面讨论过的并例如示出在图20a和图20b中的)来完成。在某 些示例中,每个定子元件542可以比转子磁体元件512略大(例如,如果是 圆形的话,直径更大)。例如,如果转子磁体元件512具有1.3mm的直径, 则在图25b或图26b中所示的圆形定子元件542的直
径可以为1.4mm。
221.如上所述,根据某些实施例,可编程阀200可包括磁指示器机构,通过 该磁指示器机构允许医生例如使用外部磁传感器(例如霍尔传感器)来确定 阀200的压力设置,而无需x射线或其他成像技术。特别地,在某些示例中, 磁电机可包括指示转子510的位置的一个或多个参考或指示器磁体。如上所 述,转子位置与可编程阀200的压力设置直接相关。在一些示例中,外部阀 编程器700可以包括磁传感器,该磁传感器配置为基于指示器磁体读取或检 测植入阀200的压力设置。在其他示例中,可以提供单独的压力读取器,如 下进一步讨论的。
222.根据某些实施例,指示器机构可以结合到转子510中。例如,如上所述, 转子510可以包括位于转子磁体元件512中的某些转子磁体元件的顶部的参 考或定位磁体元件524,如图4a、图5、图6a和图14所示。图27示出了 转子510的示意性示例,其包括位于转子磁体元件512中的某些转子磁体元 件上方的三个参考磁体元件524a、524b和524c。在所示的示例中,参考磁 体元件524a具有北磁极性,并且参考磁体元件524b,524c大致径向地位于 参考磁体元件524a的对面(在转子磁体元件512的与参考磁体元件524a直 接径向相对的任一侧上)并且都具有南磁极性。如上所述,转子磁体元件512 布置成具有交替的磁极性,并且使得彼此径向相对的每两个转子磁体元件 512具有相同的磁极性。因此,为了提供具有北极和南极并且跨越转子510 的参考磁体,可以采用三个参考磁体元件524的布置,例如图27中所示的。 如上所述,在其他实施例中,转子510可包括除12之外的多个转子磁体元 件512。例如,转子510可包括十个磁体元件。在这样的示例中,可以仅使 用两个参考磁体元件524,因为十磁体转子中的相对的转子磁体元件具有相 反的极性,与十二磁体转子不同。在其中转子510包括十个磁体元件的另一 示例中,可以使用四个参考磁体(两个相对布置的对)。因此,如本领域技 术人员将理解的,鉴于本公开的益处,至少部分地基于转子510的配置,可 以使用各种数量和布置的参考磁体元件524。另外,在某些实施例中,不是 包括单独的参考磁体元件524,对应于参考磁体元件的期望位置的转子磁体 元件512可以简单地制造得比其他转子磁体元件“更高”,从而充当实现旋转 转子510的转子磁体元件和位置指示磁体两者。
223.在其他示例中,不是将参考磁体元件524定位在转子磁体元件512上方, 如图4a、图5、图6a、图14和图27所示,参考或定位磁体元件可以定位 在转子510的侧面上。图28a
‑
图28c示出了电机配置的示例,其中竖直定 向的(相对于水平定向的转子磁体元件512)侧面定位磁体元件553被定位 在转子磁体元件512的径向外侧。如下参考图32进一步讨论的,定位磁体 定向指示器磁体(图28a
‑
图28c中未示出),该指示器磁体可由压力读取 器660读取,例如,以指示转子510的位置并因此指示阀200的压力设置。 参考图28a,示出了其中提供两个侧面定位磁体元件553的示例。在该示例 中,每个侧面定位磁体元件553的相应内面555(即,更靠近转子磁体元件 的面)的极性与相邻的转子磁体元件512的顶面的极性相反。在一些实施例 中,每个侧面定位的磁体553具有例如1.0毫米的直径和0.3毫米的高度。 图28b示出了另一个示例,其中提供了四个侧面定位磁体元件557。在该示 例中,每个侧面定位磁体元件557的相应表面555的极性与相邻的转子磁体 元件512的顶面的极性相同。在一些实施例中,每个侧面定位的磁体557具 有例如,0.85毫米的直径和0.25毫米的高度。图28c示出了另一个示例, 其中提供了两个侧面定位磁体元件559。与图28a中所示的示例相
反,其中 两个侧面定位磁体元件553跨越转子510径向彼此相对地放置,在图28c所 示的示例中,两个侧面定位磁体元件被定位在转子510的同一半球中。每个 侧面定位的磁体559的相应内侧555的极性与相邻的转子磁体的顶面的极性 相同。在一些实施例中,每个侧面定位磁体559具有例如1.0毫米的直径和 0.3毫米的高度。
224.参考图29,示出了外部阀编程组件800的示例的框图,该外部阀编程组 件800结合了磁传感器812,该磁传感器配置为检测来自参考磁体元件524 或指示器磁体(例如,由定位磁体元件553、557或559定位的)的磁信号 并且从其得出转子510的位置和阀200的相应压力设置。如图29所示,阀 编程组件800可包括发送器头810,该发送器头包括磁体组件814(例如永 磁体组件710或例如以上参考发送器头610描述的电磁体的集合),用于调 节阀200的压力设置以及如控制和操作磁体组件814所需的通信/控制电路 816(例如电子通信端口、电机、致动器、驱动电路等)。阀编程组件800 还包括控制装置820,该控制装置包括用户界面822,以允许用户查看信息, 例如阀200的当前压力设置,并且例如提供控制命令,例如阀200的期望压 力设置,以及如操作控制装置820或与发送器头810通信所需的通信/控制电 路824。在某些示例中,发送器头810和控制装置820是分开的并且经由有 线或无线通信链路804进行通信。在其他示例中,发送器头810和控制装置 820可以被封装在一起,如虚线802所示,例如在阀编程器760中。磁传感 器812可以与发送器头810或控制装置820中的通信/控制电路816通信。在 其中磁体组件814包括可以关闭的电磁体的某些示例中,磁传感器812可以 封装在发送器头810中。在其他示例中,它可以被封装为单独的单元。
225.在一个实施例中,包括在发送器头810中的磁传感器812允许植入阀200 的压力设置被检测并传送到控制装置820。在一个示例中,磁传感器812检 测转子510在阀200内的位置并将检测到的位置转换成压力设置读数。可以 根据校准过程为每个阀确定旋转位置和压力设置之间的这样的相关性。该相 关性可以提供查找能力,其中旋转位置可以转换为压力设置,反之亦然。可 以根据在此采用的技术(例如,基于转子磁体元件512的已知尺寸)来实现 这样的压力调节的分辨率。替代地或另外地,弹簧类型和/或弹簧常数的选择 与凸轮的形状结合可用于控制每个旋转步的压力变化。例如,磁传感器812 可以是霍尔传感器或罗盘。
226.根据某些实施例,阀编程组件,例如阀编程组件800,可包括阀编程器, 例如上面讨论的阀编程器760,以及单独的压力读取器。压力读取器可用于 读取植入式可编程阀200的压力设置,并且阀编程器760可用于编程植入阀 200的压力设置,如上所述。压力读取器可以是包括磁体的罗盘,该磁体配 置为基于磁体的取向提供压力读数。罗盘可以是机械罗盘或电子罗盘。
227.在一些实施例中,压力读取器可以是手持的。在一些实施例中,压力读 取器是电子的。在某些示例中,压力读取器可具有例如与阀编程器760非常 相似的物理外观。
228.图30a和图30b示出了根据某些实施例的压力读取器660的示例。图 30a是压力读取器660的透视图,图30b是顶视图。通过将压力读取器660 放置在植入阀200上使得压力读取器660的上表面上的箭头662与流体穿过 阀200的流动方向对准,而使得压力读取器660的磁体相对于阀200定向。 压力读取器660的形状和尺寸可以被设置成便于其与植入阀200对准。例如, 压力读取器660可以在其下表面上包括与植入阀200的尺寸和形状相对应的 凹部或腔,类似于上面关于阀编程器760所讨论的。如图30a和图30b所 示,压力读取器660
可以具有圆形形状,并且可以包括具有围绕其圆周布置 的一系列压力设置的显示器。显示器可以是机械的或电子的。当压力读取器660放置在植入阀200上方并与其对准时,基于如上所述的参考磁体元件, 压力指示器664指向压力读取器660上的压力设置(如图30b所示),其对 应于阀200的压力设置。
229.图31示出了操作压力读取器(例如图30a
‑
图30b的压力读取器660) 的方法1000的示例。在步骤1002中,用户打开压力读取器660。在一些实 施例中,当用户按下压力读取器上的开/关按钮达预定时间段(例如,两秒) 时,压力读取器660打开。在打开之后,压力读取器660在步骤1004中前 进到其初始操作模式。在步骤1004的初始模式中,压力读取器传感器被校 准以移除或补偿例如地球磁场的影响。在校准期间,可以产生磁场的装置, 例如阀编程器760,应远离压力读取器660。在其中压力读取器660包括电 子显示器的某些实施例中,显示器可包括电池状态指示器,类似于上面参考 阀编程器760所述的。根据某些实施例,如果压力读取器660的电池电量太 低,则电池状态指示器会闪烁,然后压力读取器进行到步骤1006,其中压力 读数器自动关闭。在压力读取器660的操作期间,如果电池电量变得太低, 则电池状态指示器可以闪烁以向用户指示需要更换压力读取器的电池。如果 电池电量变得极低,则电池状态指示器会开始更快地闪烁,并且最终压力读 取器660可以自行关闭。
230.如果压力读取器660的电池电量充足,则压力读取器660在步骤1004 中执行磁传感器校准,然后压力读取器660进行到步骤1008;搜索模式。在 搜索模式期间,用户可以将压力读取器660定位在患者的头上在植入阀200 上方。在步骤1008的搜索模式中,搜索图标(例如,放大镜图标)可能出 现在压力读取器660的电子显示器上,以向用户显示检测到的磁场的强度太 低。这提示用户重新定位压力读取器660,使得检测到的磁场更强。如果不 能改善检测到的磁场强度,则这可以向用户指示压力读取器660磁场指示是 不可靠的。
231.当压力读取器660检测到具有足够强度的磁场时,压力读取器660的显 示器在步骤1010处显示阀的磁场方向,其对应于阀的压力设置。例如,如 图30a所示的,压力指示器664可以指示阀200的压力设置。在压力读取器 660包括电子显示器的示例中,在步骤1012处,可以以周期性间隔(例如, 每两秒钟)显示和更新阀的压力设置。在步骤1010和步骤1012中的任一个 处,如果磁场强度太低,则压力读取器660返回到步骤1008,其中显示器可 以指示压力读取器正在搜索足够强的磁场。
232.用户可以通过按压压力读取器660上的开/关按钮来打开和关闭压力读 取器660。在某些示例中,在预定时间段(例如,360秒)之后,压力读取 器660自动关闭。
233.根据某些方面,用于设置可手术植入的分流阀200中的压力的套件可包 括压力读取器660和阀编程器760。在其他示例中,阀组件100可包括集成 的阀编程器760和压力读取器660。在某些示例中,压力读取器660和阀编 程器760可以作为套件的一部分一起提供给用户,或者它们可以彼此分开地 提供。在一些示例中,套件可以进一步包括可手术植入的可编程分流阀或阀 组件,例如可手术植入的分流阀200或阀组件100,或另一个可手术植入的 可编程分流阀或阀组件。
234.在指示器机构随转子510旋转的某些情况下(例如,其中指示器机构包 括参考磁体元件524或转子磁体元件中的某些转子磁体元件,如上所述), 外部非编程磁场,例如来自mri的场,可能作用在指示器/参考磁体上并且 不期望地在转子510上引起扭矩。因此,参
考图32,示出了可编程阀的示例, 其示出了可以避免该情况发生的指示器机构的替代示例。在所示的示例中, 指示器机构包括定位磁体550,该定位磁体附连到转子510,非常靠近转子 的中心。定位磁体550可以用于取向指示器磁体552。因此,指示器机构还 包括指示器磁体552,该指示器磁体没有附连到转子510并且在其自己的红 宝石轴承上自由地枢转。在该示例中,定位磁体550和指示器磁体552都具 有环的形状并且径向地被磁化。当转子510移动时,定位磁体550随转子510 一起旋转,并磁性地吸引指示器磁体552以使其旋转相同的量。在一个实施 例中,定位磁体550具有非常小的磁力,因此mri或其他非编程磁场对定 位磁体550的影响将不足以克服电机的齿槽扭矩并导致转子510旋转。如上 所述,定位磁体550的磁力足以吸引指示器磁体552以使其旋转相同的量。 上面讨论的侧面定位磁体553、557和559可以以类似的方式操作。在某些 示例中,指示器磁体552具有强磁场,其可以由位于患者身体外部(例如, 距离第二指示器磁体10mm或更远的距离)的罗盘、霍尔传感器或其他磁 体传感器812读取。例如,指示器磁体可以是单个径向地磁化的(即,具有 一个北极和一个相对的南极)磁体。指示器磁体552可能受到非编程磁场的 影响,例如来自mri的场;然而,因为指示器磁体552可以在其自身轴承 上自由旋转,所以其运动不会导致转子510旋转。当移除非编程磁场时(例 如,在mri扫描完成之后),定位磁体550将自动重新定向指示器磁体552。 通过将磁指示器机构分成两个单独的磁体550、552,阀200可以具有足够强 的磁体以从外部读取,同时,强的非编程磁场(例如由mri产生的磁场) 将不会改变阀200的压力设置,因为强指示器磁体(552)与转子510解耦。
235.在另一个实施例中,定位磁体550可以配置为具有轴向磁化的北极和南 极的两个小盘磁体,而不是作为径向地磁化的单环磁体。在此情况下,对于 两个小盘磁体中的一个,北朝向指示器磁体552,南背离指示器磁体552指 向。对于两个小盘磁体中的另一个,南朝向指示器磁体552,北背离指示器 磁体552。这样的配置的操作原理与上面讨论的关于产生用于识别指示器磁 体552的位置的局部磁场的原理相同。使用两个非常小的盘磁体以实现定位 磁体550在某些应用中相对于环形磁体是优选的,因为该配置可以在患者身 体的图像中产生更少的伪像(例如,如可以使用mri或ct扫描来拍摄的)。
236.定位磁体550也可以具有各种其他配置。例如,如上面参考图28a
‑
图 28c所讨论的那样,在其他实施例中,定位磁体550可以用定位磁体553、 557或559的任何布置或类似布置代替。
237.如上所述,传统的磁可调阀的一个限制是验证压力设置可能需要使用x 射线来检测植入装置上的不透射线标记。根据某些实施例,可以使用如上所 述的指示机构相对于参考(例如,壳体和/或壳)来确定转子510的初始取向。 植入阀200的压力设置可以通过将罗盘放置在患者头部上在植入阀200的附 近来验证。罗盘的针将使其自身与指示器磁体552的方向对准,如图32所 示,或参考磁体元件524a
‑
524c,如图27所示,由此指示转子510的位置。 于是医生能够通过考虑转子510相对于壳体202的位置来确定阀200的压力 设置。
238.因此,可以精确地确定转子510的位置,从而也可以确定阀的阈值打开 压力的精确设置。在至少一些实施例中,转子510在至少一个方向上自由旋 转,超过一整圈,其中压力设置对于每次旋转重复。以此方式,转子510的 位置可以唯一地识别弹出压力。
239.如上所述,在某些实施例中,磁电机本质上具有对外部非编程磁场的抗 扰性或高度抵抗外部非编程磁场,包括甚至与mri相关的强磁场。然而, 在某些情况下,可能期望进
一步的对非常强的磁场(例如与mri相关的磁 场)的抗扰性(例如,非常高或完全保证转子510不会发生运动)。因此, 在某些实施例中,可编程阀200可包括机械制动器,其在施加制动时防止转 子510的运动。
240.参考图33,示出了根据一个实施例的包括机械制动器的示例的磁电机的 示例的局部截面图。在该示例中,机械制动器包括制动弹簧554和制动缸 556,其可绕中心枢轴558旋转。在一个示例中,制动缸由热塑性材料制成, 例如聚甲醛。制动弹簧554可以由金属(例如,不锈钢)制成。在图33所 示的示例中,制动弹簧554是具有异形切口的圆盘;然而,制动弹簧可以具 有各种不同的形状,下面将进一步讨论其中的一些示例。制动缸556包括多 个制动缸齿560,其配置为与相应的多个电机齿562接合。当制动器处于锁 定位置时,制动缸齿560与电机齿562接合以防止转子的旋转。当制动器解 锁时,制动缸齿560与电机齿562脱离,允许转子响应于所施加的编程磁场 而自由旋转,如上所述。
241.根据某些实施例,使用第二指示器磁体552实现制动器的锁定和解锁。 如上所述,在某些示例中,指示器磁体552是径向地磁化的单个磁体。因此, 尽管很小,但是第二指示器磁体可以具有可以用于释放制动器的相对强的磁 场。如上所述,第二指示器磁体552是自由旋转的磁体,不依赖于转子510 的旋转。如果外部磁体靠近第二指示器磁体552放置,则第二指示器磁体将 旋转以根据外部磁体的磁场定位自身。在第二指示器磁体552是径向磁化的 磁体的示例中,如果外部磁体被轴向磁化,则不会将第二指示器磁体拉向其 自身,因为第二指示器磁体的一个磁极将被吸引到外部磁体,而另一个被排 斥,两个相反的力量相互平衡。相反,如果外部磁体也被径向磁化,当它靠 近阀放置时,第二指示器磁体552将根据外部磁体的磁场旋转以定位自身, 然后将被吸引到外部磁体。因此,第二指示器磁体552将被向上拉向外部磁 体。该向上运动可用于使制动器脱离,允许转子510旋转以编程阀200的压 力设置。当未施加外部磁场时,制动弹簧554向下按压制动缸,保持制动缸 齿560与电机齿562接合。参考图34,在中心枢轴558是圆形的一个示例中, 制动缸556在其围绕中心枢轴的内壁上包括一个或平坦部分563,使得制动 缸仅能够上下移动并且不会旋转。在其他示例中,可以采用其他特征或形状 来防止制动缸556的旋转。图34示出了释放制动器的电机510的示意性示 例。
242.因此,在某些实施例中,阀编程器700的永磁体组件710包括径向磁化 的制动控制器磁体,当阀编程器被放置在阀200附近以编程阀的压力设置时, 该制动控制器磁体用于脱离制动器。图35示出了包括制动控制器磁体740 的阀编程器700的永磁体组件710c的示例。图35中示出的示例类似于图20a 中所示的永磁体组件,并且可以用于编程包括十二磁体转子510的阀,如上 所述。
243.使用包括图35所示的磁体组件710c的阀编程器700的示例的电机和机 械制动器的操作的示例在下面参考图36、图37a和图37b进行论述。图36 是对阀200进行编程的方法的一个示例的流程图。图37a示出了阀200的一 个示例的截面图,其示出了在制动器处于锁定位置的情况下磁电机和机械制 动器的各方面,图37b是示出处于解锁位置的制动器的对应视图。
244.参考图36,在编程阀200的压力设置的第一步骤902中,医生或其他用 户直接在阀编程器700上选择阀200的新压力设置。在一个示例中,这可以 使用圆形显示器来实现,例如,如图11b中示出的,例如使用电容式触摸。 在步骤904中,医生/用户将阀编程器700放置
在患者头部上或附近靠近植入 阀。作为该过程的开始,制动器处于锁定位置,例如,如图37a中所示的。 在某些情况下,对于医生/用户可能更容易或更方便的是,首先选择阀的期望 的压力设置(步骤902)并将阀编程器700置于患者头部附近(步骤904); 然而,本领域技术人员将理解到,步骤902和904可以以相反的序列执行。 在步骤906中,释放阀200中的制动器,使得阀编程器700可以作用在磁电 机上以编程所选择的压力设置。在包括永磁体组件710c的阀编程器700的 一个实施例中,中心径向磁化的制动控制器磁体740处于比其他四个磁体 722、724、726和728更高的位置。例如,制动控制器磁体740可以通过弹 簧向上推动被保持在该位置。例如,医生/用户可以按下制动控制器磁体740, 直到它接触植入阀200顶部的皮肤。当制动控制器磁体740接触皮肤时,它 通过吸引第二指示器磁体552来解锁制动器,例如,如上所述的并且如图37b 所示的。在步骤908中,阀编程器700用于通过磁化定子528以使转子510 旋转到对应于所选的压力设置的位置,来编程阀200的所选定的压力设置, 如上所述。在一个示例中,阀编程器700可以包括编程“打开”开关,其可以 在释放制动器之后被启动以允许编程开始。“打开”开关可以内置在永磁体组 件710中,特别是内置在制动器释放机构中。例如,医生/用户可以稍微用力 地向下推动制动控制器磁体740以触发开关以开始编程。在一个示例中,在 进行编程时必须保持按下开关。在编程完成之后,可以向医生/用户提供完成 的指示,例如,可以听到声学反馈。在该指示处,制动控制器磁体740由医 生/用户释放,并且通过弹簧被推回到其无效位置。一旦从制动控制器磁体 740移除磁场,并且第二指示器磁体552不再向上吸引,并返回其中性位置, 结果,制动缸556向下移动(由制动弹簧554按下),使制动缸齿560与电 机齿562重新接合并将转子510锁定在编程位置(步骤910)。然后可以从 患者头部移除阀编程器700(步骤912)。
245.图38示出了磁体组件710d的另一示例,该磁体组件710d可用于阀编 程器700中以对包括例如十磁体转子510的阀进行编程。在该示例中,图20b 中示出的示例性永磁体组件710b的两个永磁体732、734已被单个径向磁化 的控制器磁体742代替,该控制器磁体742用于释放制动器并编程阀200的 压力设置,如上所述。
246.图39是对具有十磁体转子510并使用阀编程器200的阀200进行编程 的方法的一个示例的流程图,该阀编程器200包括图38中所示的磁体组件 710d的示例。如在上面讨论的示例中,在编程序列的第一步骤902中,医生 /用户直接在阀编程器700上选择阀200的新压力设置。然后,医生/用户可 以将阀编程器700放置在植入阀附近(步骤914),其由于存在径向地磁化 的控制器磁体742而自动释放制动器。在步骤916中,医生/用户致动编程序 列。例如,这可以通过按下阀编程器200上的“开始”按钮来实现。在步骤918 中,阀编程器700用于通过磁化定子528以使转子510旋转到对应于所选定 的压力设置的位置来编程阀200的所选定的压力设置,如上所述。当编程序 列完成并且已经达到所选择的压力设置时,编程器可以使用例如声学或视觉 指示器(例如,嘟嘟声、显示特定颜色的光或闪光等)来发出编程序列的完 成(步骤920)的信号。在编程已经完成并且听到/看到信号之后,医生/用 户可以从患者头部附近移除阀编程器,从而自动地接合制动器(步骤922)。
247.如图37a和图37b所示,在一个实施例中,电机包括一对红宝石轴承 564,其允许第二指示器磁体552相对于制动缸556旋转,以便指示转子510 的位置和阀200的相应的压力设置,如上所述。在一个示例中,第二指示器 磁体552包含在在红宝石轴承564上旋转的壳中。
248.如本领域技术人员将认识到的,鉴于本公开的益处,制动机构及其部件 可具有各种不同的结构形式,并且可与磁电机及其部件的各个实施例中的任 何一个结合实施。在图37a和图37b中所示的示例中,磁指示器机构包括 与第二指示器磁体552协作的第一指示器磁体550。然而,制动机构也可以 用阀配置实现,在该阀配置中,如上所述的一个或多个略微“更高”的转子磁 体元件512与第二指示器磁体552而不是第一指示器磁体550结合使用以进 行位置感测。在图33所示的示例中,制动缸齿560和电机齿562示出为靠 近中心枢轴558、靠近第二指示器磁体552的“内部”和“下方”。然而,可以 实现各种其他配置。例如,参考图40,示出了另一实施例,其中制动缸556 跨越第二指示器磁体552,并且制动缸齿560和相应的电机齿562定位在第 二指示器磁体552的“外侧”。
249.在图33、图34、图37a
‑
图37b和图40所示的示例中,制动缸556包 括制动缸齿560,该制动缸齿接合电机齿562以将转子510锁定就位,如上 所述。根据另一实施例,制动弹簧554可包括与电机齿562接合的特征,从 而不需要制动缸齿560。例如,参考图41,示出了可编程阀200的另一实施 例的局部截面透视图,其中制动弹簧554包括一对臂566,每个臂具有突起 566a,突起566a配置为与电机齿562接合以锁定转子510。在该示例中,电 机齿562围绕转子壳514的圆周定位。图42是图41中所示实施例的一个示 例的平面图,其中转子510包括十二个转子磁体元件512。图43是与图41 所示的实施例类似的实施例的另一个示例的平面图,其中转子510包括十个 转子磁体元件。图44a是沿图42中的线a
‑
a截取的截面图,图44b是沿图 42中的线b
‑
b截取的另一截面图。在一个示例中,其中转子包括十二个转 子磁体元件512,多个电机齿562包括24个电机齿,使得转子可以锁定到对 应于转子磁体元件的一半宽度的旋转步的每个位置中。然而,不同的配置可 包括不同数量的电机齿562。
250.在图41和图42中所示的示例中,制动弹簧554包括两个臂566,并且 每个臂在其末端处包括突起566a,该突起比臂566的主体更薄/更窄,并且 配置为当制动器处于锁定位置时装配在一对相邻的电机齿562之间。然而, 如本领域技术人员将认识到的,鉴于本公开的益处,可以实现各种不同的配 置,只要制动弹簧554包括配置为与电机齿562接合以防止转子500的旋转 的一个或多个特征。例如,图43所示的制动弹簧554包括宽度更均匀的臂 566,缺少限定的突起566a。参考图45,在另一个实施例中,制动弹簧554 包括围绕中心环部分568定位的四个臂566,而不是两个,并且臂的宽度更 均匀,类似于图43中所示的示例,不是具有图40中所示的较窄端突起566a。 在图43和图45中所示的示例中,可以选择臂566的宽度和相邻的电机齿562 之间的间隔,使得臂可以装配在相邻的电机齿之间,以将转子510锁定在适 当位置并防止其旋转。
251.参考图46a和图46b,结合了使用制动弹簧554以接合电机齿562的制 动机构的磁电机的实施例可以以如上所述的使用制动控制器磁体740或742 以解锁或释放制动器相同的方式进行操作。在一个示例中,电机齿562定位 在转子壳514的顶部圆周上,如图46a所示,并且在锁定位置,弹簧554 安置成使得臂566位于相邻的电机齿之间,从而防止转子510的旋转。制动 弹簧554可由阀的顶盖202a支撑。如上所述,并且如图46b所示,当径向 地磁化的制动控制器磁体740或742放置在阀200上方时,它将吸引第二指 示器磁体552并向上推动制动弹簧554,从而解锁转子510使其自由旋转。 如图46a和图46b所示,在一个示例中,第二指示器磁体552位于壳570 中,壳570包括壳突起572。当第二指示器磁体552被制动控制器磁体740 或742向上拉时,壳突起572压靠在弹簧臂566上,将臂提升到电机齿562 上
方,使得转子510可以旋转。当制动控制器磁体740或742被移除时,制 动弹簧554向回下降,使得臂566再次安置在相邻的电机齿562之间,如图 46a所示。
252.图47a和图47b示出了包括十磁体转子510的可编程阀200的另一示 例,还示出了制动机构的示例。图47a是可编程阀200的平面图,图47b 是沿图47a中的线a
‑
a截取的截面图。
253.图48示出了根据某些实施例的可编程阀200a的另一示例,其包括步进 电机、制动机构和指示器磁体组件。在该示例中,凸轮212具有倾斜表面213, 并且弹簧409包括由两个平行臂409k侧接的中心臂409j。中心臂409j是悬 臂,其自由端409h靠在阀元件208上,并且两个平行臂409k固定到枢轴点 407的下侧。凸轮212的位置与弹簧409的张力之间的关系取决于枢轴点407 的位置、弹簧409和凸轮212之间的接触点,以及悬臂409g和阀元件208 之间的接触点。根据这些关系,当如果凸轮212处于其最高位置时,则悬臂 409g可以被推向阀元件208,或者替代地,悬臂409g可以被推离阀元件208。 在如图48所示的配置中,当凸轮212处于其抵靠弹簧409的最高位置(或 其最高倾斜水平)时,弹簧409的张力最大并且倾向于将悬臂409g推向朝 向阀元件208的方向。图48的阀200a结合了接合制动弹簧554的制动齿562, 如上所述,以防止当暴露于磁场(除编程场之外)时阀200a的压力设置的 不希望的变化。
254.可以使用充分描述的外科手术方法将阀组件100的实施例植入患者中。 在手术植入之前,可以将阀200的压力设置调节到期望压力设置。在一个方 面,工作压力可以设置为近似等于患者的脑室csf压力,使得在手术后不会 发生压力变化。在患者从手术中恢复之后,可以按照需要调节压力设置。例 如,在患有nph的患者中,可以减小压力设置以便开始减小脑室的尺寸。 可以对压力设置另外进行额外调节。例如,一旦脑室的尺寸充分减小,就可 以增大阀的压力设置。如将认识到的,植入阀200的使用准许在治疗患者的 过程中根据需要从外部调节阀200的压力设置。
255.在某些实施例中,治疗脑积水的方法包括植入阀组件100的实施例,该 阀组件100具有在患者大脑的脑室腔内的脑室导管120以及连接到连接器 140的远端导管,该连接器安装在患者身体中的远处位置处,流体要在该位 置处被引流。身体的csf引流的远处位置包括,例如,心脏的右心房以及腹 膜。
256.除了脑积水之外,还有与过量流体积聚相关的若干其他病症,并且可以 通过使用适当设计的流入导管将流体引流到身体的另一部分来治疗。这样的 病症包括,例如,慢性心包积液、慢性肺积液、肺水肿、腹水和眼内青光眼。 可以设想到的是可编程阀200的实施例可以被用在这些病症的治疗中。
257.如上所述,本文所述的阀的压力设置可以以许多离散的步骤或增量调 节,或者在预定范围内连续调节。本文所述的阀的实施例的压力可以从低压 力(例如,10mm h2o)变化到高压力(例如,400mm h2o)。大多数传统 的阀仅具有高达200mm h2o的压力,并且只可以在每次压力设置之间以相 对较大的增量进行调节。
258.改进的阀
259.参考图49,可植入分流阀组件的另一实施例,通常表示为4900,其包 括由泵送室4906分开的两个阀4902和4904。在一个示例中,脑室导管可以 连接到阀组件4900的入口4910处的连接器4908,而引流导管可以附连到连 接器4912并连接到阀组件的出口4919。泵
送室4906的降压泵送流体通过阀 4904朝向出口4914和引流导管。在被降压之后,释放泵送室4906以泵送流 体通过阀4902。阀4902是包括磁电机的外部可编程阀,如下更详细地讨论 的。例如,第二阀4902可以是止回阀。在这种情况下,在通过可编程阀4902 之后,流体在进入引流导管之前流过止回阀4904。在一个示例中,可编程阀 4902操作以保持阀组件4900关闭直到流体压力上升到阀的预定压力设置。 通常,止回阀4904可以设置在低压下,允许包括磁电机的可编程阀4902的 压力设置来控制通过阀组件4900的流体的流动。在其他示例中,第二阀4904 可以是重力启动阀,其允许阀组件自动调节以响应在患者的姿势改变(即, 从水平(斜躺)移动到竖直(直立)位置)时发生的csf静水压力的变化。
260.与阀组件100一样,鉴于本公开的益处,本领域技术人员将理解到,可 以调节阀组件4900的各个实施例的长度、尺寸和形状。
261.参考图50和图51,本公开的实施例的可植入磁可编程阀装置通常表示 为5000。阀装置5000包括容纳阀装置的部件的基座5002(也称为主体或壳 体)。阀装置5000的基座5002包括底壁5004和从底壁向上延伸以限定腔 5008的外围壁5006。基座5002的外围壁5006包括入口端口5010和出口端 口5012。入口端口5010可以连接到阀组件4900的近端(或流入)导管4908, 而出口端口5012可以连接到远端或引流导管。在分流csf流体的阀组件的 情况下,近端导管4908可以是脑室导管或腰椎导管。在此情况下,来自脑 室的csf流体进入脑室导管或腰椎导管并进入阀组件5000的入口端口 5010。远端导管用作连接到连接器的引流导管,以将流体引导到身体的远端 位置(诸如心脏的右心房(va分流)或腹膜腔(vp或lp分流)以进行引 流。
262.阀装置5000还可包括顶盖或盖子5014,其与阀装置的基座5002配合以 形成适于植入人体的密封外壳。阀装置5000的顶盖5014是装置的在植入时 朝向患者的头皮定向的侧面。阀装置5000的基座5002和顶盖5014可以由 任何生理相容的材料制成。生理相容材料的非限制性示例包括聚醚砜、聚砜 和硅氧烷。如本领域技术人员将理解的,阀装置5000的基座5002和顶盖5014 可以具有各种形状和尺寸,其至少部分地取决于阀装置内的部件的尺寸、形 状和布置。
263.根据某些实施例,阀装置5000包括通过弹簧(其通常表示为5020)偏 压抵靠阀座5018的阀元件5016。弹簧5020可以包括例如悬臂弹簧。下面更 详细地讨论弹簧5020的某些实施例。在一个实施例中,阀座5018被压配合 在入口端口5010内以将阀座固定在适当的位置。
264.例如,流体经由脑室导管4908进入阀装置5000,并流过入口端口5010, 该入口端口在其壳端部终止于阀座5018。流体(例如csf)的压力在倾向于 将阀元件从阀座抬起的方向上推动阀元件5016和弹簧5020。阀元件5016 和阀座5018的表面一起限定孔,且该孔的尺寸或直径确定流体流过阀装置 5000的速率和量。阀元件5016优选地具有大于阀座5018的直径,使得当阀 元件靠在阀座上时,孔基本上是关闭的。阀元件5016被放置在孔的入口侧 上,并且偏压抵靠由阀座5018限定的孔的圆形边缘,保持其关闭直到入口 室中的csf压力超过预选的弹出压力。
265.阀元件5016可以是球形、圆锥形、圆柱形或其它合适的形状,且在示 出的实施例中,阀元件是球形的球。球形的球和/或阀座5018可以由任何适 当的材料制成,包括例如合成红宝石或蓝宝石。阀座210提供互补表面,诸 如用于球形阀元件的截头圆锥形表面,使得
在阀装置的关闭位置,阀元件在 阀座内的安置导致流体紧密密封。这样的阀的压力设置(例如打开压力)通 过改变阀元件5016抵靠阀座5018的偏压力来调节。在一个示例中,如上所 述,阀元件5016和阀座5018可以被压配合在基座5002的入口端口5010中, 并且,一旦达到初始压力设置,通过摩擦保持在适当位置。在一个实施例中, 阀元件5016包括红宝石球,且阀座5018也由红宝石制成。
266.根据一个实施例,使用磁电机实现弹簧5020抵靠阀元件5016的偏压, 该磁电机(通常表示为5022)连续地或以有限的增量增大或减小阀装置5000 的工作压力。根据某些实施例,磁电机5022包括定子5024和转子,该转子 (通常表示为5026)响应于外部磁控制场而相对于定子旋转。在一个示例中, 转子5026围绕柱5028的中心旋转轴线旋转,该柱从基座5002的底壁5004 向上延伸。下面更详细地讨论磁电机5002的实施例的配置和操作。
267.另外参考图52
‑
图54,根据某些实施例,转子5026包括转子壳5030和 布置在转子壳内的多个转子磁体元件(每个表示为5032)。在一个实施例中, 转子壳5030包括具有带有台阶的圆周壁的圆柱形主体5034,所述台阶(每 个表示为5036)形成在圆周壁的顶表面上。在示出的实施例中,有20个台 阶5036,因此,使在每个台阶之间转子的旋转能够为18度。转子壳5030 还包括具有通道5038的底部,所述通道5038形成在底部中。多个转子磁体 元件5032布置成圆圈并设置在通道5038内。如示出的,有十个转子磁体元 件5032。在一个示例中,转子磁体元件5032是永磁体,每个都具有南极和 北极。转子磁体元件5032大致布置成圆圈,具有交替的极性,使得无论从 顶部或底部观察,南极和北极在每个转子磁体元件之间交替。因此,在任何 一个角位置处,暴露在转子磁体元件5032顶表面上的极与暴露在底表面上 的极相反。转子磁体元件5032可以在通道5038内固定地安装到转子壳5030, 该通道5038可以用作磁体引导件以容纳和引导转子磁体元件的旋转。转子 磁体元件5032示出为圆盘;然而,应当理解到,转子磁体元件5032不需要 是盘形的,并且可以具有任何形状,诸如但不限于长方形、正方形、矩形、 六边形、自由形状等。优选地,所有转子磁体元件5032是大致相同的尺寸 或大致相同的磁强度,即使它们的尺寸变化以确保转子的平稳旋转。根据一 个实施例,十个转子磁体元件5032在通道5038内胶粘到转子壳5030。
268.根据某些实施例,除了转子磁体元件5032之外,转子5026还可包括x 射线标记(表示为5040、5044)以及定位磁体(每个表示为5042)。在一 个实施例中,x射线标记5040、5044是钽球,其不透射线且能够被x射线 设备检测到。x射线标记5040由粘合剂(例如,胶水)固定到基座且在转 子5026的操作期间保持静止。x射线标记5044由粘合剂(例如,胶水)固 定到转子5026且随着转子旋转。阀装置5000的压力设置对应于转子5026 的特定角旋转,因此允许医生通过拍摄x射线并且比较x射线标记5040和 x射线标记5044之间的角偏转来读取阀当前的压力设置。此外,x射线标 记5040指示阀装置5000的右手侧,因此医生知道如何正确地定向x射线以 读取阀装置地压力设置。
269.另外参考图55,转子5026配置为围绕柱5028的旋转轴线旋转以响应作 用于定子5024的施加的外部磁场。转子5026因此还可以包括邻近转子壳 5030的内圆周布置的一个或多个轴承环以允许转子壳旋转。例如,转子壳 5030包括单个轴承环5046,其可以由例如合成红宝石制成以使转子壳围绕 柱5028的相对旋转成为可能。
270.根据一个实施例,来自外部磁场的磁脉冲被用于选择性地磁化定子 5024,其作用于磁转子5026并因此控制转子的运动。在一个实施例中,定 子5024被固定到基座5002的底
壁5004的凹部内,该凹部的轮廓设定为接 收加号(+)形定子。外部磁场可以由例如放置在阀装置5000附近的磁力线 圈或永磁体产生,如下更详细地讨论的。定子5024可以由软磁材料制成, 通过施加外部磁场,所述软磁材料可以被选择性地磁化,且其磁极性能够被 选择性地控制。例如,定子5024可以由镍
‑
铁合金(例如,具有大约72
‑
83 %的镍)制成。通过控制定子5026的磁化和磁极性,当转子磁体元件5032 响应定子的变化的磁化和磁极性时,可以使转子5026以受控制的方式旋转, 如下进一步讨论的。
271.阀装置配置为使得转子5026的旋转控制弹簧5020以调节阀元件5016 抵靠阀座5018的偏压,从而调节孔的尺寸并控制流体通过阀装置的流动。 在一个实施例中,阀装置5000包括凸轮5048,凸轮5048与弹簧5020接合。 在示出的示例中,凸轮5048在圆柱形主体5034外侧的转子壳的底部与转子 壳5030成一体,而在一个实施例中,凸轮5048形成一个或多个阿基米德螺 旋的形状。
272.对于阀装置5000的某些应用(例如,诸如脑积水的治疗)阀的压力范 围可以是,例如,大约0
‑
300mm h2o,该压力范围是非常低的压力范围。 此外,可能希望在该范围内进行小的压力变化。然而,制造以下阀装置可能 是不可行的(由于制造限制等),在所述阀装置中凸轮能够进行非常微小的 运动,例如,几微米的量级。因此,为了适应低压范围和压力的小增量变化, 可能需要非常柔软的弹簧。通常,为了获得足够柔软的弹簧,弹簧将非常长。 然而,在可植入壳体内容纳非常长的柔软的弹簧可能带来挑战。因此,各方 面和实施例涉及产生杠杆或“齿轮减速”效果的弹簧配置,使得在低压设置中 凸轮的合理(即,在标准制造能力内)运动可以被转换成的非常小的调节。 特别地,某些实施例包括悬臂弹簧5020并在本文中描述。
273.如图52和图53最优地所示,凸轮5048和弹簧5020偏压抵靠阀元件 5016,且凸轮处于抵抗偏压弹簧400的最小张力的位置。在示出的实施例中, 弹簧5020是悬臂弹簧,并且包括偏压抵靠阀元件5016的第一弹簧臂5050 以及与凸轮5048直接或间接接触的第二悬臂5020。第一弹簧臂5050和悬臂 5052两者从支点5054(或弹簧的固定附连点)沿相同方向延伸。因此,悬 臂5052具有位于支点5054处的固定端和与凸轮5048接合的自由端。在一 个实施例中,弹簧5020的支点5054由下弹簧支撑件5056和上弹簧支撑件 5058固定到基座5002,所述下弹簧支撑件5056和上弹簧支撑件5058被插 入基座5002中形成的专用腔内。
274.在某些示例中,第一弹簧臂5050可以比第二悬臂弹簧臂5052长。在所 示的示例中,悬臂弹簧臂5052是“弯曲的”,包括拐点。凸轮5048的旋转引 起抵抗与凸轮接触的悬臂弹簧臂5020的压力,改变弹簧5020中的张力。该 压力通过弹簧结构扩散和减小,使得由第一弹簧臂5050施加以抵靠阀元件 5016所导致的压力可以非常低,并且特别地,可以在期望的范围内(例如, 如上所述的0
‑
200mm h2o),而不会对凸轮5048的旋转运动带来困难或不 可行的约束。通过适当地选择两个臂5050、5052的相对长度,以及每个臂 的宽度,可以实现杠杆或齿轮减速机构的等同。因此,使用短的双臂弹簧, 而不是传统的长弹簧,可以实现足够柔软的弹簧以提供某些应用所需的低压 力(例如,0
‑
200mm h2o)。
275.在一个实施例中,支点5054、第一弹簧臂5050以及悬臂5052配置为提 供杠杆效果使得由凸轮5048施加到第一臂的第一力由悬臂弹簧转换成抵靠 阀元件所施加的第二力,第二力小于第一力。
276.如图所示,随着凸轮5048旋转,施加的抵靠弹簧5020的力在从最小力 到最大力的
范围内以微小的增量调节或连续地调节。当凸轮5048处于由凸 轮施加的抵抗弹簧5020的最大压力的位置时,弹簧5020、第一弹簧臂5050 朝向阀元件5016移动。因此,阀装置5000的压力设置对于凸轮5048的该 位置是最高的。在一个示例中,由凸轮5048施加的抵抗弹簧5020的压力, 以及因此弹簧中的张力,随着凸轮的顺时针旋转而增大,如箭头216所示的。 但是,鉴于本公开的益处,本领域技术人员将理解到,转子510、凸轮212 和弹簧400可替代地配置为使得转子510的逆时针旋转增大弹簧400中的张 力。
277.如上所述,阀元件5016和阀座5018形成孔,流体通过该孔流动。入口 端口5010可以定向成使得流体在垂直于转子5026的中心轴线的方向上进入 孔(或者,换句话说,推动阀元件5016)。在某些方面,当入口端口5010 定向成使得流体沿垂直于转子5026的中心轴线的方向进入孔时,凸轮5048 直接或间接地产生弹簧5020的水平位移。
278.在本文中公开的阀装置5000的实施例中的凸轮5048成形为模仿阿基米 德螺旋;然而,凸轮在与弹簧5020接合的表面中可以具有恒定或线性斜坡、 分段线性斜坡、非线性斜坡以及这样的斜坡的组合。
279.根据某些示例,磁电机5022可以包括转子止动件或防止凸轮5048的360 度旋转的转子止动件5060,从而防止阀装置5000能够在一步内从完全打开 立即转换为完全关闭,或反之亦然。如图所示,转子止动件5060被提供在 转子5026的转子壳5030上以防止转子旋转超过最小转子压力位置。如图所 示,弹簧5020配置为与转子止动件5060接合以防止转子5026的旋转。第 二止动件(未示出)可以形成在阀装置5000的顶盖5014中以防止转子5026 旋转超过最大转子压力位置。凸轮5048可以顺时针或逆时针旋转到由转子 止动件5060设置的位置,且然后必须沿相反方向旋转。因此,需要凸轮5048 的完全旋转以使阀装置5000从完全打开转换到完全关闭,或反之亦然,而 不是仅是一小步或渐进的旋转。
280.在某些示例中,在制造阀装置5000之后,通常需要校准装置来调节压 力设置。例如,在某些实施例中,弹簧5020可以配置为使得它相对于每步 是线性的,也就是说,随着凸轮5048的每个旋转步,弹簧被张紧,使得阀 装置5000的压力增大了x量,并且这对于每个额外的旋转步都是如此。因 此,必要的是,校准阀装置5000以将凸轮5048设置在给定位置并将弹簧5020 预张紧到该位置的适当压力。因此,在组装阀装置5000之后并且在校准期 间,可能有氮气流(或一些其他流体)通过阀装置。
281.如上所述,在一个实施例中,磁电机5022包括十个转子磁体元件5032, 所述十个转子磁体元件5032被布置成圆圈,且配置为使得顺时针旋转增大 可编程阀装置5000的压力设置。如上所述,转子5026可以通过渐进的多个 步旋转,每步对应于阀装置5000的压力设置中限定的变化。还如上所述, 转子5026可以包括能够防止凸轮5048的360度旋转的转子止动件5060,从 而防止阀装置5000能够在一步内从完全打开立即转换为完全关闭,或反之 亦然。因此,当转子5026处于阀装置5000的最小压力设置的位置中时,转 子必须顺时针旋转,从而逐渐地增大阀装置的压力设置。转子止动件5060 防止逆时针旋转,所述逆时针旋转可能在一步内将阀装置5000从最小压力 设置转换成最大压力设置。同样地,当转子5026到达对应于阀装置5000的 最大压力设置的位置时,转子止动件5060防止凸轮5048的进一步顺时针旋 转,使得转子必须逆时针旋转,从而逐渐地减小阀装置的压力设置。
282.如上所述,阀装置5000包括x射线标记5040和5044,其可以在x射 线中被看到且指示转子5026的位置,以及因此指示阀装置的压力设置。在 一个示例中,x射线标记5040、
5044定位成使得在阀装置5000的最低压力 设置下,x射线标记5040、5044与凸轮5048的中心对准。x射线标记5040 固定在阀装置5000的基座5002中并且不随转子5026旋转,而x射线标记 5044随转子旋转。
283.在一些实施例中,x射线标记5040、5044包括钽。在一些实施例中,x 射线标记5040、5044包括钽球和/或钽珠。
284.植入式可编程阀装置5000还包括制动器组件以将转子5026锁定在位并 选择性地释放转子以进行编程。在一个实施例中,植入式可编程装置5000 还包括指示器,通常表示为5064,该指示器定位在转子壳5030内的柱5028 上方。指示器5064包括指示器壳体5066和径向地磁化的环状指示器磁体 5068,该径向地磁化的环状指示器磁体5068定位在指示器壳体内,且例如 由粘合剂或胶水固定到指示器壳体。这样的布置使指示器5064在暴露在外 部磁力时能够相对于转子5026旋转。植入式可编程阀装置5000还包括制动 器或稳定器,通常表示为5070,其被提供为一旦实现期望的压力时将转子 5026锁定在位。具体地,制动器5070包括圆形主体5072以及延伸超过主体 的一对径向相对的臂5074、5076,且当放置在转子5026的转子壳5030上方 时,臂5074、5076被接收在转子壳的台阶5036之间。制动器5070的主体 5072包括设计为适合柱5028的成型的端部的成型的开口5078以防止制动器 相对于柱旋转。这样的布置防止制动器5070相对于杆5028旋转,但一对臂 5074、5076能够被轴向地位移。
285.定位磁体5042定向或定位指示器5064,指示器5064包含径向地磁化的 磁体5068。指示器5064具有两个用途。一个用途是当编程器定位在阀装置 的顶部上时从台阶5036释放制动器5074以允许磁电机5022的转子5026旋 转。另一个用途是,每当编程器不在阀附近时,就是说,除了阀正在进行编 程之外的所有时间,指示器5064被两个定位磁体5042磁定向。监测器读取 指示器5064而不是定位磁体5042的角度或圆周取向。由两个相对小的定位 磁体5042产生的磁场不够强大到被外部监测器读取。指示器5064用作模拟 两个小定位磁铁5042的取向的磁放大器,其磁场强度足以由外部监视器读 取,然而,指示器必须能够在暴露在强大的外部磁场时(诸如由mri机器 产生的)自由地旋转,且不改变阀装置5000的压力设置。当带有植入阀的 患者被引入mri机器中时,指示器5064将根据mri机器的磁场的取向来自 行对准,但它不会从转子5026上被拉起。这允许转子5026保持静止,与制 动器接合。一旦患者离开mri机器,两个定位磁体5041重新对准指示器 5064,指示器5064然后可以被监测器读取。
286.当外部磁力,例如由编程器,施加到阀装置时,指示器5064被吸引到 外部磁力,将制动器臂5074、5076从转子5026抬起,从而使转子能够旋转 以允许阀装置的压力的改变。具体地,指示器5064沿着柱5028向磁力轴向 地移动,因此,在该具体的配置中,指示器5064的外边缘轴向地位移制动 器臂5074、5076。制动器5070的臂5074、5076从转子壳5030的台阶5036 之间的间隙移除以使转子5026能够旋转。同时地,定子5024被磁化以吸引 转子磁体元件5032,从而防止转子5026轴向地移动。
287.一旦实现期望的压力,外部磁场力可以被移除以使制动器臂5074、5076 能够移动回到制动器5070的臂5074、5076定位在转子壳5030的台阶5036 之间的位置。具体地,一旦外部磁场力被移除,指示器5064沿着制动器臂 5074、5076向转子5026移回,所述制动器臂5074、5076定位以将转子锁定 在位。
288.编程器装置
289.如上所述,由于阀装置5000的实施例包括磁致动转子5026,可以通过 定位编程器,其放置在植入式阀装置附近但在身体的外部来调节植入的可编 程阀装置的压力设置。编程器包括磁场发生器,以及各种控制和输入/输出 (i/o)部件,以允许用户(例如,医生)控制编程器来设置和可选地读取 植入式可编程阀装置5000的压力设置。在某些实施例中,磁场发生器可以 包括电磁体的布置。在其他实施例中,磁场发生器可以包括一个或多个永磁 体,并且阀编程器可以是电池操作的。
290.在一个实施例中,编程器配置为放置在患者头部上方,在植入式磁可编 程阀装置上方的位置。编程器包括磁场发生器,如下进一步讨论的,所述磁 场发生器施加磁脉冲以选择性地磁化定子5024,从而引起转子5026的旋转。 流体从脑室流过,通过脑室导管,进入入口连接器4908,通过植入阀装置5000,进入连接到连接器4912的远端导管,其然后在身体的远处位置(例 如心脏的右心房或腹膜腔)排出流体。编程器可以发送磁信号以影响转子 5026的旋转。编程器可以被用于产生磁脉冲,如下进一步讨论的,并且可以 例如联接到通信链路(诸如电缆或无线链路)。
291.参考图56a
‑
图59,本公开的实施例的编程器装置通常表示为5600。如 图所示,编程器装置5600包括壳5602,所述壳5602具有顶部5604(图56a 和图58)、底部5606(图57)以及连接壳的顶部和底部的连续的侧壁5608。 编程器装置5600的壳5602的尺寸被设置成适配在使用该编程器装置的医生 或专业人员的手内。编程器装置5600的顶部包括用户界面5610(包含液晶 显示器(lcd)5612),其将在下面被更详细地描述,以使医生能够对阀装 置5000进行编程。编程装置5600的侧壁5608包括两个编程开始按钮5614、 5616以开始编程器的编程序列并控制阀装置5000的操作。壳5602配置为支 撑编程器装置5000的部件。可选地,可以提供usb端口5670以对可充电 电池充电和/或修改或更新编程器装置5600的软件。
292.特别地参考图59,编程器装置5600的壳5602包括下壳5618和上壳 5620。下壳5618包括配置为接收电池(例如,四个aaa电池)的电池壳体 5622,以及配置为关闭电池壳体的电池盖5624。编程器装置5600还包括联 接到电池壳体5622的电机5626以及安装到电机的轴上的齿轮5628。在一个 实施例中,壳5602包括配置为在编程器装置被组装时支撑电机5626的支撑 件5630。在电池壳体5622中提供的电池向电机5626提供电源以驱动齿轮 5628的旋转。
293.编程器装置5600还包括具有中心轮毂(该中心轮毂配置为支撑磁体齿 轮5634)的磁体支撑件5632、滚珠轴承5636、磁性桥接板5638以及两个永 磁体(每个表示为5640)。这样的布置使齿轮5628配置为与磁体齿轮5634 接合以驱动由磁体支撑件5632保持的两个永磁体5640的旋转。在所示的实 施例中,磁体5640由两块形成,每块具有北侧和南侧,两侧都附连到磁性 桥接板5638。磁体5640配置为驱动转子磁体元件5032的旋转以对阀装置 5000进行编程。编程器装置5600还包括第一编程器电子板5642和第二编程 器电子板5644,其一起控制编程器装置的操作。
294.在一个实施例中,对于编程器装置5600的永磁体5640的每次旋转,阀 装置5000的转子5026旋转1/5圈。因此,编程器装置5600配置为提供阀装 置5000的转子5026的增量运动以精确地将转子定位在期望的压力处。此外, 在一个实施例中,对于编程器装置5600的永磁体5640的每次旋转,阀装置 5000的指示器5064旋转1转(1/1)。
中,编程器装置5600不能够作为安全特征进行操作直到磁屏蔽5660被移除。
301.监测器装置
302.参考图60a和图60b,本公开的实施例的监测器装置通常表示为6000。 监测器装置6000可以被用于监测阀装置5000的压力设置。它可以与编程器 装置5600协同使用以验证在编程装置5600对阀装置5000进行编程之前和/ 或之后的阀装置5000的压力设置。如图所示,监测器装置6000包括盘形壳 6002,该盘形壳6002具有顶部6004、底部6006以及连接壳的顶部和底部的 侧壁6008。
303.此外参考图61,监测器装置6000的壳6002的顶部6004包括lcd 6010 和中心开口6012,通过该中心开口6012,用户可以在使用期间查看监测器 装置的放置和操作。监测器装置6000的lcd 6010由医生使用以测量阀装置 5000的压力设置。壳6002的顶部6004还包括键盘箔以提供用于操作监测器 装置6000的用户界面6014。例如,示出阀装置5000的转子5026的位置的 刻度盘6016被提供在监测器装置6000的壳6002的顶部6004上。提供了配 置为操作(即,打开和关闭)监测器装置6000的开(on)/关(off)按钮 6018,以及压力调回按钮6020以访问之前读取的压力设置。可选地,可以 提供usb端口6070对可充电电池充电和/或修改或更新监测器装置6000的 软件。
304.参考图62和63,监测器装置6000的壳6002包括下壳6022和上壳6024。 监测器装置6000的下壳6002包括电池壳体6026,电池壳体6026配置为包 含一个或多个电池为监测器装置6000的操作供电。提供了电池盖,其一起 表示为6028,以遮盖电池壳体6026。
305.监测器装置6000还包括监测器电子板6034和监测器传感器板6036,监 测器传感器板6036被提供以定位和检测阀装置5000的指示器5064的角度 或圆周取向以确定阀装置的压力设置。监测器装置6000还包括提供在监测 器组件6034顶部的罗盘桥6038。在一个实施例中,罗盘桥6038是塑料盖, 该塑料盖是壳6002的一部分。罗盘桥6038的一个用途是保护传感器。
306.参考图64和图65,监测器传感器板6036包括第一(顶部)表面6040 (图64)和第二(底部)表面6042(图65)。监测器传感器板6036包括圆 形中心体6044,该圆形中心体6044具有终止于第一凸部的第一臂6046和终 止于第二凸部的第二臂6048。特别地参考图65,中心体6044包括四个传感 器(每个表示为6050),它们配置为检测阀装置5000的指示器5064的径向 地磁化的磁体5068以及当将监测器装置放置在阀装置上方时使监测器装置 6000在阀装置上居中。因此,监测器装置6000配置为在通过使用监测器装 置和编程器装置5600(以如下描述的方式)对阀装置进行编程的过程期间在 阀装置5000上自居中。在一个实施例中,监控器装置6000包括灯的圆形阵 列,其指示用户监测器需要沿哪个方向移动以实现其在阀装置5000上的精 确居中。
307.监测器传感器还包括表示为6052的第五传感器,其被相对于四个传感 器6050居中地定位。这个传感器6052配置为测量阀装置5000的指示器5064 的角度或圆周取向以确定阀装置的压力设置。指示器5064的角度或圆周取 向与转子5026的角度或圆周取向直接相关,所述转子5026的角度或圆周取 向与阀装置5000的压力设置直接相关。在一个实施例中,每18度的旋转对 应于特定的阀装置5000的压力。一对发光二极管(led),每个表示为6054, 被提供用于在使用监测器装置6000时把光照到患者上。第一臂6046的第一 凸部包括测量地球磁场和/或任何其它存在的磁场的第一磁传感器6056。类 似地,第二臂6048的
第二凸部也包括测量地球磁场和/或任何其它存在的磁 场的第二磁传感器6058。在将监测器6000放置在紧靠阀装置5000的位置之 前,磁传感器6048和磁传感器6056读取外部磁场以便之后从传感器6052 的读数中减去它们。这使得传感器6052能够精确地读取指示器5064的角度 或圆周取向而不考虑其它外部磁场。
308.与编程器装置5600一样,监测器装置6000包括形成在监测器装置的底 部6006上的模制腔6060(图60b)。腔6060的形状和尺寸被设置成至少大 致对应于植入阀装置5000的形状和尺寸。腔6060包括限定在壳6002的底 部6006中的一对通道。该通道的形状和布置可以被设置成使得,当监测器 装置6000被放置在患者头部上在植入式阀装置5000上方时,通道与流入导 管和引流导管对准,从而有助于正确地将监测器装置与植入式阀装置对准。
309.定位盘
310.参考图66和图67,本公开的实施例的定位盘通常表示为6600。在示出 的实施例中,定位盘6600包括具有切口6604的薄主体6602,切口6604配 置为接收由植入式阀装置5000产生的凸出部分以在使用期间引导定位盘。 定位盘被放置在阀装置5000上方,使得在定位盘上的箭头6610指示阀装置 5000内流体流动的方向。定位盘6600的主体6602还包括带有定位特征6608 的凹陷部分6606,定位特征6608配置为在定位盘上安置监测器装置6000。 在使用期间,定位盘6600的切口6604定位在阀装置5000的上方以将定位 盘大致定位在患者上。一旦大致定位,监测器装置6000被定位在凹陷部分 6606内且定位特征6608被接收在提供在监测器装置上的配合特征内。此时, 操作监测器装置6000使监测器装置在阀装置5000上居中。如图所示,监测 器装置6000可以与定位盘6600一起朝着由监测器指示的方向移动,以使定 位盘和监测器装置两者都相对于阀装置5000居中。
311.一旦居中,监测器装置6000可以从定位盘6600上移除,将定位盘留在 原位,而编程器装置5600现在可以被定位在定位盘上以对阀装置5000进行 编程。与监测器装置6000一样,编程器装置5600被定位在凹陷部分6606 内且定位特征6608被接收在提供在编程器装置上的配合特征内。
312.改进的阀、编程器装置以及监测器装置的操作
313.图68示出具有磁屏蔽5660的编程器装置5600、经由usb端口6070 连接到电源线6620的监视器装置6000,以及设置在监测器装置下的定位盘 6600。
314.在某些实施例中,阀装置5000要求定期监测以确保实现适当压力。在 其它实施例中,阀装置5000要求定期重新编程以增大或减小压力。当监测 压力时,将定位盘6600如所参考地放置在阀装置5000上方,使得定位盘的 开口在其中接收植入式阀装置的轮廓,并且将监测器6000装置放置在定位 盘上。操作监测器装置6000使检测器装置和定位盘6600在阀装置5000上 居中。一旦居中,监测器装置6000将检测阀装置5000的现有压力,其显示 在lcd 6010上。阀装置5000的转子5026的定位也可以在监测器装置6000 的用户界面6014上的刻度盘6016上被检测。如果检测到的压力由医生确定 是可接受的,监测器装置6000由开/关按钮6018关闭,且从患者处移除监测 器装置和定位盘6600。
315.如果检测到的压力由医生确定是不可接受的,或者如果阀装置5000已 被安排要被重新编程,从定位盘6600上移除监测器装置6000且监测装置 6000由开/关按钮6018关闭。一旦监测器从定位盘6600上移除,编程器装 置5600由开/关按钮5652打开。一旦启动,医生通过操纵如上所述地加号(+) 按钮5648和减号(
‑
)按钮5650在编程器装置5600上选择
压力(例如,100 mm h2o)。在一些实施例中,编程器装置5600可以被编程以预设压力,例 如,70mm h2o。一旦压力被选定,编程器装置5600被放置在定位盘6600 上,并按下开始按钮5614或开始按钮5616中的任一个以启动编程序列。编 程器装置执行如上所述的重新设置操作,然后设置阀装置5000的压力到选 定的压力或预设压力。具体地,编程器装置5600的磁体5640被磁化以抬起 指示器5064以及抬起制动器臂5074和制动器臂5076,以释放磁电机5022 的转子5026。阀装置5000的转子磁体元件5032被定子5024操纵,定子5024 以类似于阀装置100的方式被编程器装置5600的磁体5640依次磁化,以旋 转转子5026到选定的位置和压力。一旦转子5026被移动到适当的定位,编 程器从植入式阀装置5000上被抬离,允许指示器5064回到它的静止定位, 在该静止位置,制动器5070被定位在转子5026的台阶5036之间以将转子 锁定在位。编程器装置5600从患者上被移除并由开/关按钮5652关闭。医生 可以用监测器重复该循环以验证阀装置5000被正确地编程。一旦压力被验 证,医生可以从患者上移除监测器装置6000和定位盘6600。
316.根据某些实施例,可以通过向可编程的植入阀装置5000附近施加脉冲 磁场来进行阀压力调节。一旦定位盘5600由监测器装置6000居中放置,通 过使用定位盘6600将编程器装置5600放置在植入式阀装置5000附近。在 所示的实施例中,编程器装置5600的磁体5640配置为操作阀装置5000的 转子5026。植入式阀装置5000的可磁操作的电机5022包括转子5026,转 子5026在转子壳5030的通道中具有布置有交替的磁极性的十个转子磁体元 件5032。磁电机5022还包括定位在转子5026下方的定子5024,定子5024 被编程器装置5600磁化。
317.阀装置5000的操作类似于阀装置200的操作。例如,编程器装置5600 的磁体5640可以是永磁体或被激励以具有面向定子5024的北极或南极,或 者每个都可以完全保持断开。阀装置5000的转子5026在期望的方向上并通 过期望的角度的运动是通过永磁体的运动或以之前描述的序列激励电磁体 来实现的,其进而磁化定子5024,定子5024然后吸引或排斥转子磁体元件 5032(取决于极性),从而引起转子5026的旋转。
318.因此,使用具有如上讨论的磁电机的植入式阀装置5000,与包括编程器 装置5600和监测器装置6000的外部控制器一起,可植入阀装置的压力设置 可以以小增量进行无创地控制和测量。可以设计和校准凸轮5048的配置和 弹簧5020中的张力,使得转子5026的每个角度增量产生阀装置5000的压 力设置中明确限定的选定的变化(例如,10mm h2o)。在一个示例中,编 程器装置5000可以配置为允许用户输入阀装置5000的期望压力设置。在一 个实施例中,编程器装置5600可以配置为将阀装置的压力设置为从0至300 mm h2o,从0至180mm h2o以10mm为增量,以及从180mm至300mmh2o以40mm为增量。在一个实施例中,默认或预设压力为70h2o。
319.在一个示例中,为确保阀装置5000的精确压力设置,编程器装置5600 可以配置为首先启动逆时针旋转序列以将阀装置设置成其完全打开位置,然 后启动顺时针旋转序列以将阀装置设置成由用户输入的选定的压力设置。根 据某些示例,当逆时针旋转序列被启动时,编程器装置5600配置为致动转 子5026以旋转通过足够的逆时针步数,使得转子将被定位成使得阀装置 5000具有其最低压力设置。如上所述,转子止动件5060的存在防止转子5026 继续旋转超过最小压力设置定位。在编程器装置5600停止逆时针旋转序列 之后,它可以从已知位置(对应于最小压力设置且具有转子止动件5060的 位置)开始顺时针序列。
编程器装置5000可以致动转子5026以旋转通过选 定的顺时针步数,以便将阀装置5000编程为由用户选定的压力设置。
320.尽管上面讨论的示例使用转子5026的顺时针旋转对阀装置5000的压力 设置进行编程(以及逆时针旋转以将转子5026设置在从其开始编程序列的 已知位置),但是本领域技术人员将认识到,鉴于本公开内容的益处,系统 (阀装置5000、编程器装置5600、监测器装置6000以及定位盘6600)可以 替代地配置为用于相反的布置,即使用转子5026的逆时针旋转对阀装置 5000的压力设置进行编程(以及顺时针旋转以将转子设置在从其开始编程序 列的已知位置)。
321.可以使用充分描述的外科手术方法将阀组件4900的实施例植入患者中。 在手术植入之前,可以将阀装置5000的压力设置调节到期望压力设置。在 一个方面,工作压力可以设置为近似等于患者的脑室csf压力,使得在手术 后不会发生压力变化。在患者从手术中恢复之后,可以如期望的调节压力设 置。例如,在患有nph的患者中,可以减小压力设置以便开始减小脑室的 尺寸。可以对压力设置另外进行额外调节。例如,一旦脑室的尺寸充分减小, 就可以增大阀的压力设置。如将认识到的,植入式阀装置的使用准许在治疗 患者的过程中根据需要从外部调节阀装置的压力设置。
322.在某些实施例中,治疗脑积水的方法包括植入阀组件4900的实施例, 该阀组件4900具有在患者大脑的脑室腔内的脑室导管以及连接到连接器的 远端导管,该连接器安装在患者身体中的远处位置处,流体要在该位置处被 引流。身体的csf引流的远处位置包括,例如,心脏的右心房以及腹膜。
323.除了脑积水之外,还有与过量流体积聚相关的若干其他病症,并且可以 通过使用适当设计的流入导管将流体引流到身体的另一部分来治疗。这样的 病症包括,例如,慢性心包积液、慢性肺积液、肺水肿、腹水和眼内青光眼。 可以设想到的是可编程阀装置的实施例可以被用在这些病症的治疗中。
324.如上所述,本文所述的阀(包括阀装置5000)的压力设置可以以许多离 散的步或增量调节,或者在预定范围内连续调节。本文所述的阀的实施例的 压力可以从低压力(例如,0mm h2o)变化到高压力(例如,300mm h2o)。 大多数传统的阀仅具有高达200mm h2o的压力,并且只可以在每次压力设 置之间以相对较大的增量进行调节。
325.以上已经描述了至少一个实施例的几个方面,应当认识到,本领域技术 人员将容易想到各种改变、修改和改进。这样的改变、修改和改进旨在为本 公开的一部分,并且旨在落入本发明的范围内。因此,前面的描述和附图仅 是示例性的,并且本发明的范围应该由所附权利要求及其等同物的适当构造 来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1