一种基于智能机械臂的自动化寻脉取脉装置及方法
1.本发明涉及一种自动寻脉方法,更具体的说,是涉及一种基于智能机械臂的自动化寻脉取脉装置及方法。
背景技术:
2.脉诊在中华民族历史渊源非常悠久,从古至今有许多的文献记载了脉诊的理论方法和应用。脉诊的各种优点使其在现代临床医学中展现出独特的优势,首先从诊断方法上讲,脉诊能够直接的接触到病人身体,由心脏博动而产生的脉搏波包含着丰富的人体生理信息,在现代临床医学中通过感受脉搏波诊断病情可信度较高;其次,脉诊具有无创伤、高效、经济的优点,能从辨析脉象来了解疾病发生、发展以及变化的内在机理从而实现“治未病”的目的。
3.中医诊脉传统方法主要是中医师使用中指在桡骨茎突确定关位,然后食指和无名指分别放在尺位和寸位,手指指腹施加不同的力度来感受脉象信息从而对患者进行综合诊断。然而中医师通过自己对于脉搏的感受和经验判断病症,有着“心中了了,指下难明”的特点,这使得中医脉诊学的学习变得难以掌握,中医诊脉的传承和推广难度也提高。而实际上,由于脉象的动态发展变化是客观存在的,先贤们才能在长时间的实践中总结出脉象的统一概念表述。因此,运用现代工程技术方法分析脉搏信号特点并实现脉象诊断的客观化、标准化是具有深刻意义的。
4.目前已经有许多国内外学者和研究人员对中医脉诊客观化展开研究,他们使用各种中医脉诊理论设计了不同的脉象采集仪器来模拟中医取脉的过程,并结合中医理论对脉象信息进行分类诊断,目前,市场上现存的脉象研究设备已经有很多,许多产品也推向了市场,为医学应用和人们日常生活提供了一些的使用价值,但是仍存在一些不足之处。这些设备往往需要用户在专业医护人员的帮助下才能够精准地找到采脉位置,而且也无法模拟中医师取脉时根据不同人而施加的不同的压力,这就在很大程度上限制了脉诊仪在普通家庭和社会中的推广,其次现有的手动固定位置使得采集的信号重复性较差,这使得中医脉诊系统的发展受到限制。
技术实现要素:
5.本发明的目的是为了克服现有技术中的不足,提出一种基于智能机械臂的自动化寻脉取脉装置及方法,能够准确且可重复的找到最佳取脉位点,根据不同情况施加不同的压力为出发点,结合智能机械臂dobot与压力传感器联合建立智能中医采集系统,结合寸关尺理论位置和长度研究,控制机械臂运动依次遍历腕部寻找寸、关、尺三部取脉位置并采集三部脉象信息分别得到最佳取脉位点,降低了用户对脉诊仪自行操作的门槛。智能机械臂的使用代替人手的寻脉功能,既提高了脉诊设备采集的可重复性,也为脉诊设备的自动化、智能化提供了技术思考。
6.本发明的目的可通过以下技术方案实现。
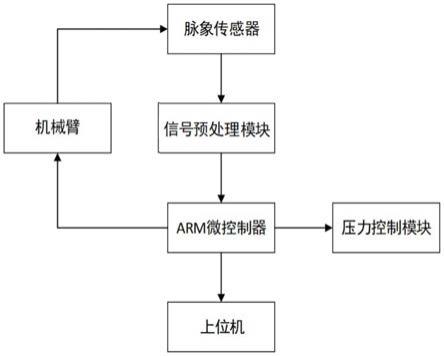
7.本发明基于智能机械臂的自动化寻脉取脉装置,由机械臂、arm微控制器、脉象传感器、信号预处理模块、压力控制模块和上位机构成;所述arm微控制器分别与机械臂、信号预处理模块信号输出端、压力控制模块、上位机电连接,所述脉象传感器通过微型气囊设置于机械臂末端中心,所述脉象传感器与信号预处理模块信号输入端电连接,所述压力控制模块通过输气管连接微型气囊;
8.所述脉象传感器用于采集脉象信号;所述信号预处理模块用于对采集到的脉象信号进行放大滤波处理,得到包括静压信号和动压信号的模拟信号;所述arm微控制器用于将模拟信号转换为数字信号,根据检测到的静压信号对机械臂发送移动命令,调整机械臂找到手腕位置,控制压力控制模块进行加减压,根据动压信号大小找到正确取脉位点,采集脉象信息;所述上位机用于实时显示脉象波形,根据波形计算脉率和压力。
9.所述机械臂采用越疆者公司的dobot机械臂。
10.所述arm微控制器采用arm cortex_m3内核的stm32f103vet6微控制器,用于脉象信号的采集、分析和传输,以及机械臂的移动控制和压力控制。
11.所述脉象传感器采用儒为压力传感器,所述脉象传感器固定于微型气囊底部,微型气囊固定于机械臂末端中心。
12.所述压力控制模块由气泵构成,arm微控制器控制气泵对微型气囊进行充放气,从而模拟指腹加减压。
13.本发明的目的还可通过以下技术方案实现。
14.本发明基于智能机械臂的自动化寻脉取脉方法,包括以下过程:
15.(1)相对位置的确定:基于智能机械臂的自动化寻脉取脉装置中的机械臂和脉枕位于同一平面上,脉枕短边靠近机械臂设置,脉枕短边中轴线与机械臂x轴方向重合,脉枕短边与机械臂下侧沿之间距离至少为10厘米;
16.(2)机械臂寻脉的初始位点:手腕沿脉枕长边中轴线放置,位于机械臂末端脉象传感器下方,脉枕的长边沿中间位置设为机械臂初始位点的坐标原点,脉象传感器与手腕距离100mm处为初始位点的z坐标;
17.(3)机械臂智能五点寻脉法:
18.①
从初始位点x坐标加5mm,由寸口脉起于鱼际横线后一分,y坐标减5mm,此为第一个寻脉采集点;
19.②
打开arm微控制器,同时给机械臂发送下降指令,让机械臂按一定长度下降,当脉象传感器接触到手腕时静压信号值会有变化,当静压信号值大于0.1时停止机械臂下移的指令;
20.③
打开压力控制模块施加压力,采集动压信号并储存在arm微控制器的数据缓存区的变量数组中,提取并记录动压信号最大值作为变量,并保存机械臂在此位置的坐标值;
21.④
采集步骤
③
所保存位置的脉象30s后,关闭压力控制模块,控制机械臂沿z轴正方向移动5mm,x轴正方向移动5mm,重复步骤
②
至
④
依次沿x轴方向移动4次,共得到5个点,依次对比这5个点脉象的动压信号最大值,最后保存最大动压信号峰值处机械臂末端坐标数值,确定此点为寸部最佳取脉位点,并再次移动至该坐标点进行脉象复采集,并上传上位机;
22.(4)以寸部最佳取脉位点为参考点向关部移动10mm作为关部取脉的起始点,重复
机械臂智能五点寻脉法中步骤步骤
②
至
④
采集关部取脉的起始点的数据及其左右各两个点的数据,并上传上位机;其中关部取脉共五个点,两点间的间隔均为5mm;
23.(5)以关部最佳取脉位点为参考点向尺部移动10mm作为尺部取脉的起始点,重复机械臂智能五点寻脉法中步骤步骤
②
至
④
采集关部取脉的起始点的数据及其左右各两个点的数据,并上传上位机;其中尺部取脉共五个点,两点间的间隔均为5mm;
24.(6)上位机实时显示脉象波形,根据波形计算脉率和压力。
25.与现有技术相比,本发明的技术方案所带来的有益效果是:
26.本发明解决了现有中医脉诊设备往往需要用户在专业医护人员的帮助下才能够精准地找到采脉位置并且无法找到最佳取脉压力的问题,使用智能机械臂来进行自动寻脉,用户只需要提前固定好电脑、机械臂和人手臂的相对位置,机械臂就会自动开始寻脉,寻脉过程全自动化,机械臂会按照写好的程序进行自动寻脉,同时,机械臂上的气泵会模拟中医师的指腹给桡动脉进行加减压,以找到最佳取脉压力,这个过程的全自动化解决了传统脉诊主观性太强,需要靠中医师自己判断的问题,使中医脉诊变成了科学客观的过程,也降低了中医脉诊的学习门槛,有利于中医脉诊的深入发展。
附图说明
27.图1是本发明基于智能机械臂的自动化寻脉取脉装置的原理图;
28.图2是本发明中机械臂坐标系示意图;
29.图3是本发明中机械臂末端微型气囊和脉象传感器实物图;
30.图4是本发明中机械臂与脉枕相对位置示意图。
具体实施方式
31.下面结合附图对本发明作进一步的描述。
32.如图1所示,本发明基于智能机械臂的自动化寻脉取脉装置,主要由机械臂、arm微控制器、脉象传感器、信号预处理模块、压力控制模块和上位机构成。
33.所述机械臂与arm微控制器电连接,采用越疆者公司的dobot机械臂,它具有丰富的i/o扩展接口,使用它的扩展接口与单片机连接进行二次开发,使用自带二次开发通讯协议进行程序的编写,并通过调用机械臂命令函数实现机械臂的回零、运动模式的设置和末端坐标在四个自由度的移动。本发明使用的机械臂及使用过程中的坐标系如图2所示。
34.所述arm微控制器还分别与信号预处理模块信号输出端、压力控制模块、上位机电连接,采用arm cortex_m3内核的stm32f103vet6微控制器,用于脉象信号的采集、分析和传输,以及机械臂的移动控制和压力控制。arm微控制器集成度高,封装小,内部集成了ad转换器和usb接口模块。通过arm微处理器对机械臂发送移动命令,运用arm微控制器自身的ad转换器将模拟信号转换为数字信号,根据检测到的静压信号调整机械臂找到手腕位置,然后控制压力控制模块进行加减压,根据动压信号大小找到正确取脉位点,采集脉象信息。同时为了提高采集效率,在arm微控制器的内存空间开辟4kb的数据缓存区,每次a/d转换结束后,通过dma技术,将adc转换的12位数据顺序搬移到数据缓冲区中,待缓冲区满后,通过usb通信方式将脉象数据发送到上位机,上位机实时显示脉象波形,根据波形计算脉率和压力等参数。
35.所述脉象传感器采用儒为压力传感器,固定于微型气囊底部,微型气囊固定于机械臂末端中心,也就是说脉象传感器通过微型气囊固定于机械臂末端中心进行脉象信号的采集,如图3所示。所述脉象传感器与信号预处理模块信号输入端电连接,采集到的脉象信号经信号预处理模块进行放大滤波处理,得到包括静压信号和动压信号的模拟信号,使信号输出能够调整到arm微控制器内ad转换器的采集电压范围。
36.在中医脉诊中,中医师使用指腹对患者寸关尺三部进行加压,通过指腹感知脉动波来获取患者生理病理信息,中医师往往会不断调整指腹压力,直至能够感知到一个最明显的脉搏波动,此时指腹对桡动脉施加的压力即为最佳取脉压力,而此时的脉搏波峰值最大,信号也越明显。在使用传感器对桡动脉正向施压过程中,传感器对皮肤的力与软组织和桡动脉的回弹力是相反的,采集过程会有很大的干扰,而在减压过程中,减压方向与回弹力方向一致,能够在一定程度上减少时间漂移和压力漂移。为了获取最佳取脉压力,在找到取脉位点时,本发明基于智能机械臂的自动化寻脉取脉装置中的压力控制模块由气泵构成,通过输气管连接微型气囊,arm微控制器控制气泵对微型气囊进行充放气,从而模拟中医师的指腹对桡动脉加减压,通过分析加压过程中的脉象数据的变化即可得到最佳取脉压力所述压力控制模块从而模拟指腹加减压。
37.本发明基于智能机械臂的自动化寻脉取脉方法,针对现有的脉诊仪需要依靠中医师来寻找取脉位点,且取脉位点的重复性较差,无法模拟中医师施加相应压力的过程,采集者也需要有一定的脉诊理论的这些问题,设计了使用dobot机械臂结合新型压力传感器来进行寻脉和取脉,固定人的手臂和机械臂的相对位置,并使用微控制器控制机械臂来实现机械臂的自动寻脉,找到最佳取脉位点,通过气泵进行加减压模拟中医师指腹的加减压,微控制器根据加减压时所得到的脉象数据分析处理。具体过程如下:
38.(1)相对位置的确定
39.基于智能机械臂的自动化寻脉取脉装置中的机械臂和脉枕位于同一平面上,脉枕短边靠近机械臂设置,脉枕短边中轴线与机械臂x轴方向重合,脉枕短边与机械臂下侧沿之间距离至少为10厘米。
40.例如:本发明基于智能机械臂的自动化寻脉取脉装置中各部件与患者的相对位置如图4所示。其中,电脑端右侧沿与机械臂左侧沿之间的水平距离为20厘米,机械臂右侧沿与实验桌台右侧桌沿距离为65厘米,机械臂上侧沿与实验桌台上侧沿距离为10厘米,机械臂下侧沿与脉枕上沿(短边)距离为10厘米,脉枕上下沿长度为20厘米,脉枕右侧沿与右侧桌沿距离为60厘米。脉枕短边中轴线与机械臂x轴方向重合。各设备仪器之间的固定相对位置保证了本系统的机械臂三维位点坐标设定的实现。
41.(2)机械臂寻脉的初始位点
42.在各设备位置相对固定的情况下,首先确定机械臂寻脉的初始位点,以固定的初始位点开始沿着手腕寻找桡动脉位点。手腕沿脉枕长边中轴线放置,位于机械臂末端脉象传感器下方,脉枕的长边沿中间位置设为机械臂初始位点的坐标原点,脉象传感器与手腕距离100mm处为初始位点的z坐标。患者将手腕放置在脉枕上,手腕处能够看到明显的分界线,这条线在中医学上叫鱼际横纹,将鱼际横纹和手腕内侧虎口交界点处放在脉枕长边中间处,不论有没有中医知识都能顺利找到参考点,并将手腕放在固定位置。根据《难经》记载的寸关尺的长度和位置可知,关为寸尺分界点。吴培总结大量寸关尺测量结果,并将之与传
统中医书籍中寸口脉长度对比,得出现代成年人寸关尺长度为3.16
±
0.43cm较为合理,依据人的身高不同有所调整。本系统就以这一参考为依据来对寸关尺的取脉位点进行定位。
43.(3)确定了各仪器和患者的相对位置之后即可进行寻脉,机械臂智能五点寻脉法过程如下:
44.①
从初始位点x坐标加5mm,由寸口脉起于鱼际横线后一分,y坐标减5mm,此为第一个寻脉采集点;
45.②
打开arm微控制器,同时给机械臂发送下降指令,让机械臂按一定长度下降,当脉象传感器接触到手腕时静压信号值会有变化,当静压信号值大于0.1时停止机械臂下移的指令;
46.③
打开压力控制模块施加压力,采集动压信号并储存在arm微控制器的数据缓存区的变量数组中,提取并记录动压信号最大值作为变量,并保存机械臂在此位置的坐标值;
47.④
采集步骤
③
所保存位置的脉象30s后,关闭压力控制模块,控制机械臂沿z轴正方向移动5mm,x轴正方向移动5mm,重复步骤
②
至
④
依次沿x轴方向移动4次,共得到5个点,依次对比这5个点脉象的动压信号最大值,最后保存最大动压信号峰值处机械臂末端坐标数值,确定此点为寸部最佳取脉位点,并再次移动至该坐标点进行脉象复采集,并上传上位机。
48.(4)以寸部最佳取脉位点为参考点向关部移动10mm作为关部取脉的起始点,重复机械臂智能五点寻脉法中步骤步骤
②
至
④
采集关部取脉的起始点的数据及其左右各两个点的数据,并上传上位机。其中,关部取脉共五个点,两点间的间隔均为5mm。
49.(5)以关部最佳取脉位点为参考点向尺部移动10mm作为尺部取脉的起始点,重复机械臂智能五点寻脉法中步骤步骤
②
至
④
采集关部取脉的起始点的数据及其左右各两个点的数据,并上传上位机。其中,尺部取脉共五个点,两点间的间隔均为5mm。
50.(6)上位机实时显示脉象波形,根据波形计算脉率和压力等参数。
51.尽管上面结合附图对本发明的功能及工作过程进行了描述,但本发明并不局限于上述的具体功能和工作过程,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1