一种手持式脊柱手术高精度定位机械臂
1.本发明涉及一种定位机械臂,具体涉及一种手持式脊柱手术高精度定位机械臂,属于手术机器人技术领域。
背景技术:
2.随着微创手术技术的发展,骨科手术对手术过程的安全性与精确性要求也越来越高。其中,手术过程中医疗器械的精确定位是手术过程中的关键。脊柱手术机械臂主要用于脊柱手术过程中手术器械的定位,从结构上可以分为串联结构与并联结构两种,目前串联结构一般体积较大,会对医疗人员的操作产生干涉,且由于串联关节误差的叠加,会导致累计误差而降低精度;而并联机构结构与控制系统设计复杂,且工作空间有限。因此,结合现有研究,需要开发一种结构紧凑、体积小、精度高且易于控制的脊柱手术机械臂。
3.现有脊柱手术机器人的交互模式主要有监控模式与遥控模式两种,监控模式指机器人按照预先规划好的路径运动,操作人员只在机器人出现重大故障时进行急停操作;遥控模式也被称为主从操作,指操作人员可以在手术室以外的地方通过遥控手柄,远程控制机器人完成操作。无论是监控模式还是遥控模式脊柱,手术机器人在脊柱手术过程中均存在定位精度低,占据空间大、人与机器人交互性差的问题
4.综上所述,现有的脊柱手术机器人存在定位精度低,占据空间大、人与机器人交互性差的问题。
技术实现要素:
5.本发明的目的是为了解决现有的脊柱手术机器人存在定位精度低,占据空间大、人与机器人交互性差的问题。进而提供一种手持式脊柱手术高精度定位机械臂。
6.本发明的技术方案是:一种手持式脊柱手术高精度定位机械臂,它包括工作床、水平移动臂、竖直移动臂、大臂、小臂和末端执行机构,工作床水平布置,水平移动臂垂直安装在工作床的侧边,且水平移动臂可滑动安装在工作床上,竖直移动臂竖直滑动安装在水平移动臂上,大臂的一端安装在竖直移动臂上,大臂的另一端与小臂连接,末端执行机构与小臂连接。
7.本发明与现有技术相比具有以下效果:
8.1、本发明采用手持式方式进行操作,在继承了机器人操作的稳定性的同时,也发挥了操作人员随机应变的优势。
9.2、本发明采用两移动关节与两转动关节串联的四自由度结构,结构紧凑的同时保证工作空间并能提高精度。
10.3、本发明的机械臂具有手持随动功能,通过对重力、惯量、磨擦和粘滞阻力等动力学参数进行辩识和补偿,实现对机械臂更轻快的拖动,并且,机械臂的刚度可以滤除人手部的震颤,从而提高机械臂手持随动操作模式下高精度和灵巧的操作。
附图说明
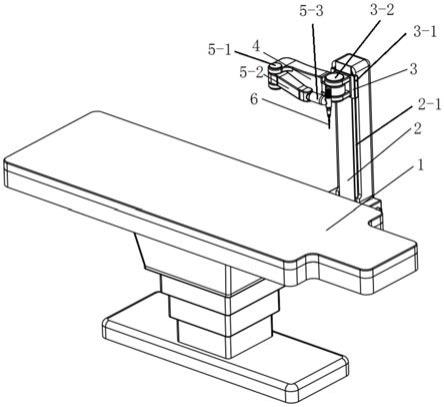
11.图1是本发明的轴测示意一图;图2是本发明的轴侧示意图二。
具体实施方式
12.具体实施方式一:结合图1和图2说明本实施方式,本实施方式的包括工作床1、水平移动臂2、竖直移动臂3、大臂4、小臂5和末端执行机构6,工作床1水平布置,水平移动臂2垂直安装在工作床1的侧边,且水平移动臂2可滑动安装在工作床1上,竖直移动臂3竖直滑动安装在水平移动臂2上,大臂4的一端安装在竖直移动臂3上,大臂4的另一端与小臂5连接,末端执行机构6与小臂5连接。
13.本实施方式的手术机器人采用沿床导轨设计,机械臂的大行程移动自由度集成于手术床,使得整体的工作空间更加紧凑,能够使机器人不占用手术台周边区域面积,利于机器人辅助脊柱手术系统和人员空间布局,而图1中机器人缺乏该种自由度设计,占用空间大。
14.另外,本实施方式沿工作床导轨的设计使得机器人在水平方向有更大的工作空间的同时,可以实现更小的机器人体积实现满足脊柱手术的可达空间需求,并且,避免了操作臂坐标系与手术操作坐标系的标定,提高了手术操作精准度和效率。
15.本发明所述的手持式脊柱手术机械臂主要由沿着水平方向移动的水平移动臂与竖直方向移动的竖直移动轴臂以及两个在水平面内摆动的大臂和小臂组成。采用床边安装的方式,直接将水平移动臂连接在工作台上的侧轨上,将竖直移动臂安装在水平移动臂上的竖直导轨上,大臂连接在竖直移动臂上使其可以在水平面内摆动,小臂连接在大臂上与大臂在同一平面内摆动。机械臂一共有四个自由度,四自由度的形式与传统六自由度机械臂相比在满足工作空间需求的同时,增强了末端执行机构的稳定性,同时结构紧凑,占用空间小。
16.在使用过程中,操作人员可以手持机械臂末端引导机械臂执行机构移动定位,该构型在水平面内有良好的顺从性,易于操作人员手持操作,同时保证竖直方向的刚度。手持式的操作实现了人与机器人的高度耦合,在继承了机器人操作的稳定性的同时,也发挥了操作人员随机应变的优势,实现对手术环境的兼容。
17.具体实施方式二:结合图1和图2说明本实施方式,本实施方式还包括侧轨1
‑
1和水平移动滑块7,侧轨1
‑
1水平安装在工作床1的侧端面上,水平移动滑块7安装在水平移动臂2的下部,且水平移动滑块7与侧轨1
‑
1之间滑动连接。如此设置,便于水平移动臂2沿工作床1进行移动。其它组成和连接关系与具体实施方式一相同。
18.具体实施方式三:结合图1和图2说明本实施方式,本实施方式的水平移动臂2沿其竖直方向上开设有滑槽2
‑
1。如此设置,便于竖直移动臂3在竖直方向上滑动。其它组成和连接关系与具体实施方式一或二相同。
19.具体实施方式四:结合图1和图2说明本实施方式,本实施方式的竖直移动臂3包括竖直移动滑块3
‑
1和转轴3
‑
2,竖直移动滑块3
‑
1与滑槽2
‑
1滑动连接,转轴3
‑
2安装在竖直移动滑块3
‑
1上,大臂4的一端与转轴3
‑
2绕转轴3
‑
2的轴线转动连接。如此设置,结构简单,便于在实现竖直方向的移动的前提下,还能够实现转动。其它组成和连接关系与具体实施方式一、二或三相同。
20.具体实施方式五:结合图1和图2说明本实施方式,本实施方式大臂4包括连接臂体4
‑
1和连接卡槽4
‑
2,连接卡槽4
‑
2与连接臂体4
‑
1的一端固定连接并支撑一体。如此设置,便于与小臂和竖直移动臂3连接,同时提供转动副。其它组成和连接关系与具体实施方式一、二、三或四相同。
21.具体实施方式六:结合图1和图2说明本实施方式,本实施方式的连接卡槽4
‑
2上设有两个连接耳4
‑
3。如此设置,便于与小臂转轴5
‑
1转动连接。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
22.具体实施方式七:结合图1和图2说明本实施方式,本实施方式小臂5包括小臂转轴5
‑
1、主动臂5
‑
2和连接杆5
‑
3,小臂转轴5
‑
1转动安装在连接耳4
‑
3上,主动臂5
‑
2的一端与小臂转轴5
‑
1连接,主动臂5
‑
2的另一端与连接杆5
‑
3的一端连接,连接杆5
‑
3的另一端与末端执行机构6连接。如此设置,在实现转动的同时,还能够对末端执行机构6提供支撑。其它组成和连接关系与具体实施方式一、二、三、四、五或六相同。
23.具体实施方式八:结合图1和图2说明本实施方式,本实施方式主动臂5
‑
2的另一端与连接杆5
‑
3的一端转动连接。其它组成和连接关系与具体实施方式一、二、三、四、五、六或七相同。
24.具体实施方式九:结合图1和图2说明本实施方式,本实施方式的工作床1为“凸”字形床。如此设置,便于与人体外部轮廓形状相匹配。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七或八相同。
25.具体实施方式十:结合图1和图2说明本实施方式,本实施方式的侧轨1
‑
1的长度占工作床1侧边长度的四分之三至三分之一。如此设置,可以保证机器人工作空间覆盖整个脊柱,满足工作要求,其它组成和连接关系与具体实施方式一、二、三、四、五、六、七、八或九相同。
26.本实施方式沿床导轨实现对机器人工作空间、体积、准确度和标定的优化
27.结合图1和图2说明本发明的工作原理:
28.水平移动臂2一端的基座与工作床上的侧轨1
‑
1连接,完成水平方向的移动,同时,竖直移动臂3安装在水平移动臂2上,可以沿着水平移动臂2上竖直方向的导轨完成竖直方向运动。竖直移动臂3与大臂4和小臂5通过转动副串联连接,完成水平面内的摆动。
29.在机器人执行手术操作时,操作人员可以手持机械臂末端引导机械臂执行元件移动,同时在机器人的路径规划与安全操作区域的限制下达到指定工作地点完成操作。用户施加在手术工具上的力引导机械臂随用户运动,机械臂的刚度可以提高稳定性和精度,这种操作模式结合了机器人的精确度以及操作人员的即时性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1