骨科椎弓根螺钉置入辅助设备的制作方法
1.本发明涉及骨科手术辅助器械领域,特别是一种骨科椎弓根螺钉置入辅助设备。
背景技术:
2.骨科椎弓根手术过程中,通常需要配备透视设备辅助确定椎弓根钻孔位置。目前常见的透视设备有“c”形臂x光机,及“g”形臂x光机。“c”形臂x光机可旋转,但是不能同时透视正位和侧位;“g”形臂可以同时透视正位和侧位,但位置固定不能旋转。这样给手术操作带来不便,并且极易误伤椎管内的硬膜囊、神经根,造成瘫痪、脑脊液外漏等严重并发症,给患者带来痛苦,使得医患关系紧张。
3.专利文献cn106175917a,公开了一种滑动交叉透视骨科椎弓根螺钉置入辅助设备,该设备导向杆、滑动筒、套筒、椎弓根钻孔器轴线相同,并且其轴线与限束器、射线源、接收装置的中心轴线重合。b弧用于指引进钉方向,a弧防止进钉过深。并且第一套筒能够左右移动,第二驱动电机能够驱动齿轮齿条带动b弧沿着a弧按照顺时针和逆时针两个方向转动。第三套筒上下移动,旋转电机驱动啮合齿轮转动,从而带动前后轮传动轴以及左右轮传动轴转动。控制器上设置多种按钮,便于控制该设备在不同方向上移动,并且与显示屏配合使用,方便椎弓根钉的准确植入,以及对整台设备的操纵。该设备采用一根立柱支撑设备上下移动,一根支撑臂控制a弧、b弧左右移动,向前向后旋转,传动不稳定,仍然容易出现偏差,造成定位不准确。并且a弧、b弧的转动,不能完整旋转一个圆周,造成后期图像处理不便。
4.专利文献cn104434156a,公开了一种用于双平面x射线成像设备的双c臂结构及成像设备,通过设置第一c臂和第二c臂,并且第一c臂通过第一支撑及限位装置可滑动地安装在滑动及旋转座上,第二c臂通过第二支撑及限位装置可滑动地安装在滑动及旋转座上,第一c臂和第二c臂可以相互独立的滑动,在工作时二者不会相互影响,并且相对于现有的双c臂结构,本发明结构简单、使用方便。在手术操作时,可以分别独立的调整第一c臂和第二c臂,相对于现有技术,能够减少手术风险和手术时间。该设备只是方便独立调整第一c臂和第二c臂,未设置其他辅助设备,不能实现该设备在其他方向的移动。
技术实现要素:
5.本发明的目的在于克服以上技术缺陷,提出一种运行平稳,定位精度高,并且能够实现多个方向调整定位的骨科椎弓根螺钉置入辅助设备。
6.本发明为实现其技术目的所采取的的技术方案是:骨科椎弓根螺钉置入辅助设备,包括轴承、滑环,所述轴承包括一组能够相对滑动的外圈和内圈,所述滑环与所述轴承内圈固定,所述滑环与所述轴承外圈之间还设有电刷,所述内圈上设有x射线光源和x射线接收器,并且所述接收器设置在所述光源正对面;所述外圈的外表面设置驱动机构,用于驱动内圈旋转,在外圈的直径方向左右两端设置支撑装置;
所述支撑装置上部设置摆动机构,下部设置工作台,所述摆动机构与所述外圈连接,在所述工作台上还设有滑台、升降装置、旋转装置;所述滑台能够前后、左右移动,所述升降装置能够上下移动,所述旋转装置能够旋转,所述轴承能够轴向转动,并且能够在摆动机构作用下前后摆动。
7.优选的,所述x射线光源包括限束器,在所述限束器内设有球管、x射线挡块;所述x射线挡块位于所述球管的内侧或外侧,并且所述x射线挡块中心设置通孔,所述通孔用于透过所述球管发射的x射线束;所述x射线挡块中心的通孔截面形状为为矩形、等腰梯形或沙漏形;所述x射线接收器用于接收x射线,并向外传输x射线信号。
8.优选的,所述光源与接收器采用导引装置与所述轴承内圈连接,所述导引装置包括箍紧装置,第一横向连接杆,纵向连接杆,第二横向连接杆,套筒;箍紧装置为圆形,并且与x射线同轴;所述第一横向连接杆一端与箍紧装置通过卡盘连接,另一端与所述纵向连接杆上端连接,所述第二横向连杆一端与所述套筒连接,另一端与所述纵向连接杆下端连接;所述卡盘能够沿着箍紧装置圆周滑动,并且所述第一横向连接杆的延长线通过箍紧装置的圆心;所述纵向连接杆为丝杠,并且能够在电机驱动下轴向滑动;所述箍紧装置、套筒与x射线轴同轴,所述第一横向连接杆、纵向连接杆、第二横向连接杆的轴线位于同一平面内。
9.优选的,所述轴承内圈截面为“凸”字形内圈,其两侧肩部设置两个外圈,所述滑环与所述轴承内圈通过螺栓固定,所述轴承外圈外表面的驱动机构,包括驱动电机和同步带,所述驱动电机通过电机连板连接在所述外圈上,所述驱动电机上设有主动齿轮,所述内圈外表面上设有从动齿轮,所述同步带连接在所述主动齿轮与从动齿轮之间。
10.优选的,所述滑环与所述轴承内圈通过螺栓固定,所述轴承外圈外表面的驱动机构,包括驱动电机,所述驱动电机上设有主动齿轮,所述内圈外表面上设有从动齿轮,所述主动齿轮与从动齿轮相互啮合,从而带动所述从动齿轮转动。
11.优选的,所述摆动机构包括摆动电机、摆动减速器、摆动轴、皮带,所述摆动电机输出轴与所述摆动减速器输入轴通过齿轮传动连接,所述摆动减速器输出轴上设有主动皮带轮;所述摆动轴通过轴承水平设置在所述支撑装置上端,所述摆动轴外端设置从动皮带轮,内端通过连接块连接在所述外圈上;所述皮带连接在所述主动皮带轮与所述从动皮带轮之间。
12.优选的,所述摆动机构包括摆动电机、摆动减速器、摆动轴、主动摆动齿轮、从动摆动齿轮,所述摆动电机输出轴与所述摆动减速器输入轴通过齿轮传动连接,所述摆动减速器输出轴上设有主动摆动齿轮;所述摆动轴通过轴承水平设置在所述支撑装置上端,所述摆动轴外端设置从动摆动齿轮,内端通过连接块连接在所述外圈上;所述主动摆动齿轮与从动摆动齿轮相互啮合,从而带动所述从动摆动齿轮转动。
13.优选的,所述旋转装置包括托盘,在所述托盘中心设置托盘通孔,托盘下方设置旋转电机、旋转减速器,上方设置转盘,所述旋转减速器与所述旋转电机配合连接,并且所述旋转减速器的输出轴穿过所述托盘通孔,连接在所述转盘上,使得所述旋转电机能够驱动所述转盘转动;
所述支撑装置为u字形结构,所述转盘上部连接在所述u字形结构的水平横板下部;在所述水平横板的左右两侧,还设有滑块,在所述托盘上表面还设有圆弧形滑轨,所述滑块扣设在所述圆弧形滑轨上方,随着转盘转动,带动水平横板转动,从而带动滑块沿着圆弧形滑轨滑动。
14.优选的,所述升降装置包括升降丝杠、升降电机,升降丝杠上端连接在托盘下表面,下端配合在升降电机上,所述升降电机设置在所述滑台内;所述升降电机转动,能够带动所述升降丝杠升降,进而推动所述托盘升降。
15.优选的,所述滑台包括外侧滑台、中间滑台、内侧滑台,所述中间滑台套接在所述外侧滑台内,并且能够沿着所述外侧滑台左右平移;所述内侧滑台套接在所述中间滑台内,并且能够沿着所述中间滑台前后平移;所述升降装置的升降丝杠、升降电机设置在所述内侧滑台内;所述外侧滑台上设有第一滑轨、第一丝杠、第一丝杠电机和第一托架,所述第一丝杠电机设置在所述第一托架上,所述第一丝杠一端通过减速器连接在所述第一丝杠电机输出轴上,另一端穿过所述第一托架并延伸到所述中间滑台上;所述中间滑台外侧设有与所述第一滑轨相配合的第一滑块,内侧设有第二滑轨、第二丝杠、第二丝杠电机和第二托架,所述第二丝杠电机设置在所述第二托架上,所述第二丝杠一端通过减速器连接在所述第二丝杠电机输出轴上,另一端穿过所述第二托架并延伸到所述内侧滑台上;所述内侧滑台外侧设有与所述第二滑轨相配合的第二滑块,内侧设有垂直圆孔作为升降滑道,所述升降丝杠套设在升降滑道内。
16.本发明的有益效果是:滑台中的内侧滑台实现对工作台前后方向的调整,中间滑台实现对工作台左右方向的调整,升降装置实现对工作台上下方向的调整。旋转装置实现支撑装置绕其垂直中心线旋转,进而带动轴承滑环组合体绕其垂直中心线转动。摆动电机转动,进而带动轴承滑环组合体绕其水平中心线转动,实现轴承滑环组合体在前后方向摆动。轴承外圈与内圈能够相对移动,配合x射线光源、接收器,依据x射线光源发射的射线,在透视下找到需要置入椎弓根钉的位置。导引装置的导向杆、滑动筒、套筒与椎弓根钻孔器轴线相同,并且其轴线与x射线挡块、球管、影像增强器的中心轴线重合,确保椎弓根钻孔器进行钻孔工作时,引导线精确对准钻孔位置,避免发生偏斜。x射线挡块的通孔截面形状为为矩形、等腰梯形或沙漏形,阻挡住阳极散射出来的射线,留下通孔处通过的精准射线,辅助椎弓根钻孔定位。
附图说明
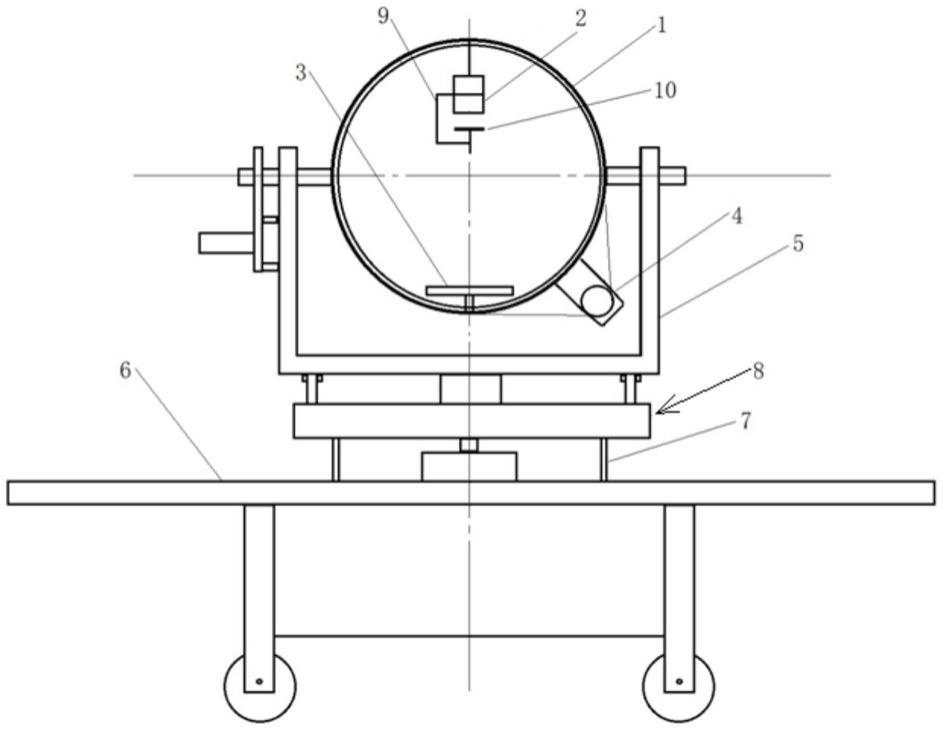
17.图1为本发明整体结构示意图;图2为升降装置、旋转装置结构示意图;图3为滑环与轴承、从动齿轮连接方式示意图;图4为滑环与轴承、从动齿轮另一种连接方式示意图;图5为导引装置与x射线光源连接方式示意图;图6为导引装置与x射线接收器连接方式示意图;图7为x射线接收器与箍筋装置连接示意图;
图8为x射线接受器上连接箍筋装置时工作状态示意图;图9为球管与x射线挡块位置关系示意图;图10球管与x射线挡块另一种位置关系示意图;图11为x射线挡块通孔矩形截面示意图;图12为x射线挡块通孔等腰梯形截面示意图;图13为x射线挡块通孔沙漏形截面示意图;图14为光源与接收器工作原理示意图;图15为轴承滑环组合体与摆动机构结构示意图;图16为轴承滑环组合体与摆动机构另一种结构示意图;图17滑台整体示意图;图18为滑台剖切示意图;图19为第一滑轨与第一滑块连接方式示意图;图20为第二滑轨与第二滑块连接方式示意图;图21为托盘以及升降丝杠结构示意图。
18.图中标记为: 1、轴承;100、滑环;11、外圈;12、内圈;13、电刷;14、螺栓;2、x射线光源;3、x射线接收器;4、驱动机构;5、支撑装置;6、滑台;7、升降装置;8、旋转装置;9、导引装置;10、椎弓根钻孔器;21、限束器;211、球管;212、x射线挡块;213、通孔;41、驱动电机;42、同步带;43、电机连板;44、主动齿轮;45、从动齿轮;52、摆动机构;53、工作台;521、摆动电机;522、摆动减速器;523、摆动轴;524、皮带;525、主动皮带轮;526、轴承;527、从动皮带轮;528、连接块;529、主动摆动齿轮;530、从动摆动齿轮;61、外侧滑台;62、中间滑台;63、内侧滑台;64、第一滑轨;65、第一丝杠;66、第一丝杠电机;67、第一托架;68、第一滑块;69、第二滑轨;610、第二丝杠;611、第二丝杠电机;612、第二托架;613、第二滑块;614、垂直圆孔;71、升降丝杠;72、升降电机;81、托盘;82、托盘通孔;83、旋转电机;84、旋转减速器;85、转盘;86、旋转滑块;87、圆弧形滑轨;91、箍紧装置;92、第一横向连接杆;93、纵向连接杆;94、第二横向连接杆;95、套筒;96、卡盘;97、安装支架。
具体实施方式
19.下面结合附图实施例,对本发明做进一步说明。
20.实施例一如图1
‑
2,图4
‑
5,图9
‑
15,图17
‑
21 所示:骨科椎弓根螺钉置入辅助设备,包括轴承1、滑环100,所述轴承1包括一组能够相对滑动的外圈11和内圈12,所述滑环100与所述轴承1内圈12固定,所述滑环100与所述轴承外圈11之间还设有电刷13,所述内圈12上设有x射线光源2和x射线接收器3,并且所述x射线接收器3设置在所述x射线光源2正对面;所述外圈11外表面设置驱动机构4,用于驱动内圈12旋转,在外圈11的直径方向左右两端设置支撑装置5;所述支撑装置5上部设置摆动机构52,下部设置工作台53,所述摆动机构52与所述外圈11连接,在所述工作台53上还设有滑台6、升降装置7、旋转装置8;所述滑台6能够前后、
左右移动,所述升降装置7能够上下移动,所述旋转装置8能够旋转,所述轴承1能够轴向转动,并且能够在摆动机构52作用下前后摆动。
21.所述x射线光源2包括限束器21,在所述限束器21内设有球管211、x射线挡块212;所述x射线挡块212位于所述球管211的内侧或外侧,并且所述x射线挡块212中心设置通孔213,所述通孔213用于透过所述球管211发射的x射线束;所述x射线挡块212中心的通孔截面形状为为矩形、等腰梯形或沙漏形;所述x射线接收器3用于接收x射线,并向外传输x射线信号。
22.所述x射线光源2与x射线接收器3采用导引装置9与所述轴承内圈12连接,所述导引装置包括箍紧装置91,第一横向连接杆92,纵向连接杆93,第二横向连接杆94,套筒95;箍紧装置91为圆形,并且与x射线同轴;所述第一横向连接杆92一端与箍紧装置91通过卡盘96连接,另一端与所述纵向连接杆93上端连接,所述第二横向连杆94一端与所述套筒95连接,另一端与所述纵向连接杆93下端连接;所述卡盘96能够沿着箍紧装置91圆周滑动,并且所述第一横向连接杆92的延长线通过箍紧装置91的圆心;所述纵向连接杆93为丝杠,并且能够在电机驱动下轴向滑动;所述箍紧装置91、套筒95与x射线轴同轴,所述第一横向连接杆92、纵向连接杆93、第二横向连接杆94的轴线位于同一平面内;箍紧装置可设置于限束器或接收器外缘,即单独设置在限束器或接收器外缘,或限束器或接收器外缘均设置箍紧装置。
23.所述轴承内圈12截面为“凸”字形内圈,其两侧肩部设置两个外圈11,所述滑环100与所述轴承内圈12通过螺栓14固定,所述轴承1外圈11外表面的驱动机构4,包括驱动电机41和同步带42,所述驱动电机41通过电机连板43连接在所述外圈11上,所述驱动电机41上设有主动齿轮44,所述内圈12上设有从动齿轮45,所述同步带42连接在所述主动齿轮44与从动齿轮45之间。
24.所述摆动机构52包括摆动电机521、摆动减速器522、摆动轴523、皮带524,所述摆动电机521输出轴与所述摆动减速器522输入轴通过齿轮传动连接,所述摆动减速器522输出轴上设有主动皮带轮525;所述摆动轴523通过轴承526水平设置在支撑装置5上端,所述摆动轴523外端设置从动皮带轮527,内端通过连接块528连接在所述外圈12上;所述皮带524连接在所述主动皮带轮525与所述从动皮带轮527之间。
25.所述旋转装置8包括托盘81,在所述托盘81中心设置托盘通孔82,托盘81下方设置旋转电机83、旋转减速器84,上方设置转盘85,所述旋转减速器84与所述旋转电机83配合连接,并且所述旋转减速器84的输出轴穿过所述托盘通孔82,连接在所述转盘85上,使得所述旋转电机83能够驱动所述转盘85转动;所述支撑装置5为u字形结构,所述转盘85上部连接在所述u字形结构的水平横板下部;在所述水平横板的左右两侧,还设有旋转滑块86,在所述托盘81上表面还设有圆弧形滑轨87,所述旋转滑块86扣设在所述圆弧形滑轨87上方,随着转盘85转动,带动水平横板转动,从而带动旋转滑块86沿着圆弧形滑轨87滑动。
26.所述升降装置7包括升降丝杠71、升降电机72,升降丝杠71上端连接在托盘81下表面,下端配合在升降电机72上,所述升降电机72设置在所述滑台6内;所述升降电机72转动,能够带动所述升降丝杠71升降,进而推动所述托盘81升降。
27.所述滑台6包括外侧滑台61、中间滑台62、内侧滑台63,所述中间滑台62套接在所述外侧滑台61内,并且能够沿着所述外侧滑台61左右平移;所述内侧滑台63套接在所述中间滑台62内,并且能够沿着所述中间滑台62前后平移;所述升降装置7的升降丝杠71、升降电机72设置在所述内侧滑台63内;所述外侧滑台61上设有第一滑轨64、第一丝杠65、第一丝杠电机66和第一托架67,所述第一丝杠电机66设置在所述第一托架67上,所述第一丝杠65一端通过减速器连接在所述第一丝杠电机66输出轴上,另一端穿过所述第一托架67并延伸到中间滑台62上;所述中间滑台62外侧设有与所述第一滑轨64相配合的第一滑块68,内侧设有第二滑轨69、第二丝杠610、第二丝杠电机611和第二托架612,所述第二丝杠电机611设置在所述第二托架612上,所述第二丝杠610一端通过减速器连接在所述第二丝杠电机611输出轴上,另一端穿过所述第二托架612并延伸到所述内侧滑台63上;所述内侧滑台63外侧设有与所述第二滑轨69相配合的第二滑块613,内侧设有垂直圆孔614作为升降滑道,所述升降丝杠71套设在升降滑道内。
28.本发明的工作原理及工作过程如下:本发明包括三个直线运动与三个旋转运动组成的六轴系统。该六轴系统与x射线组成整体系统,用于寻找该区域空间内目标物即椎弓根的轴线。寻找到该轴线后与导向套筒系统配合,将导针置入目标物即椎弓根内。
29.运动与定位关系:(1)左右移动,看脊柱后前位长轴。
30.(2)前后移动,看目标椎体正位上下缘。
31.(3)基底旋转,看椎体侧位上下缘平齐。
32.(4)升降调节,估计两侧椎弓根交点。
33.(5)摆动旋转,看后前位椎体椎弓根上下缘。
34.(6)旋转轴承内圈,看椎弓根轴线。
35.具体来讲:首先,为方便推动工作台53,在外侧滑台63底部四角设置轮子,通过轮子将工作台53推动到手术室。
36.轴承1包括外圈11和内圈12,内圈12上设置x射线光源2和x射线接收器3,沿着手术床推动工作台53,使得内圈12沿着手术床移动,直到工作台53移动到病人脊椎需要植入椎弓根钉的部位。
37.待轴承1与滑环100整体1移动到合适位置后,第二丝杠电机611驱动第二丝杠610转动,进而带动内侧滑台63上的第二滑块613沿着第二滑轨69移动,进而带动述升降丝杠71、升降电机72前后移动,实现对工作台53前后方向的调整,如图18,图19,图20所示。
38.第一丝杠电机66驱动第一丝杠65转动,进而带动中间滑台62上的第一滑块68沿着第一滑轨64移动,进而带动述内侧滑台63以及升降丝杠71、升降电机72左右移动,实现对工作台53左右方向的调整,如图18,图19,图20所示。
39.启动升降电机72,带动升降丝杠71转动,进而推动托盘81升降,实现对工作台53上下方向的调整,如图17所示。
40.完成工作台前后、左右、上下方向的调整之后,再对本发明所述设备进行旋转调整。即:旋转电机83驱动转盘85转动,随着转盘85转动,带动u字形支撑装置5的水平横板转动,从而带动旋转滑块86在圆弧形滑轨87上转动,实现支撑装置5绕其垂直中心线旋转,进
而带动轴承1与滑环100整体绕其垂直中心线转动。
41.摆动电机521转动,带动主动皮带轮525、皮带524以及从动皮带轮527转动,进而带动轴承1与滑环100绕其水平中心线转动,实现轴承1与滑环100在前后方向摆动。
42.外圈11外表面的驱动机构4,驱动电机41上设有主动齿轮44,内圈12上设有从动齿轮45,同步带42连接在主动齿轮44与从动齿轮45之间。驱动电机41驱动内圈12相对外圈11转动,随着内圈12的转动,依据x射线光源2发射的射线,在透视下找到需要置入椎弓根钉的位置。
43.x射线光源2包括影像增强器21,在影像增强器21内设有球管211、x射线挡块212; x射线挡块212中心设置通孔213,通孔213用于透过x射线束。并且x射线挡块212中心的通孔213截面形状为矩形、等腰梯形或沙漏形,这样以来,球管211发射的x射线,能够形成精准的投射,辅助椎弓根钻孔定位。
44.x射线接收器3配备无线图传系统,该系统将x射线接收器3 传输来的信号以无线方式发送至无线信号接收器并传输至电脑,实现在显示器中读取椎弓根钻孔定位画面和实时钻孔工作画面,提高椎弓根钻孔精度,以及椎弓根钉植入精度。
45.实施例二如图3、图16所示:所述轴承1外圈11外表面的驱动机构4,包括驱动电机41,所述驱动电机41上设有主动齿轮44,所述内圈12上设有从动齿轮45,所述主动齿轮44与从动齿轮45相互啮合,从而带动所述从动齿轮45转动。
46.所述摆动机构包括摆动电机521、摆动减速器522、摆动轴523、主动摆动齿轮529、从动摆动齿轮530,所述摆动电机521输出轴与所述摆动减速器522输入轴通过齿轮传动连接,所述摆动减速器522输出轴上设有主动摆动齿轮529;所述摆动轴523通过轴承526水平设置在所述支撑装置5上端,所述摆动轴523外端设置从动摆动齿轮530,内端通过连接块528连接在所述外圈11上;所述主动摆动齿轮529与从动摆动齿轮530相互啮合,从而带动所述从动摆动齿轮530转动。
47.如图6
‑
图8所示:x射线接收器3上设有导引装置9引导置钉,导引装置9包括箍紧装置91,第一横向连接杆92,纵向连接杆93,第二横向连接杆94,套筒95;箍紧装置91为圆形,并且与x射线同轴;所述第一横向连接杆92一端与箍紧装置91通过卡盘96连接,另一端与所述纵向连接杆93上端连接,所述第二横向连杆94一端与所述套筒95连接,另一端与所述纵向连接杆93下端连接;所述卡盘96能够沿着箍紧装置91圆周滑动,并且所述第一横向连接杆92的延长线通过箍紧装置91的圆心;所述纵向连接杆93为丝杠,并且能够在电机驱动下轴向滑动;所述箍紧装置91、套筒95与x射线轴同轴,所述第一横向连接杆92、纵向连接杆93、第二横向连接杆94的轴线位于同一平面内。
48.箍紧装置91可设置于x射线光源2或x射线接收器3外缘,即单独设置在x射线光源2的限束器21外缘,或x射线接收器3的安装支架97外缘。
49.使用时将纵向连接杆93延长,套筒95内放入椎弓根钻孔器10,进行椎弓根钻孔。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1