手术导航系统的配准方法、装置和手术导航系统与流程
本技术涉及医学影像处理,特别是涉及一种手术导航系统的配准方法、装置、手术导航系统和存储介质。
背景技术:
1、近年来,随着医学影像处理技术的不断提高,手术导航技术得以广泛应用。手术导航技术是指利用患者的医学影像信息为手术过程提供图像引导的技术,通过这项技术,医生可以在手术过程中了解到患者身体内部结构和生理信息,从而可以准确地判断患者当前的治疗状态。
2、手术导航技术的实现依赖于导航空间和影像空间中相对应点的空间配准。当前的手术导航的空间配准技术通常采用术中扫描的患者的三维医学影像信息进行配准导航,一般是先将带有特殊金属标记点的装置与患者一起进行医学扫描成像,再通过手动选取或计算机自动识别的方式在医学影像中选取标记点,获得这些标记点在医学影像空间中的坐标,然后使用注册探针获取以上标记点在导航空间中的坐标,最后通过以上两组标记点的坐标数据计算出医学影像空间和导航空间的转换关系,从而实现手术导航的空间配准。在以上过程中,术中扫描患者的三维医学影像信息需要的扫描时间长,辐射量大,不仅会导致手术导航配准所需时间长,还会对医生和患者造成严重的辐射伤害。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种手术导航系统的配准方法、装置、手术导航系统和存储介质,能够简化配准流程,从而提高手术导航系统的配准效率。
2、本发明第一方面提供一种手术导航系统的配准方法,该方法包括:
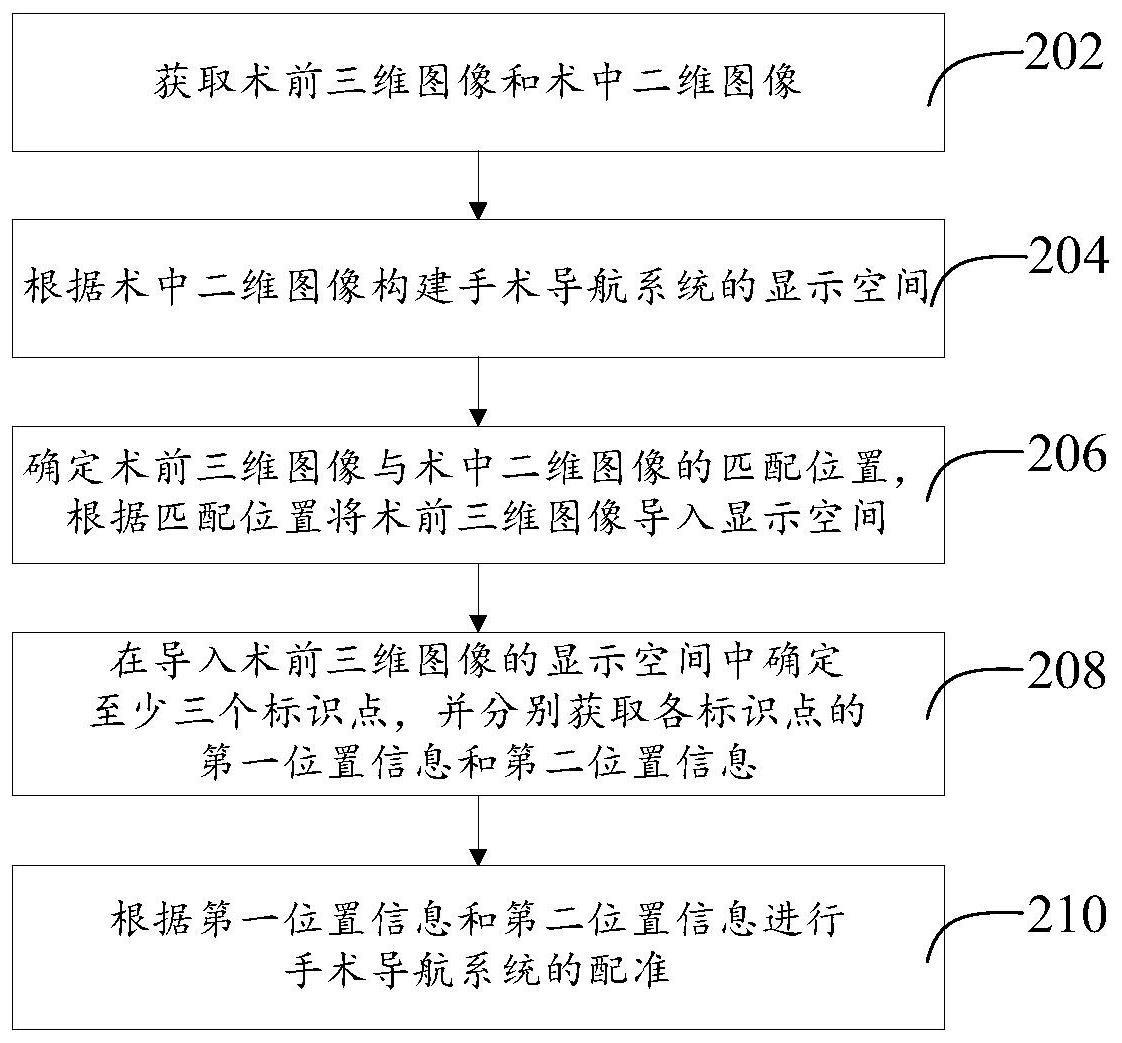
3、获取术前三维图像和术中二维图像,术前三维图像为在手术区域未植入追踪器时对手术区域进行扫描得到的三维图像,术中二维图像包括在手术区域植入追踪器后从不同拍摄角度对手术区域进行拍摄得到的至少两张二维图像;
4、根据术中二维图像构建手术导航系统的显示空间;
5、确定术前三维图像与术中二维图像的匹配位置,根据匹配位置将术前三维图像导入显示空间;
6、在导入术前三维图像的显示空间中确定至少三个标识点,并分别获取各标识点的第一位置信息和第二位置信息,第一位置信息为标识点在显示空间中的位置信息,第二位置信息为标识点在物理空间中的位置信息;
7、根据第一位置信息和第二位置信息进行手术导航系统的配准。
8、在其中一个实施例中,各张二维图像对应的拍摄角度成预设夹角,追踪器上设有标记球;根据术中二维图像构建手术导航系统的显示空间,包括:
9、设置初始位置,按预设夹角将各张二维图像进行位置对齐;
10、获取标记球的第一尺寸信息和第二尺寸信息,根据第一尺寸信息和第二尺寸信息得到每张二维图像分别对应的缩放比例,根据缩放比例将每张二维图像的尺寸调整至与该二维图像所显示区域在物理空间中的实际尺寸一致;第一尺寸信息包括标记球在各张二维图像中的显示尺寸数据,第二尺寸信息为标记球的物理尺寸数据,缩放比例为每张二维图像的尺寸与该二维图像所显示区域在物理空间中的实际尺寸之间的比例;
11、在追踪器上选取标识点,根据该标识点在调整尺寸后的各张二维图像中的位置,对各张二维图像进行手术区域对齐,得到手术导航系统的显示空间。
12、在其中一个实施例中,确定术前三维图像与术中二维图像的匹配位置,包括:
13、获取术前三维图像处于不同位置时向成预设夹角的至少两个投影平面进行投影所产生的投影图像,计算不同位置所对应的投影图像与各张二维图像之间的相似度,并选取相似度最大的投影图像对应的位置作为术前三维图像与术中二维图像的匹配位置;
14、或者,在术前三维图像和术中二维图像中选取特征点,通过特征点匹配计算得到术前三维图像与术中二维图像的匹配位置。
15、在其中一个实施例中,在导入术前三维图像的显示空间中确定至少三个标识点,并分别获取各标识点的第一位置信息和第二位置信息,包括:
16、在追踪器上选取至少三个标识点,获取每个标识点在调整尺寸后的各张二维图像中的二维坐标数据,根据二维坐标数据确定每个标识点在显示空间中的三维坐标数据;
17、获取追踪器上的各标识点在物理空间中的三维坐标数据;
18、根据第一位置信息和第二位置信息进行手术导航系统的配准,包括:
19、根据追踪器上的各标识点在显示空间中的三维坐标数据以及各标识点在物理空间中的三维坐标数据,得到显示空间与物理空间之间的空间转换关系。
20、在其中一个实施例中,该方法还包括:
21、获取在物理空间中手术工具与追踪器之间的位置转换关系,根据位置转换关系和追踪器在显示空间中的位置信息,确定手术工具在显示空间中的位置信息;或者,获取手术工具在物理空间中的位置信息,根据手术工具在物理空间中的位置信息以及显示空间与物理空间之间的空间转换关系,确定手术工具在显示空间中的位置信息。
22、在其中一个实施例中,该方法还包括:
23、当追踪器在物理空间中的位置发生变化时,计算得到该追踪器的位置变化关系;
24、根据位置变化关系和追踪器在显示空间中的初始位置信息,得到追踪器在显示空间中的新位置信息;
25、根据追踪器在显示空间中的新位置信息以及在物理空间中手术工具与追踪器之间的位置转换关系,确定手术工具在显示空间中的新位置信息;和/或,根据追踪器在显示空间中的新位置信息以及在显示空间中病灶部位与追踪器之间的预设位置转换关系,确定病灶部位在显示空间中的新位置信息。
26、在其中一个实施例中,术中二维图像包括在手术区域植入追踪器后对手术区域进行拍摄得到的术中正位图像和术中侧位图像。
27、在其中一个实施例中,在追踪器为设有两个标记球的追踪钉时,至少三个标识点包括追踪钉的尖端和两个标记球的球心。
28、本发明第二方面提供一种手术导航系统的配准装置,该装置包括:
29、图像获取模块,用于获取术前三维图像和术中二维图像,术前三维图像为在手术区域未植入追踪器时对手术区域进行扫描得到的三维图像,术中二维图像包括在手术区域植入追踪器后从不同拍摄角度对手术区域进行拍摄得到的至少两张二维图像;
30、显示空间构建模块,用于根据术中二维图像构建手术导航系统的显示空间;
31、术前图像导入模块,用于确定术前三维图像与术中二维图像的匹配位置,根据匹配位置将术前三维图像导入显示空间;
32、位置获取模块,用于在导入术前三维图像的显示空间中确定至少三个标识点,并分别获取各标识点的第一位置信息和第二位置信息,第一位置信息为标识点在显示空间中的位置信息,第二位置信息为标识点在物理空间中的位置信息;
33、空间配准模块,用于根据第一位置信息和第二位置信息进行手术导航系统的配准。
34、本发明第三方面提供一种手术导航系统,系统包括第一医学影像扫描装置、第二医学影像扫描装置、追踪装置和计算机设备;
35、第一医学影像扫描装置用于采集术前三维图像,术前三维图像为在手术区域未植入追踪器时对手术区域进行扫描得到的三维图像;
36、第二医学影像扫描装置用于采集术中二维图像,术中二维图像包括在手术区域植入追踪器后从不同拍摄角度对手术区域进行拍摄得到的至少两张二维图像;
37、追踪装置包括用于植入手术区域中的追踪器,追踪装置用于确定追踪器在物理空间中的位置信息;
38、计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时完成上述任一实施例中的手术导航系统的配准方法。
39、在其中一个实施例中,追踪器包括钉体和标记球,钉体的尖端固定植入手术区域,钉体内部设有定位器;
40、具体地,定位器为光学定位传感器或者电磁定位传感器;
41、具体地,追踪器包括两个标记球,所述两个标记球的球心与所述钉体的尖端为不共线的三个点。
42、本发明第四方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法的实施例的步骤。
43、在上述实施例中提供了一种手术导航系统的配准方法、装置、手术导航系统和存储介质,其可以通过术前三维图像、术中二维图像以及多个标识点的位置信息实现手术导航系统的配准。其中,在手术过程中,除追踪器外不需要额外设置外部标记物,且只需获取手术区域的术中二维图像,也不需要进行非必要的三维扫描,缩短了配准所需时间,简化了配准流程,从而提高了手术导航系统的配准效率;而且由于减少了中间参照物(比如标尺、注册探针等),也就减少了需要测量的参数和变换参数,因此也降低了测量或计算时发生误差的概率,使得配准的精度更高。
- 还没有人留言评论。精彩留言会获得点赞!