包括光学传感器和非光学传感器的导航系统的制作方法
包括光学传感器和非光学传感器的导航系统
1.本技术是申请日为2013年9月25日,申请号为201811105300.0,发明名称为“包括光学传感器和非光学传感器的导航系统”的申请的分案申请,申请201811105300.0是申请日为2013年9月25日、申请号为201380050199.2,发明名称为“包括光学传感器和非光学传感器的导航系统”的发明专利申请的分案申请。
2.相关申请
3.本技术要求2012年9月26日提交的美国临时专利申请no.61/705,804和2013年9月24日提交的美国非临时申请no.14/035207的优先权和权益,所述专利申请的全部内容通过引用合并于此。
技术领域
4.本发明通常涉及导航系统,所述导航系统通过确定对象的位置和/或方向随时间的变化来在空间中跟踪这样的对象。更具体地说,本发明涉及利用光学传感器和非光学传感器确定对象的位置和/或方向的导航系统。
背景技术:
5.导航系统辅助用户精确地定位对象。例如,导航系统用于工业、航空航天、防卫和医疗应用。在医疗领域中,导航系统辅助外科医生相对于患者的解剖结构精确地放置外科器械。
6.使用导航系统的外科手术包括神经外科手术和整形外科手术。通常,跟踪器械和解剖结构,连同一起在显示器上显示它们的相对运动。导航系统可以结合解剖结构的手术前图像或者手术中图像显示器械移动。通常手术前图像由mri或者ct扫描准备,而手术中图像可以使用荧光镜、低水平x射线或者任何类似装置准备。可选地,一些系统是无图像的,其中患者的解剖结构由导航探头“描绘”并且在数学上拟合到解剖模型用于显示。
7.导航系统可以采用光信号、声波、磁场、rf信号等等以跟踪器械和解剖结构的位置和/或方向。由于光学导航系统的精度,光学导航系统被广泛使用。
8.现有技术光学导航系统通常包括容纳一个或者多个光学传感器(诸如电荷耦合装置或者ccd)的一个或者多个摄像机单元。光学传感器检测从跟踪器发射的光,该跟踪器附接至器械和解剖结构。每个跟踪器具有多个光学发射器(诸如发光二极管(led)),该光学发射器周期性地向传感器发送光以确定led的位置。
9.器械跟踪器上的led的位置与器械的工作端相对于摄像机坐标系的坐标相关。一个或者多个解剖结构跟踪器上的led的位置与三维空间中的解剖结构的目标区域相对于摄像机坐标系的坐标相关。因此,可以跟踪和显示器械的工作端相对于解剖结构的目标区域的位置和/或方向。
10.可以以闭合环路方式使用导航系统以控制外科器械的运动。在这些导航系统中,器械和正治疗的解剖结构两者都配备有跟踪器以使得导航系统可以跟踪它们的位置和方向。然后,来自导航系统的信息被馈送至控制系统以控制或者引导器械的运动。在某些情况
下,器械由机器人掌握并且将信息从导航系统发送至机器人的控制系统。
11.为了使控制系统快速引起器械与正治疗的解剖结构之间的相对运动,导航系统的精度和速度必须满足程序的期望公差。例如,与无粘固粉膝部移植物相关联的公差可以是非常小以确保植入物的充分适配和功能。因此,导航系统的精度和速度可能需要大于更多粗切割程序中的精度和速度。
12.光学导航系统的精度和速度上的限制中的一个是系统依赖摄像机单元的光学传感器与led之间的视线。当视线断开时,系统可能不精确地确定当前跟踪的器械和解剖结构的位置和/或方向。因此,外科手术可能遭遇许多启动和停止。例如,在对机器人辅助的切割进行控制期间,当视线断开时,必须禁用切割工具直到重新获得视线。这可能给程序带来显著的延迟和附加成本。
13.当在跟踪器上使用有源led时出现精度上的另一个限制。在这种系统中,led通常依次点亮(fired)。在这种情况下,系统仅测量和知道主动点亮的led的位置,而剩余未测量的led的位置是未知的。在这些系统中,剩余未测量的led的位置是近似的。近似通常基于从当前未测量的led的上一个已知的测量位置推断的线速度数据。然而,由于led依次点亮,因此在任何一个led的测量之间可能有相当大的滞后。该滞后随着在系统中使用每个附加跟踪器而增大。此外,该近似不考虑跟踪器的旋转,还导致跟踪器的位置数据的可能错误。
14.因此,在本领域中需要利用附加的基于非光学的数据的光学导航系统以改善跟踪并且提供这样的精度和速度水平,以该精度和速度水平为精确的外科程序(诸如机器人辅助的外科切割)确定对象的位置和/或方向。
技术实现要素:
15.本发明涉及利用光学传感器和非光学传感器确定对象的位置和/或方向的系统和方法。
16.在发明的一个版本中,提供了一种用于跟踪对象的导航系统。导航系统包括从跟踪器上的一个或者多个标志器接收光学信号的光学传感器。跟踪器还包括生成非光学信号的非光学传感器。计算系统基于第一光学信号确定在第一时间处标志器中的一个的位置。计算系统还基于第一光学信号以及来自非光学传感器的非光学信号确定在第一时间处其它标志器中的一个或者多个的位置。然后,使确定的位置与对象相关以跟踪对象的位置。
17.在发明的另一个版本中,提供了用于跟踪对象的导航系统。导航系统包括从跟踪器上的三个标志器顺序地接收光学信号的光学传感器。跟踪器还包括生成非光学信号的非光学传感器。计算系统基于来自第一标志器的第一光学信号,确定在第一时间处标志器中的第一标志器的位置。计算系统还基于第一光学信号以及来自非光学传感器的非光学信号确定在第一时间处标志器中的第二标志器和第三标志器的位置。然后,使确定的位置与对象相关以跟踪对象的位置。
18.在发明的又另一个版本中,提供了机器人外科切割系统。系统包括机器人操纵器和切割工具。机器人控制系统在至少5个自由度上控制或者约束切割工具的运动。导航系统与机器人控制系统进行通信。导航系统包括至少一个光学传感器和安装至机器人操纵器的跟踪器。还提供了用于安装至患者的解剖结构的跟踪器。该解剖结构跟踪器包括非光学传感器和三个标志器。光学传感器从标志器接收光学信号以及非光学传感器生成非光学信
号。导航系统将指示解剖结构位置的位置数据传递至机器人控制系统以控制解剖结构的切割,以使得切割发生在预定义边界内。
19.在发明的另一个版本中,提供了包括具有至少一个光学传感器的定位器的导航系统。跟踪器与光学传感器进行通信。跟踪器包括非光学传感器和三个标志器。计算系统基于光学信号和非光学信号确定三个标志器中的每一个在定位器坐标系中的位置。计算系统执行匹配算法以使标志器中的一个或者多个在定位器坐标系中的确定的位置与所述标志器中的一个或者多个在相对于跟踪器坐标系建立的跟踪器的模型中的位置匹配,以获得将跟踪器坐标系变换为定位器坐标系的变换矩阵。
20.在发明的另一个版本中,提供了用于跟踪对象的系统。系统包括至少两个光学传感器和用于安装至对象的跟踪器。跟踪器具有非光学传感器和三个标志器。至少两个光学传感器按照至少100hz的光学感测频率从标志器接收光学信号。非光学传感器按照至少100hz的非光学感测频率生成非光学信号。
21.还提供了用于跟踪对象的方法。方法包括操作光学传感器以从标志器顺序地接收光学信号以及操作非光学传感器以生成非光学信号。基于来自第一标志器的第一光学信号,确定在第一时间处标志器中的第一标志器的位置。基于第一光学信号以及来自非光学传感器的非光学信号确定在第一时间处标志器中的第二标志器和第三标志器的位置。使第一标志器、第二标志器和第三标志器的确定的位置与对象相关以在外科程序期间跟踪对象的位置。
22.提供了用于在外科程序期间跟踪对象的另一个方法。在该方法中,将三个标志器安置在光学传感器的视场中以使得光学传感器从标志器顺序地接收光学信号。然后,操作计算系统以基于来自第一标志器的第一光学信号确定在第一时间处标志器中的第一标志器的位置以及基于第一光学信号和来自非光学传感器的非光学信号确定在第一时间处标志器中的第二标志器和第三标志器的位置。然后,使位置与对象相关以在外科程序期间跟踪对象的位置。
附图说明
23.当结合附图考虑时,通过参照以下具体实施方式,本发明的优点将被容易地领会,从而变得更好理解,其中:
24.图1是本发明的导航系统与机器人操纵器结合使用时的透视图;
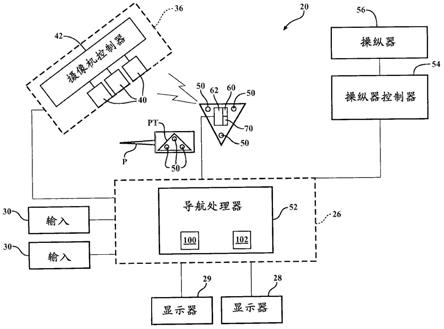
25.图2是导航系统的示意图;
26.图3是由导航系统使用的坐标系的示意图;
27.图4是通过导航系统的定位引擎实施的步骤的流程图;
28.图4a是将测量的led与跟踪器模型匹配以获得变换矩阵的示意说明;
29.图5是在第一可选实施例中由定位引擎实施的步骤的流程图;
30.图5a是包括真实和虚拟led的跟踪器模型的说明;
31.图6是在第二可选实施例中由定位引擎实施的步骤的流程图;以及
32.图7是当一个或者多个led被阻挡测量时由定位引擎实施的步骤的流程图。
具体实施方式
33.i.概述
34.参照图1,图示了外科导航系统20。在外科环境(诸如医疗设施的手术室)中显示了系统20。建立导航系统20以跟踪手术室中的各种对象的运动。这样的对象包括例如,外科器械22、患者的股骨f以及患者的胫骨t。导航系统20跟踪这些对象是为了向外科医生显示它们的相对位置和方向,以及在某些情况下,为了控制或者约束外科器械22相对于预定路径或者解剖边界的运动。
35.外科导航系统20包括容纳导航计算机26的计算机推车组件24。导航接口与导航计算机26操作性通信。导航接口包括适合位于无菌区域外部的显示器28以及适合位于无菌区域内部的显示器29。显示器28、29可调节地安装至计算机推车组件24。输入装置30、32(诸如鼠标和键盘)可以用于将信息输入到导航计算机26中或者以其它方式选择/控制导航计算机26的某些方面。可设想其它输入装置,包括显示器28、29上的触摸屏(未示出)或者语音激活。
36.定位器34与导航计算机26进行通信。在所示实施例中,定位器34是光学定位器并且包括摄像机单元36。摄像机单元36具有容纳一个或者多个光学传感器40的外壳38。在一些实施例中,采用至少两个光学传感器40,优选地采用三个。光学传感器40可以是三个单独的高分辨率电荷耦合装置(ccd)。在一个实施例中,采用三个一维ccd。应当理解,在其它实施例中,还可以围绕手术室布置各自具有单独的ccd或者两个或更多个ccd的单独摄像机单元。ccd检测红外(ir)信号。
37.摄像机单元36安装在可调节臂上以将光学传感器40安置到将进行程序的区域上方,以向摄像机单元36提供下面讨论的跟踪器理想地不受阻挡的视场。
38.摄像机单元36包括与光学传感器40通信的摄像机控制器42用以从光学传感器40接收信号。摄像机控制器42通过有线连接或者无线连接(未示出)与导航计算机26进行通信。一个这种连接可以是ieee 1394接口,该ieee 1394接口是用于高速通信和等时实时数据传送的串行总线接口标准。连接还可以使用公司特定的协议。在其它实施例中,光学传感器40与导航计算机26直接通信。
39.为了跟踪对象,将位置和方向信号和/或数据传输至导航计算机26。计算机推车组件24、显示器28和摄像机单元36可以如2010年5月25日授权的、标题为“surgery system”的malackowski等人的美国专利no.7,725,162中描述的那些一样,该专利通过引用合并于此。
40.导航计算机26可以是个人计算机或者膝上型计算机。导航计算机26具有显示器28、中央处理单元(cpu)和/或其它处理器、存储器(未示出)和存储装置(未示出)。如下所述,导航计算机26装载有软件。软件将从摄像机单元36接收的信号转换成表示正跟踪的对象的位置和方向的数据。
41.导航系统20包括多个跟踪装置44、46、48(此处还称为跟踪器)。在图示的实施例中,一个跟踪器44牢固地固定至患者的股骨f以及另一个跟踪器46牢固地固定至患者的的胫骨t。跟踪器44、46牢固地固定至骨骼的部分。跟踪器44、46可以以美国专利no.7,725,162(其通过引用合并于此)中示出的方式附接至股骨f。在另外的实施例中,附加的跟踪器(未示出)附接至膝盖骨以跟踪膝盖骨的位置和方向。在另外的实施例中,跟踪器44、46可以安装至解剖结构的其它组织类型或者部分。
42.器械跟踪器48牢固地附接至外科器械22。器械跟踪器48可以在制造期间集成到外科器械22中或者可以在外科程序的准备中单独地安装至外科器械22。当前跟踪的外科器械22的工作端可以是旋转钻、电消融装置等等。在所示实施例中,外科器械22是外科操纵器的末端效应器。在标题为“surgical manipulator capable of controlling a surgical instrument in either a semi
‑
autonomous mode or a manual,boundary constrained mode”的美国临时专利申请no.61/679,258(其公开内容通过引用合并于此)以及也在标题为“navigation system for use with a surgical manipulator operable in manual or semi
‑
autonomous mode”的美国专利申请no.13/958,834(其公开内容通过引用合并于此)中示出了这种布置。
43.跟踪器44、46、48可以用内部电池进行电池供电或者可以具有引线以通过导航计算机26接收电力(像摄像机单元36那样优选地接收外部电力)。
44.在其它实施例中,可以仅通过用户的手手动地安置外科器械22,而不需要任何切割引导装置、悬臂或者其它约束机构(诸如操纵器或者机器人)的帮助。在标题为“surgical instrument including housing,a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing”的美国临时专利申请no.61/662,070(其通过引用合并于此)中以及也在标题为“surgical instrument including housing,a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing”的美国专利申请no.13/600,888(其通过引用合并于此)中描述了这种外科器械。
45.定位器34的光学传感器40从跟踪器44、46、48接收光信号。在图示的实施例中,跟踪器44、46、48是有源跟踪器。在该实施例中,每个跟踪器44、46、48具有至少三个有源标志器50用于将光信号发送至光学传感器40。有源标志器50可以是发光二极管或者led50。光学传感器40优选地具有100hz或者更高的采样率,更优选地具有300hz或者更高的采样率,以及最优选地具有500hz或者更高的采样率。在一些实施例中,光学传感器40具有1000hz的采样率。采样率是光学传感器40从顺序点亮的led 50接收光信号的速率。在一些实施例中,对于每个跟踪器44、46、48,按照不同的速率点亮来自led 50的光信号。
46.参照图2,led 50中的每一个连接至位于相关联的跟踪器44、46、48的壳体(未示出)中的跟踪器控制器62,该跟踪器控制器62向/从导航计算机26传输/接收数据。在一个实施例中,跟踪器控制器62通过与导航计算机26的有线连接以几兆字节/秒的数量级传输数据。在其它实施例中,可以使用无线连接。在这些实施例中,导航计算机26具有收发器(未示出)用以从跟踪器控制器62接收数据。
47.在其它实施例中,跟踪器44、46、48可以具有无源标志器(未示出),诸如反射从摄像机单元36发射的光的反射器。然后,由光学传感器40接收所反射的光。有源布置和无源布置在本领域中是众所周知的。
48.跟踪器44、46、48中的每一个还包括测量跟踪器44、46、48的角速度的3维陀螺仪传感器60。如本领域技术人员所熟知的,陀螺仪传感器60输出指示相对于陀螺仪坐标系的x轴、y轴和z轴的角速度的读数。这些读数乘以由制造商定义的转换常量以获得相对于陀螺仪坐标系的x轴、y轴和z轴的每个的以度/秒为单位的测量值。然后,这些测量值可以被转换
manipulator operable in manual or semi
‑
autonomous mode”的美国专利申请no.13/958,834(其公开内容通过引用合并于此)中所描述的,操纵器控制器54可以使用该数据来控制机器人操纵器56。
59.导航处理器52还生成图像信号,该图像信号指示外科器械工作端相对于外科部位的相对位置。这些图像信号应用于显示器28、29。显示器28、29基于这些信号生成图像,该图像允许外科医生和工作人员查看外科器械工作端相对于外科部位的相对位置。如上面讨论的,显示器28、29可以包括允许命令输入的触摸屏或者其它输入/输出装置。
60.ii.坐标系和变换
61.参照图3,通常参考定位器坐标系lclz进行对象的跟踪。定位器坐标系具有原点和方向(一组x轴、y轴和z轴)。在程序期间,一个目标是要保持定位器坐标系lclz静止。如将在下面进一步描述的,安装至摄像机单元36的加速度计可以用于跟踪定位器坐标系lclz的突然或者意外的运动(如当摄像机单元36被外科人员无意中碰撞时可能发生的)。
62.每个跟踪器44、46、48和当前跟踪的对象还具有它自己的独立于定位器坐标系lclz的坐标系。具有它们自己坐标系的导航系统20的组件是骨骼跟踪器44、46和器械跟踪器48。这些坐标系分别被表示为骨骼跟踪器坐标系btrk1、btrk2和器械跟踪器坐标系tltr。
63.导航系统20通过监控牢固地附接至骨骼的骨骼跟踪器44、46的位置来监控患者的股骨f和胫骨t的位置。股骨坐标系是fbone以及胫骨坐标系是tbone,该股骨坐标系和胫骨坐标系是牢固地附接有骨骼跟踪器44、46的骨骼的坐标系。
64.在开始程序之前,生成股骨f和胫骨t的(或者在其它实施例中其它组织的)手术前图像。这些图像可以基于患者解剖结构的mri扫描、放射性扫描或者计算机断层摄影(ct)扫描。使用本领域中公知的方法将这些图像映射至股骨坐标系fbone和胫骨坐标系tbone。在一个实施例中,具有其自己的跟踪器pt的指针式器械p(参考图2)(诸如malackowski等人的美国专利no.7,725,162中所公开的,其通过引用合并于此)可以用于将股骨坐标系fbone和胫骨坐标系tbone映射至手术前图像。这些图像在股骨坐标系fbone和胫骨坐标系tbone中是固定的。
65.在程序的初始阶段期间,骨骼跟踪器44、46牢固地固定至患者的骨骼。坐标系fbone和tbone的位姿(位置和方向)被分别映射至坐标系btrk1和btrk2。给定骨骼与它们的骨骼跟踪器44、46之间的固定关系,在整个程序期间,坐标系fbone和tbone的位姿分别相对于坐标系btrk1和btrk2保持固定。在与操纵器控制器54和导航处理器52两者集成在一起的存储器中存储描述位姿的数据。
66.外科器械22的工作端(还称为能量施加器末端)具有它自己的坐标系eapp。例如,坐标系eapp的原点可以表示外科切割钻的质心。在程序开始之前,使坐标系eapp的位姿固定至器械跟踪器坐标系tltr的位姿。因此,确定了这些坐标系eapp、tltr相对于彼此的位姿。在与操纵器控制器54和导航处理器52两者集成在一起的存储器中存储描述位姿的数据。
67.iii.软件
68.参照图2,定位引擎100是软件模块,该软件模块可以被认为是导航系统20的一部分。定位引擎100的组件在导航处理器52上运行。在本发明的一些版本中,定位引擎100可以在操纵器控制器54上运行。
69.定位引擎100从摄像机控制器42接收基于光学的信号以及从跟踪器控制器62接收基于非光学的信号作为输入。基于这些信号,定位引擎100在定位器坐标系lclz中确定骨骼跟踪器坐标系btrk1和btrk2的位姿(位置和方向)。基于为器械跟踪器48接收的相同信号,定位引擎100在定位器坐标系lclz中确定器械跟踪器坐标系tltr的位姿。
70.定位引擎100将表示跟踪器44、46、48的位姿的信号转发至坐标变换器102。坐标变换器102是在导航处理器52上运行的导航系统软件模块。坐标变换器102参考限定患者的手术前图像与患者跟踪器44、46之间的关系的数据。坐标变换器102还存储指示外科器械的工作端相对于器械跟踪器48的位姿的数据。
71.在程序期间,坐标变换器102接收指示跟踪器44、46、48相对于定位器34的相对位姿的数据。基于这些数据和先前加载的数据,坐标变换器102生成指示坐标系eapp以及骨骼坐标系fbone和tbone两者相对于定位器坐标系lclz的相对位置和方向的数据。
72.因此,坐标变换器102生成指示外科器械22的工作端相对于应用器械工作端的组织(例如,骨骼)的位置和方向的数据。表示这些数据的图像信号被转发至显示器28、29,使外科医生和工作人员能够查看该信息。在某些实施例中,可以将表示这些数据的其它信号转发至操纵器控制器54以控制操纵器56和外科器械22的对应运动。
73.由于用于在定位器坐标系lclz中确定跟踪器坐标系btrk1、btrk2、tltr中的每一个的位姿的步骤是相同的,因此将仅详细描述一个。图4示出的步骤仅基于一个正激活的跟踪器,跟踪器44。在下列描述中,跟踪器44的led将由标号50a、50b、50c表示,其标识第一50a led、第二50b led和第三50c led。
74.图4中阐述的步骤示出了使用基于光学的传感器数据和基于非光学的传感器数据以确定跟踪器44的led 50a、50b、50c的位置。导航处理器52可以从这些位置确定跟踪器44的位置和方向,并且因此确定跟踪器44附接的股骨f的位置和方向。来源于由光学传感器40接收的信号的基于光学的传感器数据提供基于视线的数据,该数据依赖led 50a、50b、50c与光学传感器40之间的视线。然而,提供用于生成基于非光学的传感器数据的基于非光学的信号的陀螺仪传感器60不依赖视线并且因此可以集成到导航系统20中以(在led 50a、50b、50c中的两个当前没有被测量时(由于一次仅测量一个led)或者在程序期间led 50a、50b、50c中的一个或者多个对光学传感器40不可见时)更好地近似led 50a、50b、50c的位置。
75.在第一初始化步骤200中,系统20在定位器坐标系lclz中测量用于跟踪器44的led 50a、50b、50c的位置以建立初始位置数据。通过顺序地点亮led 50a、50b、50c获得这些测量值,该led向光学传感器40传输光信号。一旦光信号由光学传感器40接收,则对应信号由光学传感器40生成并且被传输到摄像机控制器42。led 50a、50b、50c的点亮之间的频率是100hz或者更大,优选地为300hz或者更大,并且更优选地为500hz或者更大。在某些情况下,点亮之间的频率是1000hz或者点亮之间为1毫秒。
76.在一些实施例中,光学传感器40一次仅可以读取一个led。如在malackowski等人的美国专利no.7,725,162(其通过引用合并于此)中描述的,摄像机控制器42可以通过一个或者多个红外收发器或者rf收发器(在摄像机单元36和跟踪器44上)控制led 50a、50b、50c的点亮。可选地,在没有来自摄像机控制器42的指令的情况下,可以在本地激活跟踪器44(诸如通过跟踪器44上的开关),该跟踪器44一旦被激活则顺序地点亮其led 50a、50b、50c。
77.基于来自光学传感器40的输入,摄像机控制器42生成原始位置信号,该原始位置信号接着被发送至定位引擎100以在定位器坐标系lclz中确定对应的三个led 50a、50b、50c中的每一个的位置。
78.在初始化步骤200期间,为了建立初始位置数据,跟踪器44的运动必须小于预定阈值。预定阈值的值存储在导航计算机26中。步骤200中建立的初始位置数据主要提供三个led 50a、50b、50c在初始时间t0处的位置的静态快照,从这里来作为该处理的剩余步骤的基础。在初始化期间,在循环(即,三个led测量中的每个组)之间由定位引擎100计算led 50a、50b、50c的速度并且一旦速度足够低(即,小于显示几乎没有运动发生的预定阈值),则建立初始位置数据或者静态快照。在一些实施例中,预定阈值(还称为静态速度极限)是沿着任何轴200mm/s或者更小,优选地为100mm/s或者更小,并且更优选地为10mm/s或者更小。当预定阈值是100mm/s时,那么所计算的速度必须小于100mm/s以建立静态快照。
79.参照图4和4a,在步骤202中,一旦获得静态快照,则将所测量的led 50a、50b、50c的位置与跟踪器44的模型相比较。模型是存储在导航计算机26中的数据。模型数据指示在跟踪器坐标系btrk1中跟踪器44上的led的位置。系统20存储了每个跟踪器44、46、48的led 50在每个跟踪器的坐标系中的编号和位置。对于跟踪器44、46、48,它们的坐标系的原点被设置在跟踪器44的所有led位置的质心处。
80.定位引擎100利用刚体匹配算法或者点匹配算法使定位器坐标系lclz中测量的led 50a、50b、50c与存储的模型中的led匹配。一旦确定最佳拟合,则定位引擎100对拟合的偏差进行评估以确定测量的led 50a、50b、50c是否在所存储的模型的预定公差范围内。公差可以基于对应led之间的距离,以使得如果拟合导致距离太大,就不得不重复初始化步骤。在一些实施例中,led的位置不能偏离模型超过2.0mm,优选地不能超过0.5mm,并且更优选地不能超过0.1mm。
81.在步骤204中,如果拟合在预定公差内,则生成变换矩阵以将模型中任何其它未测量的led从骨骼跟踪器坐标系btrk1变换成定位器坐标系lclz。如下面进一步解释的,如果使用超过三个led或者如果使用虚拟led,则利用该步骤。在一些实施例中,跟踪器44、46、48可以具有四个或者更多个led。一旦建立定位器坐标系lclz中的所有位置,则创建led云。led云是跟踪器44上的所有led 50a、50b、50c基于所有led 50a、50b、50c在定位器坐标系lclz中的x轴、y轴和z轴位置在定位器坐标系lclz中的布置。
82.一旦初始建立了led云,则导航系统20可以在外科程序期间进行对跟踪器44的跟踪。如先前讨论的,这包括点亮序列中的下一个led。为了说明,led 50a现在被点亮。因此,led 50a向光学传感器40传输光信号。一旦光信号由光学传感器40接收,则对应信号由光学传感器40生成并且被传输到摄像机控制器42。
83.基于来自光学传感器40的输入,摄像机控制器42生成原始位置信号,该原始位置信号接着被发送至定位引擎100以在时间t1处确定led 50a相对于定位器坐标系lclz的x轴、y轴和z轴的新位置。这在步骤206中显示为新的led测量。
84.应当理解,为了说明性目的,使用时间指示(诸如t0、t1...tn)以指示不同时间或者不同的时间范围或时间段,并且不将本发明限制于特定时间或者明确时间。
85.在步骤208中,利用确定的led 50a的新位置,led 50a的线速度矢量可以由定位引擎100计算。
86.跟踪器44被看作刚体。因此,led 50a的线速度矢量是等于其线性位置的时间变化率的矢量量。定位器坐标系lclz中每个led的速度(甚至每个led的加速度)可以由先前和目前测量的该led在定位器坐标系lclz中的位置和时间来计算。先前和目前测量的led的位置和时间定义该led的位置历史。led 50a的速度计算可以采用下列的最简单形式:
[0087][0088]
其中是先前在时间t
p
处测量的led 50a的位置;以及是当前在时间t
n
处测量的led 50a的位置。如本领域技术人员众所周知的,还可以通过对每个led的led位置历史进行数据拟合来获得该led的速度和/或加速度。
[0089]
在时间t1处,在步骤210中,陀螺仪传感器60还测量跟踪器44的角速度。陀螺仪传感器60向跟踪器控制器62传输与该角速度相关的信号。
[0090]
然后,跟踪器控制器62向定位引擎100传输对应信号以使得定位引擎100可以根据这些信号计算角速度矢量在步骤210中,还将陀螺仪坐标系变换为骨骼跟踪器坐标系btrk1,以使得在骨骼跟踪器坐标系btrk1中表示由定位引擎100计算的角速度矢量
[0091]
在步骤212中,相对于位置矢量为骨骼跟踪器坐标系btrk1的原点计算相对速度矢量该位置矢量还存储在导航计算机26中的存储器中以由定位引擎100访问用于进行下列计算。该计算通过计算来源于陀螺仪信号的角速度矢量与从led 50a到原点的位置矢量的矢量积确定骨骼跟踪器坐标系btrk1的原点的相对速度
[0092][0093]
然后,定位引擎100为剩余未测量的led 50b、50c(由于这些led没有点亮并且因此它们的位置没有被测量而是未测量的)计算相对速度矢量可以相对于骨骼跟踪器坐标系btrk1的原点计算这些速度矢量。
[0094]
由定位引擎100执行以确定每个未测量的led 50b、50c在时间t1处的相对速度矢量的计算是基于时间t1处的角速度矢量与位置矢量和的矢量积,该位置矢量和是从骨骼跟踪器坐标系btrk1的原点到每个未测量的led50b、50c得到的。这些位置矢量和存储在导航计算机26中的存储器中以由定位引擎100访问用于进行下列计算:
[0095][0096][0097]
另外,在步骤212中,使用步骤202中确定的变换矩阵将在骨骼跟踪器坐标系btrk1中计算的这些相对速度转换到定位器坐标系lclz中。定位器坐标系lclz中的相对速度用于步骤214中的计算。
[0098]
在步骤214中,首先由定位引擎100基于在时间t1处测量的led 50a的速度矢量计算骨骼跟踪器坐标系btrk1的原点在定位器坐标系lclz中的速度矢量通过将相对于led 50a到原点的位置矢量表示的时间t1处的led 50a的速度矢量与时间t1处的原点的相对速度矢量相加来计算速度矢量因此,将时间t1处的原点的速度矢量计算如下:
[0099][0100]
现在可以由定位引擎100计算定位器坐标系lclz中剩余的未测量的led在时间t1处的速度矢量,该计算基于在时间t1处在定位器坐标系lclz中骨骼跟踪器坐标系btrk1的原点速度矢量并基于相对于该剩余的未测量的led到骨骼跟踪器坐标系btrk1的原点的位置矢量所表示的在时间t1处它们各自的相对速度矢量。如下计算在时间t1处这些速度矢量:
[0101][0102][0103]
在步骤216中,定位引擎100基于所计算的led 50b、50c的速度矢量和时间的变化计算未测量的led 50b、50c中的每一个从时间t0到时间t1的运动(即,(在笛卡尔坐标中)位置的变化δx)。在一些实施例中,对于每个led测量的时间变化δt是两毫秒或者更小,以及在一些实施例中为一毫秒或者更小。
[0104][0105][0106]
然后,可以将这些计算的位置(x,y,z)中的变化与先前确定的led 50b、50c中的每一个在定位器坐标系lclz中的位置相加。因此,在步骤218中,可以将位置变化与在静态快照期间确定的led 50b、50c在时间t0处的先前位置相加。这表示如下:
[0107]
x(led50b)
t1
=x(led50b)
t0
+δx(led50b)
[0108]
在步骤220中,将这些计算的led 50b、50c中的每一个在时间t1处的位置与在时间t1处确定的led50a的位置组合。然后使用点匹配算法或者刚体匹配算法将新确定的led 50a、50b、50c的位置匹配到跟踪器44的模型以获得最佳拟合。该最佳拟合计算的结果(如果在系统20的限定公差内)是由导航处理器52创建新的变换矩阵以将骨骼跟踪器坐标系btrk1链接到定位器坐标系lclz。
[0109]
在步骤222中利用新的变换矩阵将未测量的led 50b、50c的新计算的位置调节至模型以提供调节的位置。还可以由于匹配算法调节led 50a的测量位置以使该测量位置也被重新计算。这些调节被认为是对led云的更新。在一些实施例中,在匹配步骤期间,led 50a的测量位置固定至led 50a的模型的位置。
[0110]
随着最佳拟合变换完成,定位器坐标系lclz中的led 50a的测量(和可能的调节的)位置和led 50b、50c的计算(以及调节)位置使坐标变换器102能够基于先前描述的股骨坐标系fbone、骨骼跟踪器坐标系btrk1与定位器坐标系lclz之间的关系确定股骨f的新位置和方向。
[0111]
然后,步骤206至222在下一个时间t2处重复并且以的led 50b在定位器坐标系lclz中的测量开始,其中led 50a、50c是未测量的led。由于该循环,在每个时间t1、t2...tn处,每个led 50a、50b、50c的位置或者被测量(在每个时间处点亮一个led)或者基于由光学传感器40和陀螺仪传感器60进行的测量以正被非常精确地近似的计算位置来计算。可以由定位引擎100按照至少100hz(更优选地为至少300hz以及最优选地为至少500hz)的频率实施该步骤206至222的循环以确定led 50的新位置。
[0112]
参照图5,led云还可以包括虚拟led,该虚拟led是模型上标识的预定点,但实际上不与跟踪器44上的物理led相对应。还可以在时间t1、t2...tn处计算这些点的位置。参考图4,可以以与未测量的led相同的方式计算这些虚拟led。唯一的不同是由于虚拟led不与任何光源相对应,因此虚拟led从不点亮或者包括在光学测量的序列中,而实质上仅仅是虚拟的。步骤300
‑
322显示用于使用真实和虚拟led跟踪跟踪器44、46、48的步骤。除添加虚拟led外,步骤300
‑
322通常与步骤200
‑
222相对应,使用上面描述的相同的式子类似于未测量的led来处理该虚拟led。
[0113]
使用除led 50a、50b、50c以外的虚拟led的一个目的是例如要减少上面描述的速度计算中的误差影响。尽管这些误差可能对led 50a、50b、50c的计算位置几乎没有影响,但是感兴趣的点离led 50a、50b、50c越远,这些误差越可能被放大。例如,当用跟踪器44跟踪股骨f时,并入跟踪器44中的led 50a、50b、50c可以经受它们的计算位置的微小误差为大约0.2毫米。然而,考虑可以位于距离led 50a、50b、50c超过10厘米处的股骨f的表面。在led 50a、50b、50c处0.2毫米的微小误差可以对股骨f的表面导致0.4到2毫米的误差。股骨f离led 50a、50b、50c越远,误差增大地越多。如下所述,在图5的步骤中使用虚拟led可以减轻这种误差的潜在放大。
[0114]
参照图5a,可以在股骨f的表面上安置一个虚拟led 50d。可以在骨骼跟踪器坐标系btrk1中的任意位置处安置其它虚拟led 50e、50f、50g、50h、50i、50j、50k,诸如沿着x轴、y轴和z轴中的每一个,以及在沿着这些轴的原点的两侧上以产生6个虚拟led。这些虚拟led被包括为图5a所示的跟踪器44的模型的一部分并且用于步骤302和320。在一些实施例中,仅使用虚拟led 50e
‑
50k。在其它实施例中,可以在沿着x轴、y轴和z轴中的每一个的位置处(但是在距离骨骼跟踪器坐标系btrk1的原点的不同距离处)安置虚拟led。在更进一步的实施例中,虚拟led中的一些或者全部可以位于轴x、y和z之外。
[0115]
现在在模型中有真实led 50a、50b、50c和虚拟led 50d
‑
50k。在每个时间t1、t2...tn处,该扩展模型在步骤320中与真实led 50a、50b、50c的测量/计算位置以及虚拟led 50d
‑
50k的计算位置相匹配以获得使骨骼跟踪器坐标系btrk1与定位器坐标系lclz链接的变换矩阵。现在,利用包括在模型中的虚拟led 50d
‑
50k(位于远离真实led 50a、50b、50c的位置处),可以减小旋转矩阵的误差。实质上,刚体匹配算法或者点匹配算法具有用于匹配的附加点并且这些附加点中的一些位于限定真实led 50a、50b、50c的点的径向外侧,从而旋转地稳定该匹配。
[0116]
在图5的过程的另一个变型中,虚拟led 50e
‑
50k的位置可以在使用期间根据跟踪器44的运动而动态地变化。跟踪器44移动得越慢,时间t1处的未测量的真实led 50b、50c以及虚拟led 50e
‑
50k的计算的位置越精确。因此,可以基于跟踪器44的速度调节沿着x轴、y轴和z轴的虚拟led 50e
‑
50k相对于骨骼跟踪器坐标系btrk1的原点的位置。因此,如果虚拟
led 50e
‑
50k的位置分别表示为(s,0,0)、(
‑
s,0,0)、(0,s,0)、(0,
‑
s,0)、(0,0,s)、(0,0,
‑
s),那么当跟踪器44缓慢移动时s将增大并且当跟踪器44较快移动时s将减小到较小的值。这可以由针对s的经验公式处理或者可以基于对速度和计算的位置的估计对s进行调节。
[0117]
可以按照至少100hz(更优选地为至少300hz以及最优选地为至少500hz)的频率实施对led 50(真实和虚拟)的新位置的确定。
[0118]
可以在由于视线干扰而阻碍led 50的光学测量的情况下使用来自加速度计70的数据。当要测量的led被阻挡时,定位引擎100假定原点的恒定速度以估算位置。然而,在该情况下的恒定速度假定可能是不精确的并且可能导致误差。加速度计70主要监控该时间段中恒定速度假定是否精确。图6和7所示步骤图示了如何检查该假定。
[0119]
继续使用跟踪器44作为示例,图6的步骤400
‑
422通常与来自图5的步骤300
‑
322相对应。然而,在步骤424中,系统20确定在测量的上一个循环中是否测量了小于3个led(意味着在该循环中不能对led中的一个或者多个进行测量)。这可能由视线问题等引起。针对跟踪器44的循环是上三次尝试的测量。如果在上三次测量期间,led 50a、50b、50c中的每一个是可见的并且可以被测量,那么系统20进行到步骤408并且如前面参照图5描述的继续。
[0120]
如果系统20确定led 50a、50b、50c中的一个或者多个在该循环期间不能被测量(即,被阻挡测量),那么算法仍然移动至步骤408,但是如果要在步骤406中测量的新的led是不能被测量的led,那么如下所述系统做出一些速度假定。
[0121]
当在步骤406中led(诸如led 50a)在其测量时间tn处没有被光学传感器40看到时,在前面的时间t(n
‑
1)处先前计算的跟踪器44的原点在定位器坐标系lclz中的速度矢量被假定保持恒定。因此,可以基于先前计算的定位器坐标系lclz中的速度矢量和led 50a、50b、50c的相对速度矢量(该相对速度矢量来源于来自陀螺仪60的新测量的角速度矢量)计算led 50a、50b、50c在定位器坐标系lclz中的速度矢量。然后,可以使用在步骤316
‑
322中描述的式子确定led 50a、50b、50c的新位置。
[0122]
开始,当要在步骤406处测量led 50a,但是被阻碍时,原点的速度矢量被假定与先前的计算相同。因此,在步骤408处没有计算新led的速度:
[0123][0124]
步骤410与步骤310一样进行。
[0125]
然后,步骤412中计算的led 50a、50b、50c的相对速度矢量基于骨骼跟踪器坐标系btrk1中来自陀螺仪60的新测量的角速度矢量和先前的速度矢量
[0126][0127][0128][0129]
在步骤414中,可以使用led 50a、50b、50c的相对速度矢量和原点速度矢量计算定位器坐标系lclz中的速度矢量:
[0130]
[0131][0132][0133]
步骤416至422与步骤316
‑
322一样进行。
[0134]
如果系统20在步骤424处确定在循环期间led 50a、50b、50c中的一个或者多个不能被测量(即,被阻挡测量),那么在图7所示步骤500
‑
506处同时实施另一个算法直到进行了测量的完整循环,其中在循环中所有led 50a、50b、50c都对光学传感器40可见。因此,系统20被认为在“阻挡”状态中直到进行了具有所有可见测量的完整循环。
[0135]
当系统20处于阻挡状态中时连续地实施步骤500
‑
506。
[0136]
在步骤500中,导航处理器52启动时钟,该时钟跟踪系统20处于阻挡状态中多久。阻挡状态的时间在下面称为t(阻挡)。
[0137]
在步骤502中,加速度计70沿着骨骼跟踪器坐标系btrk1的x轴、y轴和z轴测量加速度以跟踪恒定速度假定中的误差。像陀螺仪读数一样,将加速度计读数从加速度计坐标系变换为骨骼跟踪器坐标系btrk1。
[0138]
如果加速度计70检测到超过一个或者多个预定加速度公差的一个或者多个加速度,导航计算机26将把系统置入误差状态中。可以沿着每个x轴、y轴和z轴对加速度公差进行不同的限定,或者沿着每个轴进行相同的限定。如果测量的加速度超过公差,那么恒定速度假定不可靠并且不能用于外科导航的特定应用。可以对不同应用采用不同公差。例如,在机器人切割期间,公差可以非常低,但是仅对于视觉导航(即,不反馈用于切割控制环路),可以将公差设置得更高。
[0139]
在步骤504中,将与led 50相对于光学传感器40的位置相关联的速度误差考虑在内并且在阻挡状态期间对该速度误差进行监控。对于led 50中的每一个,阻挡状态的时间t
阻挡状态
乘以速度误差v
误差
必须小于位置误差公差γ并且因此必须满足下列式子以防止系统20被置入误差状态中:
[0140]
v
误差
×
t
阻挡状态
<γ
[0141]
在该式子中,对于led 50a、50b、50c中的每一个计算速度误差v
误差
如下:
[0142][0143]
位置误差x
误差(t)
和x
误差(t
‑
1)
是系统20中的预定义位置误差,该位置误差基于在时间t和t
‑
1处相对于光学传感器40的位置。实质上,led 50a、50b 50c离光学传感器40越远,潜在的位置误差越高。在实验上或者理论上得到这些位置误差并且将这些位置误差放到查找表或者公式中,以使得在笛卡儿坐标(x,y,z)中的led 50a、50b、50c的每个位置处提供关联位置误差。
[0144]
在步骤504中,定位引擎100访问该查找表或者计算该公式以对当前时间t和在前面的时间t
‑
1处的led 50a、50b、50c中的每一个确定位置误差。因此,位置误差基于在当前时间t和前面的时间t
‑
1处在步骤422中由系统20计算的定位器坐标系lclz中的笛卡儿坐标中的位置。时间变量δt表示后续的位置计算所用的时间,因此为了说明性目的,t与t
‑
1之间的差可以是1毫秒。
[0145]
在导航计算机26中预定义位置误差公差γ以由定位引擎100访问。位置误差公差
γ可以用毫米表示。位置误差公差γ可以在从0.001毫米到1毫米范围内并且在一些实施例中被具体地设置为0.5毫米。因此,如果位置误差公差γ设置为0.5毫米,那么必须满足下列式子:
[0146]
v
误差
×
t
阻挡状态
<0.5毫米
[0147]
如可以看见的,系统20处于阻挡状态越久,时间变量在该式子中的作用越大并且因此将容许的速度误差越小。在一些实施例中,由定位引擎100在步骤504中单独地对于led 50a、50b、50c中的每一个计算该式子。在其它实施例中,由于led 50a、50b、50c在跟踪器44上布置的紧密程度,因此在该计算中仅使用led 50a、50b、50c中的一个的速度误差以确定顺应性。
[0148]
在步骤506中,当一个或者多个误差超过位置误差公差γ时,将系统20放置在误差状态中。在这种状态中,例如,切割或者消融工具的任何控制或者运动被停止并且工具被关闭。
[0149]
iv.其它实施例
[0150]
在一个实施例中,当正在主动跟踪跟踪器44、46、48中的每一个时,led的点亮发生以使得来自跟踪器44的一个led被点亮,然后来自跟踪器46的一个led被点亮,然后来自跟踪器48的一个led被点亮,然后来自跟踪器44的第二led被点亮,然后来自跟踪器46的第二led被点亮等等直到所有led都被点亮,然后重复该序列。该点亮顺序可以通过从摄像机单元36上的收发器(未示出)发送至跟踪器44、46、48上的收发器(未示出)的指令信号发生。
[0151]
可以以闭合环路方式使用导航系统20以控制由外科切割工具实施的外科程序。器械22和正切割的解剖结构两者都配备有跟踪器50,以使得导航系统20可以跟踪器械22和正切割的解剖结构(诸如骨骼)的位置和方向。
[0152]
在一个实施例中,导航系统是用于治疗组织的机器人外科系统的一部分。在一些版本中,机器人外科系统是用于从患者的解剖结构(诸如骨骼或者软组织)切除物质的机器人外科切割系统。切割系统可以用于为外科植入物(诸如臀部和膝部植入物(包括单腔膝部植入物、双腔膝部植入物或者全膝部植入物))准备骨骼。在标题为“prosthetic implant and method of implantation”的美国专利申请no.13/530,927中示出了这些类型的植入物中的一些,该申请的公开内容通过引用合并于此。
[0153]
机器人外科切割系统包括操纵器(参见,例如,图1)。操纵器具有多个臂和由所述多个臂中的至少一个承载的切割工具。机器人控制系统在至少5个自由度上控制或者约束切割工具的运动。在标题为“surgical manipulator capable of controlling a surgical instrument in either a semi
‑
autonomous mode or a manual,boundary constrained mode”的美国临时专利申请no.61/679,258(其通过引用合并于此)以及也在标题为“navigation system for use with a surgical manipulator operable in manual or semi
‑
autonomous mode”的美国专利申请no.13/958,834(其公开内容通过引用合并于此)中示出了这种操纵器和控制系统的示例。
[0154]
在该实施例中,导航系统20与机器人控制系统(其可以包括操纵器控制器54)进行通信。导航系统20将位置和/或方向数据传递至所述机器人控制系统。位置和/或方向数据表示器械22相对于解剖结构的位置和/或方向。该通信提供闭环控制用以控制解剖结构的切割以使得切割在预定义边界内发生。
[0155]
在该实施例中,操纵器运动可以与led测量值一致以使得对于获得的每个led测量值,都有通过操纵器56的器械22的对应运动。然而,这可能并不一直是这样的。例如,在上个led测量值与通过操纵器56的运动之间可能有这样的滞后,以至于从导航计算机26发送至操纵器56的位置和/或方向数据对控制环路运动来说变得不可靠。在这种情况下,导航计算机26可以配置为还向操纵器控制器54传输运动学数据。这种运动学数据包括先前确定的针对跟踪器44、46、48的线性速度和角速度。由于已经知道了速度,因此可以基于滞后时间计算位置。然后,为了控制操纵器56的运动,操纵器控制器54可以计算跟踪器44、46、48的位置和方向,并且因此计算器械22(或者器械尖端)相对于股骨f和/或胫骨t的相对位置和方向。
[0156]
在该实施例中,器械22由图1所示操纵器或者提供对运动的某种形式的机械约束的其它机器人掌握。该约束将器械22的运动限制在预定义边界内。如果器械22偏离到预定义边界外,则向器械22发送控制以停止切割。
[0157]
当在这些系统中实时跟踪器械22和正切割的解剖结构两者时,可以消除将解剖结构刚性地固定就位的需要。由于器械22和解剖结构两者被跟踪,因此可以基于器械22相对于解剖结构的相对位置和/或方向调节对器械22的控制。此外,器械22和解剖结构在显示器上的表示可以相对于彼此移动以仿真它们的现实世界运动。
[0158]
在一个实施例中,股骨f和胫骨t中的每一个具有要由外科器械22的工作端去除的物质的目标体。目标体由一个或者多个边界限定。边界限定在程序之后应当保留的骨骼的表面。在一些实施例中,如在标题为“surgical manipulator capable of controlling a surgical instrument in either a semi
‑
autonomous mode or a manual,boundary constrained mode”的临时专利申请no.61/679,258(其通过引用合并于此)中所公开的,系统20跟踪和控制外科器械22以保证工作端(例如,钻)仅去除物质的目标体而不延伸到边界以外,
[0159]
在描述的实施例中,通过利用由坐标变换器102生成的数据完成对器械22的控制,该数据指示钻或者其它切割工具相对于目标体的位置和方向。通过知道这些相对位置,可以控制外科器械22或者外科器械安装至其上的操纵器以使得仅去除期望物质。
[0160]
在其它系统中,器械22具有可在三个自由度上相对于手持壳体移动并且由外科医生的手手动安置的切割工具,而不需要切割悬臂、引导臂或者其它约束机构的帮助。在标题为“surgical instrument including housing,a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing”的美国临时专利申请no.61/662,070(其公开内容通过引用合并于此)中示出了这种系统。
[0161]
在这些实施例中,系统包括具有切割工具的手持外科切割器械。如标题为“surgical instrument including housing,a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing”的美国临时专利申请no.61/662,070(其公开内容通过引用合并于此)所示,控制系统使用内部致动器/马达控制切割工具在至少3个自由度上的运动。导航系统20与控制系统进行通信。一个跟踪器(诸如跟踪器48)安装至器械。其它跟踪器(诸如跟踪器44、46)安装至患者的解剖结构。
[0162]
在该实施例中,导航系统20与手持式外科切割器械的控制系统进行通信。导航系
统20将位置和/或方向数据传递至控制系统。位置和/或方向数据表示器械22相对于解剖结构的位置和/或方向。该通信提供闭环控制以控制解剖结构的切割,使得切割发生在预定义边界(术语预定义边界被理解为包括预定义轨线、体积、线路、其它形状或者几何形状等等)内。
[0163]
本发明的特征可以用于跟踪定位器坐标系lclz的突然或者意外的运动,如当摄像机单元36被外科人员撞击时可能发生。安装至摄像机单元36的加速度计(未示出)监控撞击并且如果检测到撞击则停止系统20。在该实施例中,加速度计与摄像机控制器42进行通信并且如果沿着x轴、y轴或者z轴的任何一个所测量的加速度超过预定值,那么摄像机控制器42向导航计算机26发送对应信号以禁用系统20并且等待摄像机单元36稳定并且重新开始测量。在某些情况下,在重新开始导航之前,将不得不重复初始化步骤200、300、400。
[0164]
在一些实施例中,将虚拟led安置在器械22的工作尖端处。在该实施例中,虚拟led位于器械跟踪器48的模型中的工作尖端的位置处,以使得工作尖端位置被连续地计算。
[0165]
所预期的权利要求的一个目标在于覆盖本发明的真实精神和范围内的所有这种修改和变型。此外,尽管上面描述的实施例与医疗应用相关,但是此处描述的发明还可适用于其它应用(诸如工业、航空航天、防护等等)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1