基于交叉弯曲梁结构的切口型连续体机器人
1.本发明涉及连续体机器人技术领域,具体地,涉及一种基于交叉弯曲梁结构的切口型连续体机器人。
背景技术:
2.目前,随着微创手术的发展,连续体机器人在医疗器械领域得到越来越广泛的应用,尤其在人体腔道介入和脏器微创手术中,连续体机器人凭借其结构微小紧凑、柔顺性高、灵活易控制等特性,相比于传统的刚性手术器械具备较大的优越性,能有效减少与人体内器官、组织的接触碰撞,减少对身体的伤害并精确定位病灶位置。
3.切口型连续体机器人是柔性手术机器人中的典型代表,其通过在刚性管外壁刻蚀图案,切除一定的材料,形成一个单一整体性的柔性器械。相比于传统铰链式蛇骨连续体机构(申请号为cn109895073a的中国专利,公开了“一种片弹簧驱动的连续体机器人;申请号为cn111230845b的中国专利,公开了“一种拉弯型连续体机器人单元及机器人”),切口型连续体机器人可以通过单一材料一体化制造,并通过驱动丝的拉伸收缩来完成整体的弯曲和偏转,具备零部件数量少、装配过程简易、连续体内部弯曲摩擦小等优势。因此,切口型连续体更适合用于制造小尺寸(3mm外径及以下)以及内外径比大的手术器械,可以保证器械在人体腔道内有效弯曲偏转的同时,具备较大的内部腔道以通入探针和活检钳等其他手术工具。
4.目前的微创手术中往往需要柔性手术机器人同时具备较大的运动范围和较高的刚度,较大的运动范围可以让手术器械在结构不规则和受限的人体腔道内具备更高的灵活度,而更高的刚度可以帮助连续体机器人更稳定地携带末端执行器械,并降低因为组织碰撞引起的定位误差。因而这两方面的保证可以整体上提高医疗器械在病灶区域的操作、定位精度,从而提高手术过程的安全性和成功率。但目前的切口型连续体机器人,往往难以同时保证较大的运动范围和较高的刚度,在提高某一方面性能的同时,往往会导致弯曲时材料应变过大,所需驱动力过大或结构复杂尺寸较大等问题(申请号为cn111761609a的中国专利,公开了“基于接触辅助结构的柔性连续体机器人”),因此急需开发一种能同时保证大运动范围和大刚度,且易于驱动和制造的切口型连续体机器人。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种基于交叉弯曲梁结构的切口型连续体机器人,采用激光切割的加工方式,构建具有交叉倾斜微梁的内外管柔性切口骨架,内外管骨架构相互嵌套构成绳驱连续体机器人,兼具较高的刚度和较大的运动范围。
6.本发明的目的是通过以下方案实现的:
7.本发明提供一种基于交叉弯曲梁结构的切口型连续体机器人,包括外管切口骨架,内管切口骨架和驱动绳,所述外管切口骨架内套设有所述内管切口骨架,所述外管切口骨架的侧壁设有驱动绳通道,所述驱动绳的一端穿过所述驱动绳通道后与切口型连续体机
器人的顶端固连;用以提供并传递驱动力,驱动连续体机器人偏转;
8.所述外管切口骨架包括多个外骨架弯曲关节和一个外骨架基座,所述内管切口骨架包括多个内骨架弯曲关节和一个内骨架基座;弯曲关节的个数依据连续体机器人的长度而定;
9.所述外骨架弯曲关节包括一对平行分布在外骨架侧壁的外骨架柔性微梁和连接在外骨架柔性微梁两端的外骨架圆环管壁,所述外骨架柔性微梁的轴线与连续体机器人整体的轴线方向呈一个夹角β1;0
°
<β1<90
°
;优选30
°
<β1<60
°
;具体角度依据外骨架弯曲关节的尺寸而定;
10.所述内骨架弯曲关节包括一对平行分布在内骨架侧壁的内骨架柔性微梁和连接在内骨架柔性微梁两端的内骨架圆环管壁,所述内骨架柔性微梁的轴线与连续体机器人整体的轴线方向呈一个夹角β2;0
°
<β2<90
°
;30
°
<β2<60
°
;具体角度依据内骨架弯曲关节的尺寸而定;
11.所述外骨架柔性微梁与所述内骨架柔性微梁的倾斜方向相反。倾斜角β1和β2,可根据弯曲范围要求而分别指定。具体的,柔性微梁通过激光切割形成,各自柔性微梁的轴线与连续体整体的轴线方向呈一个夹角,因此与柔性微梁两端的圆环管壁并不垂直,相比于传统的微梁沿着整体轴线方向的设计来说,本发明设计增加了微梁的有效弯曲长度,因而在同样的驱动力下,可达到更大的弯曲角度;当弯曲到同样的角度时,柔性微梁实际的应变会更小。
12.优选的,所述外管切口骨架和所述内管切口骨架分别由一根镍钛管加工而成。是因为镍钛材料良好的超弹性性能,整个连续体能保证较高的弯曲位置精度,且在实现较大弯曲范围的时候保证完好的应变特性。所述内管切口骨架中的内骨架柔性微梁和外管切口骨架中的外骨架柔性微梁是对刚性管激光切割留下管壁材料,连接在内骨架柔性微梁和外骨架柔性微梁两侧的内骨架圆环管壁和外骨架圆环管壁也是未经切除的部分,均分布在刚性管外壁上。经过激光切割的刚性管成为切口型柔性连续体,每个关节中的柔性微梁在受到驱动载荷时会发生弯曲变形,在顶部和基座处产生相对运动。
13.优选的,所述外骨架弯曲关节和所述内骨架弯曲关节的高度和数量相等,所述外骨架基座和所述内骨架基座的轴向高度相等。
14.优选的,所述外管切口骨架和所述内管切口骨架的壁厚相等,所述内管切口骨架的外径小于所述外管切口骨架的内径,两者呈间隙配合。以保证两者各自关节中柔性微梁的弯曲运动互不干涉。
15.优选的,一对所述外骨架柔性微梁之间的距离与所述外管切口骨架的内径相等;一对所述内骨架柔性微梁之间的距离与所述内管切口骨架的内径相等。
16.优选的,所述外骨架圆环管壁上和所述外骨架基座侧壁上均对称开设第一组外微孔和第二组外微孔,每组外微孔包括两个靠近且沿壁厚方向开设的通孔;所述内骨架圆环管壁上和所述内骨架基座侧壁上均对称开设第一组内微孔和第二组内微孔,每组内微孔包括两个靠近且沿壁厚方向开设的通孔;第一组外微孔和第一组内微孔对准,第二组外微孔与第二组内微孔对准。
17.优选的,从切口型连续体机器人的顶端向外骨架基座的方向开始数,奇数位的外骨架圆环管壁上对称开设第一组外微孔和第二组外微孔,与奇数位的外骨架圆环管壁位置
对应的奇数位内骨架圆环管壁上对称开设第一组内微孔和第二组内微孔。
18.优选的,用绳索将第一组外微孔和对应的第一组内微孔连接,并打结形成第一绳环,用绳索将第二组外微孔和对应的第二组内微孔连接,并打结形成第二绳环,所述第一绳环和第二绳环均与外骨架圆环管壁之间具有供驱动绳穿过的空间,多个所述第一绳环形成一个通道,多个所述第二绳环形成另一个通道,一根驱动绳穿过一个通道后与切口型连续体机器人的顶端的第一绳环固定,另一根驱动绳穿过另一个通道后与切口型连续体机器人的顶端的第二绳环固定。所述驱动绳穿过由侧壁绳环创建的通道,通道起到了对驱动绳的的约束作用;而驱动绳与内管切口骨架和外管切口骨架的顶端固连,用以提供并传递驱动力,驱动连续体机器人偏转。
19.优选的,所述外骨架圆环管壁的上端面和下端面与连续体机器人整体的中心轴线垂直,所述内骨架圆环管壁的上端面和下端面与连续体机器人整体的中心轴线垂直。
20.优选的,所述外骨架圆环管壁的上端面和/或下端面与连续体机器人整体的中心轴线不垂直,所述内骨架圆环管壁的上端面和/或下端面与连续体机器人整体的中心轴线不垂直。从而让连续体机器人可实现两侧范围不一样的弯曲,以适应更为复杂的手术环境和体内腔道。
21.优选的,所述驱动连续体机器人的驱动绳为不锈钢丝,由于其较高的弹性模量以及低延伸性,在驱动力较大时也能保证较高的精度;
22.与现有技术相比,本发明具有如下的有益效果:
23.(1)通过采用切口型连续体机器人结构,形成一个单一整体性的柔性器械,这样其部件数量少、装配过程简易、连续体内部弯曲摩擦小等优势,更适合用于制造小尺寸以及内外径比大的手术器械。切口型连续体机器人通过激光切割的方式在刚性管外壁刻蚀图案,切除一定的材料,使得原先的刚性管具备弯曲柔性。
24.(2)通过采用内外柔性切口骨架嵌套的结构,使得连续体机器人的柔性弯曲关节为两对相互交叉倾斜的微梁,该微梁由于更长的弯曲长度和交叉支撑的结构,使得连续体机器人在材料应变的限制下可达到更大的弯曲角度,也使得其具有更高的刚度。
25.(3)通过在切口骨架的侧壁设置微孔结构,内外切口骨架的主体得以相对固定和精准对齐,且保证了弯曲微梁相对弯曲的互不干扰。通过微孔,还可创建用于引导驱动绳的侧壁通道,解决了薄壁连续体机器人驱动绳安装的困难,使得连续体机器人可以具有更大的内外径比。
26.(4)通过调整内外切口骨架的切口形状,每个切口处左右两侧留下切口间距不等,小间距的一侧在机器人弯曲到较小角度时便会发生上下管壁的接触,而大间距的一侧则能够容许更大的弯曲角度,使得连续体机器人具有两侧非对称的弯曲范围,从而具有更高的灵活性。
附图说明
27.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
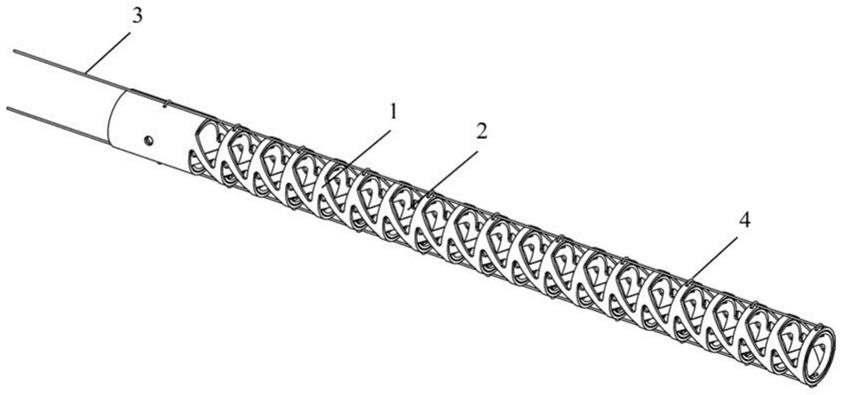
28.图1为本发明实施例1的基于交叉弯曲梁结构的切口型连续体机器人的立体图;
29.图2为图1的主视图;
30.图3为图1的俯视图;
31.图4为本发明实施例1中外管切口骨架的结构示意图;
32.图5为本发明实施例1中内管切口骨架的结构示意图;
33.图6为本发明实施例1中内骨架弯曲关节和外骨架弯曲关节配合的结构示意图;
34.图7为图6的主视图;
35.图8为本发明实施例2的基于交叉弯曲梁结构的切口型连续体机器人的立体图;
36.图9为图8的主视图;
37.图10为图8的仰视图。
具体实施方式
38.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
39.本发明的目的是针对现有技术存在的技术缺陷,提供一种基于交叉弯曲梁结构的切口构型,以构建兼具大运动范围和大刚度的连续体机器人。
40.一种基于交叉弯曲梁结构的切口型连续体机器人,包括外管切口骨架1,内管切口骨架2和驱动绳3。其中内管切口骨架2贯穿嵌套于外管骨架1内部。内管和外管切口骨架均包括n个弯曲关节和一个基座,其中每个关节包括一对对称分布在骨架两侧的柔性微梁和连接在微梁两端的圆环管壁;
41.内管和外管弯曲关节中的柔性微梁是对刚性管激光切割留下管壁材料,连接在微梁两侧的圆环管壁也是未经切除的部分,均分布在刚性管外壁上。经过激光切割的刚性管成为切口型柔性连续体,每个关节中的柔性微梁在受到驱动载荷时会发生弯曲变形,在顶部和基座处产生相对运动;
42.柔性微梁通过激光切割形成,各自微梁的轴线与连续体整体的轴线方向呈一个夹角,因此与柔性微梁两侧的圆环管壁并不垂直,相比于传统的微梁沿着整体轴线方向的设计来说,的设计增加了微梁的有效弯曲长度,因而在同样的驱动力下,可达到更大的弯曲角度;当弯曲到同样的角度时,微梁实际的应变会更小;
43.柔性微梁包括分布在连续体机器人两侧的两对,每对包含两个交叉分布的内外柔性微梁,使得单个关节具有较高的承受轴向压力的能力,避免了细长梁屈曲失效的产生,因而具有较高的刚度特性;
44.具体实现上,柔性的连续体外管和内管骨架本体是由镍钛管加工而成,由于镍钛材料良好的超弹性性能,整个连续体能保证较高的弯曲位置精度,且在实现较大弯曲范围的时候保证完好的应变特性;
45.外管切口骨架和内管切口骨架的各关节的数量相同,每个关节及基座的轴向长度相等;内管切口骨架11和外管切口骨架21的壁厚相同,内管骨架的外径略小于外管骨架的内径,二者嵌套时呈间隙配合,以保证两者各自关节中柔性微梁的弯曲运动互不干涉;
46.外管切口骨架关节中的柔性微梁12和内管切口骨架关节中的柔性微梁22为交叉倾斜分布。如图7所示,即微梁与其两端的圆环管壁成一定的夹角,外管和内管中的柔性微
梁分别为左斜和右斜,倾斜角分别为β1和β2,二者的倾斜角可根据弯曲范围要求而分别指定;
47.柔性微梁两端的圆环管壁在垂直于两个柔性微梁连线的平面上开有侧壁通孔,两侧对称分布各有一组紧靠的通孔,用于创建驱动绳通道和内外装配;每个切口骨架上有(n+1)/2组侧向通孔,且每隔一个关节设一组通孔,在基座中心侧壁也设有通孔;
48.具体的,外管和内管切口骨架上的侧边通孔均对齐,设有绳索穿过通孔将内外骨架的非柔性弯曲部分连接,使得内外骨架的非弯曲圆环管壁能保持位置相对固定;此外,设置绳索穿过每侧紧靠的一组通孔,创造一个结扣,该结扣并不会紧紧拴住内外管壁,而是留有一定的间隙,使得圆环内存在一定空间作为贯穿引导驱动绳的通道;
49.驱动绳3穿过由侧壁通孔上绳索创建的通道,通道起到了对驱动绳3的的约束作用;而驱动绳3与内管切口骨架和外管切口骨架的顶端固连,用以提供并传递驱动力,驱动连续体机器人偏转;
50.具体的,驱动连续体机器人的驱动绳3为不锈钢丝,由于其较高的弹性模量以及低延伸性,在驱动力较大时也能保证较高的精度;
51.实施例1
52.如图1至图7所示,一种基于交叉弯曲梁结构的切口型连续体机器人,包括外管切口骨架1,内管切口骨架2和驱动绳3,外管切口骨架1内套设有内管切口骨架2,外管切口骨架1的侧壁设有驱动绳通道4,驱动绳3的一端穿过驱动绳通道4后与切口型连续体机器人的顶端固连。外管切口骨架1和内管切口骨架2分别由一根镍钛管加工而成。
53.外管切口骨架1包括十九个外骨架弯曲关节11和一个外骨架基座15,内管切口骨架2包括十九个内骨架弯曲关节21和一个内骨架基座25;外骨架弯曲关节11和内骨架弯曲关节21的高度相等,外骨架基座15和内骨架基座25的轴向高度相等。外管切口骨架1和内管切口骨架2的壁厚相等,内管切口骨架2的外径小于外管切口骨架1的内径,两者呈间隙配合。以保证两者各自关节中柔性微梁的弯曲运动互不干涉。
54.外骨架弯曲关节11包括一对平行分布在外骨架侧壁的外骨架柔性微梁12和连接在外骨架柔性微梁12两端的外骨架圆环管壁13,一对外骨架柔性微梁12之间的距离与外管切口骨架1的内径相等;内骨架弯曲关节21包括一对平行分布在内骨架侧壁的内骨架柔性微梁22和连接在内骨架柔性微梁22两端的内骨架圆环管壁23,一对内骨架柔性微梁22之间的距离与内管切口骨架2的内径相等。外骨架圆环管壁13的上端面和下端面与连续体机器人整体的中心轴线垂直,内骨架圆环管壁23的上端面和下端面与连续体机器人整体的中心轴线垂直。
55.外骨架柔性微梁12的轴线与连续体机器人整体的轴线方向呈一个夹角β1;内骨架柔性微梁22的轴线与连续体机器人整体的轴线方向呈一个夹角β2;外骨架柔性微梁12与内骨架柔性微梁22的倾斜方向相反。各自柔性微梁的轴线与连续体整体的轴线方向呈一个夹角,相比于传统的微梁沿着整体轴线方向的设计来说,本发明设计增加了微梁的有效弯曲长度,因而在同样的驱动力下,可达到更大的弯曲角度;当弯曲到同样的角度时,微梁实际的应变会更小。
56.从切口型连续体机器人的顶端向外骨架基座15的方向开始数,奇数位的外骨架圆环管壁13上对称开设第一组外微孔141和第二组外微孔142,与奇数位的外骨架圆环管壁13
位置对应的奇数位内骨架圆环管壁23上对称开设第一组内微孔241和第二组内微孔242。每组微孔包括两个靠近且沿壁厚方向开设的通孔;第一组外微孔141和第一组内微孔241对准,第二组外微孔142与第二组内微孔242对准。
57.用绳索将第一组外微孔141和对应的第一组内微孔241连接,并打结形成第一绳环41,用绳索将第二组外微孔142和对应的第二组内微孔242连接,并打结形成第二绳环42,第一绳环41和第二绳环42均与外骨架圆环管壁13之间具有供驱动绳3穿过的空间,多个第一绳环41形成一个通道4,多个第二绳环42形成另一个通道4,一根驱动绳3穿过一个通道4后与切口型连续体机器人的顶端的第一绳环41固定,另一根驱动绳3穿过另一个通道4后与切口型连续体机器人的顶端的第二绳环42固定。
58.具体的,工作原理为:当连续体机器人的基座固定,用外部驱动力拉动驱动绳3时,驱动绳会在约束通道4内部进行滑动;由于该连续体机器人可以向左右两个方向分别弯曲,因此设有两条各自独立的驱动绳分布在弯曲微梁的两侧;当外力施加在驱动绳上时,受力的驱动绳相对于连续体机器人的长度缩短,连续体向受力一侧弯曲,而另一侧的驱动绳对应地处于松弛状态,长度被动伸长;对于每个骨架的弯曲关节来说,当驱动绳长度收缩,连接微梁的上下两端圆环管壁则在一侧靠紧,微梁产生弯曲,从而实现机器人整体的偏转。
59.实施例2
60.如图8至图10所示,与实施例1主要不同在于,外骨架圆环管壁13、内骨架圆环管壁的上端面和下端面与连续体机器人整体的中心轴线不垂直。具体结构如下:
61.一种基于交叉弯曲梁结构的切口型连续体机器人,包括外管切口骨架1,内管切口骨架2和驱动绳3,外管切口骨架1内套设有内管切口骨架2,外管切口骨架1的侧壁设有驱动绳通道4,驱动绳3的一端穿过驱动绳通道4后与切口型连续体机器人的顶端固连。外管切口骨架1和内管切口骨架2分别由一根镍钛管加工而成。
62.外管切口骨架1包括十九个外骨架弯曲关节11和一个外骨架基座15,内管切口骨架2包括十九个内骨架弯曲关节21和一个内骨架基座25;外骨架弯曲关节11和内骨架弯曲关节21的高度相等,外骨架基座15和内骨架基座25的轴向高度相等。外管切口骨架1和内管切口骨架2的壁厚相等,内管切口骨架2的外径小于外管切口骨架1的内径,两者呈间隙配合。以保证两者各自关节中柔性微梁的弯曲运动互不干涉。
63.外骨架弯曲关节11包括一对平行分布在外骨架侧壁的外骨架柔性微梁12和连接在外骨架柔性微梁12两端的外骨架圆环管壁13,一对外骨架柔性微梁12之间的距离与外管切口骨架1的内径相等;内骨架弯曲关节21包括一对平行分布在内骨架侧壁的内骨架柔性微梁22和连接在内骨架柔性微梁22两端的内骨架圆环管壁23,一对内骨架柔性微梁22之间的距离与内管切口骨架2的内径相等。
64.外骨架柔性微梁12的轴线与连续体机器人整体的轴线方向呈一个夹角β1为45
°
;内骨架柔性微梁22的轴线与连续体机器人整体的轴线方向呈一个夹角β2为45
°
;外骨架柔性微梁12与内骨架柔性微梁22的倾斜方向相反。各自柔性微梁的轴线与连续体整体的轴线方向呈一个夹角,相比于传统的微梁沿着整体轴线方向的设计来说,本发明设计增加了微梁的有效弯曲长度,因而在同样的驱动力下,可达到更大的弯曲角度;当弯曲到同样的角度时,微梁实际的应变会更小。
65.从切口型连续体机器人的顶端向外骨架基座15的方向开始数,奇数位的外骨架圆
环管壁13上对称开设第一组外微孔141和第二组外微孔142,与奇数位的外骨架圆环管壁13位置对应的奇数位内骨架圆环管壁23上对称开设第一组内微孔241和第二组内微孔242。每组微孔包括两个靠近且沿壁厚方向开设的通孔;第一组外微孔141和第一组内微孔241对准,第二组外微孔142与第二组内微孔242对准。
66.用绳索将第一组外微孔141和对应的第一组内微孔241连接,并打结形成第一绳环41,用绳索将第二组外微孔142和对应的第二组内微孔242连接,并打结形成第二绳环42,第一绳环41和第二绳环42均与外骨架圆环管壁13之间具有供驱动绳3穿过的空间,多个第一绳环41形成一个通道4,多个第二绳环42形成另一个通道4,一根驱动绳3穿过一个通道4后与切口型连续体机器人的顶端的第一绳环41固定,另一根驱动绳3穿过另一个通道4后与切口型连续体机器人的顶端的第二绳环42固定。
67.外骨架圆环管壁13的上端面和下端面与连续体机器人整体的中心轴线不垂直,内骨架圆环管壁23的上端面和下端面与连续体机器人整体的中心轴线不垂直。将柔性微梁两端的圆环管壁设置成两侧非对称的方式,从而让连续体机器人可实现两侧范围不一样的弯曲,以适应更为复杂的手术环境和体内腔道。
68.具体的,本实施例中,连续体机器人单个弯曲关节中,外管和内管壁上的微梁两端起始于同一个平面,但该平面并不与连续体骨架管的中心轴垂直;从图9可以看出,连接在柔性微梁两端的管壁呈梯形,意味着留下的切口空缺也呈梯形,区别于实施例1中的矩形。
69.具体的,该实施方式同样通过激光切割的方式选择性地留下管壁材料,形成内外切口骨架,每个包含切口的弯曲关节形状相同;但是每个切口处左右两侧留下切口间距不等,小间距的一侧在机器人弯曲到较小角度时便会发生上下管壁的接触,而大间距的一侧则能够容许更大的弯曲角度,使得机器人具有两侧非对称的弯曲范围,具有更高的灵活性。
70.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
71.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1