一种医院普外科人工智能伤口包扎装置的制作方法
1.本发明涉及医疗器械技术领域,尤其涉及一种医院普外科人工智能伤口包扎装置。
背景技术:
2.术后伤口包扎是对病员伤口进行有效保护,可以达到压迫止血、减少感染、保护伤口、减少疼痛,以及固定敷料和夹板等作用,目前在对手臂肢体进行包扎时通常需包扎人员使用双手将包扎带缠绕在手臂伤口上,包扎速度慢、效率低,同时对于一些手臂受伤而需自己进行包扎换药的病人,其很难自行进行包扎动作,需要额外的人员进行帮助才能完成包扎,较为不便。
3.公告号cn204092097u公开一种适用于外伤急救的伤口包扎装置,包括:绷带、压力阀、放气阀和充气气囊,所述压力阀、放气阀和充气气囊依次通过充气管与所述绷带相连接,且所述绷带上含有一透明窗口,该包扎装置不适合手臂受伤的人员进行使用,无法方便病员自行进行包扎换药的动作。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在伤员无法自行包扎的缺点,而提出的一种医院普外科人工智能伤口包扎装置。
5.为了实现上述目的,本发明采用了如下技术方案:设计一种医院普外科人工智能伤口包扎装置,包括底座、升降机构、放置筒、伤口清理机构、供水机构、包扎机构和控制箱,所述升降机构安装在底座的顶部,所述放置筒安装在升降机构的输出端,所述伤口清理机构安装在放置筒的顶端,所述供水机构、包扎机构分别安装在放置筒的两侧,所述控制箱固定安装在底座的外侧;所述升降机构包括第一电机、双向螺杆、螺纹块、第一连杆、第二连杆、支撑板和第一带轮,所述双向螺杆和第一带轮的数量均为两个,两个所述双向螺杆相互平行、且均转动安装在底座的内侧,两个所述第一带轮分别固定安装在相应的双向螺杆的端部,两个所述第一带轮之间通过皮带传动连接,所述第一电机固定安装在底座的外侧,所述第一电机的输出轴与相应的双向螺杆固定连接,所述螺纹块的数量为若干个,若干所述螺纹块螺纹安装在相应的双向螺杆的两端,所述第一连杆、第二连杆的数量均为若干个,若干所述第一连杆、第二连杆的一端分别铰接在相应的螺纹块的上下两端,若干所述第一连杆的另一端均与支撑板铰接,若干所述第二连杆的另一端均与底座铰接;所述伤口清理机构包括安装板、丝杆、螺纹座、第二电机和清理组件,所述安装板的数量为两个,两个所述安装板均固定安装在放置筒的顶部,所述丝杆转动安装在两个安装板之间,所述第二电机固定安装在安装板的外侧,所述第二电机的输出轴与丝杆固定连接,所述螺纹座螺纹安装在丝杆上,所述螺纹座贯穿放置筒的顶壁、且与放置筒滑动连接,所述清理组件安装在螺纹座的底端;
所述清理组件包括电动伸缩杆、安装座、第一转杆、海绵头、第二转杆、喷水头和第三电机,所述电动伸缩杆固定安装在螺纹座的底部,所述电动伸缩杆的输出端与安装座固定连接,所述第三电机固定安装在安装座的外侧,所述第一转杆和第二转杆同轴转动安装在安装座的内侧,所述海绵头固定安装在第一转杆的底部,所述喷水头固定安装在第二转杆的底部;所述供水机构包括蓄水筒、进水单向阀、出水单向阀、活塞、推拉杆和驱动组件,所述蓄水筒固定安装在放置筒的外侧,所述进水单向阀固定安装在蓄水筒的外侧,所述出水单向阀固定安装在蓄水筒的出水口,所述出水单向阀通过导管与喷水头接通,所述活塞滑动安装在蓄水筒的内侧,所述推拉杆的一端与活塞固定连接,所述推拉杆的另一端贯穿蓄水筒、且与蓄水筒滑动连接,所述驱动组件安装在推拉杆的端部;所述驱动组件包括活动板、第一弹簧、驱动轮、凸轮和第四电机,所述活动板与推拉杆的端部固定连接,所述第一弹簧套设在推拉杆上,所述驱动轮固定安装在活动板的内侧,所述第四电机固定安装在放置筒的外侧,所述第四电机的输出轴与凸轮固定连接,所述凸轮可与驱动轮接触配合;所述包扎机构包括收纳箱、纱布收卷筒、第一导向辊、第二导向辊、第二带轮、切割组件和第五电机,所述收纳箱固定安装在放置筒的外侧,所述纱布收卷筒转动安装在收纳箱内侧,所述第一导向辊、第二导向辊均转动安装在收纳箱内部,所述第二带轮与第一导向辊同轴固定连接,所述第五电机固定安装在收纳箱的外侧,所述第五电机的输出轴与第一导向辊固定连接,所述切割组件安装在收纳箱的顶部;所述切割组件包括刀座、刀具、驱动杆、第二弹簧、齿条、不完全齿轮和第三带轮,所述刀座固定安装在收纳箱的内部,所述刀具、滑动安装在收纳箱的内部,所述驱动杆贯穿收纳箱的顶壁、且与收纳箱滑动连接,所述驱动杆的底端与刀具固定连接,所述驱动杆的顶端与齿条固定连接,所述不完全齿轮转动安装在收纳箱的外侧,所述不完全齿轮可与齿条啮合,所述第三带轮与不完全齿轮同轴固定连接,所述第三带轮与第二带轮通过皮带转动连接,所述第二弹簧套设在驱动杆上。
6.优选的,所述螺纹块、第一连杆和第二连杆的数量均为四个,四个所述螺纹块、第一连杆和第二连杆两两相互对称。
7.优选的,所述放置筒内侧的底端固定安装有吸水垫,所述吸水垫上开设有若干透气孔,所述透气孔均匀分布在吸水垫上。
8.优选的,所述放置筒上开设有与螺纹座相匹配的滑槽,所述螺纹座可沿着滑槽滑动。
9.优选的,所述纱布收卷筒上收卷有相应的纱布,所述放置筒内壁上开设有相应的纱布导入槽。
10.优选的,所述第一导向辊与第二导向辊相切,所述第一导向辊与第二导向辊用于导出纱布。
11.优选的,所述刀座上开设有与刀具相匹配的刀口槽,所述刀具可与刀口槽配合。
12.优选的,所述第一转杆与第二转杆之间的夹角为45度,所述第一转杆与第二转杆之间可以同步转动。
13.优选的,所述放置筒内侧的顶壁上固定安装有摄像头,所述螺纹座上固定安装有
位移传感器,所述出水单向阀的出口端固定安装有流量传感器,所述收纳箱内部固定安装有速度传感器,所述摄像头、位移传感器、角度传感器、流量传感器和速度传感器均与控制箱信号连接。
14.优选的,所述控制箱内部固定安装有相应的控制面板,所述控制面板包括处理器、与处理器电性连接的图像采集模块、信号转换器、信号接收模块、储存模块、伤口识别模块和执行模块,所述信号转换器包括微型芯片、与微型芯片电性连接的信号放大模块、信号转换模块和信号输出模块。
15.本发明提出的一种医院普外科人工智能伤口包扎装置,有益效果在于:1、通过控制第一电机使得相应的双向螺杆转动,通过两个第一带轮的传动,使得两个双向螺杆同向转动,从而使得两侧的螺纹块相向或者相背移动,这就使得第一连杆、第二连杆发生转动,也就使得支撑板能够上下移动,进而实现了支撑板的高度调节。
16.2、通过第二电机使得丝杆转动,从而使得螺纹座可以在放置筒内移动,也就可以带着喷水头和海绵头水平移动调整位置,这样方便喷水头和海绵头能够根据伤口的位置移动;通过控制第三电机使得第一转杆与第二转杆转动,这样可以转换喷水头和海绵头的位置,使得喷水头和海绵头只能一个对伤口进行处理;通过控制电动伸缩杆使得海绵头与伤口接触,从而实现对伤口进行清理。
17.3、通过第四电机驱动凸轮转动,当凸轮与驱动轮接触配合时,可以推动活动板和推拉杆移动,从而使得活塞移动将蓄水筒内的水挤出,进而通过出水单向阀导入喷水头内进行喷水;当凸轮与驱动轮脱离后,在第一弹簧的作用下活塞往回移动吸入水;如此循环可以实现对喷水头持续供水。
18.4、通过第五电机使得第一导向辊转动,从而使得纱布收卷筒上纱布被导入放置筒内进行包扎,第一导向辊转动的同时,在第三带轮与第二带轮的传动下,不完全齿轮回发生转动,当不完全齿轮与齿条啮合时,齿条回带动驱动杆向下移动,从而使得刀具与刀座配合,也就可以将纱布切断,进而可以对伤口进行包扎;整个过程完全实现自动化,伤员可以自行进行包扎,大大减轻医院的医护人员的压力。
附图说明
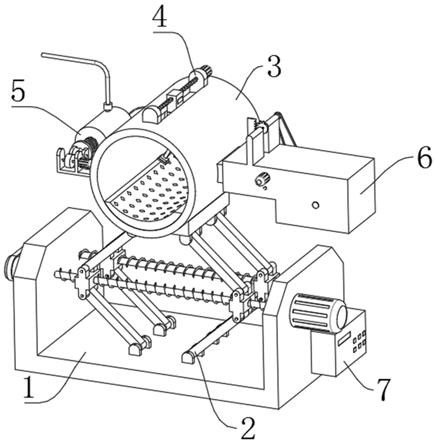
19.图1为本发明提出的一种医院普外科人工智能伤口包扎装置的结构示意图一;图2为本发明提出的一种医院普外科人工智能伤口包扎装置的结构示意图二;图3为本发明提出的一种医院普外科人工智能伤口包扎装置的升降机构的结构示意图;图4为本发明提出的一种医院普外科人工智能伤口包扎装置的部分结构示意图;图5为本发明提出的一种医院普外科人工智能伤口包扎装置的伤口清理机构的结构示意图;图6为本发明提出的一种医院普外科人工智能伤口包扎装置的清理组件的结构示意图;图7为本发明提出的一种医院普外科人工智能伤口包扎装置的供水机构的结构示意图;图8为本发明提出的一种医院普外科人工智能伤口包扎装置的驱动组件的结构示
意图;图9为本发明提出的一种医院普外科人工智能伤口包扎装置的包扎机构的结构示意图;图10为本发明提出的一种医院普外科人工智能伤口包扎装置的切割组件的结构示意图;图11为本发明提出的一种医院普外科人工智能伤口包扎装置的系统框图。
20.图中:底座1、升降机构2、第一电机21、双向螺杆22、螺纹块23、第一连杆24、第二连杆25、支撑板26、第一带轮27、放置筒3、摄像头31、吸水垫32、透气孔33、伤口清理机构4、安装板41、丝杆42、螺纹座43、第二电机44、位移传感器45、清理组件46、电动伸缩杆461、安装座462、第一转杆463、海绵头464、第二转杆465、喷水头466、第三电机467、供水机构5、蓄水筒51、进水单向阀52、出水单向阀53、活塞54、推拉杆55、驱动组件56、活动板561、第一弹簧562、驱动轮563、凸轮564、第四电机565、包扎机构6、收纳箱61、纱布收卷筒62、第一导向辊63、第二导向辊64、第二带轮65、切割组件66、刀座661、刀具662、驱动杆663、第二弹簧664、齿条665、不完全齿轮666、第三带轮667、第五电机67、控制箱7。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
22.实施例1:参照图1
‑
10,一种医院普外科人工智能伤口包扎装置,包括底座1、升降机构2、放置筒3、伤口清理机构4、供水机构5、包扎机构6和控制箱7,升降机构2安装在底座1的顶部,放置筒3安装在升降机构2的输出端,放置筒3内侧的底端固定安装有吸水垫32,吸水垫32上开设有若干透气孔33,透气孔33均匀分布在吸水垫32上;伤口清理机构4安装在放置筒3的顶端,供水机构5、包扎机构6分别安装在放置筒3的两侧,控制箱7固定安装在底座1的外侧;升降机构2包括第一电机21、双向螺杆22、螺纹块23、第一连杆24、第二连杆25、支撑板26和第一带轮27,双向螺杆22和第一带轮27的数量均为两个,两个双向螺杆22相互平行、且均转动安装在底座1的内侧,两个第一带轮27分别固定安装在相应的双向螺杆22的端部,两个第一带轮27之间通过皮带传动连接,第一电机21固定安装在底座1的外侧,第一电机21的输出轴与相应的双向螺杆22固定连接,螺纹块23的数量为若干个,若干螺纹块23螺纹安装在相应的双向螺杆22的两端,第一连杆24、第二连杆25的数量均为若干个,若干第一连杆24、第二连杆25的一端分别铰接在相应的螺纹块23的上下两端,若干第一连杆24的另一端均与支撑板26铰接,若干第二连杆25的另一端均与底座1铰接;伤口清理机构4包括安装板41、丝杆42、螺纹座43、第二电机44和清理组件46,安装板41的数量为两个,两个安装板41均固定安装在放置筒3的顶部,丝杆42转动安装在两个安装板41之间,第二电机44固定安装在安装板41的外侧,第二电机44的输出轴与丝杆42固定连接,螺纹座43螺纹安装在丝杆42上,螺纹座43贯穿放置筒3的顶壁、且与放置筒3滑动连接,放置筒3上开设有与螺纹座43相匹配的滑槽,螺纹座43可沿着滑槽滑动;清理组件46安装在螺纹座43的底端;清理组件46包括电动伸缩杆461、安装座462、第一转杆463、海绵头464、第二转杆
465、喷水头466和第三电机467,电动伸缩杆461固定安装在螺纹座43的底部,电动伸缩杆461的输出端与安装座462固定连接,第三电机467固定安装在安装座462的外侧,第一转杆463和第二转杆465同轴转动安装在安装座462的内侧,第一转杆463与第二转杆465之间的夹角为45度,第一转杆463与第二转杆465之间可以同步转动;海绵头464固定安装在第一转杆463的底部,喷水头466固定安装在第二转杆465的底部;供水机构5包括蓄水筒51、进水单向阀52、出水单向阀53、活塞54、推拉杆55和驱动组件56,蓄水筒51固定安装在放置筒3的外侧,进水单向阀52固定安装在蓄水筒51的外侧,出水单向阀53固定安装在蓄水筒51的出水口,出水单向阀53通过导管与喷水头466接通,活塞54滑动安装在蓄水筒51的内侧,推拉杆55的一端与活塞54固定连接,推拉杆55的另一端贯穿蓄水筒51、且与蓄水筒51滑动连接,驱动组件56安装在推拉杆55的端部;驱动组件56包括活动板561、第一弹簧562、驱动轮563、凸轮564和第四电机565,活动板561与推拉杆55的端部固定连接,第一弹簧562套设在推拉杆55上,驱动轮563固定安装在活动板561的内侧,第四电机565固定安装在放置筒3的外侧,第四电机565的输出轴与凸轮564固定连接,凸轮564可与驱动轮563接触配合;包扎机构6包括收纳箱61、纱布收卷筒62、第一导向辊63、第二导向辊64、第二带轮65、切割组件66和第五电机67,收纳箱61固定安装在放置筒3的外侧,纱布收卷筒62转动安装在收纳箱61内侧,纱布收卷筒62上收卷有相应的纱布,放置筒3内壁上开设有相应的纱布导入槽;第一导向辊63、第二导向辊64均转动安装在收纳箱61内部,第一导向辊63与第二导向辊64相切,第一导向辊63与第二导向辊64用于导出纱布;第二带轮65与第一导向辊63同轴固定连接,第五电机67固定安装在收纳箱61的外侧,第五电机67的输出轴与第一导向辊63固定连接,切割组件66安装在收纳箱61的顶部;切割组件66包括刀座661、刀具662、驱动杆663、第二弹簧664、齿条665、不完全齿轮666和第三带轮667,刀座661固定安装在收纳箱61的内部,刀具662、滑动安装在收纳箱61的内部,刀座661上开设有与刀具662相匹配的刀口槽,刀具662可与刀口槽配合;驱动杆663贯穿收纳箱61的顶壁、且与收纳箱61滑动连接,驱动杆663的底端与刀具662固定连接,驱动杆663的顶端与齿条665固定连接,不完全齿轮666转动安装在收纳箱61的外侧,不完全齿轮666可与齿条665啮合,第三带轮667与不完全齿轮666同轴固定连接,第三带轮667与第二带轮65通过皮带转动连接,第二弹簧664套设在驱动杆663上。
23.工作原理:通过控制第一电机21使得相应的双向螺杆22转动,通过两个第一带轮27的传动,使得两个双向螺杆22同向转动,从而使得两侧的螺纹块23相向或者相背移动,这就使得第一连杆24、第二连杆25发生转动,也就使得支撑板26能够上下移动,进而实现了支撑板26的高度调节;通过第二电机44使得丝杆42转动,从而使得螺纹座43可以在放置筒3内移动,也就可以带着喷水头466和海绵头464水平移动调整位置,这样方便喷水头466和海绵头464能够根据伤口的位置移动;通过控制第三电机467使得第一转杆463与第二转杆465转动,这样可以转换喷水头466和海绵头464的位置,使得喷水头466和海绵头464只能一个对伤口进行处理;通过控制电动伸缩杆461使得海绵头464与伤口接触,从而实现对伤口进行清理;通过第四电机565驱动凸轮564转动,当凸轮564与驱动轮563接触配合时,可以推动活动板561和推拉杆55移动,从而使得活塞54移动将蓄水筒51内的水挤出,进而通过出水
单向阀53导入喷水头466内进行喷水;当凸轮564与驱动轮563脱离后,在第一弹簧562的作用下活塞54往回移动吸入水;如此循环可以实现对喷水头466持续供水;通过第五电机67使得第一导向辊63转动,从而使得纱布收卷筒62上纱布被导入放置筒3内进行包扎,第一导向辊63转动的同时,在第三带轮667与第二带轮65的传动下,不完全齿轮666回发生转动,当不完全齿轮666与齿条665啮合时,齿条665回带动驱动杆663向下移动,从而使得刀具662与刀座661配合,也就可以将纱布切断,进而可以对伤口进行包扎;整个过程完全实现自动化,伤员可以自行进行包扎,大大减轻医院的医护人员的压力。
24.实施例2:参照图1
‑
11,作为本发明的另一优选实施例,与实施例1的区别在于,放置筒3内侧的顶壁上固定安装有摄像头31,螺纹座43上固定安装有位移传感器45,出水单向阀53的出口端固定安装有流量传感器,收纳箱61内部固定安装有速度传感器,摄像头31、位移传感器45、流量传感器和速度传感器均与控制箱7信号连接;控制箱7内部固定安装有相应的控制面板,控制面板包括处理器、与处理器电性连接的图像采集模块、信号转换器、信号接收模块、储存模块、伤口识别模块和执行模块,信号转换器包括微型芯片、与微型芯片电性连接的信号放大模块、信号转换模块和信号输出模块。
25.工作原理:伤员将受伤部位放入放置筒3内,摄像头31可以拍摄到受伤部位,然后将图像传输到控制箱7进行处理,伤口识别模块可以识别到伤口具体位置,位移传感器45可以检测螺纹座43移动的位移;流量传感器可以检测出水单向阀53的出水量;速度传感器可以检测纱布的导出速度;然后根据设置数据控制相应的驱动源进行相应的控制。
26.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1