一种可膨胀椎间融合器试模的制作方法
1.本发明涉及椎间手术器械领域,尤其是涉及一种可膨胀椎间融合器试模。
背景技术:
2.椎间手术是常见的外科手术,用于治疗腰椎疾病,例如椎间盘疾病、腰椎不稳等,这类疾病多见于中老年人,但随着社会的久坐问题越发严重,腰椎疾病有年轻化的趋势,因此治疗腰椎疾病变得尤为关键。
3.脊柱融合术是椎间手术的一种,脊柱融合术需要用到椎间融合器,手术时,椎间融合器会被植入于脊柱的椎体之间,从而保持两椎体之间的间隔,实现后续康复。
4.相关的椎间融合器在植入脊柱的过程中,椎间融合器往往需要通过经验来选择尺寸,这常导致椎间融合器的尺寸与两椎体之间的间隔不合适,需要取出不合适的椎间融合器而更换新的椎间融合器,影响手术效率和效果。
技术实现要素:
5.为了提高融合器植入时尺寸与两椎体之间间隔的适配程度,本技术提供一种可膨胀椎间融合器试模。
6.本技术提供的一种可膨胀椎间融合器试模采用如下的技术方案:一种可膨胀椎间融合器试模,包括试模本体和固定管,所述固定管的一端设有调节台,所述固定管内穿设有调节杆,所述调节杆穿设且螺纹连接于所述调节台,所述试模本体包括两个试模块,所述试模块滑动连接于所述调节台,两个所述试模块相靠近的一面设有与所述调节杆抵接的导向面,两个所述导向面对称设置且自靠近调节台的一端至远离调节台的一端倾斜设置。
7.通过采用上述技术方案,在放入融合器之前,可先将试模本体放入椎体之间,转动调节杆,可以使调节杆移动,利用倾斜设置的导向面,调节杆可以带动两个试模块往相互远离的方向移动,实现试模本体的撑开,直至试模本体与椎体卡住,手术人员可根据此时试模本体撑开后的宽度来选择合适尺寸的融合器,从而提高融合器尺寸与两椎体之间间隔的适配程度。
8.可选的,所述调节杆的侧壁设有刻度,所述刻度显示两个所述试模块相背离一面的距离。
9.通过采用上述技术方案,手术人员观察刻度可以清楚的知道试模本体的宽度,从而方便的选择相应的融合器。
10.可选的,所述调节杆的端部设有与所述导向面抵接的调节块,所述调节块呈圆台状,所述导向面配合所述调节块的侧壁形状呈内弧状。
11.通过采用上述技术方案,调节块与导向面的接触面积大且稳定性高,便于带动试模块移动。
12.可选的,两个所述导向面的间距自靠近调节台的一端至远离调节台的一端逐渐减
小。
13.通过采用上述技术方案,当调节块远离调节台时,可以带动两个试模块往相互远离的方向移动,从而实现试模的撑开。
14.可选的,两个所述试模块之间连接有弹性件。
15.通过采用上述技术方案,弹性件和调节块相配合,限制试模块滑动,保持两个试模块的相对位置的稳定,从而保持试模本体整体宽度的稳定,提高试模本体试用时的稳定性。
16.可选的,所述调节块开设有滑移槽,所述调节杆滑动连接于所述滑移槽,所述调节杆穿设有控制杆,所述控制杆与所述调节块固定,所述控制杆与所述调节杆之间设有用于锁紧两者位置的锁紧件。
17.通过采用上述技术方案,在试模本体撑开到最大程度后,通过控制杆拉动调节块,使调节块靠近调节台,然后试模本体在弹性件的作用下收缩,从而便于取出试模本体,同时无需转动调节杆,保持刻度不变,从而可以在取出试模本体后再记录试模本体整体宽度,操作更加便利。
18.可选的,所述锁紧件包括与所述控制杆连接的锁紧套,所述调节杆远离所述调节块的端面沿长度方向开设有锁紧槽,所述锁紧套螺纹连接于所述锁紧槽。
19.通过采用上述技术方案,锁紧套固定控制杆的位置,另外通过旋转锁紧套,可以带动控制杆移动,从而控制调节块移动。
20.可选的,所述调节台开设有移动槽,所述试模块设有滑动连接于所述移动槽的滑块。
21.通过采用上述技术方案,实现试模块与调节台的滑动连接,保持试模块位置的相对稳定。
22.可选的,所述调节杆的外壁设有连接块,所述连接块套设且卡接有转动块,所述转动块设有转动把手。
23.通过采用上述技术方案,转动块和转动把手便于转动调节杆,且连接块与转动块卡接,使得当固定管与椎间孔镜的工作通道倒装时,可以将转动块和转动把手拆卸,便于实现倒装。
24.综上所述,本技术具有以下有益效果:1.在放入融合器之前,可先将试模本体放入椎体之间,转动调节杆,可以使调节杆移动,利用倾斜设置的导向面,调节杆可以带动两个试模块往相互远离的方向移动,实现试模本体的撑开,直至试模本体与椎体卡住,手术人员可根据此时试模本体撑开后的宽度来选择合适尺寸的融合器,从而提高融合器尺寸与两椎体之间间隔的适配程度;2.试模本体撑开到最大程度后,可以在不转动调节杆的前提下收缩试模本体,从而保持刻度不变,进而在取出试模本体后再记录试模本体整体宽度。
附图说明
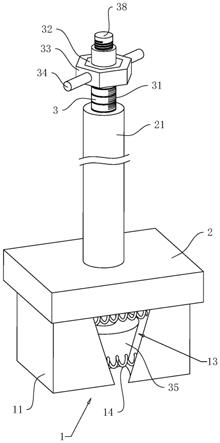
25.图1是本技术实施例的立体结构图。
26.图2是本技术实施例的剖面结构图。
27.图3是本技术实施例与椎间孔镜倒装后的立体结构图。
28.附图标记说明:
1、试模本体;11、试模块;12、滑块;13、导向面;14、弹簧;2、调节台;21、固定管;22、移动槽;3、调节杆;31、刻度;32、连接块;33、转动块;34、转动把手;35、调节块;36、滑移槽;37、控制杆;38、锁紧套;39、锁紧槽;4、椎间孔镜。
具体实施方式
29.以下结合附图1
‑
3对本技术作进一步详细说明。
30.本技术实施例公开一种可膨胀椎间融合器试模。如图1所示,一种可膨胀椎间融合器试模包括试模本体1和固定管21,固定管21的一端固定有调节台2,试模本体1与调节台2连接。
31.试模本体1的宽度可调节,在植入融合器之前,先通过固定管21将试模本体1伸入椎体之间,调节试模本体1的宽度,直至试模本体1卡在椎体之间,此时试模本体1的宽度可供手术人员参考,以选择尺寸合适的融合器,从而提高融合器尺寸与两椎体之间间隔的适配程度。
32.如图1和图2所示,调节台2背离固定管21的一面开设有移动槽22,移动槽22设置有两个且分别位于调节台2的两端,移动槽22沿调节台2的长度方向延伸,试模本体1包括两个试模块11,试模块11靠近调节台2的一端固定有滑块12,滑块12滑动连接于移动槽22,滑块12和移动槽22的横截面均呈锲形,从而实现试模块11与调节台2的滑动连接,在调节台2上两个试模块11可实现相互靠近或者相互远离的操作。
33.两个试模块11相靠近的一面设有导向面13,两个导向面13对称设置,导向面13呈内弧状,即两个导向面13的弧形开口相对设置,且两个导向面13的间距自靠近调节台2的一端至远离调节台2的一端逐渐减小,使得导向面13与调节台2之间倾斜设置;两个试模块11的导向面13之间连接有弹性件,弹性件具体为弹簧14,弹簧14在试模块11的两侧分别设置有一组,且每组弹簧14沿试模块11远离调节台2的延伸方向设置有两个,弹簧14起到拉紧两个试模块11的作用,保持两个试模块11具有相互靠近的趋势。
34.固定管21呈圆柱形中空结构,固定管21内穿设有调节杆3,调节杆3沿固定管21的长度方向延伸,且调节杆3外壁与固定管21的内壁贴合,调节杆3穿设且螺纹连接于调节台2,调节杆3穿出调节台2的一端设有调节块35,调节块35位于两个试模块11之间;调节块35呈圆台状,调节块35靠近调节台2的端面面积大于调节块35远离调节台2的端面面积,调节块35的侧壁抵接于导向面13。
35.转动调节杆3,通过调节杆3与调节台2的螺纹配合实现调节块35的移动,当调节块35朝远离调节台2的方向移动时,调节块35可以带动两个试模块11往相互远离的方向移动,从而撑开试模本体1,实现试模本体1的宽度可调节;导向面13的内弧状设置以及调节块35的圆台状设置,使得调节块35与试模块11的接触面积更大,从而更加稳定的调节试模本体1的宽度,以提高试模本体1测试椎体间隔时的稳定性。
36.如图1所示,调节杆3的外壁蚀刻有刻度31,部分刻度31伸出固定管21的端部,在转动调节杆3、移动两个试模块11的同时,刻度31的位置会随调节杆3的移动而改变,即刻度31的位置会随两个试模块11的移动而改变,与固定管21的端面平齐的刻度线显示两个试模块11相背离一面的距离,从而可以根据刻度31得知试模本体1的宽度,并以此得知椎体间隔,以选择合适尺寸的融合器。
37.调节杆3的外壁套设且固定有连接块32,连接块32位于刻度31远离调节台2的一端,连接块32的横截面呈正六边形,连接块32套设有转动块33,转动块33为中空结构且横截面呈正六边形,转动块33与连接块32卡接,转动块33的侧壁对称固定有转动把手34,手术人员可通过旋转转动把手34,带动调节杆3转动,方便施力;另外,如图3所示,转动块33与连接块32可拆卸式连接,可供本技术的可膨胀椎间融合器试模与椎间孔镜4倒装,具体为将固定管21从椎间孔镜4的工作通道的一端伸入、另一端伸出,然后连接转动块33与连接块32,此时调节台2和试模本体1位于椎间孔镜4外,手术人员在放入试模本体1时可以通过椎间孔镜4观察试模本体1的具体位置,便于放入试模本体1。
38.如图2所示,调节块35靠近调节台2的端面开设有滑移槽36,滑移槽36在调节块35的两端面之间延伸,调节杆3滑动连接于滑移槽36,调节杆3沿长度方向穿设且滑动连接有控制杆37,控制杆37与滑移槽36槽底固定连接,从而使控制杆37与调节块35固定连接,控制杆37可带动调节块35移动。
39.控制杆37与调节杆3之间设有锁紧件,在本实施例中,锁紧件为锁紧套38,锁紧套38为一端开口的中空结构,调节杆3远离调节块35的端面开设有锁紧槽39,锁紧槽39沿调节杆3的长度方向延伸,控制杆37穿设于锁紧槽39且与锁紧套38固定连接,锁紧套38设有外螺纹,锁紧套38与锁紧槽39螺纹连接,使得旋转锁紧套38可以带动调节块35移动。
40.如图1和图2所示,在将试模本体1放入椎体之间之前,先旋转锁紧套38,使得调节块35相对于调节杆3移动,调节杆3与滑移槽36的槽底之间留有间距;在撑开试模本体1后,反向旋转锁紧套38,使调节块35往靠近调节台2的方向移动,在弹簧14的回复弹力下,两个试模块11会往相互靠近的方向移动,从而缩小试模本体1的宽度以方便将试模本体1拔出,提高使用试模本体1的效率,同时调节杆3无需转动,从而使刻度线保持与试模本体1撑开时的刻度31线一致,在取出试模本体1后再记录试模本体1整体宽度,操作更加便利。
41.本技术实施例一种可膨胀椎间融合器试模的实施原理为:在植入融合器之前,先将试模本体1放入椎体之间,旋转转动把手34,带动调节杆3转动,带动调节块35向背离调节台2的方向移动,利用调节块35与导向面13的配合,使两个试模块11相互远离,实现试模本体1的撑开,以使试模本体1能够卡在椎体之间,同时椎体间隔可以显示在刻度31上;试模本体1卡在椎体之间、且撑开到最大程度后,旋转锁紧套38,带动调节块35向靠近调节台2的方向移动,在弹簧14的收缩下,使两个试模块11相互靠近,从而在调节杆3保持不转动的同时带动试模本体1收缩,使得试模本体1更容易被取出,且保持刻度31不变,在取出试模本体1后再读刻度31,方便获得椎体间隔的数据,从而选择合适尺寸的融合器进行植入。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1