一种主操作手夹持结构的制作方法
1.本发明涉及手术机器人领域,尤其涉及一种主操作手夹持结构。
背景技术:
2.随着机器人科学技术与医疗技术的发展,机器人辅助系统在微创手术中的应用更加广泛。机器人辅助系统多为主从式遥控操作结构,医生通过远程通信和计算机控制,操作主操作手控制从动手术器械的运动从而进行手术。
3.主操作手作为整个系统的输入端,扮演着极其重要的角色。而开合机构及其旋转机构作为主操作手的重要组件,通过人手开合及旋转等操作,控制从动手术器械的运动来完成手术过程中的剪切、缝合、打结等操作。
4.现有技术中,一种夹持结构的形式是通过两个啮合的齿轮带动拨片,拨片上装有霍尔传感器,当拨片的位置到达传感器读头的位置,传感器能感应到霍尔传感器的位置,说明夹持动作到位,当泄力的时候,通过弹簧又复位到夹持结构张开的状态,此结构优点是结构简单,只有开合两个状态,缺点是霍尔传感器只能检测开合两个状态,却无法确定夹持结构的其他位置状态,控制不精确,使用过程中不能确定夹持的松紧及状态。
5.另外一种夹持结构的形式是采用平行四边形连杆结构,由两个夹持件的旋转转换成四边形顶点的伸缩连杆直线运动。当往下按压夹持件到位的时候,伸缩连杆的末端到达霍尔传感器的感应区域,说明夹持动作到位;当泄力的时候,通过弹簧使夹持件复位到张开的状态,伸缩连杆的末端也同时复位,由此检测夹持件的开合状态。但是该结构有以下几个缺点:1、由于四边形连杆传动杆件之间有间隙,主从精度无法保证;2、同样的霍尔传感器只能检测到开合两个状态,无法缺点夹持结构的其他位置状态,控制不精确,使用过程中无法确定夹持的松紧及状态;3、四边形连杆结构比较占用空间,导致整个夹持结构的体积和重量都比较大,并且也没有空间来放编码器。
技术实现要素:
6.发明目的:本发明针对上述不足,提供了一种通过钢丝绳传动且带力反馈的主操作手夹持结构。
7.技术方案:
8.一种主操作手夹持结构,包括:
9.支撑座;
10.夹持件,相对所述支撑座开合;
11.传动组件,包括钢丝绳及采集器,所述夹持件通过钢丝绳将其开合运动同步传动至采集器,所述采集器据此得到所述夹持件的开合角度。
12.所述采集器为电机,安装在支撑座上,其电机轴通过钢丝绳与所述夹持件配合连接;所述电机上设置有用于采集所述电机轴的转动角度的编码器。
13.所述夹持件为2个,其相对设置在所述支撑座两侧;在所述夹持件的近端均设置有
外径相等的钢丝轮,所述钢丝轮转动安装在所述支撑座近端处;所述钢丝绳一端绕设在所述电机轴上,其另一端依次绕设在两个所述夹持件的钢丝轮上且所述钢丝绳在两个钢丝轮上绕设的方向相反。
14.在所述支撑座近端还转动安装有传动钢丝轮;所述钢丝绳一端绕设在所述电机轴上,其另一端依次在所述传动钢丝轮和两个夹持件的钢丝轮上绕设之后,再在所述传动钢丝轮绕设并固定在其上。
15.在所述传动钢丝轮上及所述夹持件的钢丝轮上均开设有用于绕设所述钢丝绳的螺纹;同样,在所述电机轴上也开设有用于绕设所述钢丝绳的螺纹。
16.在所述传动钢丝轮上设置有磁环,在所述支撑座上与所述磁环相对应位置处设置有编码器读头;所述编码器读头读取所述磁环的旋转角度,进而得到所述传动钢丝轮的旋转角度。
17.在所述传动钢丝轮上还设置用于所述传动钢丝轮复位的扭转弹簧。
18.在所述电机轴与所述传动钢丝轮之间转动安装有用于张紧所述钢丝绳的钢丝导轮。
19.所述钢丝导轮的数量为至少一个,分别设置在不同位置上,用于实现不同情况下张紧所述钢丝绳的需求。
20.在两个所述夹持件之间设置有用于提供两个所述夹持件的向外打开的力的复位弹簧。
21.所述夹持件与所述钢丝轮为一体设计。
22.所述支撑座为中空壳体,其左右两侧开口,用于安装夹持件。
23.在所述中空壳体的上下侧面中至少一侧面上设置有用于断开或打开主手和从手的连接的拨动开关。
24.在所述夹持件外端面上设置有指套,用于穿过医生的手指进行操作。
25.本发明与现有技术相比,具有如下有益效果:
26.1、本发明的整个传动过程都是钢丝绳传动,且钢丝绳的绕线方式是8字绕线,同步性好、传动无间隙且不占用空间,减轻了体积及质量。
27.2、本发明通过电机上的编码器采集得到夹持件的开合角度,同时在夹持件旋转方向通过磁环和编码器读头获取夹持结构相应位置状态,以弥补电机上编码器采集到夹持件的开合角度的误差,从而形成高精密的闭环控制,提高了传动位置获取的精度。
28.3、本发明在夹持过程中通过对电机的电流控制,将手术时感应人体组织的阻力反馈给医生,形成力反馈系统,使用过程更加直观。
29.4、钢丝传动带动传动钢丝轮运动,并且传动钢丝轮与电机轴连接,将夹持狭小空间布局的方案外引至传动钢丝轮的较大空间范围,增加布局操作及装配便利性的空间。
附图说明
30.图1为主操作手整体图。
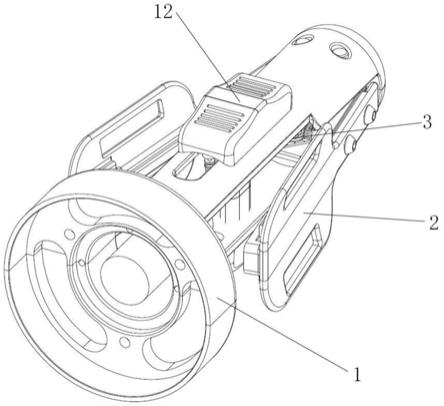
31.图2为本发明夹持结构的整体图。
32.图3为本发明夹持结构部件爆炸图。
33.图4为的钢丝绕线方式示意图。
34.图5为本发明拨片的细节图。
35.图6为本发明钢丝轮及扭转弹簧的整体结构图。
36.其中,a为夹持结构,1为外壳,11为腰型孔,12为拨动开关;2为夹持组件,21为拨片,22为钢丝轮,23为复位弹簧;3为传动组件,31为钢丝绳,32为钢丝导轮,33为传动钢丝轮,34为扭转弹簧,35为磁环;4为电机,5为编码器读头。
具体实施方式
37.下面结合附图和具体实施例,进一步阐明本发明。
38.图1为主操作手整体图,如图1所示,本发明的主操作手夹持结构a设置在主操作手的最末端处,与之成一定比例映射关系的是从动手术器械,如持针钳,通过控制器实现主操作手与从动手术器械之间的实时同步运动;持针钳上的两个持针钳片分别与本发明夹持结构的两个拨片21相互对应,当本发明夹持结构的两个拨片21做往复开合运动的过程中,持针钳上的两个持针钳片分别对应地也会以一定比例做绕定轴的往复开合运动。
39.如图2、3所示,本发明的夹持结构a包括外壳1、夹持组件2、传动组件3以及力反馈组件,其中,外壳1的左右两侧开口,用于安装夹持组件2;
40.夹持组件2包括夹持件、钢丝轮22及复位弹簧23,其中夹持件有两个,具体为拨片21,且两个拨片21相对布置在外壳1两侧的开口处;如图5所示,在两个拨片21的近端一体化固定有钢丝轮22,且二者的钢丝轮22外径相等;在外壳1内位于近端两侧位置处均设置有轮轴,两个拨片21近端处的钢丝轮22分别转动安装在外壳1内位于近端两侧的轮轴上,通过如此设计,可以使得两个拨片在外壳1两侧进行往复开合运动。复位弹簧5的两端分别固定在两个拨片21的中部位置之间,该复位弹簧5在自然状态下使得两个拨片21处于打开状态,从而提供两个拨片21向外打开的力,使两个拨片21可以自动打开。
41.传动组件3包括钢丝绳31、钢丝导轮32以及传动钢丝轮33,在外壳1内位于近端中间位置处设置有传动轮轴,传动钢丝轮33转动安装在传动轮轴上,且在传动钢丝轮33一端面上固定有磁环35,如图6所示;在外壳1上与传动轮轴相对应的位置处设置有编码器读头5,该编码器读头5通过读取传动钢丝轮33端面上的磁环18的旋转角度,进而获取得到传动钢丝轮33的旋转角度。在传动钢丝轮33上还设置有扭转弹簧34,用于提供实现传动钢丝轮33复位的扭矩。
42.在本发明中,如图5所示,拨片21与钢丝轮22之间可以设计成一体结构,也可以通过螺钉固定连接。通过一体结构设计,可以节省空间用于放置电机4进行力反馈。
43.在本发明中,在两个拨片21外侧面上均设置有指套,用于穿过医生的手指进行操作。
44.在外壳1内位于远端处设置有电机4,其电机轴面向传动钢丝轮33;在电机4上设置有编码器,用于采集电机轴的转动角度,计算得到两个拨片21的转动角度,进而得到两个拨片21的位置。
45.在外壳1内位于电机4与传动钢丝轮33之间设置有导轮轮轴,钢丝导轮32转动设置在导轮轮轴上,用于张紧钢丝绳31;钢丝绳31的一端固定在电机轴上,且在电机轴上绕设若干周,钢丝绳31的另一端首先在钢丝导轮32上绕设半圈,然后依次在传动钢丝轮33、两个拨片21的钢丝轮22上绕设一圈后,再在传动钢丝轮33上绕设一圈并固定在传动钢丝轮33上,
其中,钢丝绳31在两个拨片21的钢丝轮22上绕设的方向相反,如图4所示。
46.在本发明中,在传动钢丝轮33及两个拨片21的钢丝轮22上均开设有用于绕设钢丝绳31的螺纹。同样,在电机轴上也开设有用于绕设钢丝绳31的螺纹。
47.在本发明中,钢丝绳31另一端首先在钢丝导轮32上绕设半圈,然后依次在传动钢丝轮33上顺时针绕设一圈、在位于传动钢丝轮33右侧的钢丝轮22上顺时针绕设一圈、在位于传动钢丝轮33左侧的钢丝轮22上逆时针绕设一圈之后,再在传动钢丝轮33上顺时针绕设一圈并固定在传动钢丝轮33上。
48.在本发明中,导轮轮轴的位置不在电机轴与传动钢丝轮33轮轴的连线上。
49.在本发明中,导轮轮轴可以设计为多个,分别在不同位置上,用于实现不同情况下张紧钢丝绳31的需求。
50.本发明中,如图6所示,传动钢丝轮33、扭转弹簧34及35可以一体化设计,在节省空间的同时,可完成两个拨片21复位的功能;且在本发明中,通过扭转弹簧34实现两个拨片复位的功能,同时,设置了复位弹簧23,进一步保证两个拨片的复位。
51.如图2、3所示,本发明的外壳1上下侧面中至少一侧面上均设置有腰型孔11,其内活动设置有拨动开关12,该拨动开关12与主操作手的io控制板连接,io控制板与控制器连接;医生通过拨动拨动开关12,从而将拨动信号通过io控制板发送至控制器,并由控制器控制从动手术器械打开或者断开与主操作手之间的同步运动。
52.在本发明中,外壳1可以设计为通过螺钉配合安装的上壳和下壳。
53.在本发明中,在拨动开关12内设置有复位弹簧,在医生松开拨动开关12后,拨动开关12在复位弹簧的作用下复位,通过所述io控制板发送至控制器,从而恢复从动手术器械与主操作手之间的同步运动。
54.在从动手术器械内设置有传感器,用于进行手术时感应人体组织的阻力,并发送至控制器,控制器根据弹簧弹力计算得到反馈力对应的电机电流发送至与电机连接的驱动器,驱动器据此控制电机产生相应力矩。
55.如图2、3所示,当医生通过手指挤压两个拨片21时,由于钢丝绳31的绕法,两个拨片21分别会带着对应钢丝轮22做方向相反的镜像同步运动,进而通过钢丝绳31带着传动钢丝轮33及其上的磁环35旋转,且会旋动扭转弹簧34;编码器读头5实时读取磁环35的旋转角度,进而得到传动钢丝轮33旋转的角度;
56.同时,传动钢丝轮33通过钢丝绳31带动电机4的电机轴旋转,通过电机4上编码器实时采集电机4电机轴的转动角度,通过电机轴的旋转和角度反馈两个拨片21的位置和力;因为经过钢丝绳31传动后的力有误差,通过传动钢丝轮33的编码器读头5读取传动钢丝轮33上的磁环35的转动角度来补偿编码器采集电机轴转动角度的误差,从而形成精密无间隙的位置闭环,通过不同速度及力挤压两个拨片21,两个拨片21会通过其对应的钢丝轮22传到传动钢丝轮33上,然后因为传动钢丝轮33和电机4的电机轴之间直连,这种力及速度的差异都可以通过电机4的电流及编码器检测得到,在从动手术器械内设置有传感器,用于进行手术时感应人体组织的阻力,控制器根据弹簧弹力计算得到反馈力对应的电机电流发送至与电机连接的驱动器,驱动器控制电机产生相应的反馈力,从而形成力反馈系统;当没有挤压两个拨片21的时候,扭转弹簧34因为受到扭转方向的挤压会自动复位到初始位置,从而完成一个动作周期。
57.以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1