无线胶囊内窥镜的轨迹追踪系统、设备及介质的制作方法
1.本技术实施例属于医疗设备技术领域,特别是涉及一种无线胶囊内窥镜的轨迹追踪系统、设备及介质。
背景技术:
2.无线胶囊内窥镜是一种用于完整的消化道检查的技术,具有无痛苦、非侵入性等特点。无线胶囊内窥镜不仅可以检查食道、胃部、十二指肠、大肠等腹腔器官,还可以完整地检查小肠,这是传统胃镜或传统肠镜都无法检查的区域。无线胶囊内窥镜其实是一颗形如胶囊的微型机器人,它搭载有照明模块、相机模块、图像处理模块和无线传输模块等。无线胶囊内窥镜通过病人吞咽进入人体消化道后,可以在体内拍摄图像并实时传输到体外。医生或计算机自动诊断系统可以根据接收到的图像进行疾病诊断。
3.通常,在使用无线胶囊内窥镜对肠胃道等腹腔腔道的疾病进行检查时,可以通过体外磁场控制无线胶囊内窥镜在腹腔腔道中连续旋转运动并向前推进。对于一个确定的检查点或疑似病变区域,需要医生不间断地操作体外磁场,直到驱动无线胶囊内窥镜运动至该检查点或疑似病变区域,整个过程十分繁琐,医生的操作负担也较大。
技术实现要素:
4.有鉴于此,本技术实施例提供了一种无线胶囊内窥镜的轨迹追踪系统、设备及介质,用以驱动无线胶囊内窥镜按照指定的轨迹自动运动并到达检查点或疑似病变区域,减轻医生手工操作负担。
5.本技术实施例的第一方面提供了一种无线胶囊内窥镜的轨迹追踪系统,所述系统包括轨迹生成器、控制器、磁力生成器、驱动器和无线胶囊内窥镜;其中:
6.所述轨迹生成器,用于接收输入的腹腔腔道内的多个关键点,根据所述多个关键点生成期望轨迹;
7.所述控制器,用于根据所述无线胶囊内窥镜预设的动力学模型输出期望磁力;
8.所述磁力生成器,用于根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
9.所述驱动器,用于将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
10.本技术实施例的第二方面提供了一种无线胶囊内窥镜的轨迹追踪设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如下方法:
11.接收输入的腹腔腔道内的多个关键点;
12.根据所述多个关键点生成期望轨迹;
13.根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
14.根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进
行配置,以产生所述期望磁力;
15.将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
16.本技术实施例的第三方面提供了一种无线胶囊内窥镜的轨迹追踪装置,包括:
17.关键点接收模块,用于接收输入的腹腔腔道内的多个关键点;
18.期望轨迹生成模块,用于根据所述多个关键点生成期望轨迹;
19.期望磁力输出模块,用于根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
20.配置信息计算模块,用于根据所述期望磁力计算驱动器的配置信息;
21.驱动器配置模块,用于按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
22.胶囊控制模块,用于将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
23.本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如下方法:
24.接收输入的腹腔腔道内的多个关键点;
25.根据所述多个关键点生成期望轨迹;
26.根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
27.根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
28.将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
29.本技术实施例的第五方面提供了一种计算机程序产品,当所述计算机程序产品在终端设备上运行时,使得所述终端设备执行如下方法:
30.接收输入的腹腔腔道内的多个关键点;
31.根据所述多个关键点生成期望轨迹;
32.根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
33.根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
34.将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
35.与现有技术相比,本技术实施例包括以下优点:
36.本技术实施例提供的无线胶囊内窥镜的轨迹追踪系统可以用于无线胶囊内窥镜在人体腹腔腔道内的管状复杂环境中的轨迹追踪任务。病人在服用无线胶囊内窥镜后,可以由医生指定期望轨迹,轨迹追踪系统可以自动追踪医生设定的期望轨迹并到达检查点或疑似病变区域,极大地减少了医生的手动操作负担和精神压力,提高了疾病检查和诊断的效率。
附图说明
37.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述
中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪系统的应用场景示意图;
39.图2是本技术实施例提供的一种无线胶囊内窥镜的示意图;
40.图3是本技术实施例提供的一种驱动器的示意图;
41.图4是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪示意图;
42.图5是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪算法流程示意图;
43.图6是本技术实施例提供的一种无线胶囊内窥镜在肠道内的轨迹追踪示意图;
44.图7是本技术实施例提供的另一种无线胶囊内窥镜的轨迹追踪算法流程示意图;
45.图8是本技术实施例提供的另一种无线胶囊内窥镜在肠道内的轨迹追踪示意图;
46.图9是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪流程示意图;
47.图10是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪装置的示意图;
48.图11是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪设备的示意图。
具体实施方式
49.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域技术人员应当清楚,在没有这些具体细节的其他实施例中也可以实现本技术。在其他情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
50.下面通过具体实施例来说明本技术的技术方案。
51.参照图1,示出了本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪系统的应用场景示意图。在检查开始前,病人101被要求吞咽一个无线胶囊内窥镜102并躺在检查床103上。检查床103上覆盖有一层大型的传感器阵列104,整个传感器阵列104包括有多个按照矩形排布的传感器。在检查过程中,传感器阵列104中的部分或全部传感器将会被激活,用于对无线胶囊内窥镜进行定位。检查床103旁边安装有一台机械臂105,该机械臂105的末端执行器上安装有一个驱动器106。
52.参照图2和图3,分别是本技术实施例提供的一种无线胶囊内窥镜和驱动器的示意图。如图2所示,无线胶囊内窥镜102内嵌有一环形永磁铁1021,该环形永磁铁1021被胶囊外壳1022包裹。如图3所示,驱动器106包含有一个驱动电机1061和一个驱动器磁体1062,该驱动器磁体1062可以是球形永磁铁。
53.图1所示的无线胶囊内窥镜102、检查床103、传感器阵列104、机械臂105、驱动器106等共同构成了本技术实施例的无线胶囊内窥镜的轨迹追踪系统。此外,上述轨迹追踪系统还可以包括与检查床103、传感器阵列104、机械臂105、驱动器106等连接的数据处理计算机(图1中未示出)。数据处理计算机中可以储存有轨迹追踪算法,以及一些如驱动、定位等其他不可缺少的程序或算法。如图4所示,在检查过程中,轨迹追踪系统可以通过执行上述轨迹追踪算法,驱动无线胶囊内窥镜102在腹腔腔道401内自动追踪期望轨迹402,沿着期望轨迹402到达指定的检查点或疑似病变区域403。
54.在介绍本技术实施例的轨迹追踪系统的具体应用之前,首先对轨迹追踪算法作一介绍。
55.本技术实施例提供的轨迹追踪系统可以实现对无线胶囊内窥镜的5d控制,包括3d(三维)的磁力控制和2d(二维)的无线胶囊内窥镜朝向控制。在管状环境中,无线胶囊内窥镜的当前旋转轴不可能始终与期望旋转轴对齐。如果无线胶囊内窥镜的当前旋转轴与期望旋转轴之间的夹角太大,无线胶囊内窥镜就无法在旋转磁场的作用下正常旋转并推进。为了解决上述问题,本技术实施例使用了球形线性插值算法(spherical linear interpolation,sli)来确定无线胶囊内窥镜的下一个期望旋转方向。
56.通常,在给定无线胶囊内窥镜上所受到的期望磁力f
d
和无线胶囊内窥镜的期望旋转方向的情况下,驱动器的配置信息(d,α,β)可以通过求解如下方程得到:
[0057][0058]
上述配置信息中,d表示无线胶囊内窥镜的中心p
c
与驱动器的中心p
a
之间的距离;α表示r与p
a
h之间的角度,该角度也就是驱动器的驱动角度,其中,r=p
a
‑
p
c
表示无线胶囊内窥镜的中心p
c
与驱动器的中心p
a
之间的相对位置关系,h为驱动器的中心p
a
在无线胶囊内窥镜的期望旋转轴上的投影;β表示由p
a
、p
c
和h构成的平面u与竖直线之间的夹角。
[0059]
假设施加在无线胶囊内窥镜上的摩擦力的大小是恒定且与速度方向始终相反的,即,无线胶囊内窥镜上的摩擦力可以表示为:
[0060][0061]
其中,f
fric
为摩擦力,ρ
fric
为阻力系数,表示无线胶囊内窥镜的当前速度,表示无线胶囊内窥镜当前速度的大小。因此,在上述表达式中,表示无线胶囊内窥镜当前速度的方向。
[0062]
另一方面,本技术实施例采用系数r来表示不同腔道位置和腔道的不同蠕动情况所带来的摩擦力变化,采用f
dist
表示腔道内较小且方向不确定的噪音。因此,腔道对无线胶囊内窥镜的总作用力f
env
可以表示为:
[0063]
f
env
=r
·
f
fric
+f
dist
[0064]
根据上述信息,可以构建出无线胶囊内窥镜的动力学模型,该动力学模型可以表示为:
[0065][0066]
其中,m
c
为无线胶囊内窥镜的质量,为无线胶囊内窥镜运动过程中的加速度,f
g
表示重力。
[0067]
在本技术实施例中,轨迹追踪算法可以包括反应型轨迹追踪算法和预料型轨迹追踪算法。其中,反应型轨迹追踪算法在输出期望磁力时仅仅考虑当前时刻的误差,而预料型轨迹追踪算法不仅考虑当前时刻的误差,也预测系统未来的变化情况和误差,可以输出整
个预测窗口内的期望磁力序列。
[0068]
下面分别对反应型轨迹追踪算法和预料型轨迹追踪算法的具体实现过程进行介绍。
[0069]
(1)反应型轨迹追踪算法
[0070]
如图5所示,是本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪算法流程示意图,图5所示的算法流程图即是反应型轨迹追踪算法流程。
[0071]
按照图5所示的轨迹追踪算法流程中,系统在驱动无线胶囊内窥镜进行轨迹追踪前,首先需要根据用户(医生)指定的关键点绘制出一条期望轨迹。如图6所示,是本技术实施例提供的一种无线胶囊内窥镜在肠道内的轨迹追踪示意图。图6中所示的各个关键点即是用户在控制系统驱动无线胶囊内窥镜进行轨迹追踪前所确定的关键点。根据图6中所示的各个关键点,可以生成一条平滑的轨迹曲线,该轨迹曲线即是后续无线胶囊内窥镜需要追踪的期望轨迹。
[0072]
结合图5和图6,轨迹生成器可以在接收到输入的腹腔腔道内的多个关键点后,根据多个关键点生成期望轨迹。具体地,轨迹生成器可以通过对多个关键点进行三次样条插值(cubic spline interpolation),来生成期望轨迹。
[0073]
在轨迹追踪过程中,通过给定无线胶囊内窥镜的当前位置p
c
,可以通过求解以下方程获得其下一个期望位置p
d
:
[0074][0075]
在本技术实施例中,采用p
traj
(s),s∈[0.0,1.0]表示生成的期望轨迹上的任意一点,表示p
traj
(s)的一阶导数。因此,无线胶囊内窥镜的期望旋转方向可以通过如下公式计算得到:
[0076][0077]
令vc为无线胶囊内窥镜的期望恒定速度,则无线胶囊内窥镜在下一个期望位置p
d
处的期望速度可以表示为:
[0078][0079]
在本技术实施例中,采用e=p
d
‑
p
c
和分别表示无线胶囊内窥镜的位置误差和速度误差。
[0080]
在上述分析的基础上,如图5所示,控制器可以结合无线胶囊内窥镜的动力学模型输出其在下一个期望位置处的期望磁力。
[0081]
在本技术实施例中,图5中所示的控制器可以是pd控制器(pd controller),也可以是自适应控制器(adaptive controller)。下面分别对这两种控制器进行介绍。
[0082]
(1.1)pd控制器
[0083]
假设前述动力学模型中的系数r是恒定的(r=1.0),并且噪音f
dist
可以忽略,即噪音f
dist
等于零,则无线胶囊内窥镜在下一个期望位置处的期望磁力可以表示为:
[0084]
[0085]
其中,k
p
和k
d
为正定矩阵。
[0086]
因此,可以按照上述表达式设计pd控制器,使得系统在运行过程中保持稳定。
[0087]
如图5所示,在pd控制器输出期望磁力f
d
之后,磁力生成器可以通过计算得到驱动器的配置信息(d,α,β),在按照该配置信息对驱动器进行配置后,可以产生相应的期望磁力,该期望磁力作用于无线胶囊内窥镜上,可以驱动无线胶囊内窥镜沿期望轨迹运动。
[0088]
(1.2)自适应控制器
[0089]
假设前述动力学模型中的系数r是缓慢变化的即系数r是非恒定的,并且噪音f
dist
可以忽略,即噪音f
dist
等于零,则无线胶囊内窥镜在下一个期望位置处的期望磁力可以表示为:
[0090][0091]
其中,k
p
和k
d
为正定矩阵。
[0092]
因此,可以按照上述表达式设计自适应控制器,使得系统在运行过程中保持稳定。
[0093]
如图5所示,在自适应控制器输出期望磁力f
d
之后,磁力生成器可以通过计算得到驱动器的配置信息(d,α,β),在按照该配置信息对驱动器进行配置后,可以产生相应的期望磁力,该期望磁力作用于无线胶囊内窥镜上,可以驱动无线胶囊内窥镜沿期望轨迹运动。
[0094]
(2)预料型轨迹追踪算法
[0095]
如图7所示,是本技术实施例提供的另一种无线胶囊内窥镜的轨迹追踪算法流程示意图,图7所示的算法流程图即是预料型轨迹追踪算法流程。
[0096]
按照图7所示的轨迹追踪算法流程中,系统在驱动无线胶囊内窥镜进行轨迹追踪前,首先需要根据用户(医生)指定的关键点绘制出一条期望轨迹。如图8所示,是本技术实施例提供的另一种无线胶囊内窥镜在肠道内的轨迹追踪示意图。图8中所示的各个关键点即是用户在控制系统驱动无线胶囊内窥镜进行轨迹追踪前所确定的关键点。根据图8中所示的各个关键点,可以生成一条平滑的轨迹曲线,该轨迹曲线即是后续无线胶囊内窥镜需要追踪的期望轨迹。
[0097]
结合图7和图8,轨迹生成器可以在接收到输入的腹腔腔道内的多个关键点后,根据多个关键点生成期望轨迹。具体地,轨迹生成器可以通过对多个关键点进行三次样条插值(cubic spline interpolation),来生成期望轨迹。
[0098]
在轨迹追踪过程中,假设驱动器的控制频率为f
c
,通过给定无线胶囊内窥镜的当前位置p
c
,可以通过求解以下方程获得其在接下来n个时刻的期望位置p
d,n+i
及其对应的期望速度
[0099][0100]
将无线胶囊内窥镜的当前位置和当前速度整理为状态:
[0101][0102]
并将整个预测窗口(接下来的n个时刻)内的未来期望状态设为x
d,n
,
…
,x
d,n+n
,其
中:
[0103][0104]
可以定义用于预测无线胶囊内窥镜在整个预测窗口内运动(位置和速度)的函数φ为:
[0105][0106]
在上述分析的基础上,如图7所示,控制器可以结合无线胶囊内窥镜的动力学模型输出其在整个预测窗口内的期望磁力序列。
[0107]
在本技术实施例中,图7中所示的控制器可以是模型预测控制器(model predictive controller),也可以是鲁棒多阶段模型预测控制器(robust multi
‑
stage model predictive controller)。下面分别对这两种控制器进行介绍。
[0108]
(2.1)模型预测控制器
[0109]
在基本的模型预测控制器中,没有不确定性参数,也就是可以假定函数φ中的系数r是恒定的(r=1.0)。整个预测窗口内的期望磁力序列可以通过求解如下方程获得:
[0110][0111]
其中,w
n
,w
x
和w
f
分别表示预测窗口终点状态误差,预测窗口内过程误差,和预测窗口内输出磁力变化的权重。
[0112]
如图7所示,在模型预测控制器输出期望磁力序列后,可以采用第一个期望磁力f
d,n
求解驱动器的配置信息(d,α,β),然后开始新的一轮优化计算,如此循环进行,系统能够使无线胶囊内窥镜自动地追踪期望轨迹并到达目标位置。
[0113]
(2.2)鲁棒多阶段模型预测控制器
[0114]
在鲁棒多阶段模型预测控制器中,可以设定不确定性参数,也就是假定函数φ中的系数r是变化的。例如,系数r可以是一个分段函数,共有m种可能性。在长度为n的预测窗口内,可以在最关键的第一次预测时考虑系数r的不确定性。因此,可以将系数r的m种可能性都放入优化函数中进行计算,也就是将函数φ中的r设置为了可变参数。最后优化输出的期望磁力序列可以适应于不同r值的情形。
[0115]
在本技术实施例中,在预测窗口内的期望磁力序列f
d,n
,
…
,f
d,n+n
‑1可以通过求解以下方程获得:
[0116][0117]
其中,w
n
,w
x
和w
f
分别表示预测窗口终点状态误差,预测窗口内过程误差,和预测窗
口内输出磁力变化的权重。
[0118]
如图7所示,在鲁棒多阶段模型预测控制器输出期望磁力序列后,可以采用第一个期望磁力f
d,n
求解驱动器的配置信息(d,α,β),然后开始新的一轮优化计算,如此循环进行,系统能够使无线胶囊内窥镜自动地追踪期望轨迹并到达目标位置。
[0119]
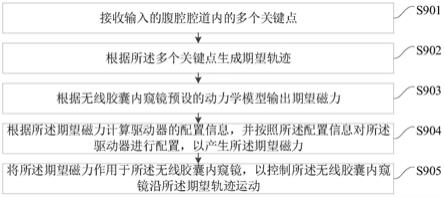
参照图9,示出了本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪流程示意图,具体可以包括如下步骤:
[0120]
s901、接收输入的腹腔腔道内的多个关键点。
[0121]
需要说明的是,图9所示的无线胶囊内窥镜的轨迹追踪流程可以是由本技术实施例提供的轨迹追踪系统通过调用前述介绍的轨迹追踪算法实现的。对于该往轨迹追踪算法,可以参见前述相关部分的介绍,在此不再赘述。
[0122]
在本技术实施例中,多个关键点可以是由用户(医生)指定的。例如,用户可以在轨迹追踪系统提供的显示界面中选择需要的关键点。
[0123]
s902、根据所述多个关键点生成期望轨迹。
[0124]
在本技术实施例中,对于多个关键点,轨迹追踪系统可以首先对其进行聚类,将多个关键点聚类为若干个点。然后,可以通过对聚类得到的若干个点进行三次样条插值,生成一条平滑曲线,该曲线即是期望无线胶囊内窥镜后续追踪的期望轨迹。
[0125]
当然,对于多个关键点,轨迹追踪系统也可以直接对其进行三次样条插值,而无需对其进行聚类处理,本技术实施例对此不作限定。
[0126]
s903、根据无线胶囊内窥镜预设的动力学模型输出期望磁力。
[0127]
在本技术实施例,轨迹追踪系统中的控制器可以基于无线胶囊内窥镜预设的动力学模型,计算出无线胶囊内窥镜在下一个期望位置处的期望磁力。
[0128]
在本技术实施例中,无线胶囊内窥镜的动力学模型可以表示为:
[0129][0130]
其中,m
c
为无线胶囊内窥镜的质量,为无线胶囊内窥镜的加速度,f
d
为期望磁力,f
g
为重力,f
fric
为无线胶囊内窥镜受到的摩擦力,r为腹腔腔道不同位置的摩擦力变化系数,f
dist
为腹腔腔道内的噪音。
[0131]
在本技术实施例的一种可能的实现方式中,控制器可以首先确定无线胶囊内窥镜的当前位置,以及下一个期望位置,上述当前位置具有对应的当前速度,下一个期望位置也具有对应的期望速度。然后,控制器可以根据当前位置和下一个期望位置,确定无线胶囊内窥镜的位置误差;以及,根据当前速度和期望速度,确定无线胶囊内窥镜的速度误差。
[0132]
在应用仅考虑当前时刻误差的反应型轨迹追踪算法时,若摩擦力变化系数r为恒定值,噪音忽略不计(等于零),则期望磁力可以表示为:
[0133][0134]
若摩擦力变化系数r为非恒定值,噪音忽略不计(等于零),则期望磁力可以表示为:
[0135]
[0136]
其中,k
p
和k
d
为正定矩阵,e为位置误差,为速度误差。
[0137]
在本技术实施例的另一种可能的实现方式中,控制器可以首先确定无线胶囊内窥镜的当前位置,以及预测窗口内的多个期望位置,上述当前位置具有对应的当前速度,上述多个期望位置分别具有对应的期望速度。然后,控制器可以基于当前位置及其对应的当前速度,以及多个期望位置及其对应的期望速度,构建用于预测无线胶囊内窥镜在预测窗口内运动的运动函数,并采用该运动函数,计算期望磁力。
[0138]
在具体实现中,由于采用上述构建出的运动函数计算出的期望磁力为无线内窥镜在多个期望位置的磁力序列,则控制器可以将磁力序列中的第一个磁力作为期望磁力。
[0139]
对于控制器如何输出期望磁力,可以参见前述对轨迹追踪算法介绍部分的说明,在此不再赘述。
[0140]
s904、根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力。
[0141]
在本技术实施例中,驱动器的配置信息可以包括无线胶囊内窥镜的中心与驱动器的中心之间的距离d、驱动器的驱动角度α,以及特定平面与竖直线之间的夹角β;其中,特定平面为无线胶囊内窥镜的中心、驱动器的中心以及驱动器的中心在无线胶囊内窥镜的期望旋转轴上的投影点构成的平面。
[0142]
在具体实现中,在给定期望磁力以及无线胶囊内窥镜的期望旋转方向的基础上,可以通过求解如下公式,得到上述配置信息(d,α,β):
[0143][0144]
在按照上述配置信息对驱动器进行配置后,可以产生相应的期望磁力。该期望磁力作用于无线胶囊内窥镜上后,可以控制无线胶囊内窥镜沿期望轨迹运动。
[0145]
s905、将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0146]
需要说明的是,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0147]
参照图10,示出了本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪装置的示意图,具体可以包括关键点接收模块1001、期望轨迹生成模块1002、期望磁力输出模块1003、配置信息计算模块1004、驱动器配置模块1005和胶囊控制模块1006,其中:
[0148]
关键点接收模块1001,用于接收输入的腹腔腔道内的多个关键点;
[0149]
期望轨迹生成模块1002,用于根据所述多个关键点生成期望轨迹;
[0150]
期望磁力输出模块1003,用于根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
[0151]
配置信息计算模块1004,用于根据所述期望磁力计算驱动器的配置信息;
[0152]
驱动器配置模块1005,用于按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
[0153]
胶囊控制模块1006,用于将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0154]
在本技术实施例中,所述期望轨迹生成模块1002具体用于对所述多个关键点进行三次样条插值,以生成所述期望轨迹。
[0155]
在本技术实施例中,所述动力学模型可以表示为:
[0156][0157]
其中,m
c
为所述无线胶囊内窥镜的质量,为所述无线胶囊内窥镜的加速度,f
d
为期望磁力,f
g
为重力,f
fric
为所述无线胶囊内窥镜受到的摩擦力,r为所述腹腔腔道不同位置的摩擦力变化系数,f
dist
为所述腹腔腔道内的噪音。
[0158]
在本技术实施例中,所述期望磁力输出模块1003还用于:
[0159]
确定所述无线胶囊内窥镜的当前位置,以及下一个期望位置,所述当前位置具有对应的当前速度,所述下一个期望位置具有对应的期望速度;根据所述当前位置和所述下一个期望位置,确定所述无线胶囊内窥镜的位置误差;以及,根据所述当前速度和所述期望速度,确定所述无线胶囊内窥镜的速度误差。
[0160]
在本技术实施例中,若所述摩擦力变化系数r为恒定值,所述噪音等于零,则所述期望磁力可以表示为:
[0161][0162]
若所述摩擦力变化系数r为非恒定值,所述噪音等于零,则所述期望磁力可以表示为:
[0163][0164]
其中,k
p
和k
d
为正定矩阵,e为所述位置误差,为所述速度误差。
[0165]
在本技术实施例中,所述期望磁力输出模块1003具体用于:
[0166]
确定所述无线胶囊内窥镜的当前位置,以及预测窗口内的多个期望位置,所述当前位置具有对应的当前速度,所述多个期望位置分别具有对应的期望速度;基于所述当前位置及其对应的当前速度,以及所述多个期望位置及其对应的期望速度,构建用于预测所述无线胶囊内窥镜在所述预测窗口内运动的运动函数;采用所述运动函数,计算所述期望磁力。
[0167]
在本技术实施例中,所述期望磁力输出模块1003具体用于:采用所述运动函数计算所述无线内窥镜在所述多个期望位置的磁力序列;将所述磁力序列中的第一个磁力作为所述期望磁力。
[0168]
在本技术实施例中,所述配置信息可以包括:所述无线胶囊内窥镜的中心与所述驱动器的中心之间的距离、所述驱动器的驱动角度,以及特定平面与竖直线之间的夹角;其中,所述特定平面为所述无线胶囊内窥镜的中心、所述驱动器的中心以及所述驱动器的中心在所述无线胶囊内窥镜的期望旋转轴上的投影点构成的平面。
[0169]
对于装置实施例而言,由于其与方法实施例基本相似,所以描述得比较简单,相关之处参见方法实施例部分的说明即可。
[0170]
参照图11,示出了本技术实施例提供的一种无线胶囊内窥镜的轨迹追踪设备的示意图。如图11所示,本实施例的无线胶囊内窥镜的轨迹追踪设备1100包括:处理器1110、存
储器1120以及存储在所述存储器1120中并可在所述处理器1110上运行的计算机程序1121。所述处理器1110执行所述计算机程序1121时实现前述无线胶囊内窥镜的轨迹追踪流程各个实施例中的步骤,例如图9所示的步骤s901至s905。或者,所述处理器1110执行所述计算机程序1121时实现上述各装置实施例中各模块/单元的功能,例如图10所示模块1001至1005的功能。
[0171]
示例性的,所述计算机程序1121可以被分割成一个或多个模块/单元,所述一个或者多个模块/单元被存储在所述存储器1120中,并由所述处理器1110执行,以完成本技术。所述一个或多个模块/单元可以是能够完成特定功能的一系列计算机程序指令段,该指令段可以用于描述所述计算机程序1121在所述无线胶囊内窥镜的轨迹追踪设备1100中的执行过程。例如,所述计算机程序1121可以被分割成关键点接收模块、期望轨迹生成模块、期望磁力输出模块、配置信息计算模块、驱动器配置模块和胶囊控制模块,各模块具体功能如下:
[0172]
关键点接收模块,用于接收输入的腹腔腔道内的多个关键点;
[0173]
期望轨迹生成模块,用于根据所述多个关键点生成期望轨迹;
[0174]
期望磁力输出模块,用于根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
[0175]
配置信息计算模块,用于根据所述期望磁力计算驱动器的配置信息;
[0176]
驱动器配置模块,用于按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
[0177]
胶囊控制模块,用于将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0178]
所述无线胶囊内窥镜的轨迹追踪设备1100可包括,但不仅限于,处理器1110、存储器1120。本领域技术人员可以理解,图11仅仅是无线胶囊内窥镜的轨迹追踪设备1100的一种示例,并不构成对无线胶囊内窥镜的轨迹追踪设备1100的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件,例如所述无线胶囊内窥镜的轨迹追踪设备1100还可以包括输入输出设备、网络接入设备、总线等。
[0179]
所述处理器1110可以是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field
‑
programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0180]
所述存储器1120可以是所述无线胶囊内窥镜的轨迹追踪设备1100的内部存储单元,例如无线胶囊内窥镜的轨迹追踪设备1100的硬盘或内存。所述存储器1120也可以是所述无线胶囊内窥镜的轨迹追踪设备1100的外部存储设备,例如所述无线胶囊内窥镜的轨迹追踪设备1100上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等等。进一步地,所述存储器1120还可以既包括所述无线胶囊内窥镜的轨迹追踪设备1100的内部存储单元也包括外部存储设备。所述存储器1120用于存储所述计算机程序1121以及所述无线胶囊内窥镜的轨迹追踪设备1100所需的其他程序和数据。所述存储器1120还可以用于暂时地存储已经输出或者将要输出的
数据。
[0181]
本技术实施例还公开了一种无线胶囊内窥镜的轨迹追踪设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如下方法:
[0182]
接收输入的腹腔腔道内的多个关键点;
[0183]
根据所述多个关键点生成期望轨迹;
[0184]
根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
[0185]
根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
[0186]
将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0187]
本技术实施例还公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如下方法:
[0188]
接收输入的腹腔腔道内的多个关键点;
[0189]
根据所述多个关键点生成期望轨迹;
[0190]
根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
[0191]
根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
[0192]
将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0193]
本技术实施例还公开了一种一种计算机程序产品,当所述计算机程序产品在终端设备上运行时,使得所述终端设备执行如下方法:
[0194]
接收输入的腹腔腔道内的多个关键点;
[0195]
根据所述多个关键点生成期望轨迹;
[0196]
根据无线胶囊内窥镜预设的动力学模型输出期望磁力;
[0197]
根据所述期望磁力计算驱动器的配置信息,并按照所述配置信息对所述驱动器进行配置,以产生所述期望磁力;
[0198]
将所述期望磁力作用于所述无线胶囊内窥镜,以控制所述无线胶囊内窥镜沿所述期望轨迹运动。
[0199]
以上所述实施例仅用以说明本技术的技术方案,而非对其限制。尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1