一种实时追踪人体下肢运动的穿戴设备
1.本发明涉及智能穿戴和人机交互领域,具体是一种实时追踪人体下肢运动的穿戴设备。
背景技术:
2.人体运动捕捉技术在自动化控制、交互式娱乐、虚拟现实、医疗康复和运动训练等领域存在着巨大的应用价值。
3.目前基于可穿戴式设备的用户运动轨迹追踪存在实时性差、准确度低等问题,无法给用户提供良好的体验感,甚至由于其穿戴特性,给用户造成较强的侵入感。
4.另外存在基于光学标记或图像的人体运动追踪方法,尽管识别准确度高,但受限于场地光照和摄像系统识别范围,遮挡问题依然没有好的解决方案,而且图像处理所产生的计算和存储开销往往比较大,导致此类的人体运动追踪设备成本居高不下。
技术实现要素:
5.本发明的目的是提供一种实时追踪人体下肢运动的穿戴设备,包括可穿戴主体、感知模块、主控模块和上位机;
6.所述可穿戴主体包括n个可穿戴部件,其中,n-1个可穿戴部件均设置有感知模块,1个可穿戴部件设置有主控模块;
7.所述感知模块实时监测用户穿戴可穿戴主体后的运动信号,并传输至主控模块;
8.所述主控模块对接收到的运动信号进行姿态解算,得到姿态解算结果;
9.所述主控模块将姿态解算结果和运动信号发送至上位机;
10.所述上位机对姿态解算结果和运动信号进行解算,得到用户空间运动姿态。
11.进一步,所述感知模块包括九轴惯性传感器;所述九轴惯性传感器包括三轴陀螺仪、三轴加速度计、三轴磁力计;
12.所述九轴惯性传感器监测用户的运动信号;所述运动信号包含3轴线性加速度传感信号、3轴陀螺仪传感信号、3轴磁力计传感信号;
13.所述九轴惯性传感器在人体下肢关节符合运动学范围内可移动;所述六个模块可拆卸。
14.进一步,主控模块对接收到的运动信号进行姿态解算的步骤包括:
15.1)建立用户姿态信息方程,即:
[0016][0017]
式中,参数i2=j2=k2=ijk=-1;u=[u
x
,uy,uz]
t
为地面坐标下物体旋转轴;θ为旋转角度;(q0,q1,q2,q3)为四元数;
[0018]
2)建立旋转矩阵rg,即:
[0019][0020]
3)利用三轴陀螺仪进行四元数的姿态更新,得到更新后的陀螺仪四元数q
w,t
,即:
[0021][0022]
式中,q
t-1
为上一时刻校准好的估计四元数;δt为时间间隔;
[0023]
其中,陀螺仪四元数导数如下所示:
[0024][0025]
式中,w
t
=[0,w
x
,wy,wz]
t
为陀螺仪监测到的3轴陀螺仪传感信号;
[0026]
3)利用梯度下降法得到梯度四元数,步骤包括:
[0027]
3.1)分别计算加速度计的估计值和加速度计的误差函数fa,即:
[0028][0029][0030]
式中,是标准化后加速度计测量的值;旋转矩阵rb=(rg)-1
;gg=[0,0,1]
t
为重力加速度;
[0031]
3.2)计算误差函数fa对四元数q的偏导数,得到雅各比矩阵ja,即:
[0032][0033]
3.3)计算加速度计误差函数的梯度即:
[0034][0035]
3.4)设定中间变量hm,即:
[0036][0037]
式中,是标准化后磁力计测量的值;h
x
,hy,hz为中间变量的元素;
[0038]
3.5)计算中间变量的估计值和磁力计的误差函数fm;
[0039][0040][0041]
3.6)计算误差函数fm对四元数q的偏导数,得到雅各比矩阵jm,即:
[0042][0043]
3.7)计算磁力计误差函数的梯度即:
[0044][0045]
3.9)计算总体梯度即:
[0046][0047]
式中,向量向量
[0048]
3.10)根据总体梯度沿梯度反方向迭代更新梯度四元数得到:
[0049][0050]
其中,最优迭代步长μ
t
如下所示:
[0051][0052]
式中,α为增益;α>1;
[0053]
4)融合陀螺仪四元数与梯度四元数,更新最终的四元数。
[0054][0055]
式中,γ
t
为权重;
[0056]
5)通过式(17)对四元数进行更新,得到用户姿态解算结果,即:
[0057][0058]
式中,表示空间角。
[0059]
进一步,所述上位机对姿态解算结果和运动信号进行解算的步骤包括:
[0060]
a)利用d-h变换矩阵输出用户腿部关节的姿势,即:
[0061][0062]
loc
ankle-to-knee
=g(θ1,θ2,θ3,θ4)
ꢀꢀꢀ
(20)
[0063]
loc
ankle
=loc
knee
+loc
ankle-to-knee
ꢀꢀꢀ
(21)
[0064]
式中,参数lu=||loc
knee
||;loc
knee
是通过d-h变换得到的膝盖位置;θ1、θ2、θ3分别是大腿股骨俯仰角、翻滚角、偏航角;θ4为小腿胫骨俯仰角;loc
ankle-to-knee
是脚踝和膝盖的相对位置;loc
ankle
是脚踝的绝对位置;
[0065]
b)计算膝盖处运动速度v
knee
(t),即:
[0066][0067]
将膝盖处运动速度v
knee
(t)带入式(20)-(21),得到:
[0068][0069][0070][0071]
式中:accel
l,t
是小腿处惯性传感器测量的加速度值;rot是转换到下肢坐标系的旋转矩阵;v
t-1
为上一时刻的速度;
[0072]
c)预测当前状态x(k|k-1),即:
[0073]
x(k|k-1)=a
·
x(k-1|k-1)+b
·
u(k)
ꢀꢀꢀ
(24)
[0074]
式中,a和b是参数矩阵;状态包括膝盖位置与膝盖速度;x(k-1|k-1)为上一状态最优预测值;u(k)为现在状态的控制量;
[0075]
d)预测当前状态的协方差p(k|k-1),即:
[0076]
p(k|k-1)=a
·
p(k-1|k-1)a
t
+n
ꢀꢀꢀ
(25)
[0077]
式中,p(k-1|k-1)是x(k-1|k-1)对应的协方差;a
t
是a的转置矩阵;n是系统的噪声;
[0078]
e)估计参考状态x(k|k),即:
[0079]
x(k|k)=x(k|k-1)+kg(k)
·
(z(k)-h
·
x(k|k-1))
ꢀꢀꢀ
(26)
[0080]
式中,kg(k)是k时刻的卡尔曼增益;h是测量参数;z(k)是状态测量值;
[0081]
其中,k时刻的卡尔曼增益kg(k)如下所示:
[0082]
kg(k)=p(k|k-1)
·ht
·
(h
·
p(k|k-1)
·ht
+∑)-1
ꢀꢀꢀ
(27)
[0083]
式中,p(k|k-1)为k-1时刻的协方差;
[0084]
k时刻协方差p(k|k)如下所示:
[0085]
p(k|k)=(1-kg(k)
·
h)
·
p(k|k-1)
ꢀꢀꢀ
(28)
[0086]
式中,∑是观测分布的不确定度;
[0087]
f)根据膝盖位置、空间角确定用户的空间运动姿态。
[0088]
进一步,还包括用于上位机、主控模块信息交互的通信模块。
[0089]
进一步,所述通信模块为无线通信模块或有线串口通信模块。
[0090]
进一步,还包括为感知模块、主控模块和通信模块供电的供电模块。
[0091]
进一步,所述供电模块包括充电模块、稳压放电电源板和锂电池;
[0092]
所述充电模块用于为锂电池充电;
[0093]
锂电池放电时,电压经过稳压模块稳压后为感知模块、主控模块和通信模块供电。
[0094]
进一步,还包括连接带;
[0095]
所述连接带包括连接感知模块与主控模块的信号线,连接主控模块与通信模块的信号线,连接感知模块、主控模块、通信模块、供电模块的供电线。
[0096]
进一步,带有感知模块的可穿戴部件为供用户下肢穿戴的绑带。
[0097]
本发明的技术效果是毋庸置疑的,本发明基于微机电系统技术,可以实时动态追踪用户下肢运动轨迹、识别下肢动作姿态,目的是解决现有技术中存在的问题,不受限于场地,以较少的设备成本,保证人体下肢运动实时追踪的准确度在可接受范围内,准确、高效、便携地应用于控制、交互、康复等运动捕捉领域。
[0098]
本发明提供了一种有线/无线双模的实时追踪人体下肢运动的穿戴设备,配合上位机算力,结合高识别率的态势感知算法和机器学习状态预测算法,在考虑穿戴舒适性的情况下,有效平衡了设备成本和运动捕捉准确率的问题,能实时地感知人体大腿与小腿姿态变化,追踪下肢移动轨迹、识别下肢动作,兼具灵活性、低延时、结构简单、制作成本低等优点。
附图说明
[0099]
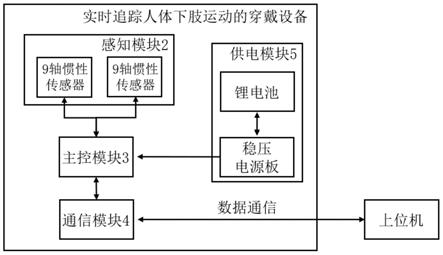
图1为实时追踪人体下肢运动穿戴设备的结构框图;
[0100]
图2为实时追踪人体下肢运动穿戴设备的佩戴结构示意图;
[0101]
图3为实时追踪人体下肢运动算法流程图;
[0102]
图4为实时追踪人体下肢运动穿戴设备的电路设计图;
[0103]
图5为实施例6中应用实时追踪人体下肢运动穿戴设备的下肢健身动作示意图;图5(a)为下肢健身动作示意图i;图5(b)为下肢健身动作示意图ii;图5(c)为下肢健身动作示意图iii;图5(d)为下肢健身动作示意图iv;
[0104]
图中:可穿戴主体1、感知模块2、主控模块3、通信模块4、供电模块5、连接带6。
具体实施方式
[0105]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0106]
实施例1:
[0107]
参见图1至图4,一种实时追踪人体下肢运动的穿戴设备,包括可穿戴主体(1),感知模块2,主控模块3,上位机,用于上位机、主控模块3信息交互的通信模块4,为感知模块2、主控模块3和通信模块4供电的供电模块5,连接带6;
[0108]
所述可穿戴主体1包括3个可穿戴部件,其中,2个可穿戴部件均设置有感知模块2,1个可穿戴部件设置有主控模块3、通信模块4、供电模块5;
[0109]
带有感知模块2的可穿戴部件为供用户下肢穿戴的绑带。
[0110]
带有感知模块2的可穿戴部件包括人体小腿、大腿的绑带。带有主控模块3、通信模
块4、供电模块5的可穿戴部件包括人体腰部绑带。
[0111]
所述感知模块2实时监测用户穿戴可穿戴主体1后的运动信号,并传输至主控模块3;
[0112]
所述感知模块2包括九轴惯性传感器;所述九轴惯性传感器包括三轴陀螺仪、三轴加速度计、三轴磁力计;
[0113]
所述九轴惯性传感器监测用户的运动信号;所述运动信号包含3轴线性加速度传感信号、3轴陀螺仪传感信号、3轴磁力计传感信号;
[0114]
所述九轴惯性传感器在人体下肢关节符合运动学范围内可移动;所述六个模块可拆卸。
[0115]
所述主控模块3对接收到的运动信号进行姿态解算,得到姿态解算结果;
[0116]
所述主控模块3将姿态解算结果和运动信号发送至上位机;
[0117]
主控模块3对接收到的运动信号进行姿态解算的步骤包括:
[0118]
1)建立用户姿态信息方程,即:
[0119][0120]
式中,参数i2=j2=k2=ijk=-1;u=[u
x
,uy,uz]
t
为地面坐标下物体旋转轴;θ为旋转角度;参数i、j为虚数。q0、q1、q3分别表示;
[0121]
2)建立旋转矩阵rg,即:
[0122][0123]
3)利用三轴陀螺仪进行四元数的姿态更新,得到更新后的陀螺仪四元数q
w,t
,即:
[0124][0125]
式中,q
t-1
为上一时刻校准好的估计四元数;δt为时间间隔;
[0126]
其中,陀螺仪四元数导数如下所示:
[0127][0128]
式中,w
t
=[0,w
x
,wy,wz]
t
为陀螺仪监测到的3轴陀螺仪传感信号;w
x
,wy,wz分别为x、y、z轴上的陀螺仪传感信号。
[0129]
3)利用梯度下降法得到梯度四元数,步骤包括:
[0130]
3.1)分别计算加速度计的估计值和加速度计的误差函数fa,即:
[0131][0132][0133]
式中,是标准化后加速度计测量的值;旋转矩阵rb=(rg)-1
;gg=[0,0,1]
t
为重力加速度;a
x
,ay,az分别为x、y、z轴上的加速度计测量的值。
[0134]
3.2)计算误差函数fa对四元数q的偏导数,得到雅各比矩阵ja,即:
[0135][0136]
式中,分别表示误差函数fa在x、y、z轴上的偏导分量。
[0137]
3.3)计算加速度计误差函数的梯度即:
[0138][0139]
3.4)设定中间变量hm,即:
[0140][0141]
式中,是标准化后磁力计测量的值;h
x
,hy,hz为中间变量的元素;
[0142]
3.5)计算中间变量的估计值和磁力计的误差函数fm;
[0143][0144][0145]
3.6)计算误差函数fm对四元数q的偏导数,得到雅各比矩阵jm,即:
[0146][0147]
式中,分别表示误差函数fm在x、y、z轴上的偏导分量。
[0148]
3.7)计算磁力计误差函数的梯度即:
[0149][0150]
3.9)计算总体梯度即:
[0151][0152]
式中,向量向量
[0153]
3.10)根据总体梯度沿梯度反方向迭代更新梯度四元数得到:
[0154][0155]
其中,最优迭代步长μ
t
如下所示:
[0156][0157]
式中,α为增益;α>1;
[0158]
4)融合陀螺仪四元数与梯度四元数,更新最终的四元数。
[0159][0160]
式中,γ
t
为权重;
[0161]
5)通过式(17)对四元数进行更新,得到用户姿态解算结果,即:
[0162][0163]
式中,表示空间角。
[0164]
所述上位机对姿态解算结果和运动信号进行解算,得到用户空间运动姿态。
[0165]
所述上位机对姿态解算结果和运动信号进行解算的步骤包括:
[0166]
a)利用d-h变换矩阵输出用户腿部关节的姿势,即:
[0167][0168]
loc
ankle-to-knee
=g(θ1,θ2,θ3,θ4)
ꢀꢀꢀ
(20)
[0169]
loc
ankle
=loc
knee
+loc
ankle-to-knee
ꢀꢀꢀ
(21)
[0170]
式中,参数lu=||loc
knee
||;loc
knee
是通过d-h变换得到的膝盖位置;θ1、θ2、θ3分别是大腿股骨俯仰角、翻滚角、偏航角;θ4为小腿胫骨俯仰角;loc
ankle-to-knee
是脚踝和膝盖的相对位置;loc
ankle
是脚踝的绝对位置;
[0171]
b)计算膝盖处运动速度v
knee
(t),即:
[0172][0173]
将膝盖处运动速度v
knee
(t)带入式(20)-(21),得到:
[0174][0175][0176]
[0177]
式中:accel
l,t
是小腿处惯性传感器测量的加速度值;rot是转换到下肢坐标系的旋转矩阵;v
t-1
为上一时刻的速度;
[0178]
c)预测当前状态x(k|k-1),即:
[0179]
x(k|k-1)=a
·
x(k-1|k-1)+b
·
u(k)
ꢀꢀꢀ
(24)
[0180]
式中,a和b是参数矩阵;状态包括膝盖位置与膝盖速度;x(k-1|k-1)为上一状态最优预测值;u(k)为现在状态的控制量;
[0181]
d)预测当前状态的协方差p(k|k-1),即:
[0182]
p(k|k-1)=a
·
p(k-1|k-1)a
t
+n
ꢀꢀꢀ
(25)
[0183]
式中,p(k-1|k-1)是x(k-1|k-1)对应的协方差;a
t
是a的转置矩阵;n是系统的噪声;
[0184]
e)估计参考状态x(k|k),即:
[0185]
x(k|k)=x(k|k-1)+kg(k)
·
(z(k)-h
·
x(k|k-1))
ꢀꢀꢀ
(26)
[0186]
式中,kg(k)是k时刻的卡尔曼增益;h是测量参数;z(k)是状态测量值;
[0187]
其中,k时刻的卡尔曼增益kg(k)如下所示:
[0188]
kg(k)=p(k|k-1)
·ht
·
(h
·
p(k|k-1)
·ht
+∑)-1
ꢀꢀꢀ
(27)
[0189]
式中,p(k|k-1)为k-1时刻的协方差;∑是观测分布的不确定度;
[0190]
k时刻协方差p(k|k)如下所示:
[0191]
p(k|k)=(1-kg(k)
·
h)
·
p(k|k-1)
ꢀꢀꢀ
(28)
[0192]
f)根据膝盖位置、空间角确定用户的空间运动姿态。
[0193]
所述通信模块4为无线通信模块或有线串口通信模块。
[0194]
所述供电模块5包括充电模块、稳压放电电源板和锂电池;
[0195]
所述充电模块用于为锂电池充电;
[0196]
锂电池放电时,电压经过稳压模块稳压后为感知模块2、主控模块3和通信模块4供电。
[0197]
所述连接带6包括连接感知模块2与主控模块3的信号线,连接主控模块3与通信模块4的信号线,连接感知模块2、主控模块3、通信模块4、供电模块的供电线。
[0198]
实施例2:
[0199]
参见图1、图2,一种实时动态地追踪人体下肢运动的穿戴设备,主要包括可穿戴主体1、感知模块2、主控模块3、通信模块4、供电模块5、连接带6和上位机。
[0200]
所述可穿戴主体1包括人体小腿、大腿和腰部绑带;
[0201]
进一步,穿戴主体1腰部绑带位置设有总开关和无线通信开关。
[0202]
所述可穿戴主1小腿、大腿绑带上设置有感知模块2,腰部绑带设置有主控模块3、通信模块4和供电模块5。
[0203]
所述六个模块可拆卸,绑带可调节,因此,穿戴设备能针对不同用户进行调整。
[0204]
所述感知模块2实时监测并采集可穿戴主体1姿态变化;
[0205]
所述感知模块2主要包括九轴惯性传感器,即三轴陀螺仪、三轴加速度计、三轴磁力计;
[0206]
所述九轴惯性传感器被设置在可穿戴主体1小腿、大腿绑带处,在人体下肢关节符合运动学范围内可移动,监测人体下肢的运动状态,得到人体大腿和小腿的运动信号:包含3轴线性加速度传感信号、3轴陀螺仪传感信号、3轴磁力计传感信号各两组,通过连接带6传输至主控模块3。
[0207]
参见图3流程图,所述主控模块3首先对磁力计进行椭圆曲线校准,加速度计和陀螺仪进行静态校准。校准完成后,对并行采集的腿部运动信号进行姿态解算,得到解算结果,将原始数据与姿态信息通过通信模块4传输至上位机,上位机根据构建的数学模型对姿态信息进行约束处理,结合原始数据,预测并追踪穿戴者下肢运动姿态,完成下肢运动轨迹绘制。
[0208]
所述通信模块4为无线通信模块或有线串口通信模块。
[0209]
通信模块4具有指示灯,无线通信模块不限于蓝牙、zigbee、wi-fi等无线协议。
[0210]
在无线模式下,需要开启可穿戴本体1腰部总开关和无线通信开关,进行蓝牙配对,连接成功后通信模块上的指示灯由闪烁变为常亮。
[0211]
在有线模式下,开启可穿戴本体1腰部总开关,关闭无线通信开关,将可穿戴本体与上位机通过数据线连接即可使用。
[0212]
所述连接带6连接小腿、大腿和腰部,接通感知模块2和主控模块3的信号线,也包含接通供电模块5的供电线。
[0213]
所述供电模块5通过连接带6为感知模块2、主控模块3和通信模块4供电;
[0214]
所述供电模块5包含充电、稳压放电模块和锂电池;
[0215]
所述锂电池的电压经过稳压模块稳压后通过连接带6为感知模块2、主控模块3和通信模块4供电。
[0216]
实施例3:
[0217]
一种实时动态地追踪人体下肢运动的穿戴设备,主要包括可穿戴主体1、感知模块2、主控模块3、通信模块4、供电模块5、连接带6和上位机。
[0218]
所述可穿戴主体1包括人体小腿、大腿和腰部绑带;
[0219]
穿戴主体1腰部绑带位置设有总开关和无线通信开关。
[0220]
所述可穿戴主1小腿、大腿绑带上设置有感知模块2,腰部绑带设置有主控模块3、通信模块4和供电模块5。
[0221]
所述感知模块2实时监测并采集可穿戴主体1姿态变化;
[0222]
所述感知模块2主要包括九轴惯性传感器,即三轴陀螺仪、三轴加速度计、三轴磁力计;
[0223]
所述九轴惯性传感器被设置在可穿戴主体1小腿、大腿绑带处,在人体下肢关节符合运动学范围内可移动,监测人体下肢的运动状态。
[0224]
所述主控模块3首先对磁力计进行椭圆曲线校准,加速度计和陀螺仪进行静态校准。由于磁力计对环境磁场敏感,当穿戴设备处在一个磁场复杂场景时,椭圆曲线校准失效,在姿态解算时,梯度下降算法对磁力计采集到的地磁信号置信权重下调或对磁力误差函数置0,向上位机传输地磁数据不可信的指令信号。
[0225]
所述通信模块4为无线通信模块或有线串口通信模块。
[0226]
所述连接带6连接小腿、大腿和腰部,接通感知模块2和主控模块3的信号线,也包
含接通供电模块5的供电线。
[0227]
所述供电模块5通过连接带6为感知模块2、主控模块3和通信模块4供电。
[0228]
实施例4:
[0229]
一种实时动态地追踪人体下肢运动的穿戴设备,主要包括可穿戴主体1、感知模块2、主控模块3、通信模块4、供电模块5、连接带6和上位机。
[0230]
所述可穿戴主体1包括人体小腿、大腿和腰部绑带;
[0231]
穿戴主体1腰部绑带位置设有总开关和无线通信开关。
[0232]
所述感知模块2实时监测并采集可穿戴主体1姿态变化;
[0233]
感知模块2主要包括九轴惯性传感器;
[0234]
所述九轴惯性传感器被设置在可穿戴主体1小腿、大腿绑带处,在人体下肢关节符合运动学范围内可移动,监测人体下肢的运动状态。
[0235]
所述主控模块3对接收到的加速度、磁力、角速度数据使用梯度下降法对下肢运动进行姿态解算,将结果与原始数据发送至上位机,上位机做进一步状态预测,绘制下肢运动的追踪轨迹。上位机会实时监测追踪延迟,当延迟超过阈值时,只完成对解算结果的约束处理,不做进一步的状态预测,直接输出下肢运动轨迹。
[0236]
所述通信模块4为无线通信模块或有线串口通信模块。
[0237]
所述连接带6连接小腿、大腿和腰部,接通感知模块2和主控模块3的信号线,也包含接通供电模块5的供电线。
[0238]
所述供电模块5通过连接带6为感知模块2、主控模块3和通信模块4供电。
[0239]
实施例5:
[0240]
参见图4,自制的实时追踪人体下肢运动的穿戴设备电路设计图,主要如下:
[0241]
腰部绑带处安装的有arduino nano开发板、蓝牙模块、电源模块。其中,本实施例使用的arduino nano是arduino usb接口的微型版本,开发便捷、尺寸小巧,算力在本实例中充足。示意图展示的蓝牙模块,与上位机进行无线通信。所述电源模块的锂电池经升压稳压模块为追踪下肢运动穿戴设备提供电力。
[0242]
本实施例中,包含两个九轴惯性测量单元mpu9250,mpu9250是一款空间运动传感器芯片,内置加速度计、陀螺仪和磁力计,并行独立采集单腿大腿、小腿的运动信息,包含三轴线性加速度、三轴角速度和三轴磁力测量信号,采集频率完全满足人体活动,它的特点为其体积小易于携带、可采集九轴惯性数据、价格低、精度高等,与arduino nano通过i2c总线或spi协议进行通信。
[0243]
值得说明的是,mpu9250被安装在腿部绑带时,正面朝上,与图2中xyz轴对齐,便于后续运算。
[0244]
实施例6:
[0245]
原始传感器数据经过姿态解算和状态预测,处理后的数据本身带有下肢运动的特征信息,不限于使用简单条件约束、机器学习分类器的方法对下肢特别动作进行分类识别,并能对动作完成度进行评定,应用于人体活动识别、运动康复等领域,参见图5是应用实时追踪人体下肢运动穿戴设备的下肢健身动作示意图。
[0246]
实施例7:
[0247]
一种实时追踪人体下肢运动的穿戴设备,主要包括可穿戴主体1、感知模块2、主控
模块3、通信模块4、供电模块5、连接带6和上位机;
[0248]
所述可穿戴主体1包括人体小腿、大腿和腰部绑带;
[0249]
所述可穿戴主体1小腿、大腿绑带上设置有感知模块2,可穿戴主体1腰部绑带设置有主控模块3、通信模块4和供电模块5;
[0250]
所述感知模块2实时监测并采集可穿戴主体1姿态变化以及运动信息;
[0251]
所述感知模块2主要包括九轴惯性传感器,即三轴陀螺仪、三轴加速度计、三轴磁力计;
[0252]
所述九轴惯性传感器被设置在可穿戴主体1小腿、大腿绑带处,监测人体下肢的运动状态,得到人体大腿和小腿的运动信号:包含3轴线性加速度传感信号、3轴陀螺仪传感信号、3轴磁力计传感信号各两组,通过连接带6传输至主控模块3;
[0253]
所述连接带6连接小腿、大腿和腰部,用于接通感知模块2和主控模块3的信号线,且包含接通供电模块5的供电线。
[0254]
所述主控模块3在完成惯性传感器的校准后,对接收到的小腿、大腿的传感器信息进行姿态解算,后将得到的姿态解算结果与原始信号经通信模块4发送至上位机,考虑到实时性与主控模块3算力,采取梯度下降法用于姿态解算,主要步骤如下:
[0255]
1)采用四元数来表示人体下肢姿态信息。四元数的表示方法能避免使用欧拉角带来的万向节死锁的问题,且能降低计算过程的复杂度。四元数形式有:
[0256][0257]
式中i2=j2=k2=ijk=-1,u=[u
x
,uy,uz]
t
为地面坐标下物体旋转轴,θ为旋转角度。给定一个单位四元数,可以构造出旋转矩阵如下:
[0258][0259]
2)利用陀螺仪进行四元数的姿态更新。利用龙格库塔法求解到四元数微分方程,更新过程如下:
[0260][0261][0262]
其中,陀螺仪四元数q
w,t
是用上一时刻校准好的估计四元数q
t-1
与陀螺仪四元数导数来完成更新,w
t
=[0,w
x
,wy,wz]
t
为直接从陀螺仪中获得的角速度。
[0263]
3)依据加速度计和磁力计的测量值构建最小化问题,利用梯度下降法得到另一组四元数。
[0264]
第一步,求加速度误差函数的梯度。加速度计所测的数据大致为重力的值,所以重力加速度gg=[0,0,1]
t
经过旋转矩阵rb=(rg)-1
,得到加速度计的估计值:
[0265]
[0266][0267]
式(6)中,是标准化后加速度计测量的值,两者求差得到加速度计的误差,体现的是加速度计对四元数更新的影响,进一步地求解函数fa对四元数q的偏导数,得到雅各比矩阵ja:
[0268][0269]
结合式(6)和(7)得到加速度计误差函数的梯度:
[0270][0271]
第二步,求磁力误差函数的梯度。设地磁北极方向为参考坐标系的x轴正方向,使磁力计能迅速自动地收敛到当前姿态,那么此处y轴的数据就为0。求解磁力误差函数梯度的过程类似第一步,为了便于叙述,引入中间变量hm:
[0272][0273][0274][0275][0276][0277]
第三步,结合前两步得到的加速度计和磁力计误差函数及其雅各比矩阵,由式(8)、(13)得到总体的梯度:
[0278][0279][0280]
最小化问题即为使加速度计、磁力计的误差函数f
a,m
值最小,则根据总体梯度沿梯度反方向迭代更新梯度四元数以完成校正:
[0281][0282]
式中:μ
t
为迭代步长,最优取值如下:
[0283][0284]
其中,α为增益,通过先验知识调节,α>1。
[0285]
4)融合陀螺仪四元数与梯度四元数,更新最终的四元数。
[0286][0287]
当陀螺仪四元数的收敛速度和梯度四元数的收敛速度与它们前面的权重相当时,即(1-γ
t
)β=γ
t
μ
t
/δt,γ
t
的取值最优,β的取值与陀螺仪的随机误差有关,由于陀螺仪具有高动态特性,在温度变化和运动时存在零点漂移和低频干扰问题。
[0288]
5)通过式(17)对四元数进行更新,这时四元数表示物体实时的姿态信息,单位四元数能表示三维变换,可以从四元数中获取物体运动的欧拉角。根据式(1):
[0289][0290]
至此,下肢穿戴设备已实时地计算出下肢在6个自由度上的空间角信息,可快速估算出下肢运动姿态。
[0291]
所述供电模块5为感知模块2、主控模块3和通信模块4供电。
[0292]
所述上位机为电脑主机,由于穿戴设备的主控模块3算力有限,下肢运动追踪需要上位机提供算力辅助,以获得更精准的下肢运动姿态信息。
[0293]
人体膝关节运动服从铰链模型、髋关节属于球面关节,可以用4个自由度来定义下肢的运动状态,被安置在大腿股骨和小腿胫骨附近的感知模块2并行采集到6轴的运动信息。为了便于叙述,以下先从人体单腿的情况进行讨论,基于以上构造出这样的数学模型:以股骨和髋骨结合处为下肢坐标系原点,大腿和小腿长度作为系统参数lu和l
l
,对膝盖在三维直角坐标系中的位置进行估计,即可完成下肢运动姿态的追踪,主要步骤如下:
[0294]
1)在医学上,下肢关节运动角度的范围是有限制的。上位机首先对穿戴设备传递来的运动解算结果进行初步筛查,将异常数据删除,并根据前后时间点的正常数据进行线性插值。由于膝关节运动遵从铰链模型,将大腿与小腿处惯性传感器采集到的偏航角、翻滚角取平均值,下肢运动的4个自由度以空间角表示为:{θ1,θ2,θ3,θ4},θ1、θ2、θ3分别是大腿股骨俯仰角、翻滚角、偏航角,θ4为小腿胫骨俯仰角。
[0295]
2)使用d-h变换矩阵输出整个腿部关节的姿势。
[0296][0297]
式中:||loc
knee
||=lu,loc
knee
是通过d-h变换得到的膝盖位置。类似地,脚踝相对于膝盖的相对位置也可以计算出来,进一步,膝盖位置与脚踝相对位置的矢量相加即为脚踝的绝对位置:
[0298]
loc
ankle-to-knee
=g(θ1,θ2,θ3,θ4)
ꢀꢀꢀ
(20)
[0299]
loc
ankle
=loc
knee
+loc
ankle-to-knee
ꢀꢀꢀ
(21)
[0300]
同样地,式(20)满足||loc
ankle-to-knee
||=f
l
。
[0301]
3)速度是物体运动位移的一阶导数,计算膝盖处加速度信息。
[0302][0303]
带入式(20)、(21)得:
[0304][0305][0306][0307]
式中:accel
l,t
是小腿处惯性传感器测量的加速度值,rot是转换到下肢坐标系的旋转矩阵。
[0308]
4)使用扩展卡尔曼算法,对膝盖位置进行预测,状态包含膝盖位置与膝盖速度。卡尔曼滤波通过上一状态最优值预测当前的状态,即:
[0309]
x(k|k-1)=a
·
x(k-1|k-1)+b
·
u(k)
ꢀꢀꢀ
(24)
[0310]
式中a和b是系统参数。x(k|k-1),利用上一状态最优预测值x(k-1|k-1)的结果,u(k)为现在状态的控制量,若没有,可为0。式(1)对系统结果进行更新,对应于x的协方差还需要进行预测:
[0311]
p(k|k-1)=a
·
p(k-1|k-1)a
t
+n
ꢀꢀꢀ
(25)
[0312]
式中p(k|k-1)是x(k|k-1)对应的协方差,表示状态估计的不确定性,p(k-1|k-1)是x(k-1|k-1)对应的协方差,a
t
是a的转置矩阵,n是系统的噪声。
[0313]
对系统状态量和协方差进行预测后,进行参考测量值的估计:
[0314]
x(k|k)=x(k|k-1)+kg(k)
·
(z(k)-h
·
x(k|k-1))
ꢀꢀꢀ
(26)
[0315]
式中kg(k)是k时刻的卡尔曼增益,h是测量系统的参数,z(k)是状态测量值。为了实现递归,每次的kg都是实时更新的:
[0316]
kg(k)=p(k|k-1)
·ht
·
(h
·
p(k|k-1)
·ht
+∑)-1
ꢀꢀꢀ
(27)
[0317]
p(k|k)=(1-kg(k)
·
h)
·
p(k|k-1)
ꢀꢀꢀ
(28)
[0318]
每次p(k|k)和kg(k)都需要前一时刻的值来更新,∑是观测分布的不确定度,结合历史最优状态量、不确定性和当前测量状态。
[0319]
至此,完成对膝盖位置的预测,联合空间角,精确追踪腿部的空间运动姿态。
[0320]
所述通信模块4为无线通信模块或有线串口通信模块,用于与上位机信息交换。
[0321]
所述供电模块5包括充电、稳压放电电源板和锂电池;
[0322]
所述锂电池的电压经过稳压模块稳压后通过连接带6为感知模块2、主控模块3和通信模块4供电。
[0323]
所述九轴惯性传感器在人体下肢关节符合运动学范围内可移动;所述六个模块可
拆卸。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1