一种基于惯性传感器的人体足部运动站立相检测方法
一种基于惯性传感器的人体足部运动站立相检测方法
一、技术领域
1.本发明涉及一种步态分析领域,尤其涉及一种多运动模式交替存在情况下的站立相检测方法。
二、
背景技术:
2.步行是人类最基本的运动,与个人的健康状况、年龄、性别、生活习惯等因素有关,人体步态检测在诸多领域都有重要的科学意义及应用价值,例如在医疗诊断方面,步态分析可以评估患者是否存在异常步态以及步态异常的性质和程度或者评定康复治疗的效果;在老年人监护方面,可以对老年人日常活动进行评估,然后有针对性对老年人的进行引导、训练,提高生活质量;在生物力学方面,可以提供为进行研究所需要的躯干和下肢的基本参数。
3.随着微型机电系统(mems)技术的迅速发展,基于传感器的人体步态分析得到了飞速发展。通过佩戴mems设备可以获得佩戴位置的惯性数据,这种方法重复性好,性能稳定、系统轻便小巧、不妨碍人体步行动作等。现有的基于惯性传感器的人体步态分析方法都使用零速率更新算法,而站立相检测是零速率更新算法的基础,也是划分人体下肢运动周期作为动作识别的数据窗口的关键,准确检测站立相是抑制导航参数和步态空间参数的计算累积误差的关键,所以准确检测站立相是行人导航、步态分析和人体下肢动作识别等领域的关键问题。
三、
技术实现要素:
4.为解决现有的基于固定阈值的站立相检测方法在多运动模式并存情况下的检测性能下降的问题,本发明提出了一种基于惯性传感器的人体足部运动站立相检测方法,此方法不仅适用于单一运动模式站立相检测,而且适用于多运动模式并存情况下站立相检测,同时提高零速率更新算法的准确性。
5.本发明提供了一种基于惯性传感器的人体足部运动站立相检测方法,其包括以下步骤:
6.(1)步态信号采集,通过足部(包括鞋)安装的惯性传感器,采集人体足部的三轴比力信号a
k
(a
kx
,a
ky
,a
kz
)和三轴角速度信号ω
k
(ω
kx
,ω
ky
,ω
kz
),其中t
k
(k=1,2,
…
,m)表示采样时刻;
7.(2)提取足跟离地参考点时间t
hor
和足跟着地参考点时间t
hsr
,将足部运动划分为低动态和高动态两种情况分别进行人体足部运动站立相检测。
8.所述步骤(2)中,足跟离地参考点时间t
hor
和足跟着地参考点时间t
hsr
的提取包括以下步骤:
9.(2.1)根据人体步态运动特征的经验值选择比力信号检测阈值a
hor
,当实际检测的比力信号模值‖a
k
‖曲线处于上升沿时,将穿过a
hor
阈值线的时刻记作足跟离地参考点时间t
hor
,所述比力信号模值‖a
k
‖的计算公式为:
10.(2.2)在足跟离地参考点时间t
hor
至t
hor
+δt
hs
时间内,不做足跟着地参考点检测,其中δt
hs
是时间阈值,当t>(t
hor
+δt
hs
)时,启动足跟着地参考点时间检测,当实际检测的比力信号模值‖a
k
‖曲线处于下降阶段,将穿过a
hsr
阈值线的时刻记作足跟着地参考点时间t
hsr
,所述时间阈值δt
hs
能够区分一个步态周期内的足跟着地点和初始离地点,同时小于最短的步态周期,阈值a
hsr
是根据人体运动学得到经验值,一般情况下:a
hsr
>g,g为重力加速度;
11.此外,所述步骤(2)中,足部运动动态水平划分包括以下步骤:
12.(2.3)计算足跟着地参考时间段内统计量t
k
的最小值t
min
,参考时间段指t
hsr
时刻至t
hsr
+δt
hstd
时刻,t
k
表示的是一个处理窗口内a
k
和ω
k
的统计量。
13.其计算公式为:
[0014][0015]
其中n为统计量计算窗口内的采样点数,k表示第k次采样,在足跟着地参考时间点t
hsr
至t
hsr
+δt
hstd
时间内统计量t
k
的最小值即为t
min
,其中δt
hstd
经验确定,一般小于最短的步态周期;
[0016]
(2.4)根据阈值t
l
划分运动动态水平,阈值t
l
是通过佩戴惯性传感器按照标准的测试动作检测获得,一般取0.5~1.5之间;当α*t
min
≤t
l
时,认为此时足部运动的动态水平为低动态;当α*t
min
>t
l
时,认为此时足部运动的动态水平为高动态,其中系数α的取值在4~9之间;
[0017]
所述步骤(2)中,不同运动水平下的站立相检测包括以下步骤:
[0018]
(2.5)当足部运动的动态水平为低动态时,从足跟着地参考点时间t
hsr
开始判断:
[0019]
当统计量t
k
在δt
ls
时间内满足:t
k
<t
l
时,将满足此条件的第一个时间点记为t
a
;
[0020]
当统计量t
k
在δt
ls
时间内满足:t
k
≥t
l
时,将满足此条件的第一个时间点记为t
b
;
[0021]
其中时间阈值δt
ls
用来滤除低动态运动下过短的站立相和摆动相,t
a
‑
t
b
这段时间所对应的步态运动的相位就认为是低动态运动的站立相;
[0022]
(2.6)当足部运动的动态水平为高动态时,阈值t
h
的计算公式为:t
h
=β*t
min
,其中系数β的取值在4~9之间,从足跟着地参考点时间t
hsr
开始判断:
[0023]
当统计量t
k
满足:t
k
<t
h
时,将满足此条件的第一个时间点记为t
a
;
[0024]
当统计量t
k
满足:t
k
≥t
h
时,将满足此条件的第一个时间点记为t
b
;
[0025]
t
a
‑
t
b
这段时间所对应的步态运动的相位就认为是高动态运动的站立相。
[0026]
本发明提供的一种基于惯性传感器的人体足部运动站立相检测方法,与现有的站立相检测方法相比具有以下优点:
[0027]
1.提出一种检测足跟着地参考点的新方法。该方法用比力信号模值进行检测,避免了惯性传感器安装和人体运动方向对检测的影响。同时,这个检测方法仅在摆动后期检测足跟着地参考点,从而放宽了对足跟着地参考点时间检测阈值a
hsr
选择的限制,并使得该方法适合多种运动模式并存情况下的足跟着地参考点检测。
[0028]
2.提出一种自适应调节站立相检测的统计量阈值的新方法。该方法利用站立相前后统计量的局部特点检测站立相,不需要确定不同运动下统计量阈值的实验和复杂的曲线拟合过程。
[0029]
3.所提出的站立相检测方法可以有效地检测出水平步行、后退、侧步、上楼梯步行、下楼梯步行、水平跑步、上楼梯跑步和下楼梯跑步等多种人体运动模式下的站立相。
四、附图说明
[0030]
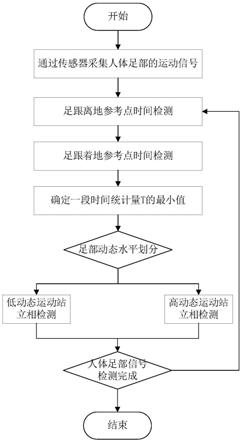
图1为本发明实施例基于惯性传感器的人体足部运动站立相检测方法实现的流程图;
[0031]
图2为本发明实施例中传感器安装示意图;
[0032]
图3为足跟离地参考点时间检测和足跟着地参考点时间检测示意图;
[0033]
图4为t
min
计算示意图。
五、具体实施方式
[0034]
下面结合附图和实施例对本发明进行详细的描述。
[0035]
图1为本发明实施例提供的基于惯性传感器的人体足部运动站立相检测方法的实现流程图,图2为本发明实施例中传感器安装示意图,将传感器安装到鞋面上。
[0036]
(1)通过足部(包括鞋)安装的惯性传感器,以200hz的采样频率采集人体足部的运动信号;
[0037]
其中,所述运动信号包括三轴比力信号a
k
(a
kx
,a
ky
,a
kz
)和三轴角速度信号ω
k
(ω
kx
,ω
ky
,ω
kz
),t
k
(k=1,2,
…
,m)表示采样时刻。用阈值法检测站立相,这种方法只与运动比力信号和角速度信号的大小有关,而与运动过程中比力信号和角速度信号的变化方向无关,所以利用比力信号的模值来检测站立相,按照以下公式计算比力信号的模值:
[0038]
(2)提取足跟离地参考点时间t
hor
和足跟着地参考点时间t
hsr
,将足部运动划分为低动态和高动态两种情况分别进行人体足部运动站立相检测。
[0039]
图3为足跟离地参考点时间检测和足跟着地参考点时间检测示意图。图3曲线为人体足部运动的一段比力信号模值‖a
k
‖曲线,由于人类在行走时,下肢呈现一种典型的节律运动,足部运动的比力信号模值‖a
k
‖曲线也随之呈现周期性规律,利用在一个步态周期内,不同动态水平运动的比力模值具有相似波形的特点,可以用相同的方法检测不同动态水平运动的足跟离地参考点和足跟着地参考点,其中检测用到的阈值a
hor
和阈值a
hsr
是根据人体动力学得到的经验值。
[0040]
所述步骤(2)中,足跟离地参考点时间t
hor
和足跟着地参考点时间t
hsr
的提取包括以下步骤:
[0041]
(2.1)根据人体步态运动特征的经验值选择比力信号检测阈值a
hor
,当实际检测的比力信号模值‖a
k
‖曲线处于上升沿时,将穿过a
hor
阈值线的时刻记作足跟离地参考点时间t
hor
,所述比力信号模值‖a
k
‖的计算公式为:
[0042]
(2.2)在足跟离地参考点时间t
hor
至t
hor
+δt
hs
时间内,不做足跟着地参考点检测,其中δt
hs
是时间阈值,当t>(t
hor
+δt
hs
)时,启动足跟着地参考点时间检测,当实际检测的比力信号模值‖a
k
‖曲线处于下降阶段,将穿过a
hsr
阈值线的时刻记作足跟着地参考点时间t
hsr
,所述时间阈值δt
hs
能够区分一个步态周期内的足跟着地点和初始离地点,同时小于最
短的步态周期,阈值a
hsr
是根据人体运动学得到经验值,一般情况下:a
hsr
>g,g为重力加速度;
[0043]
所述步骤(2)中,足部运动动态水平的划分包括以下步骤:
[0044]
(2.3)计算足跟着地参考时间段内统计量t
k
的最小值t
min
,参考时间段指t
hsr
时刻至t
hsr
+δt
hstd
时刻,t
k
表示的是一个处理窗口内a
k
和ω
k
的统计量,其计算公式为:
[0045][0046]
图4是t
min
计算示意图,在t
hsr
至t
hsr
+δt
hstd
时间段内求t
k
的最小值;
[0047]
其中n为统计量计算窗口内的采样点数,k表示第k次采样,在足跟着地参考时间点t
hsr
至t
hsr
+δt
hstd
时间内统计量t
k
的最小值即为t
min
,其中δt
hstd
经验确定,一般小于最短的步态周期;
[0048]
(2.4)根据阈值t
l
划分运动动态水平,阈值t
l
是通过佩戴惯性传感器按照标准的测试动作检测获得,这里取为1.2;当α*t
min
≤t
l
时,认为此时足部运动的动态水平为低动态;当α*t
min
>t
l
时,认为此时足部运动的动态水平为高动态,其中系数α的取为6;
[0049]
所述步骤(2)中,不同运动水平下的站立相检测包括以下步骤:
[0050]
(2.5)当足部运动的动态水平为低动态时,从足跟着地参考点时间t
hsr
开始判断:
[0051]
当统计量t
k
在δt
ls
时间内满足:t
k
<t
l
时,将满足此条件的第一个时间点记为t
a
;
[0052]
当统计量t
k
在δt
ls
时间内满足:t
k
≥t
l
时,将满足此条件的第一个时间点记为t
b
;
[0053]
其中时间阈值δt
ls
用来滤除低动态运动下过短的站立相和摆动相,t
a
‑
t
b
这段时间所对应的步态运动的相位就认为是低动态运动的站立相;
[0054]
(2.6)当足部运动的动态水平为高动态时,阈值t
h
的计算公式为:t
h
=β*t
min
,其中系数β的取值为6,从足跟着地参考点时间t
hsr
开始判断:
[0055]
当统计量t
k
满足:t
k
<t
h
时,将满足此条件的第一个时间点记为t
a
;
[0056]
当统计量t
k
满足:t
k
≥t
h
时,将满足此条件的第一个时间点记为t
b
;
[0057]
t
a
‑
t
b
这段时间所对应的步态运动的相位就认为是高动态运动的站立相。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1