一种电凝钳的制作方法
1.本发明涉及电凝钳技术领域,具体地指一种电凝钳。
背景技术:
2.在腹腔镜下进行临床手术时,虽然创伤较小,但手术过程难免会切割到血管,出现局部出血,用传统的线扎阻血方法在腹腔镜手术中就不是很适用,因此在临床当中应用电凝止血的方法被广泛采用。电凝用于外科止血起源很早,用于手术的电流为高频电流(频率每秒数千周到2兆周以上)。应用高频电流,即使电压高达数千伏,亦可安全通过人体,不引起神经或肌肉反应。通过高频电流的热效应,使血管壁脱水皱缩、血管内血液凝固,并使血管与血凝块互融为一体,达到有效止血目的。
3.但是现有的双极电凝钳在使用时,电凝钳操作角度受限,在复杂腔道情况下使用困难,会造成较大的组织损伤。
技术实现要素:
4.本发明的目的就是要解决上述背景技术的不足,提供一种头部可变角度大、操作方便的电凝钳。
5.为实现此目的,本发明所设计的电凝钳,包括钳头;与钳头连接、通过轴向移动驱动钳头开闭的钳杆和与钳杆连接、驱动钳杆轴向移动的钳柄,其特征在于:它还包括手柄,所述手柄的前端连接有手柄管,所述手柄管包括后端与所述手柄固定的硬管段、与所述硬管段前端同轴固定的可弯曲段和与所述可弯曲段前端同轴固定、硬质的固定轴段,所述钳头可转动地同轴连接于所述固定轴段的前端;所述手柄内设置有驱动所述钳头绕所述固定轴段旋转的旋转驱动机构和驱动所述可弯曲段弯曲的弯曲驱动机构,所述钳头与所述手柄之间连接有导电线路。
6.进一步的,所述钳头包括钳臂基座、铰接连接于所述钳臂基座内的第一铰接钳臂、固定于所述第一铰接钳臂内的钳臂绝缘片和铰接连接于所述钳臂绝缘片内的第二铰接钳臂,所述第一铰接钳臂的前端内侧表面和所述第二铰接钳臂的前端内侧表面上分别设置有相互咬合的锯齿,所述钳臂基座同轴转动连接于所述固定轴段的前端;
7.所述钳杆包括与所述第二铰接钳臂的后端固定的拉杆和一端同轴固定于所述拉杆内的驱动绳,所述驱动绳的另一端连接所述钳柄。
8.进一步的,所述手柄内设置有使所述驱动绳轴向前后移动的前后驱动机构,其包括与所述手柄管同轴、设置于所述手柄内的套管,所述驱动绳的另一端固定于所述套管内,所述钳柄的顶端铰接连接于所述手柄内,所述套管上同轴固定有驱动环,所述钳柄上固定有与所述驱动环配合的驱动块。
9.进一步的,所述套管包括与所述手柄管同轴、设置于所述手柄内的第一套管,所述第一套管的后端同轴固定于轴套内,所述轴套的后端同轴键连接有可相对于所述轴套前后移动的第二套管,所述驱动绳的另一端固定于所述第二套管内,所述驱动环同轴固定连接
于所述第二套管上。
10.进一步的,所述手柄内固定有与所述第二套管配合、使所述第二套管保持与所述轴套同轴状态的导向板。
11.进一步的,所述手柄与所述钳柄之间固定连接有钳柄复位弹簧。
12.进一步的,所述旋转驱动机构包括可转动的连接于所述手柄下部的旋转拨轮,所述旋转拨轮通过固定轴同轴固定有旋转驱动齿轮,所述手柄内设置有与所述旋转驱动齿轮啮合的旋转过渡齿轮,所述轴套表面同轴固定有与所述旋转过渡齿轮啮合的旋转从动齿轮,所述驱动绳同轴设置于所述弹簧管内,所述弹簧管的后端同轴固定有弹簧管套管,所述弹簧管套管后端穿过所述手柄管同轴固定于所述第一套管内,所述弹簧管的前端同轴固定于所述钳臂基座内。
13.进一步的,所述导电线路包括连接于所述第一铰接钳臂与所述第一套管之间的第一导电线路和连接于所述第二铰接钳臂与所述第二套管之间的第二导电线路;所述第一导电线路的一端连接所述第一铰接钳臂、穿过所述钳臂基座、所述弹簧管、所述弹簧管套管和与所述第一套管固定连接的第一导电弹片;所述第二导电线路的一端连接所述第二铰接钳臂,另一端穿过所述拉杆、所述驱动绳、和固定于所述第二套管上的第二导电弹片。
14.进一步的,所述弯曲驱动机构包括至少两根钢丝,所述钢丝的前端固定于所述可弯曲段的前端左右两侧,所述钢丝的后端固定于钢丝轮上,所述手柄内设置有与所述钢丝轮同轴固定的钢丝轮轴,所述钢丝轮轴上固定有弯曲从动齿轮,所述手柄上设置有驱动所述弯曲从动齿轮转动的弯曲拨轮机构。
15.更进一步的,所述弯曲拨轮机构包括可转动的连接于所述手柄侧部的弯曲驱动拨轮、所述弯曲驱动拨轮通过固定轴同轴连接有与所述弯曲从动齿轮啮合的弯曲主动齿轮,所述弯曲主动齿轮与所述弯曲驱动拨轮之间设置有自锁弹片,所述弯曲驱动拨轮的固定轴内端固定有用于限制所述弯曲主动齿轮位置的限位螺栓。
16.本发明的有益效果是:通过手柄管前段的可弯曲段的双向弯曲和钳头的旋转使电凝钳具有多种操作角度,可同时实现手柄管转弯、头部旋转和夹取功能,在复杂腔道情况下使用方便,不会造成较大的组织损伤。旋转拨轮、弯曲驱动拨轮和钳柄设置在方便人单手操作的相对位置上,在保证操作精度的同时,也使人工操作更为方便。夹钳的开合动作可实现自锁,需手动操作解除,防止了手术中的误操作,降低了手术强度。
附图说明
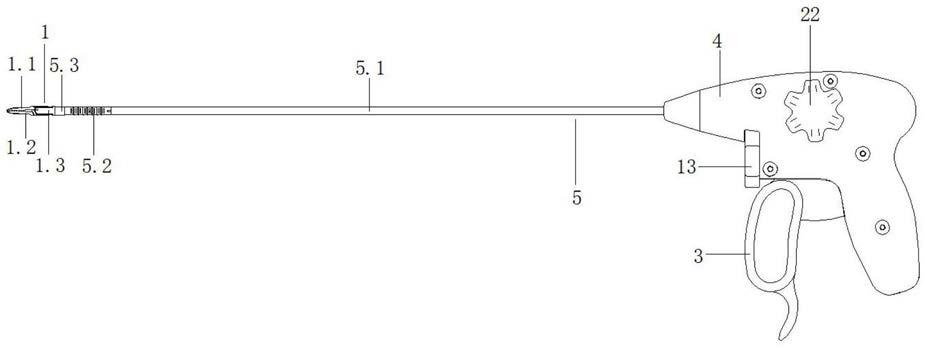
17.图1为本发明中电凝钳的主视图;
18.图2为本发明中电凝钳的后视图;
19.图3为本发明中电凝钳的右视图;
20.图4为本发明中手柄的内部视图;
21.图5为图4中a
‑
a剖视图;
22.图6为本发明中中钳头部分的轴向剖视图;
23.其中,1—钳头(1.1—第一铰接钳臂,1.2—第二铰接钳臂,1.3—钳臂基座),2—钳杆(2.1—拉杆,2.2—驱动绳),3—钳柄,4—手柄,5—手柄管(5.1—硬管段,5.2—可弯曲段,5.3—固定轴段),6—钳臂绝缘片,7—驱动环,8—驱动块,9—第一套管,10—轴套,11—
第二套管,12—导向板,13—旋转拨轮,14—旋转驱动齿轮,15—旋转过渡齿轮,16—旋转从动齿轮,17—弹簧管,18—弹簧管套管,19—第一导电弹片,20—第二导电弹片,21—弯曲从动齿轮,22—弯曲驱动拨轮,23—钳柄复位弹簧,24—钢丝轮,25—钢丝轮轴,26—弯曲主动齿轮,27—自锁弹片,28—蛇骨管,29—限位螺栓,30—基座绝缘片。
具体实施方式
24.下面结合附图和具体实施例对本发明作进一步的详细说明。
25.如图1—6所示的电凝钳,包括手柄4、钳头1;与钳头1连接、通过轴向移动驱动钳头1开闭的钳杆2和与钳杆2连接、驱动钳杆2轴向移动的钳柄3,手柄4的前端连接有手柄管5,手柄管5包括后端与手柄4固定的硬管段5.1、与硬管段5.1前端同轴固定的可弯曲段5.2和与可弯曲段5.2前端同轴固定、硬质的固定轴段5.3,钳头1可转动地同轴连接于固定轴段5.3的前端;手柄4内设置有驱动钳头1绕固定轴段5.3旋转的旋转驱动机构和驱动可弯曲段5.2弯曲的弯曲驱动机构,钳头1与手柄4之间连接有导电线路。
26.如图6所示,钳头1包括钳臂基座1.3、铰接连接于钳臂基座1.3内的第一铰接钳臂1.1、固定于第一铰接钳臂1.1内的钳臂绝缘片6和铰接连接于钳臂绝缘片6内的第二铰接钳臂1.2,钳臂基座1.3内固定有基座绝缘片30,第一铰接钳臂1.1的前端内侧表面和第二铰接钳臂1.2的前端内侧表面上分别设置有相互咬合的锯齿,钳臂基座1.3同轴转动连接于固定轴段5.3的前端;钳杆2包括与第二铰接钳臂1.2的后端固定的拉杆2.1和一端同轴固定于拉杆2.1内的驱动绳2.2,驱动绳2.2的另一端连接钳柄3。
27.如图4—5所示,手柄4内设置有使驱动绳2.2轴向前后移动的前后驱动机构,其包括与手柄管5同轴、设置于手柄4内的套管,驱动绳2.2的另一端固定于套管内,钳柄3的顶端铰接连接于手柄4内,套管上同轴固定有驱动环7,钳柄3上固定有与驱动环7配合的驱动块8。套管包括与手柄管5同轴、设置于手柄4内的第一套管9,第一套管9的后端同轴固定于轴套10内,轴套10的后端同轴键连接有可相对于轴套10前后移动的第二套管11,驱动绳2.2的另一端固定于第二套管11内,驱动环7同轴固定连接于第二套管11上。手柄4内固定有与第二套管11配合、使第二套管11保持与轴套10同轴状态的导向板12。手柄4与钳柄3之间固定连接有钳柄复位弹簧23。
28.如图4—5所示,旋转驱动机构包括可转动的连接于手柄4下部的旋转拨轮13,旋转拨轮13通过固定轴同轴固定有旋转驱动齿轮14,手柄4内设置有与旋转驱动齿轮14啮合的旋转过渡齿轮15,轴套10表面同轴固定有与旋转过渡齿轮15啮合的旋转从动齿轮16,驱动绳2.2同轴设置于弹簧管17内,弹簧管17的后端同轴固定有弹簧管套管18,弹簧管套管18后端穿过手柄管5同轴固定于第一套管9内,弹簧管17的前端同轴固定于钳臂基座1.3内。
29.可弯曲段5.2包括蛇骨管28,所述蛇骨管28的前端同轴固定于固定轴段5.3上,后端同轴固定于硬管段5.1上,弹簧管9和弹簧管套管18的前端均同轴固定于所述蛇骨管28内。弯曲驱动机构包括至少两根钢丝,钢丝的前端固定于可弯曲段5.2的蛇骨管28前端左右两侧,钢丝的后端固定于钢丝轮24上,手柄4内设置有与钢丝轮24同轴固定的钢丝轮轴25,钢丝轮轴25上固定有弯曲从动齿轮21,手柄4上设置有驱动弯曲从动齿轮21转动的弯曲拨轮机构。弯曲拨轮机构包括可转动的连接于手柄4侧部的弯曲驱动拨轮22、弯曲驱动拨轮22通过固定轴同轴连接有与弯曲从动齿轮21啮合的弯曲主动齿轮26,弯曲主动齿轮26与弯曲
驱动拨轮22之间设置有自锁弹片27,弯曲驱动拨轮22的固定轴内端固定有用于限制弯曲主动齿轮26位置的限位螺栓29。
30.如图4—6所示,导电线路包括连接于第一铰接钳臂1.1与第一套管9之间的第一导电线路和连接于第二铰接钳臂1.2与第二套管11之间的第二导电线路;第一导电线路的一端连接第一铰接钳臂1.1、穿过钳臂基座1.3、弹簧管17、弹簧管套管18和与第一套管9固定连接的第一导电弹片19;第二导电线路的一端连接第二铰接钳臂1.2,另一端穿过拉杆2.1、驱动绳2.2、和固定于第二套管11上的第二导电弹片20。
31.本发明用于在临床手术中对人体软组织进行切割凝固,可同时实现三组动作:手柄管5双向弯曲、钳头1旋转和钳头1开合。控制钳头1旋转的旋转拨轮13、控制手柄管5双向弯曲的弯曲驱动拨轮22和控制钳头1开合的钳柄3设置在方便人单手操作的相对位置上,在实际操作时,医生可单手握持手柄4,用食指驱动旋转拨轮13转动控制钳头1旋转,用拇指驱动弯曲驱动拨轮22转动控制手柄管5双向弯曲,用其余三指拉动钳柄3控制钳头1开合。合理设置的拨轮及钳柄3的相对位置,可在保证操作精度的同时,使得人工操作更为方便。
32.手柄管5双向弯曲结构:旋转弯曲驱动拨轮22,通过弯曲主动齿轮26驱动弯曲从动齿轮21转动,由弯曲从动齿轮21驱动钢丝轮24转动,两根钢丝的一端分别与钢丝轮24的两侧固定,带动蛇骨28进行双向弯曲,两根钢丝27的另一端分别穿过蛇骨管28两侧孔位,与蛇骨管28的头部固定。弯曲主动齿轮26通过自锁弹片27的结构实现自锁,控制手柄管5的弯曲角度。
33.钳头1旋转结构:拨动旋转拨轮13,旋转驱动齿轮14通过旋转过渡齿轮15将动力传递至旋转从动齿轮16,从而驱动轴套10旋转,由于轴套10与弹簧管套管18和第一套管9固定,因此可通过轴套10驱动弹簧管套管18旋转,由弹簧管套管18驱动弹簧管17和钳臂基座1.3绕固定轴段5.3旋转。
34.钳头1开合动作:钳柄3绕轴转动,推动第二套管11横向移动,带动驱动绳2.2横向移动,驱动绳2.2带动拉杆2.1,拉杆2.1带动第一铰接钳臂1.1和第二铰接钳臂1.2实现闭合动作。钳柄复位弹簧23推动第二套管11复位,实现通过驱动绳2.2、拉杆2.1使第一铰接钳臂1.1和第二铰接钳臂1.2实现张开动作,钳头1处于常开状态,此时电路不连通,钳头1不导电。
35.本发明中内部线路能通过绝缘套与钳头1连接,实现电凝操作,除钳头1外其余部分不导电。在此基础上,还可设置注水接头和注水管对电凝处进行冲水降温,防止电凝温度过高,同时冲洗电凝处血液,以保证电凝钳的操作视野清晰。
36.以上所述,仅是本发明的较佳实施例而已,并非对本发明的结构做任何形式上的限制。凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1