一种模块化动力假肢
1.本发明涉及步行辅助工具,尤其涉及一种模块化动力假肢。
背景技术:
2.2006年的全国人口普查显示我国现有残疾人8296万人,其中肢体残疾人数约为2412万人。其中每年大约一半多下肢截肢患者经历二次摔倒。被动假肢穿戴截肢者半数以上有跌倒恐惧,60%截肢者无法在非结构化环境行走。步态的不对称性和关节负荷增加常常导致疼痛,跌倒和其它伤害的风险的增加,严重降低了截肢患者的活动能力和生活质量。另据报道,由于肥胖症和糖尿病的发病率不断上升,预计到2050年,截肢的人数就将翻两番,因此急需智能化主动假肢的得到开发应用。
3.目前,传统假肢绝大多数为被动假肢,不能为截肢患者提供主动力,只能辅助截肢患者完成正常行走。传统踝关节假肢穿戴者在平坦路面行走时,消耗的能量需要比健康人多30%,而穿戴传统膝关节假肢的患者在平坦路面行走时消耗的能量则比健康人高60%,假肢侧的髋部力矩高达正常人的3倍之多。然而,现有的主动假肢多处于研发阶段,价格昂贵,如mit研发的小腿动力假肢高达10万美元,普通截肢患者难以承担。此外,传统假肢只适应于平坦路面,但生活中,截肢患者需要面对各种不同的路况。传统假肢不具有与截肢患者动作协调的功能。这些传统假肢的局限性很大程度上限制了截肢患者的活动空间和使用体验,影响了截肢患者穿戴假肢时候的生活质量。
4.近年来,主动假肢的发展取得了很大的进展,例如。在提高人体运动能力、降低行走新陈代谢等方面展现了有益的结果,但仍然存在许多挑战。例如,装置往往笨重,限制了大扭矩和电池寿命;驱动结构复杂、可靠性差,元器件的可更换新差和巨额的维护成本等。这大大限制了用户充分利用主动假肢的能力,因此,现有动力假肢很难进行商业化。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是现有的传统假肢局限性大于人体不协调,而动力假肢价格昂贵、装置笨重、驱动结构辅助等问题。本发明的一种模块化动力假肢,其驱动和传动模块设计紧凑,减少了动力假肢质量;模块化的设计扩大了假肢适应不同用户群体(例如,不同体重、年龄关节需求力矩和尺寸不同,只需通过定制膝关节传动减速模块或踝关节减速模块实现),同时能够保护相应昂贵的组件,减少假肢使用难度和后期维护成本。本发明有望实现动力假肢的商业化,恢复截肢患者尤其是大腿截肢患者主动行走能力,大大提高截肢患者的生活质量。
6.为实现上述目的,本发明提供了一种模块化动力假肢,包括关节电机驱动模块、膝关节传动减速模块、控制器模块、踝关节传动减速模块,脚足模块和接受腔连接件模块;接受腔连接件模块、膝关节传动减速模块、控制器模块、踝关节传动减速模块和脚足模块依次从上至下排列并相互连接,关节电机驱动模块包括第一关节电机驱动模块和第二关节电机驱动模块,第一关节驱动模块与膝关节传动减速模块连接组成膝驱动关节,第二关节电机
驱动模块与踝关节传动减速模块连接组成踝驱动关节。
7.进一步地,控制模块分别与第一关节驱动模块和第二关节驱动模块的一端连接,并分别控制第一关节驱动模块和第二关节驱动模块运动。
8.进一步地,脚足模块与踝关节传动减速模块通过销轴连接,实现脚足与踝关节转动。
9.进一步地,接受腔连接件模块设置为两侧与膝驱动关节连接,接受腔连接件的上端设置有四棱柱连接板,用于与接受腔连接。
10.进一步地,第一关节驱动模块包括旋转编码器、电机右盖、电机左盖、电机定子、电机转子、编码器磁块、转子右压盖和转子左压盖,旋转编码器用于记录电机转动圈速,电机右盖和电机左盖用于压紧电机定子,转子右压盖和转子左压盖用于压紧电机转子;转子右压盖和转子左压盖通过轴承分别与电机右盖和电机左盖固定,形成旋关节。
11.进一步地,膝关节传动减速模块包括谐波端盖、动力输出端盖、谐波输入轴和谐波组件;谐波组件通过螺钉安装于谐波端盖上,谐波端盖通过螺钉与电机左盖连接固定,谐波输入轴设置为插入电机右盖和电机左盖中空结构中,并且通过键连接,用于传递电机扭矩。
12.进一步地,控制器模块包括主控制器、电机驱动器、控制器连接外壳和供电接头;控制器连接外壳的上端通过螺钉与膝驱动关节的两侧固定,控制器连接外壳的下端通过螺钉安装于电机驱动器上;供电接头通过电线与主控制器和电机驱动器连接,为主控制器和电机驱动器提供动力电源。
13.进一步地,踝关节传动减速模块包括第一惯性传感器、传感器连接板、模拟信号放大器、滚珠丝杆组件、丝杠螺母连接件、滑动导轨、踝关节传动减速模块外壳、弹簧、拉杆和踝关节编码器;第一惯性传感器和模拟信号放大器通过传感器连接板固定于踝关节传动减速模块外壳上;滚珠丝杆组件连接关节电机驱动模块,提供动力输出,并通过丝杠螺母和丝杠螺母连接件和拉杆把电机旋转运动传递给踝关节;滑动导轨用于抵消拉杆对滚珠丝杠组件的径向力或力矩,滑动导轨包括滑块和导轨,滑块通过丝杠螺母连接件连接丝杠螺母,导轨被螺钉固定在踝关节传动减速模块外壳上;弹簧用于提高踝关节柔顺性,弹簧的一端通过螺钉锁紧在丝杠螺母连接件上,另一端悬空;踝关节编码器固定于踝关节传动减速模块外壳上,编码器磁铁固定于脚足模块的踝关节连接块上,用于测量踝关节转角;拉杆的一端与丝杠螺母连接件连接,另一端与踝关节连接块连接。
14.进一步地,脚足模块包括第二惯性传感器、踝关节连接块、销轴、六维力传感器、脚板垫块以及脚板;脚足模块上的第二惯性传感器和六维力传感器配合使用,用于测量脚姿态和足底与底面的交互力;六维力传感器的下端通过螺钉与脚板垫块连接,上端通过螺钉连接踝关节连接块,惯性传感器安装于脚板垫块上,脚板垫块通过螺钉连接在脚板上,销轴固定于踝关节连接块的后端,用于固定拉杆。
15.技术效果
16.本发明的一种模块化动力假肢,可为截肢者行走时提供膝关节和踝关节主动力,便于恢复截肢者行走对称性,可实现多种路况环境下的自然行走,有望使智能动力假肢得到正在实际应用。
17.本发明提出一种模块化动力假肢,驱动和传动模块设计紧凑,减少了动力假肢质量;模块化的设计扩大了假肢适应不同用户群体(例如,不同体重、年龄关节需求力矩和尺
寸不同,只需通过定制膝关节传动减速模块或踝关节减速模块实现),同时能够保护相应昂贵的组件,减少假肢使用难度和后期维护成本。本发明的一种模块化动力假肢有望实现动力假肢的商业化,恢复截肢患者尤其是大腿截肢患者主动行走能力,大大提高截肢患者的生活质量。
18.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
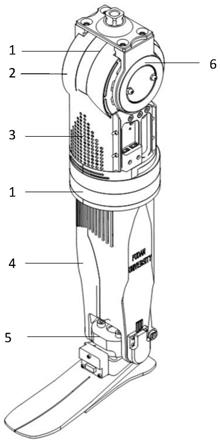
19.图1是本发明的一个较佳实施例的一种模块化动力假肢的示意图;
20.图2是本发明的一个较佳实施例的一种模块化动力假肢的膝驱动关节的示意图;
21.图3是本发明的一个较佳实施例的一种模块化动力假肢的膝驱动关节的组成结构示意图;
22.图4是本发明的一个较佳实施例的一种模块化动力假肢的示意图;
23.图5是本发明的一个较佳实施例的一种模块化动力假肢的脚足模块的示意图。
具体实施方式
24.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.以下描述中,为了说明而不是为了限定,提出了诸如特定内部程序、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
26.如图1所示,本发明一较佳实施例提供了一种模块化动力假肢,包括关节电机驱动模块1、膝关节传动减速模块2、控制器模块3、踝关节传动减速模块4、脚足模块5、接受腔连接件模块6。关节电机驱动模块1安装于膝关节与膝关节传动减速模块2连接组成膝驱动关节,或安装于膝下与踝关节传动减速模块4连接组成踝驱动关节。关节驱动模块具有可主动控制的电机,即可以通过控制电机进行假肢控制,为假肢提供动力。本关节电机驱动模块采用无框电机进行扁平设计,以可以同时布置膝关节和踝关节,为关节其提供动力。为方便区分,本实施例将关节驱动模块分为第一关节电机驱动模块和第二关节电机驱动模块,其中,第一关节驱动模块与膝关节传动减速模块连接组成膝驱动关节,第二关节电机驱动模块与踝关节传动减速模块连接组成踝驱动关节;其中第一关节电机驱动模块与第二关节电机驱动模块的结构完全一致,本实施例中,即是关节驱动模块有2个,一个用于与膝关节传动减速模块连接组成膝驱动关节,另一个用于与踝关节传动减速模块连接组成踝驱动关节。
27.而膝关节传动减速模块,其由谐波减速器和相应的连接件组成,用于与关节电机驱动模块连接,实现膝关节力矩放大。踝关节传动减速模块,则是利用滚珠丝杠进行力矩传递,上端与关节电机驱动模块连接,实现踝关节力矩放大,同时,上端布置电机,该电机用于关节电机驱动模块的运行,有利于减少假肢膝关节转动惯量。
28.控制器模块3上下端分别连接膝驱动关节和关节电机驱动模块1一端,内部安装膝
关节和踝关节驱动器及其相应的控制器。控制器模块,放置膝关节和踝关节电机驱动器和假肢控制器,为假肢的控制大脑,同时控制器模块连接膝关节和踝关节。
29.脚足模块5与踝关节传动减速模块4通过销轴连接,实现脚与小腿的踝关节转动。具体的,脚足模块是由脚板和相应的传感器组成,与踝关节传动减速模块,构成假肢踝关节。同时利用相应的传感器可实现截肢者行走步态预测和底面交互力感知。
30.接受腔连接件模块6左右连接板连接膝驱动关节,上端连接四棱柱连接板,可用于连接接受腔,便于截肢者穿戴。
31.如图2所示,膝驱动关节由关节电机驱动模块1和膝关节传动减速模块2通过螺钉连接,同时,关节电机驱动模块1带有旋转编码器101。
32.如图3,关节电机驱动模块1由旋转编码器101、电机右盖102、电机左盖103、电机定子104、电机转子105、编码器磁块106、转子右压盖107和转子左压盖108组成。旋转编码器101用于记录电机转动圈速,电机右盖102和电机左盖103用于压紧电机定子104;转子右压盖107和转子左压盖108用于压紧电机转子105。膝关节传动减速模块2由谐波端盖201、动力输出端盖202、谐波输入轴203和谐波组件204组成。谐波组件通过螺钉安装于谐波端盖201上。谐波端盖201可通过螺钉与电机左盖103连接固定,同时,谐波输入轴203可插入电机右盖102和电机左盖103中空结构中,通过键连接,用于传递电机扭矩。
33.如图4所示,控制器模块3上安装有主控制器301、电机驱动器302、控制器连接外壳303和供电接头304组成。控制器连接外壳303上端通过螺钉与膝驱动关节固定,下端通过螺钉安装于电机驱动模块上。踝关节传动减速模块4由惯性传感器401、传感器连接板402、模拟信号放大器403、滚珠丝杆组件404、丝杠螺母连接件405、滑动导轨406、踝关节传动减速模块外壳407、弹簧408、拉杆409和踝关节编码器410组成。由惯性传感器401用于测量小腿姿态,模拟信号放大器403用于接受模拟信号(如脚足模块上的力传感器)并放大,传递给主控制器301。惯性传感器401和模拟信号放大器403通过传感器连接板402固定于踝关节传动减速模块外壳407上。滚珠丝杆组件404连接关节电机驱动模块1,提供动力输出,并通过丝杠螺母和丝杠螺母连接件405和拉杆409把电机旋转运动传递给踝关节,此处的踝关节指的是踝关节传动减速模块外壳407与踝关节连接块502通过轴承连接形成的旋转关节。滑动导轨406用于抵消拉杆对滚珠丝杠组件404的径向力或力矩,弹簧408用于提高踝关节柔顺性。踝关节编码器410固定于踝关节传动减速模块外壳407上,编码器磁铁固定于踝关节连接块502上,用于测量踝关节转角。脚足模块5由惯性传感器501、踝关节连接块502、销轴503、六维力传感器504以及脚板505组成。脚足模块5上惯性传感器501和六维力传感器504配合使用,用于测量脚姿态和足底与底面的交互力,脚足模块上惯性传感器和六维力传感器安装与设计用于假肢姿态测量和足底与地面的交互力测量,易于实现动力假肢的柔顺性智能控制。
34.如图5所示,脚足模块上惯性传感器和六维力传感器安装结构方式为关键结构之一。脚足模块上六维力传感器504下端通过螺钉连接于脚板垫块506上,脚板垫块506通过螺钉连接在脚板505上。六维力传感器504上端通过螺钉连接踝关节连接块502上,惯性传感器501通过螺钉安装于脚板垫块506上。踝关节连接块502两端通过轴承安装于407上。通过此安装结构,六维力传感器504的坐标原点o1位于踝关节转动轴的中心,六维力传感器所测量的3维方向的力和力矩即为踝关节中心所受的3维方向的力和力矩,力矩可直接用于反馈控
制假肢踝关节。通过此安装结构,惯性传感器501的坐标原点o2位于六维力传感器504的坐标原点o1的一个坐标轴上,六维力传感器504的3维方向的力和力矩可通过惯性传感器501进行方位变换,用于计算投影于小腿的力和力矩,或用于测量脚板505与地面的交互力,这些力和力矩信息至关重要,例如便于研究基于交互力的假肢控制,利于行走舒适性的改善。
35.本发明实施例的一种模块化动力假肢是为实现假肢辅助截肢者行走,首先假肢编码器、惯性传感器和六维力传感器采集人体行走意图信息和人体行走步态信息,根据当前的行走意图和行走步态和基于的控制方法(如基于健侧的模仿控制、基于有限状态机的分相位阻抗控制,以及大腿残值摆动相位变量的控制等),控制器发送控制信号给膝关节和踝关节驱动器,驱动膝关节和踝关节动作。
36.本发明的一种模块化动力假肢,具有关节电机驱动模块、膝关节传动减速模块、踝关节传动减速模块、控制器模块、脚足模块和接受腔连接件模块等。关节电机驱动模块可装配于膝关节或踝关节为膝关节和踝关节提供动力。膝关节传动减速模块由谐波减速器、上外壳和下外壳组成,利用谐波传动最大好处是大扭矩传递下质量轻,其中谐波减速器减速比可根据人体质量和关节力矩需求不同进行选择。踝关节传动减速模块由滚珠丝杠组件、直线导轨和连杆结构组成,主要是利于关节电机驱动模块靠近膝关节布置,减少小腿摆动惯量,降低对关节电机需求,同时保证结构的紧凑。控制器模块用于放置假肢控制器及驱动器。接受腔连接件模块用于连接接受腔,便于截肢者穿戴。
37.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1