一种乳腺X光机的运动部件控制系统及其方法与流程
一种乳腺x光机的运动部件控制系统及其方法
技术领域
1.本发明涉及医疗器械技术领域,涉及一种乳腺x光机的运动部件控制系统以及应用该系统的控制方法,具体的,涉及一种乳腺x光机的承载台、压迫板等的控制方法及系统。
背景技术:
2.乳腺癌作为世界卫生组织确认的能够通过早发现早治疗降低死亡率的癌症之一,基于x射线的乳腺光机在乳腺疾病的应用方面越来越广泛。x射线是一种波长较短、能量较大的电磁波,且具有穿透性。当x射线穿过某些物质时,部分电磁波被吸收,x射线强度成一定指数关系衰减,不同的物质对x射线的吸收不同,未被吸收的x射线穿过物体后被探测器接收。探测器接收到不同强度的x射线,转换成数字信号,该信号送给计算机处理并重建图像,这就是数字乳腺x射线成像的原理。探测器接收到的信号强弱取决于乳腺体的横断面内组织的密度,密度较高的组织吸收的x射线较多,探测器得到的信号较弱,比如肿瘤、钙化组织等;密度较低的组织吸收的x射线较少,检测到的信号就较强,比如脂肪等组织。检测器接收到的信息显示出不同密度的乳腺阴影图像。根据阴影图像的对比,结合临床经验,较容易判断乳腺组织的是否存在异常。
3.患者在进行x射线拍照时,为了提高成像质量以及患者拍摄的舒适性,需要根据患者的高矮和乳房的特点调节乳腺x光机的运动部件,例如承载台的高低,压迫板也需要根据患者乳房情况调节。
4.另外,现有技术中的乳腺光机大多是通过有线连接,并且不能对乳腺x光机的运动部件进行远近控制,医护人员操作不方便,操控体验差。
技术实现要素:
5.为了克服现有技术的不足,本发明的目的在于提供一种乳腺x光机的运动部件控制系统及其方法,该系统和方法通过有线连接或者无线操控,对乳腺x光机的运动部件进行运动控制,控制调节方便,可以改善医护人员的操作体验。
6.为解决上述问题,本发明所采用的技术方案如下:
7.一种乳腺x光机的运动部件控制系统,包括:x射线单元,由高压发生器产生高频脉冲电压施加于x射线单元,促使x射线单元产生指定范围内的x射线;探测器单元,用于将接收到的x射线转换成影像数字信息,并进行图像优化处理和显示,以及图像分析和共享;脚闸控制单元,用于输出脚闸控制命令;运动控制单元,与脚闸控制单元之间进行有线通信或无线通信,用于接收脚闸控制指令,并向各个运动部件发出运动控制指令,以实现运动控制执行;运动部件单元,用于接收运动控制指令,以控制各个运动部件工作;曝光控制模块,分别与高压发生器、探测器单元、运动控制单元连接,以实现曝光控制。
8.进一步的方案是,所述x射线单元包括x射线球管模块以及准直器模块,所述x射线球管模块与高压发生器连接,由高压发生器产生高频脉冲电压,该电压经整流后施加于所述x射线球管模块,使得所述x射线球管模块产生x射线;所述准直器模块与所述x射线球管
模块连接,用于将x射线的视野约束到指定的范围内。
9.更进一步的方案是,所述探测器单元包括探测器板模块以及图像处理模块,所述探测器板模块用于将接收到的x射线转换成影像数字信息;所述图像处理模块用于获取所述探测器板模块输出的图像信息,并将该信息进行图像优化处理和显示,以及图像分析和共享。
10.更进一步的方案是,所述运动部件单元包括c型臂、压迫板模块以及承载台,所述运动控制单元根据脚闸控制命令向所述c型臂、压迫板模块以及承载台发送运动控制指令向,以控制所述c型臂、压迫板模块以及承载台工作。
11.更进一步的方案是,所述运动控制单元包括运动控制模块以及第一通信模块,所述脚闸控制单元包括脚闸控制模块以及第二通信模块,在所述第一通信模块与所述第二通信模块连接有通信方式模块。
12.更进一步的方案是,所述第一通信模块用于实现运动控制端通信转接,所述第二通信模块用于实现脚闸控制端通信转接,其中,所述通信方式模块包括有线通信和无线通信;所述运动控制模块基于所述第一通信模块接收所述脚闸控制模块的脚闸控制命令,以控制各个运动部件的移动;所述脚闸控制模块基于所述第二通信模块发出脚闸控制命令。
13.更进一步的方案是,所述运动控制模块包括第一处理器,所述脚闸控制模块包括第二处理器以及多个脚闸,所述第一通信模块为运动端无线转接板,所述第二通信模块为脚闸控制端无线转接板,通过检测所述第一处理器、第二处理器的io1端的电平信号来识别是否为无线通信,所述第一处理器的uart1端与所述运动端无线转接板的uart端连接,所述第二处理器的uart1端与所述脚闸控制端无线转接板的uart端连接,所述第一处理器的uart2端与所述第二处理器的uart2端连接,所述第一处理器的io2端接地,用于识别是否为有线通信,所述第二处理器的io2
‑
ion端分别接多个所述脚闸。
14.一种乳腺x光机的运动部件控制方法,应用于上述的乳腺x光机的运动部件控制系统,该方法包括以下步骤:选择脚闸控制通信方式,由运动控制单元检测是否为有线通信接入或无线通信接入,在确定通信方式后,由脚闸控制单元输出脚闸控制命令,运动控制单元根据该命令向各个运动部件发出运动控制指令,以实现运动控制执行;在调整好各个运动部件位置后,通过高压发生器产生高频脉冲电压施加于x射线单元产生指定范围内的x射线,该x射线经过压迫板模块穿过目标部位衰减,衰减的信号被探测器单元接收,获得影像数字信息,该信息进一步上传给图像处理模块,进行图像优化处理和显示,以及图像分析和共享。
15.更进一步的方案是,判断脚闸控制端是否为有线通信接入,若是,判断握手通信是否正常,若正常,则进入脚闸的有线通信模式,若确定不是有线通信接入,则进入无线通信检测状态,其中,无线通信检测状态包括运动控制端部分和脚闸控制端部分;检测脚闸控制端是否接入无线通信,若接入并握手通信正常,则进入脚闸无线通信模式。
16.更进一步的方案是,若握手通信为非正常,且通信连接超时,则进行脚闸通信故障报警;若通信连接未超时,则尝试有线通信和无线通信连接,直至通信成功。
17.更进一步的方案是,当系统上电初始化完成后,选择脚闸控制通信方式;通过主机检测是否为有线通信接入,即检测第一处理器的io2端是否为高或者低电平,当脚闸控制端为有线通信接入时,第二处理器拉低使得第一处理器的io2端由高电平被拉至低电平,从而
确定为有线通信接入;反之,若脚闸控制端没有有线通信接入时,则第一处理器的io2端默认为高电平;若检测到有线通信接入,则检测串口通信uart2端是否正常,若正常,则进入有线通信模式;若未检测到有线通信接入或者有线通信异常,则检测是否接入无线通信。
18.更进一步的方案是,无线通信的检测分为运动控制端部分和脚闸控制端部分,在检测是否接入无线通信时,检测第一处理器和第二处理器的io1端电平信号,若为低电平,则接入无线通信入;如检测第一处理器io1端电平信号,若为高电平,则确定没有无线转接板接入;若第一处理器io1端电平信号被运动端无线转接板拉低,则确定无线通信接入,开启无线通信测试,若无线通信测试正常,则进入无线通信模式;否则,若无线通信测试异常,则重复通信测试步骤,直到通信连接超时报告通信异常。
19.相比现有技术,本发明的有益效果在于:
20.(1)本发明提供的乳腺x光机的运动控制系统采用多种通信技术,即提出采用无线或者有线的通信方式,有利于用户根据应用场景选配,改善用户体验;
21.(2)本发明采用无线通信技术,消除布线,脚闸使用更加灵活,可以在检测室使用,也可以在控制室操作使用,应用场景更广泛;
22.(3)本发明采用有线和无线切换技术,使得通信方式更加智能,使用更加灵活;
23.(4)本发明提供一种运动控制系统通信机制及其切换方法,该方法能保证使用的可靠性和稳定性;
24.(5)本发明具体提供了用于乳腺x光机的运动控制系统的原理和工作流程,能有效实现远程控制;
25.(6)本发明的乳腺x光机运动控制系统兼容有线和无线的系统方案,有利于市场开拓。
26.下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
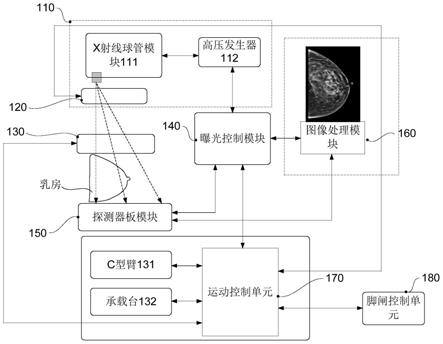
27.图1是本发明一种乳腺x光机的运动部件控制系统实施例的原理图。
28.图2是本发明一种乳腺x光机的运动部件控制系统实施例中关于运动控制单元与脚闸控制单元的原理图。
29.图3是本发明一种乳腺x光机的运动部件控制系统实施例中关于运动控制单元与脚闸控制单元的电路原理图。
30.图4是本发明一种乳腺x光机的运动部件控制系统实施例中数字乳腺x射线成像系统的结构示意图。
31.图5是本发明一种乳腺x光机的运动部件控制方法实施例中运动部件控制通信方法的控制流程图。
具体实施方式
32.一种乳腺x光机的运动部件控制系统实施例:
33.参见图1,一种乳腺x光机的运动部件控制系统,包括:
34.x射线单元110,由高压发生器112产生高频脉冲电压施加于x射线单元110,促使x射线单元110产生指定范围内的x射线。其中,x射线单元110包括x射线球管模块111以及准
直器模块120,x射线球管模块111与高压发生器112连接,由高压发生器112产生高频脉冲电压,该电压经整流后施加于x射线球管模块111,使得x射线球管模块111产生x射线;准直器模块120与x射线球管模块111连接,用于将x射线的视野约束到指定的范围内。
35.探测器单元,用于将接收到的x射线转换成影像数字信息,并进行图像优化处理和显示,以及图像分析和共享。其中,探测器单元包括探测器板模块150以及图像处理模块160,探测器板模块150用于将接收到的x射线转换成影像数字信息;图像处理模块160用于获取探测器板模块150输出的图像信息,并将该信息进行图像优化处理和显示,以及图像分析和共享。
36.脚闸控制单元180,用于输出脚闸控制命令。
37.运动控制单元170,与脚闸控制单元180之间进行有线通信或无线通信,用于接收脚闸控制指令,并向各个运动部件发出运动控制指令,以实现运动控制执行。具体的,运动控制单元170包括运动控制模块210以及第一通信模块220,脚闸控制单元180包括脚闸控制模块250以及第二通信模块240,在第一通信模块220与第二通信模块240连接有通信方式模块230。其中,第一通信模块220用于实现运动控制端310通信转接,第二通信模块240用于实现脚闸控制端320通信转接,通信方式模块230包括有线通信和无线通信。运动控制模块210基于第一通信模块220接收脚闸控制模块250的脚闸控制命令,以控制各个运动部件的移动;脚闸控制模块250基于第二通信模块240发出脚闸控制命令。
38.运动部件单元,用于接收运动控制指令,以控制各个运动部件工作。其中,运动部件单元包括c型臂131、压迫板模块130以及承载台132,运动控制单元170根据脚闸控制命令向c型臂131、压迫板模块130以及承载台132发送运动控制指令向,以控制c型臂131、压迫板模块130以及承载台132工作。
39.曝光控制模块140,分别与高压发生器112、探测器单元、运动控制单元170连接,以实现曝光控制。
40.本发明涉及通信系统、电机控制、硬件电路信号处理、软件识别等部分。通过闭环控制,实现运动部件的控制,例如压迫板、承载台的运动位置调控,满足患者拍摄需求。
41.具体的,如图1所示,基于本发明的乳腺x光机的运动部件控制系统包括:x射线球管模块111、准直器模块120、压迫板模块130、曝光控制模块140、探测器板模块150、图像处理模块160、运动控制模块210以及脚闸控制模块250。其中,交流电能经过高压发生部分产生高频脉冲电压,经整流后加于x射线球管上产生x射线,x射线经过准直器模块120调整,穿过患者乳腺体部位衰减,衰减的信号被探测器板模块150接收,获得影像信息,该信息进一步上传给图像处理工作站,进行图像数字信号处理,处理过的图像信息可以打印出来供医护人员临床诊断参考,或者远程分享和诊断。
42.在实际应用中,x射线单元110包括高压发生器112、x射线球管模块111等,由高压发生器112部分产生高频脉冲电压,该电压经整流加于x射线球管,使得x射线球管产生x射线;准直器模块120将x射线的视野约束到指定的范围内,避免患者受到额外x射线照射;压迫板模块130接收运动控制指令,控制压迫板上下运动,压迫乳房以获得较佳乳腺拍摄效果;曝光控制模块140实现曝光控制,并实现高压模块的控制和探测器板的控制;探测器板模块150接收x射线转换成影像数字信息;图像处理模块160获得探测器板的图像信息,进而进行图像优化处理和显示,以及图像分析和共享;运动控制模块210控制c型臂运动、压迫板
运动、控制准直器、承载台升降等,同时与脚闸控制、曝光控制等保持通信,接收脚闸控制信息指令,实现运动控制执行;脚闸控制模块250实现脚闸命令控制,进而控制运动部件工作,例如控制承载台132升降以适应不同高矮人群、控制压迫板以适应不同特点乳房拍摄。
43.如图2和图3所示,运动控制模块210包括第一处理器1(u31),脚闸控制模块250包括第二处理器2(u32)以及多个脚闸,如第一脚闸370(u33)、第二脚闸380(u34),第一通信模块220为运动端无线转接板,第二通信模块240为脚闸控制端无线转接板,通过检测第一处理器1、第二处理器2的io1端的电平信号来识别是否为无线通信,第一处理器1的uart1端与运动端无线转接板的uart端连接,第二处理器2的uart1端与脚闸控制端无线转接板的uart端连接,第一处理器1的uart2端与第二处理器2的uart2端连接,第一处理器1的io2端接地,用于识别是否为有线通信,第二处理器2的io2
‑
ion端分别接多个脚闸。
44.在本实施例中,运动控制单元170、脚闸控制单元180分别包括运动控制模块210、第一通信模块220、通信方式模块230、第二通信模块240、以及脚闸控制模块250。其中,运动控制模块210接收脚闸的控制指令,控制承载台132的升级、以及压迫板的升降;第一通信模块220实现运动端通信转接;通信方式模块230可实现通信,包括实现有线通信和无线通信,即可实现有线或者无线通信;第二通信模块240实现脚闸控制端通信转接;脚闸控制模块250根据脚闸指令,控制承载台132、压迫板等的运动,根据脚闸数量控制不同的对象。可见,医护人员通过操作脚闸,可以实现承载台132和压迫板等的运动控制;可以通过有线连接或者无线操控,便于医护人员操控,改善操控体验。
45.如图3所示,运动控制单元170和脚闸控制单元180具体包括:运动控制端310(主机端),脚闸控制端320,运动控制模块210,运动端无线转接板,脚闸控制端无线转接板(安装无线通信模块,例如zigbee、蓝牙、lora等等),脚闸控制模块250,第一脚闸370,以及第二脚闸380。
46.如图4所示,本实施例还提供一种数字乳腺x射线成像系统,其包括c型臂11、机架12、图像处理工作站13、x射线发射模块14、压迫板15、探测器16、承载台17、脚闸18等。控制c型臂11旋转可扫描各个方位的乳腺情况,机架12升降可适用不同身高人群;图像处理工作站13数据处理并输出医护人员期望的乳腺图像。其工作原理为:交流电能经过高压发生部分产生高频脉冲电压,经整流后加于x射线发射模块14产生x射线,x射线经过准直器调整,经压迫板15,穿过患者乳腺体部位衰减,衰减的信号被探测器16接收,获得影像数字信息,该信息进一步上传给图像处理工作站13,进行图像数字信号处理。期间,医护人员可以通过脚闸18控制机器的运动部件,比如可以控制承载台17的升降以适用不同高矮患者,压迫板15的升降以适用不同乳房及特点患者,改善医护人员的体验。
47.相比现有技术,本发明的有益效果在于:
48.(1)本发明提供的乳腺x光机的运动控制系统采用多种通信技术,即提出采用无线或者有线的通信方式,有利于用户根据应用场景选配,改善用户体验;
49.(2)本发明采用无线通信技术,消除布线,脚闸使用更加灵活,可以在检测室使用,也可以在控制室操作使用,应用场景更广泛;
50.(3)本发明采用有线和无线切换技术,使得通信方式更加智能,使用更加灵活;
51.(4)本发明提供一种运动控制系统通信机制及其切换方法,该方法能保证使用的可靠性和稳定性;
52.(5)本发明具体提供了用于乳腺x光机的运动控制系统的原理和工作流程,能有效实现远程控制;
53.(6)本发明的乳腺x光机运动控制系统兼容有线和无线的系统方案,有利于市场开拓。
54.一种乳腺x光机的运动部件控制方法实施例,应用于上述的乳腺x光机的运动部件控制系统,该方法包括以下步骤:
55.选择脚闸控制通信方式,由运动控制单元170检测是否为有线通信接入或无线通信接入,在确定通信方式后,由脚闸控制单元180输出脚闸控制命令,运动控制单元170根据该命令向各个运动部件发出运动控制指令,以实现运动控制执行。
56.在调整好各个运动部件位置后,通过高压发生器112产生高频脉冲电压施加于x射线单元110产生指定范围内的x射线,该x射线经过压迫板模块130穿过目标部位衰减,衰减的信号被探测器单元接收,获得影像数字信息,该信息进一步上传给图像处理模块160,进行图像优化处理和显示,以及图像分析和共享。
57.在本实施例中,由运动控制单元170检测是否为有线通信接入或无线通信接入,包括:判断脚闸控制端是否为有线通信接入,若是,判断握手通信是否正常,若正常,则进入脚闸的有线通信模式。
58.若确定不是有线通信接入,则进入无线通信检测状态,其中,无线通信检测状态包括运动控制端部分和脚闸控制端部分。
59.检测脚闸控制端是否接入无线通信,若接入并握手通信正常,则进入脚闸无线通信模式。
60.若握手通信为非正常,且通信连接超时,则进行脚闸通信故障报警。
61.若通信连接未超时,则尝试有线通信和无线通信连接,直至通信成功。
62.具体的,当系统上电初始化完成后,选择脚闸控制通信方式。
63.然后,通过主机检测是否为有线通信接入,即检测第一处理器1的io2端是否为高或者低电平,当脚闸控制端320为有线通信接入时,第二处理器2拉低使得第一处理器1的io2端由高电平被拉至低电平,从而确定为有线通信接入;反之,若脚闸控制端320没有有线通信接入时,则第一处理器1的io2端默认为高电平;
64.若检测到有线通信接入,则检测串口通信uart2端是否正常,若正常,则进入有线通信模式。
65.若未检测到有线通信接入或者有线通信异常,则检测是否接入无线通信。
66.无线通信的检测分为运动控制端部分和脚闸控制端320部分,在检测是否接入无线通信时,检测第一处理器1和第二处理器2的io1端电平信号,若为低电平,则接入无线通信入。
67.如检测第一处理器1的io1端电平信号,若为高电平,则确定没有无线转接板接入。
68.若第一处理器1的io1端电平信号被运动端无线转接板拉低,则确定无线通信接入,开启无线通信测试,若无线通信测试正常,则进入无线通信模式。
69.否则,若无线通信测试异常,则重复通信测试步骤,直到通信连接超时报告通信异常。
70.在实际应用中,在主机系统上电初始化完成后,选择脚闸控制通信方式。
71.首先,由主机检测是否为有线通信接入,检测第一处理器1的io2端是否为高或者低电平(有线通信接入)。其原理为:当脚闸控制端320接入时,则脚闸控制端320处电平被拉低(接地),使得第一处理器1的io2端由高电平被拉低,从而判断有线通信接入;反之,若没有脚闸控制端320接入,则第一处理器1的io2端默认高电平。
72.如果检测到有线通信接入,则检测串口通信(uart2端)是否正常,如果正常,则选取有线通信。
73.如果未检测到有线通信接入,或者有线通信异常,则检测无线通信接入与否。
74.本实施例的无线通信检测的方法分运动控制端部分和脚闸控制端部分,这两部分检测无线接入的方式是相同的,即检测第一处理器1和第二处理器2的io1的端口电平,则低电平为无线通信接入。以运动控制端310为例,检测第一处理器1的io1端电平,如果电平为高,则没有无线转接板接入,否则,如果电平被运动端无线转接板拉低(接地),则判定无线通信模块接入,开启无线通信测试,如果无线通信正常,则选择无线通信。否则,如果通信异常,则重复通信检测步骤,直到超时报告通信异常。
75.从以上步骤可见,本发明能有效完成系统的有线和无线选择,并能有效监测通信的状况,改善控制灵活性和通信可靠性,容易满足机器通信需求。
76.具体的,如图5所示,基于本发明的乳腺x光机的运动部件控制通信方法的控制流程包括如下步骤:
77.(1)系统初始化完成,进入系统自检模式;
78.(2)系统自检是否正常,如果有故障异常,则给出系统故障报警提醒;
79.(3)如果系统自检正常,则用户确定工作模式;
80.(4)判断脚闸控制是否为有线通信接入,如果为有线通信接入,判断握手通信是否正常;
81.(5)如果握手通信正常,则进入脚闸的有线通信模式,否则进入无线通信检测;
82.(6)检测脚闸的无线通信是否接入,如果接入并通信正常,则进入脚闸无线通信模式;
83.(7)如果通信不正常,且通信连接超时,则脚闸通信故障报警;
84.(8)若通信连接未超时,则尝试有线和无线通信连接,直至通信成功。
85.从以上步骤可见,该控制流程能有效完成通信系统的切换,满足系统通信可靠性要求。
86.另外,本实施例的通信端口为:有线/无线通信采用一个串口通信,切换可采用模拟开关,也就是说,当有线通信接入后,可选择有线通信,没有检查有线通信接入则选择无线通信。
87.本实施例的有线通信包括但不限于rs485、rs422、can总线和以太网等通信方式。
88.本实施例的无线通信包括但不限于zigbee、ble、wifi、nb
‑
iot、lora等通信方式。
89.本实施例的脚闸位数包括但不限于2位、3位、4位、或者更多位。可以根据脚闸位数,控制相应的运动部件,比如承载台上下控制、压迫板上下控制、c型臂上下运动、c型臂左右运动、机架上下运动、球管升降等,均可以实现脚闸远程控制。
90.本实施例的脚闸位置包括但不限于放于主机近端,也可以放于控制室远程操控。其中,脚闸即可单独无线控制,也可以单独有线控制,还可以有线无线同时接通,通信过程
互相切换,根据通信稳定性和可靠性选择,选择最可靠稳定的通信。
91.因此,本发明采用了无线通信技术的方法,实现乳腺x光机运动部件端与脚闸控制端无线连接;采用了无线通信和有线通信技术,二者相结合完成乳腺x光机运动部件的远近控制;实现无线和有线通信的切换,该切换方法有效、实用、可靠;给出了有线和无线通信的硬件原理切换机制,该选取原理简单实用;具体给出了有线和无线通信切换的原理和处理流程,能有效实现通信切换和控制;乳腺x光机运动控制系统无线化和通信切换,给用户提供多种通信选择,用户体验大大改善。
92.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1