一种适用于杆状医疗器械的三维力检测夹持机构
1.本发明涉及一种适用于杆状医疗器械具的三维力检测夹持机构,属于受力检测夹持设备技术领域。
背景技术:
2.现有技术中能够检测三维力的夹持机构大多尺寸较大,即使是小型三维力传感器,也并不适用于如穿刺消融针、活检针、咽拭子棉签等直径小至几个毫米大小的小型杆状医疗器械的三维力检测夹持,同时已有的小型的三维力传感器造价非常昂贵,成本过高,不适用于大面积推广使用,尤其不适用于小型检测工具的低成本力检测。
技术实现要素:
3.本发明是为了解决上述技术问题,进而提供了一种适用于杆状医疗器械的三维力检测夹持机构。
4.本发明为解决上述技术问题所采用的技术方案是:
5.一种适用于杆状医疗器械的三维力检测夹持机构,它包括底座、两个夹块及两个连接块,其中两个连接块对称布置,底座布置在两个连接块的下部之间且底座的一端与一个连接块固接,两个夹块对称布置且对应固装在两个连接块的上部,底座的顶端开设有第一限位凹槽;
6.每个所述夹块均包括夹块主体及两个弹片,夹块主体的一侧面由上到下依次开设有第二限位凹槽及通槽,通槽的顶端与第二限位凹槽的底端连通设置,每个弹片均竖向在第二限位凹槽内,且弹片的底端与第二限位凹槽的底端固接,两个夹块对接状态下,四个弹片周向均布且两个通槽对接构成圆形通孔,杆状医疗器械由上到下依次夹持在四个弹片所围成的空间及所述圆形通孔内且杆状医疗器械的底端抵设在第一限位凹槽内;
7.第一限位凹槽的底部布置有第一压敏传感器,第二限位凹槽的内壁布置有数量与弹片相等的第二压敏传感器,且第二压敏传感器与弹片一一对应布置。
8.进一步地,第二限位凹槽的内壁加工有若干凸台,每个第二压敏传感器均对应安装在若干凸台上。
9.进一步地,每个夹块主体上背离另一个夹块主体的一侧均开设有安装槽,连接块对应卡装在安装槽内且连接块与夹块主体之间通过螺栓固接。
10.进一步地,底座上部开设有布线通道,第一压敏传感器的连接线通过布线通道连接至外部设备。
11.进一步地,一个连接块的下部开设有第一卡槽,底座的一端位于第一卡槽内。
12.进一步地,另一个连接块的下部开设有第二卡槽,两个夹块对接状态下,底座的另一端位于第二卡槽内。
13.进一步地,底座与一个连接块之间通过螺栓固接。
14.进一步地,所述夹块为tpu材质。
15.本发明与现有技术相比具有以下效果:
16.通过周向均布的四个弹片,实现完整地检测杆状医疗器械360
°
的受力情况。
17.通过选取圆形通孔直径不同的夹块,可实现小至穿刺消融针、活检针、咽拭子棉签等类小型杆状医疗器械大小、大至其它任何工具的末端力检测。
18.本技术结构简单,与现有技术相比,尺寸更小,成本更低,实用性更高。
19.本技术可应用于穿刺机器人、消融机器人或咽拭子智能采集机器人当中,机械夹爪夹持杆状医疗器械,本技术能够为上述机器人执行任务过程中提供杆状医疗器械与人体之间快速的三维作用力检测,为机器人控制提供力反馈,避免因医疗器械与人体之间作用力过大对人体造成破坏,保证机器人执行任务过程中的安全性。
20.现有技术中的三维力传感器一般都需要与被检测工具固定,而具有力反馈的机械夹爪只能检测一个维度的受力,而本技术可以分体式固定在机械爪的两个夹爪上,随夹爪自由地运动,夹爪闭合时方可与被检测工具接触。
附图说明
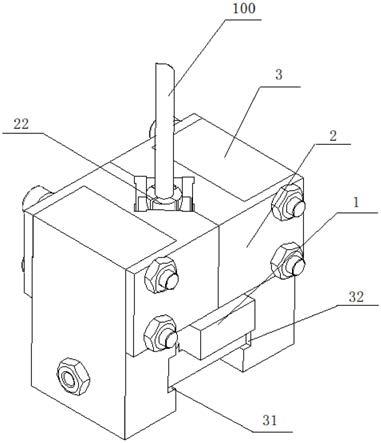
21.图1为本技术的立体结构示意图;
22.图2为夹块的立体结构示意图;
23.图3为底座的立体结构示意图;
24.图4为受力检测过程中弹片的受力示意图。
具体实施方式
25.具体实施方式一:结合图1~4说明本实施方式,一种适用于柱状医疗器械的三维力检测夹持机构,它包括底座1、两个夹块2及两个连接块3,其中两个连接块3对称布置,底座1布置在两个连接块3的下部之间且底座1的一端与一个连接块3固接,两个夹块2对称布置且对应固装在两个连接块3的上部,底座1的顶端开设有第一限位凹槽11;
26.每个所述夹块2均包括夹块主体21及两个弹片22,夹块主体21的一侧面由上到下依次开设有第二限位凹槽21-1及通槽21-2,通槽21-2的顶端与第二限位凹槽21-1的底端连通设置,每个弹片22均竖向在第二限位凹槽21-1内,且弹片22的底端与第二限位凹槽21-1的底端固接,两个夹块2对接状态下,四个弹片22周向均布且两个通槽21-2对接构成圆形通孔,柱状医疗器械由上到下依次夹持在四个弹片22所围成的空间及所述圆形通孔内且柱状医疗器械的底端抵设在第一限位凹槽11内;
27.第一限位凹槽11的底部布置有第一压敏传感器,第二限位凹槽21-1的内壁布置有数量与弹片22相等的第二压敏传感器,且第二压敏传感器与弹片22一一对应布置。
28.连接块3的底端固装在平行夹爪上,所述平行夹爪还可以为任何可以实现开合夹持的结构,如手指气缸等。本技术的三维力检测夹持机构中,夹块主体21与连接块3之间以及底座1与连接块3之间均通过螺栓固接,使得使用及更换过程更方便。
29.第二压敏传感器能够检测其对应的弹片22的压力。第一压敏传感器能够检测柱状医疗器械的轴向受力。
30.受力检测过程中,当柱状医疗器械100受到环境作用力而发生弯曲时,其弯曲方向的弹片22也随之弯曲,若弯曲方向朝向其中一个弹片22,则该弹片22会与其对应的第二压
敏传感器接触,使第二压敏传感器检测到受力。若弯曲方向在相临两个弹片22之间,则两个弹片22会将柱状医疗器械的受力f分解为fx和fy,两个第二压敏传感器会测量各自方向分解后的力,由于两个受力相互垂直,因此,每两个第二压敏传感器可以完整检测90
°
范围内的受力。本技术为分体式结构,当夹爪闭合时,检测夹持机构会将柱状医疗器械卡在中心位置。每个夹块2中弹片22的数量均为两个。如此设计,通过周向均布的四个弹片22,实现完整地检测柱状医疗器械360
°
的受力情况。两个弹片22对应的两个压敏传感器检测平面的法向量相互垂直。
31.弹片22受力发生弯曲形变后能够自动恢复初始状态。
32.当柱状医疗器械100没有形变时,弹片22会在弹性作用下保持在竖直状态,不与第二压敏传感器接触,第二压敏传感器受力为0。当柱状医疗器械轴向受力时,底座1中的第一压敏传感器会检测到轴向受力。
33.因此,通过本技术中的五个压敏传感器可以实现柱状医疗器械的三维受力检测。
34.本技术中采用的压敏传感器均优选为rp-c5lt-lf5薄膜压敏传感器。其可以粗略检测0.2n-6n受力,受力面积为5mm圆形区域,精度为5%-25%,能够进行粗测量并反映受力变化趋势。
35.通过选取圆形通孔直径不同的夹块2,可实现小至穿刺消融针、活检针、咽拭子棉签等类小型柱状医疗器械大小、大至其它任何工具的末端力检测。
36.本技术结构简单,与现有技术相比,尺寸更小,成本更低,实用性更高。
37.本技术可应用于穿刺机器人、消融机器人或咽拭子智能采集机器人当中,机械夹爪夹持杆状医疗器械,本技术能够为上述机器人执行任务过程中提供杆状医疗器械与人体之间快速的三维作用力检测,为机器人控制提供力反馈,避免因医疗器械与人体之间作用力过大对人体造成破坏,保证机器人执行任务过程中的安全性。
38.现有技术中的三维力传感器一般都需要与被检测工具固定,而具有力反馈的机械夹爪只能检测一个维度的受力,而本技术可以分体式固定在机械爪的两个夹爪上,随夹爪自由地运动,夹爪闭合时方可与被检测工具接触。
39.第二限位凹槽21-1的内壁加工有若干凸台21-3,每个第二压敏传感器均对应安装在若干凸台21-3上。如此设计,缩短弹片22与第二压敏传感器之间的距离,进而提高医疗器械受力检测的灵敏度及精度,降低夹块2的加工难度。
40.每个夹块主体21上背离另一个夹块主体21的一侧均开设有安装槽21-4,连接块3对应卡装在安装槽21-4内且连接块3与夹块主体21之间通过螺栓固接。
41.底座1上部开设有布线通道12,第一压敏传感器的连接线通过布线通道12连接至外部设备。
42.一个连接块3的下部开设有第一卡槽31,底座1的一端位于第一卡槽31内。通过设置第一卡槽31,便于底座1与连接块3之间的精确安装,保证底座1与连接块3安装后,第二限位凹槽21-1与圆形通孔的上下位置对应,进而使得夹块2开合动作时,两个夹块2之间的相对位置更准确。
43.另一个连接块3的下部开设有第二卡槽32,两个夹块2对接状态下,底座1的另一端位于第二卡槽32内。通过设置第二卡槽32,使得两个夹块2对接位置更准确。
44.底座1与一个连接块3之间通过螺栓固接。如此设计,便于底座1的安装与拆卸。
45.所述夹块2为tpu材质。采用tpu弹性材料进行3d打印制作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1