椎间装置和相关方法与流程
椎间装置和相关方法
1.本技术是申请日为2014年5月14日、申请号为201480039966.4、发明创造名称为“椎间装置和相关方法”的中国发明专利申请的分案申请。
2.本技术要求2013年5月14日提交的标题为“intervertebral devices and related methods(椎间装置和相关方法)”的美国临时申请系列号no.61/822,919、2013年7月23日提交的标题为“intervertebral devices and related methods(椎间装置和相关方法)”的美国临时申请系列号no.61/857,252和2014年3月19日提交的标题为“intervertebral devices and related methods(椎间装置和相关方法)”的美国临时申请系列号no.61/955,757的优先权,这些申请的全部内容并入本文作为参考。
技术领域
3.本公开总地涉及医疗装置,并且更具体地涉及用于脊柱手术的医疗装置。
背景技术:
4.退变性椎(间)盘疾病是常见的病症,其会影响椎盘的全部或一部分,椎盘是位于脊柱的椎体之间的类似于垫子的结构。退变性椎盘疾病可能引起例如椎间盘突出,其中椎盘向外膨出或挤出超过椎盘和脊柱的通常边缘。特别地,椎盘突出被认为是椎盘上的过量负荷加载与纤维环由于诸如老化和遗传之类的因素而减弱相结合的结果。这些退变性椎盘疾病也与脊椎狭窄/椎管狭窄(脊柱的骨骼和韧带结构的变窄)有关。虽然椎盘突出可发生在沿椎盘周边的任何位置,但更常见地发生在脊髓和脊神经根所处的椎盘的后侧和后外侧区域。对这些神经结构的压迫会导致可显著地影响基本的日常活动和生活质量的疼痛、麻痹、虚弱、大小便失禁和其它神经学症状。
5.常常通过保守治疗来寻求对与椎盘突出或其它退变性椎盘疾病相关的疼痛的暂时缓解,包括姿势疗法(例如坐着或向前弯曲以减轻脊柱上的压力)、物理疗法和药物治疗,以减轻疼痛和炎症。当保守治疗不能消除病人的症状时,可考虑用外科手术来治疗症状的结构病源。当手术不能解除病人的症状时,更有力的措施可包括椎盘置换手术或椎骨融合术。
6.已针对椎盘置换和椎骨融合研发出许多可移植(可植入)装置。可布置也称为保持架系统的这些可移植装置以置换椎盘并使相邻的椎骨融合,从而缓解疼痛并向患者提供增强的活动能力。然而,已知的可移植装置和方法具有弊端。例如,当前可买到的许多可移植装置并没有足量的材料来促进位于所述装置和相邻的椎骨内和周围的骨生长。这种骨生长材料允许相邻椎骨的更高融合水平,从而提供增强的稳定性并且最大限度地降低将来发生更多问题的可能性。此外,许多可移植装置是不容易用于微创手术中的大型结构。确切而言,它们可能需要允许较大创口的外科手术,这使患者承受更高风险的疾病和长时间感染。
7.需要用于置换椎盘的可移植装置,其允许足量地安置可引起相邻椎骨之间的更好融合的骨生长材料。还需要在微创手术期间提供这些可移植装置的进一步需求,从而降低感染风险并且允许患者的更快愈合。
技术实现要素:
8.根据本公开,一种可扩张的椎间装置可包括基部、第一体部和第二体部,所述基部包括构造成与第一生物组织相接(interface)的底面,所述第一体部可滑动地安装在所述基部上并且构造成相对于所述基部至少沿第一方向移动,所述第一体部包括第一接合元件,所述第二体部可滑动地安装在所述基部上并且构造成相对于所述基部至少沿第二方向移动。所述第二体部可包括构造成与第二生物组织相接的顶面。所述基部可包括第二接合元件,使得第二接合元件与所述第一接合元件联接。在特定实施例中,所述第一和第二接合元件构造成使得,当在所述第二体部的顶面和所述基部的底面之间施加压缩力时,所述第一和第二接合元件的联接阻止所述第二体部相对于所述基部沿第三方向移动。在另一些实施例中,所述第三方向与所述第一方向大致相反,而在再另一些实施例中,所述第三方向与所述第一方向大致相反。
9.在又一些实施例中,所述第一体部可包括第一斜面且所述第二体部可包括第二斜面。所述第一斜面可构造成与所述第二斜面可滑动地联接,使得所述第一体部沿所述第一方向的移动引起所述第二体部沿所述第二方向的移动。所述第一体部的所述第一斜面可相对于所述基部的纵向轴线形成第一锐角,并且所述第二体部的所述第二斜面可相对于所述基部的纵向轴线形成第二锐角。在一些实施例中,所述第一锐角与所述第二锐角大致相等,而在另一些实施例中,所述第一锐角与所述第二锐角不同。在再另一些实施例中,所述第一体部的所述第一斜面可相对于所述基部的纵向轴线形成第一锐角,并且所述第二体部的所述第二斜面可相对于所述基部的纵向轴线形成第二锐角。所述第二体部相对于所述第一体部的移动可限定一移动速率,所述第一和第二锐角可被选择成提供所述移动速率。
10.在特定实施例中,所述第一体部可构造成可移除地安装在平移部件上,其中所述平移部件的操作引起所述第一体部大体沿着所述基部的纵向轴线沿所述第一方向的移动。在一些实施例中,所述基部包括纵向轴线,并且所述第一方向与所述基部的纵向轴线大致平行,而在另一些实施例中,所述基部包括纵向轴线,所述第二方向与所述基部的纵向轴线大致垂直。在另一些实施例中,所述第一方向与所述第二方向大致垂直。
11.在再另一些实施例中,所述基部包括第一和第二端部以及从所述第一端部延伸到所述第二端部的纵向轴线,并且所述第一体部的沿着所述基部的纵向轴线的多个位置中的每个位置都与所述第二体部的多个位置中相应的一个位置对应。所述第一体部的所述多个位置中的每个位置都可与所述椎间装置的多个高度中相应的一个高度对应。
12.在又一些实施例中,所述第一方向处在沿着所述基部的纵向轴线朝向所述装置的远端的方向上,而在另一些实施例中,所述第一方向处在沿着所述基部的纵向轴线朝向所述装置的近端的方向上。
13.在另一方面,一种方法包括:提供椎间装置,所述椎间装置具有基部、第一体部和第二体部,所述第一体部构造成相对于所述基部至少沿第一方向移动并且所述第二体部构造成相对于所述基部至少沿第二方向移动,所述第一体部包括第一接合元件并且所述基部包括第二接合元件;
14.使所述第一体部沿所述第一方向移动,所述第二体部响应于所述第一体部的移动而沿所述第二方向移动,所述第一体部的所述第一接合元件与所述基部的所述第二接合元件联接,所述第一和第二接合元件的联接阻止所述第二体部沿第三方向移动。
15.在特定实施例中,所述基部以及所述第一和第二体部形成空隙,所述第一体部沿所述第一方向的移动使得所述空隙的范围(面积)增大。所述方法可包括将一种或多种治疗剂布置在所述空隙内,所述治疗剂包括例如促进骨生长的物质。所述基部以及第一和第二体部中的每一者的中心轴线可从所述空隙通过。
16.在另一些实施例中,使所述第一元件沿所述第一方向移动导致调节所述椎间装置的高度。调节所述高度可包括使所述椎间装置扩张和收缩。
17.在又一些实施例中,所述第一方向处在沿着所述基部的纵向轴线朝向所述装置的远端的方向上,而在另一些实施例中,所述第一方向处在沿着所述基部的纵向轴线朝向所述装置的近端的方向上。
18.应理解,前文的总体描述和下文的详细描述只是示例性和说明性的,且并非对任何要求专利权的实施例构成限制。本文中公开或构想的实施例的其它目的、特征和优点将从附图和下面的详细描述显而易见。
附图说明
19.将讨论本公开的实施例,其示例可能在附图中被示出。这些图旨在为说明性的而不是限制性的。虽然在这些实施例的上下文中大体描述了各实施例的特定方面,但应当理解的是,其并非旨在将保护范围限制于这些特定实施例。在附图中:
20.图1是处于第一构型的椎间装置的透视图。
21.图2是处于第二构型的图1的椎间装置的透视图。
22.图3是图1的椎间装置的局部剖视图。
23.图4是图2的椎间装置的另一局部剖视图。
24.图5a是图2的椎间装置的一部分的局部剖视图。
25.图5b是图2的椎间装置的一部分的另一局部剖视图。
26.图6是图2的椎间装置的一部分。
27.图7是另一椎间装置的透视图。
28.图8是图1的椎间装置的局部剖视图。
29.图9是处于不同构型的图1的椎间装置的另一局部剖视图。
30.图10是图9的椎间装置的一部分的局部剖视图。
31.图11是图9的椎间装置的一部分的另一局部剖视图。
32.图12是处于第一构型的椎间装置的透视图。
33.图13a-13c是处于第二构型的图12的椎间装置的透视图。
34.图14是图12的椎间装置的局部剖视图。
35.图15是图13a-13c的椎间装置的局部剖视图。
36.图16是示例性输送装置的透视图。
37.图17是图16的示例性输送装置的一部分的透视图。
38.图18是示例性椎间装置的元件的透视图。
39.图19是图17的示例性输送装置的该部分和示例性椎间装置之间的交接处的局部剖视图。
40.图20是图17的示例性输送装置的该部分和示例性椎间装置之间的交接处的另一
局部剖视图。
41.图21是另一示例性输送装置的透视图。
42.图22是图21的示例性输送装置的一部分的局部剖视图。
43.图23是图21的示例性输送装置的一部分的另一局部剖视图。
44.图24是图21的示例性输送装置的一部分的透视图。
45.图25是图21的示例性输送装置的一部分的另一局部剖视图。
46.图26是处于第一构型的另一椎间装置的透视图。
47.图27a和27b是处于第二构型的图26的椎间装置的透视图。
48.图28是图26的椎间装置的局部剖视图。
49.图29是图27a的椎间装置的局部剖视图。
50.图30a-30c是与示例性椎间装置的一部分相接的示例性输送装置的透视图。
51.图31是另一示例性椎间装置的俯视图。
52.图32是图31的示例性椎间装置的局部剖视图。
53.图33是图31的示例性椎间装置的另一局部剖视图。
54.图34是另一示例性椎间装置的局部剖视图。
55.图35是图34的示例性椎间装置的另一局部剖视图。
56.图36是另一示例性输送装置的透视图。
57.图37是图36的示例性输送装置的一部分的透视图。
58.图38是图37的示例性椎间装置的一部分的元件的俯视图。
59.图39是图37的示例性椎间装置的一部分的元件的局部剖视图。
60.图40是图37的示例性椎间装置的一部分的元件的另一俯视图。
61.图41是图37的示例性椎间装置的一部分的元件的另一局部剖视图。
62.图42a-c是图37的示例性输送装置的一部分的特定元件的透视图。
63.图43是图36的示例性输送装置的一部分的局部剖视图。
64.图44是图36的示例性输送装置的元件的透视图。
65.图45a-45b是图33的输送装置的一部分的局部剖视图。
66.图46a-46b是图44的元件的一部分的透视图。
67.图47是图44的元件的一部分的局部截切图。
68.图48是图44的元件的一部分的局部剖视图。
具体实施方式
69.公开了具有适于安置在两个相邻椎骨之间而代替其间的椎盘的功能的构型的椎间装置和系统及其使用方法。本文中构想的椎间装置和系统是用于置换可能已例如由于疾病而退化的椎盘的可移植装置。所述椎间装置和系统构造成允许将足量治疗剂安置在其中,所述治疗剂包括可引起相邻椎骨之间的更好融合的骨生长促进材料。所述椎间装置和系统构造成在需要的情况下用于微创手术中。
70.以下描述出于说明的目的而被阐述以便提供对本公开的各种实施例的理解。然而,显而易见的是,本领域技术人员将认识到,本公开的实施例可结合在多种不同系统和装置中。
71.本公开的实施例可包括特定方面,每个方面都可存在于其一个或多个医疗装置或系统中。以下以剖视图或框图示出的结构和装置不一定按比例绘制并且说明了示例性实施例。此外,本文中公开或构想的图示的示例性实施例可包括比所示的更多或更少的结构并且不意图局限于示出的具体结构。虽然使用特定标记(如“锁定”或“治疗剂”)相对于与医疗装置或系统有关的特定结构或方法描述本公开的各个部分,但这些标记并不意味着加以限制。
72.本文中描述的可扩张的椎间装置可由任意合适的生物相容性材料制成,所述材料包括但不限于金属、金属合金(例如不锈钢)和聚合物(例如聚碳酸酯),并且可使用任意适当的工艺如螺旋加工或模制(例如注射模制)形成。本文中的椎间装置可针对具有约12mm以下的操作内腔的微创手术来确定尺寸。仅出于说明的目的,本文中描述或构想的任何可扩张的椎间装置可具有处于从约6mm至约16mm的范围内的高度、处于从约20mm至约40mm的范围内的长度和处于从约8mm至约16mm的范围内的宽度。本文中描述或构想的椎间装置可通过任意合适的手术过程——例如,比方说通过后路腰椎间体接近或通过经椎间孔腰椎间体接近——而被定位在相邻椎骨之间。
73.现在将详细讨论在附图中示出的本发明的示例性实施例。
74.转到图1和2,示例性椎间装置100的透视图包括第一元件或基部元件110、第二元件或滑动元件140、第三元件或升降元件170和驱动机构190。如在以下讨论中将更好地理解的,元件110、140、170协作成使得椎间装置100的几何高度h可具有如图1大体所示的最小塌缩构型,或如图2所示的最大扩张构型,或其间的任意高度,如下文更详细地讨论的。如根据以下讨论将更好地理解的,元件110、140、170包括协作成允许各元件110、140、170相对于彼此的协调移动的凸部和凹部。例如,当第二元件140在第一元件110内从近侧位置向远侧位置平移时,元件110、140、170的凸部和凹部协作而引起第三元件170相对于第一元件110和第二元件140的抬高。
75.第一元件110构造成提供用于椎间装置100的基部或外部结构,从而将其余的元件140、170保持在其中。第一元件110包括第一端部或近端112和第二端部或远端114以及两个侧部,即第一侧部116和对向的侧部118。第一元件110的底部120可包括一个或多个开口122以允许治疗材料如骨生长促进材料从其中通过。如本文中所用,术语“治疗材料”或“治疗剂”可包括用于医疗诊断、治疗、处理或疾病预防的任意物质,包括例如骨生长材料或药物洗脱材料,或者包含或布置了这些物质的产品或医疗装置。
76.第一元件110的近端112可包括用于供一个或多个工具的一部分通过的开口130,所述工具用于使椎间装置100扩张、收缩或将其锁定在特定构型,如下文参照图3和4更详细地讨论的。例如,椎间装置100可从如图1所示的具有高度h
1-1
的第一位置或构型扩张为如图2所示的具有高度h
1-2
或其间的任意合适高度的第二位置或构型并且被锁定在任意这种构型或任意这种高度。如本文中所用,结合椎间装置100或本文中描述或构想的任意其它椎间装置使用的术语“锁定”、“被锁定”或“锁止”应当指大致维持各主要元件如元件110、140、170相对于彼此的位置。空隙或空间102在椎间装置100呈现如图1所示的塌缩构型时由元件110、140、170限定,并且空隙或空间102在椎间装置100呈现如图2所示的扩张构型时扩大。然后穿过开口120或其它合适的开口布置治疗剂以充填空隙102并从椎间装置100向外扩张以与周围组织(如椎骨的组织)接合。
77.第一元件110的近端112也可包括如图3和4更好地示出的结构如螺纹结构130t,和凹部132,凹部132可允许如下文参照图17更详细地描述的一个或多个输送系统的附接点。这种附接点也可形成用于至少最初将椎间装置100定位在例如脊柱的两个相邻椎骨之间的基础。在另一些实施例中,所采用的输送系统可包括管状部件,例如,包含骨生长促进材料的治疗材料可经所述管状部件被引导到椎间装置100内的内部空隙或空间,并经元件110的一个或多个开口120或其余的元件140、170的类似开口离开。这样,此类材料可与周围组织(如椎骨的组织)接触。
78.第一元件110的侧部116、118的内部侧壁可包括如参照图5a更好地看到的一个或多个凸部124和一个或多个凹部126。这些凸部124和凹部126包括与其它元件140、170的凸部和凹部的一个或多个表面相接而导致协调移动的表面。
79.第二元件140与第一元件110可滑动地相接,使得第二元件140至少相对于第一元件110水平地平移。第二元件140可包括与第二元件140联接的定位结构或销145。销145可构造成或适于在设置于第一元件110中的通道或槽128内移动,以确保第二元件140相对于元件110沿特定方向移动。相应地,槽128和相关的结构或销145可构造成相对于元件110的纵向中心线形成任意期望的角度。如图所示,槽128与元件110的纵向线大致平行,因此元件130沿与元件110大致垂直的方向移动。第二元件140也可包括与一个或多个其它元件110、170的开口(如第一元件110的开口122)流体连通的一个或多个开口142,以允许治疗剂从其中通过。
80.第三元件170包括具有与空隙102流体连通的一个或多个开口172的顶面171。该顶面可包括用于实现或促进与身体组织如椎骨组织的接触和保持的其它结构。第三元件170可包括一个或多个侧部件180,每个侧部件都具有一个或多个凸部184和一个或多个凹部186以及与第一元件110和第二元件140的表面协作成允许协作运动的对应表面。
81.转到以沿着中心纵向轴线的剖视图示出椎间装置100的图3和4,驱动机构190包括保持罩帽192和驱动部件194。驱动部件194可包括构造成接纳用于转动控制该部件194的驱动器的驱动点194d。保持罩帽192可固定地安装在第一元件100上以将驱动部件194保持在椎间装置100内并提供允许第二元件140平移的表面力。例如,如图所示,驱动部件194可包括位置更接近第一元件110的近端112的近侧驱动点194d
p
和位置更接近第一元件110的远端114的远侧驱动点194dd。如下文更详细地讨论的,驱动器可经开口130进入,穿过空隙102,并与近侧驱动点194d
p
接合,驱动器的转动引起例如驱动部件194的对应转动。保持罩帽192可包括用于驱动器按需到达远侧驱动点194dd的开口193。
82.驱动部件194包括构造成或适于与第二元件140的螺旋螺纹部140t相接的螺旋螺纹部194t。因此,驱动部件194的转动引起第二部件140的轴向移动。更具体地,如果驱动部件194沿第一方向转动,则第二元件140将沿远侧方向朝向第一元件110的远端114移动,而如果驱动部件194沿相反的第二方向转动,则第二元件140将沿近侧方向朝向第一元件110的近端112移动。由于螺纹194t、140t是连续的,所以第二元件140可定位在沿着第一元件110的纵向轴线的任意点,每个沿着纵向轴线的点都与第三元件170的相应高度对应。
83.具体参照以穿过中央几何平面的剖视图示出椎间装置100的图4,第二元件140包括统称为侧部件150的侧部件150a(未示出)和侧部件150b。如图所示,侧部件150b包括一个或多个凸部154和一个或多个凹部156,凸部154和凹部156与第三元件170的其它结构相接,
使得当第二元件140向远侧平移时,第三元件170至少竖直地移动,从而增大椎间装置100的总高度。例如,凸部154包括与第三元件170的侧部件180d的相邻斜面184d
s3
相接的斜面154
s1
。当第二元件140向远侧移动时,这些斜面154
s1
、184d
s3
的相互作用引起第三元件170的竖直移位。第三元件170也可与第一元件110的斜面相接以进一步促进该竖直移位。例如,第一元件110包括邻近与侧部件180d相关的斜面184d
s1
的斜面110s,斜面110s、184d
s1
的相互作用进一步促进在第二元件140在第一元件110内向远侧平移时第三元件170的竖直移位。
84.现在参照图5a和5b,将更详细地描述第一元件110和第三元件170的相互作用。仅出于说明目的,第二元件140已被移除。此外,虽然该讨论仅考虑了单个侧部件180d,但该讨论同样适用于第三元件170的其它侧部件180。如图所示,侧部件180d包括凸部184d和凹部186d,凸部184d限定有对应的表面184d
s1-s3
。第一元件110在侧部118的内表面上包括凸部124b和凹部126b。凸部124b1包括表面124b1s,并且凸部124b2包括第一表面123b2
s1
和第二表面124b2
s2
,表面184d
s1
与表面124b1s相接并且表面184d
s2
与表面124b2
s1
相接,使得侧部件180d的一部分能够在凹部126b1内并沿着凹部126b1移动。侧部件180d还限定有表面184ds3,该表面184ds3连同侧部件184c的表面184cs1一起与第二元件140的对应表面相接,如下文参照图6所述。
85.转到图6,示出了第二元件140和第三元件170的几何特征结构之间的相互作用,并且仅出于讨论目的已移除了第一元件110。此外,虽然该讨论仅考虑了第二元件140的单个侧部150a及其与第三元件170的侧部件180a、180b的相互作用,但该讨论同样适用于第二元件140的侧部150b及其与第三元件170的侧部件180c、180d的对应相互作用。如图所示,侧部150a包括第一凸部144a1和第二凸部144a2以及第一凹部146a1和第二凹部146a2。第三元件170的侧部件180a包括凸部184a,该凸部184a具有第一侧面184a
s1
和第二侧面184a
s2
。第二元件140的第一凹部146a1包括第一侧面146a1
s1
和第二侧面146a1
s2
。第三元件170的侧部件180a可滑动地接纳在第二元件140的凹部146a1中,表面184a
s1
、184a
s2
分别与表面146a1
s1
、146a1
s2
相接。因此,当第二元件140沿箭头ad大体所示的方向向远侧平移时,侧面146a1
s1
与侧面184a
s1
联接以使第三元件170至少竖直地移动离开第二元件140。类似地,当第二元件140沿箭头a
p
大体所示的方向向近侧平移时,侧面146a1
s2
与侧面184a
s2
联接以使第三元件170至少竖直地朝向第二元件140移动。
86.转到图7,示例性椎间装置200包括第一元件210、第二元件240、第三元件270和驱动机构290。椎间装置200与椎间装置100相似,但装置200的元件210、240、270具有以允许第三元件270在操作时相对于第一元件210的纵向轴线竖直地移动的方式协作的几何特征除外。装置100的元件110、140、170的各个表面协作成允许第三元件170在操作时相对于第一元件110的纵向轴线竖直地以及水平地移动。
87.元件210包括近端212和远端214,以及第一侧部216和第二侧部218。元件210还包括具有一个或多个开口222的底部220。元件210也在近端212处包括开口230,该开口允许医疗工具或治疗剂通向装置200的内部空隙202。第二元件240与元件140相似,具有与第三元件相接的几何结构和表面,以允许第三元件相对于第一元件210的纵向轴线竖直地移动。第三元件270具有适于与生物组织表面接合的表面271,元件270包括与内部空隙202和第一元件210的底面220的一个或多个开口222流体连通的一个或多个开口272。第三元件270还包括具有竖直表面的侧部件280b,以促进第三元件270在被操作时相对于第一元件的竖直移
动。
88.转到图8和9,以沿着中心纵向轴线的剖视图示出了椎间装置200。如图所示,装置200包括驱动机构290,驱动机构290包括保持罩帽292和驱动部件294,与椎间装置100的驱动机构190相似。驱动部件294可包括构造成接纳用于转动控制该部件294的驱动器的驱动点294d。保持罩帽292可固定地安装在第一元件200上以将驱动部件294保持在椎间装置200内并提供允许第二元件240平移的表面力。例如,如图所示,驱动部件294可包括位置更接近第一元件210的近端212的近侧驱动点294d
p
和位置更接近第一元件210的远端214的远侧驱动点294dd。与驱动机构190的操作相似,驱动器可经开口230进入,部分地穿过空隙202,并与近侧驱动点294d
p
接合,驱动器的转动引起例如驱动部件294的对应转动。保持罩帽292可包括用于驱动器按需到达远侧驱动点294dd的开口293。
89.驱动部件294包括构造成或适于与第二元件240的螺旋螺纹部240t相接的螺旋螺纹部294t。因此,驱动部件294的转动引起第二部件240的轴向移动。更具体地,如果驱动部件294沿第一方向转动,则第二元件240将沿远侧方向朝向第一元件210的远端214移动,而如果驱动部件294沿相反的第二方向转动,则第二元件240将沿近侧方向朝向第一元件210的近端212移动。由于螺纹294t、240t是连续的,所以第二元件240可定位在沿着第一元件210的纵向轴线的任意点,每个沿着纵向轴线的点都与第三元件270的相应高度对应。
90.如图9所示,第三元件270包括侧部件280d,该侧部件280d包括相对于第一元件210的纵向轴线垂直的侧面。侧部件280d在操作期间在侧部218的内壁中的对应凹部218d内竖直地移动。转到图10,更详细地示出了椎间装置200的第一元件210和第三元件270的相互作用,第二元件240仅出于讨论目的而被移除。如图所示,侧部件280d可滑动地定位在凹部218d内。还转到图11,示出了第二元件240和第三元件270的几何特征结构之间的相互作用,并且仅出于讨论目的已移除了第一元件210。此外,虽然该讨论仅考虑了第二元件240的单个侧部250a及其与第三元件270的侧部件280a、280b的相互作用,但该讨论同样适用于第二元件240的侧部250b及其与第三元件270的侧部件280c、280d的对应相互作用。如图所示,侧部250a包括第一凸部244a1和第二凸部244a2以及凹部246a。第三元件270的侧部件280a包括凸部284a,凸部284a具有第一侧面284a
s1
和第二侧面284a
s2
。第二元件240的凹部246a包括第一侧面246a
s1
和第二侧面246a
s2
。第三元件270的侧部件280a可滑动地接纳在第二元件240的凹部246a中,表面284a
s1
、284a
s2
分别与表面146a
s1
、146a
s2
相接。因此,当第二元件240如通过箭头ad大体所示向远侧平移时,侧面246a
s1
与侧面284a
s1
联接以使第三元件270竖直地移动离开第二元件240。类似地,当第二元件240沿通过箭头a
p
大体示出的方向向近侧平移时,侧面246a
s2
与侧面284a
s2
联接以使第三元件270朝向第二元件140竖直地移动。
91.转到图12,第三示例性椎间装置300包括第一元件310、第二元件340、第三元件370和驱动机构390。椎间装置300与装置100和200相似,以下除外:当第二元件340向远侧平移时,第一元件310和第三元件370两者都竖直地移动离开第二元件340。转到图13a和13b,椎间装置300被示出为处于扩张构型。如图所示,第二元件340的凸部344构造成与第一元件310中的对应凹部326可滑动地联接。此外,第三元件370的侧部件380的凸部384构造成与第二元件340的对应凹部346可滑动地联接。以与关于第一装置100和第二装置200所述相似的方式,当第二元件通过驱动机构390的操作向远侧平移而形成或扩大空隙302时,元件310、340、370的几何结构和表面协作以使第一元件310和第三元件370两者竖直地移动离开第二
元件340。椎间装置300的构型允许相对于初始高度而言实现装置300的更大总高度。因此,椎间装置300最初可确定尺寸为经例如通过内窥镜法定位的微创装置被输送。一旦定位,椎间装置300便可扩张至期望高度。转到图13c,在装置300处于扩张构型的情况下并且由于元件310、340、370的几何结构的特定设计,可实现大的空隙302。该空隙302然后可被治疗剂充填,以促进装置300周围(和附近)的愈合和/或骨生长。
92.现在转到图14和15,将描述与椎间装置300的操作有关的其它信息。图14以剖视图并以塌缩构型示出装置300,而图15以剖视图并以扩张构型示出装置300。如图所示,椎间装置300包括替换元件310a,第二元件的远侧部分在该替换元件310a内平移。元件310a可相对于第一元件310和第三元件350竖直地滑动。与驱动机构190一样,驱动部件394包括与第二元件340的对应螺旋螺纹340t相接的螺旋螺纹394t。驱动部件沿第一方向的转动引起第二元件340相对于元件310a的远侧移动。驱动部件沿相反的第二方向的转动引起第二元件340相对于元件310a的近侧移动。第二元件340包括多个凸部344b1-344b3以及多个凹部346b1-346b3,这些凸部和凹部以与上文关于椎间装置100和200所述相似的方式与第三元件370的对应凹部和凸部相接或联接。第二元件340在侧部件340b的对向表面上包括另外的多个凸部344d和凹部346d,这些凸部和凹部分别与对应的凸部324b1-b3和凹部326b1-b2相接或联接。与本文中描述或讨论的其它椎间装置一样,元件310、340、370的凸部和凹部协作成使得,当第二元件340向远侧平移时,凸部和凹部的各个表面相接或联接成使得第一元件310至少竖直地移动离开第二元件340,并且第三元件370至少竖直地沿相反的方向移动离开。在椎间装置300处于扩张构型的情况下,空隙302被最大化,从而允许将治疗剂布置在其中,治疗剂离开各种开口如开口372、322,以促进装置300周围或附近的骨生长。当第二元件340沿近侧方向平移时,元件310、340、370的凸部和凹部协作而呈现更塌缩的构型。
93.现在转到图16,输送系统400可用于将椎间装置100、200、300或本文中讨论或构想的任意其它椎间装置定位在两个相邻椎骨之间并且按需调节对应的装置100、200、300的高度。虽然关于图18-21所示的椎间装置100a示出和讨论输送系统400,但这种讨论和对应的操作适用于任意椎间装置或本文中讨论或构想的任意其它椎间装置。输送系统400包括手柄402、操作控制器404和终止于远侧部分408的长形部分406。输送系统400的远侧部分408构造成与椎间装置如装置100a接合并将其定位在患者体内。第一操作控制器404a与在长形部分406内从控制器404a延伸到远端408的第一长形部件410a(未示出)联接,长形部件410a的远端构造成将输送系统400与椎间装置100a联接。第二操作控制器404b与在长形部分406内从控制器404b延伸到远端408的第二长形部件410b(未示出)联接,长形部件410b的远端构造成操作所述椎间装置100a,例如调节装置100a的高度。
94.转到图17,长形部件410a终止于远侧部分408处的螺纹部410at,而长形部件410b终止于包括远侧驱动器412d的远侧部分412。长形部件410a与长形部件410b可转动、可滑动地联接。远侧部分408也可包括用于接合作为椎间装置110a的一部分的相似配合结构——例如,如图18所示的一个或多个配合结构134——的一个或多个配合结构420。配合结构420、134使得输送系统400能够相对于装置110a维持期望的取向。远端408也可包括更多接合结构,例如长形部件410a的螺纹部410at,以在装置110a的定位期间维持对其的保持。远侧部分412的远侧驱动器412d可构造成进入椎间装置100a内的空隙并与驱动部件如驱动机构190a的驱动部件194联接。
95.转到图19,第一控制器404a的操作可用于使长形部件410a的螺纹部410at转动,螺纹部410at与椎间装置100a的第一元件110a的螺纹部130t相接以将装置100a固定地安装在输送系统400上。一旦装置100a在体内定位在例如相邻椎骨之间,第二控制器404b便可被操作以使装置400的驱动器412d转动,驱动器412d的转动用于使驱动部件194a转动,从而引起椎间装置100a的总高度h的调节,如上文关于椎间装置100所述的那样。还转到图20,图20示出了处于扩张构型的椎间装置100a,第二元件140正向第一元件110a的远端移动。
96.现在转到图21,替代性输送系统400a与图16的输送系统400相似,但包括操作可偏转的远侧部分408a的第三控制器404c。转到图22,控制器404c经与螺纹部406at相接的螺纹部404ct与长形部件406a联接。控制器404c还与长形部件410c的近端联接。长形部件406经铰链416与远侧部分408a联接。长形部件410c的远端经铰链418与输送系统400a的远侧部分408a联接。远侧部分408a还经齿轮414与长形部件410a的中央内腔联接。因此,控制器404c的转动转换为长形部件410c的轴向移动,这使远侧部分408a相对于长形部件406a偏转,如图23所示。长形部件410a可包括止挡部420以阻止或限制长形部件410c的轴向移动,这最终限制了远端408a的偏转。
97.图24示出了偏转的远侧部分408a以及终止于远侧部分412和驱动器412d的长形部件410b的安置。如图所示,远侧部分408a包括构造成与椎间装置如装置100上的对应凹部接合的一个或多个凸部420a。长形部件410b可包括在齿轮414附近定位成使得部件410b利用远侧部分408a的偏转而弯曲的柔性部分。图25示出与示例性椎间装置如椎间装置100相接的输送系统400a。仅出于图示目的,已移除了长形部件410b。在操作时,长形部件410b的远端412的驱动器412d将与椎间装置的驱动部件相接,输送系统400a调节椎间装置的高度,如上所述。
98.转到图26和27a,示例性椎间装置500的透视图包括第一元件510、第二元件540和第三元件570。如在以下讨论中将更好地理解的,元件510、540、570协作成使得椎间装置500的几何高度可具有下文更详细地讨论并且如图26大体所示的最小塌缩构型和如图27a大体所示的最大扩张构型。
99.也称为基部510或基部元件510的第一元件510构造成提供用于椎间装置500的基部或外部结构,并且包括第一端部512、第二端部514和两个侧部,即第一侧部516和对向的侧部518。底部520包括允许包含骨生长促进材料的治疗剂或材料从其中通过的一个或多个开口522。应当容易地理解的是,第二元件540和第三元件570也可包括类似开口。近端如端部512可包括用于供一个或多个工具的一部分通过的开口530,所述工具用于输送所述治疗剂,或者使椎间装置500扩张、收缩或将其锁定在特定构型,如下文参照图30a-30c更详细地讨论的。
100.椎间装置500可扩张或收缩至第一塌缩高度h
5-1
和第二扩张高度h
5-2
之间的任意合适的高度h,分别参照图26和27a所示。例如,椎间装置500可从具有图26中的高度h
5-1
的第一位置扩张至具有图27a中的高度h
5-2
或其间的任意高度的第二位置,并锁定在任意位置。如上所述,结合椎间装置500或本文中描述或构想的其它椎间装置使用的术语“锁定”、“被锁定”或“锁止”应当是指大致维持各元件510、540、570相对于彼此的位置。端部512也可包括允许提供在输送系统上的附接点的结构如螺纹结构530t,例如,如上文关于椎间装置100所述的那样。这种附接点也可形成用于至少初始地定位椎间装置500——例如将装置500定位
在两个相邻椎骨之间——的基础。元件510、540、570构造成在椎间装置500内形成空隙502,空隙502在椎间装置500例如从塌缩构型扩张至扩张构型期间扩大。在另一些输送系统的实施例中,输送系统可包括管状部件,例如,治疗剂可经所述管状部件被引导到椎间装置500内的内部空间或空隙并经元件510的一个或多个开口522或其余元件540、570的类似开口离开。这样,这种治疗剂可与周围组织(如椎骨的骨组织)接触。
101.第三元件570与第一元件510可滑动地相接,使得第三元件570至少相对于第一元件510竖直地滑动。第三元件570可在其顶部或顶面571中包括一个或多个开口572以允许治疗剂从其中通过或被引导。顶部571可包括一个或多个凸部574,凸部574可有助于保持顶部571相对于相邻的结构或生物组织如椎骨结构固定不动。虽然仅示出了一些凸部574,但可采用更多或更少的凸部574。此外,此类凸部如凸部574可由任意生物相容性材料并呈任意合适的形式构成,并且可与椎间装置500或本文中描述或构想的任意其它椎间装置的其它元件或表面联用。例如,元件510的侧壁516、518可包括与凸部574相似的一个或多个凸部(未示出),并且基部510的底部520可包括与凸部574相似的一个或多个凸部。
102.具体转到图27a,元件510可包括定位结构或凸部524,该定位结构或凸部524可构造成或适于在设置于元件570中的对应通道576内移动以确保元件570沿相对于元件510的特定方向移动。因此,通道576和相关结构524可构造成与元件510的纵向轴线形成任意期望角度。如图所示,通道574与元件510的纵向轴线大致垂直,因此,元件570沿与元件510的纵向轴线大致垂直的方向移动。
103.转到图27b,示出了从第一端部512看去的处于扩张构型的椎间装置500。元件510、540、570构造成使得在处于扩张构型时限定出例如如透过开口530或开口572所看到的开放的空间或空隙502。这样,一旦装置500被布置,治疗剂便可从第一端部512到第二端部514定位在空隙502内并进入其它元件540、570的空隙。这种材料还可经由定位在元件510、540、570周围的附加开口如开口572和522从开放的空间流出。
104.转到图28,示出了以剖视图描绘元件510、540、570的立视图。第三元件570可包括构造成或适于与第二元件540的多个斜面548中的相应一个斜面接触的多个斜面578。因此,当第二元件或滑动元件540在元件510的第一端部512和第二端部514之间平移时,斜面548与第三元件570的相应斜面578接触并沿着其滑动而引起元件570沿由通道574和斜面548、578限定的方向移动。如图所示,滑动元件540从第一端部512朝向第二端部514的平移引起元件570沿竖直方向移动离开基部元件510。滑动元件540从第二端部514朝向第一端部512的平移引起元件540沿竖直方向朝向基部元件510移动。
105.第一元件510或基部元件510包括从元件510的底部520的顶部内表面突出的多个接合元件536。第二元件540包括多个接合元件550,至少一个该接合元件550与多个接合元件536中的相应一个接合元件接合。虽然被示出为与相应元件510、540一体化,但接合元件536、550可以是分别安装或固定在基部元件510和滑动元件540的表面上的单独部件。接合元件536、550被示出为具有类似形状,例如三角形部分,但在其它构型中,所述形状可以不相似。例如,各个接合元件550可包括凹面,而各个接合元件536可包括对应的匹配凸面。例如,接合元件536、550的形状也可以是不匹配的表面,使得例如在接合元件536、550之间的相接处存在间隙。此外,虽然被图示为三角形结构,但各元件536、550可沿着其从各元件536、550的末端通过的竖直中心轴线是不对称的。
106.椎间装置500构造成使得向滑动元件540施加侧向力以使元件540在基部元件510的第一端部512和第二端部514之间平移会引起各接合元件550在对应的接合元件536上滑动并滑过,并沿滑动元件540的移动方向与相邻的接合元件536接合。因此,滑动元件540虽然主要沿着基部元件510的纵向轴线移动,但也分别根据滑动元件540和基部元件510的接合元件550、536的几何外形和联接而竖直地移动。
107.返回图26和27a,多个销544与滑动部件540联接并延伸穿过基部元件510的侧部516、518中的对应开口528。在椎间装置500如图26所示处于塌缩构型的情况下,滑动元件540更接近第一端部512,销544也更接近第一端部512。在椎间装置500如图27a所示处于扩张构型的情况下,滑动元件540更接近第二端部514,销544也更接近第二端部514。第一元件510的开口523间隔开,以允许滑动元件540和销544根据接合元件550、536的几何形状(如高度)的一定竖直行程。注意,通过调节接合元件550、536的各侧面的斜率,用于在元件570的顶部571和基部元件510的底部520之间存在压缩力的情况下使滑动元件540移动的平移力可根据对应的元件550、536的斜面而不同。接合元件550、536的可以是连续的或不连续的各侧面的斜率可配置成促进滑动元件540在沿着基部510的纵向轴线的第一方向上的移动并且阻碍滑动元件540沿相反的第二方向的移动。在任意情况下,接合元件550、536例如构造成具有合适的斜面等以在第三元件570和基部元件510之间存在压缩力时变得锁定或不可移动。
108.现在转到图29,示出了处于扩张构型的椎间装置500。在向滑动元件540施加侧向力而使元件540朝向端部514移动的情况下,接合元件550、536例如以棘齿啮合方式与相邻的对向接合元件550、536连续地接合和脱离。当元件540平移时,第三元件570竖直地移动以增加装置500的总高度。在例如当装置500定位在相邻的组织表面如两个相邻椎骨之间时在第三元件570和基部元件510之间施加压缩力的情况下,滑动元件540和基部元件510的接合元件550、536分别接合并阻止滑动元件540进一步平移。
109.转到图30a-30c,用于使滑动元件540或本文中讨论或描述的类似滑动元件平移的示例性工具600包括远端602,该远端602具有与沟槽606相邻的凸部604。该凸部适于与滑动元件540的近端处的沟槽566配合。如图30a所示,工具600沿着其轴线倾斜或转动,使得凸部604自由地进入滑动元件540的近端,如图30b所示。一旦插入,工具600便可沿箭头30a所示的方向转动,使得凸部604定位在滑动元件540的近端的沟槽566内并通过凸部604与滑动元件540的近端处的凸部567的协作而被保持就位,如图30c所示。
110.滑动元件540的沟槽566与工具600的凸部604协作以将工具600刚性地安装在元件540上。一旦工具600刚性地安装在滑动元件540上,使用者便可通过工具600的相应平移来使滑动元件540平移。如上所述,引起滑动元件540的平移的工具600的平移进一步引起滑动元件540在基部元件510的端部512、514之间移动。当滑动元件540在端部512、514之间平移或移动时,元件570相对于基部元件510沿竖直方向移动以改变椎间装置500的总高度h。如应当容易地理解的,工具600可从身体结构内的点延伸到体外的点。
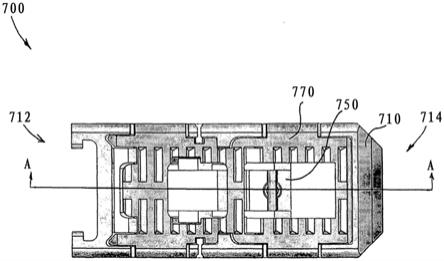
111.现在转到图31,另一示例性椎间装置700包括第一或基部元件710、第二或滑动元件750和第三元件770。椎间装置700与椎间装置500相似,但与椎间装置500相比装置700的元件710、740、770包括不同的几何结构。椎间装置700包括远端712和近端714,远端712包括用于定位和操作装置700的不同的几何结构。
112.转到图32和33,在沿着图31的截面a-a的剖视图中示出了示例性椎间装置700的透视图。与本文中描述或构想的其它椎间装置一样并且根据以下讨论更好理解的,元件710、740、770协作成使得椎间装置700的几何高度h7可具有在下文中更详细地讨论并且如图32大体所示的最小塌缩构型和如图33大体所示的最大扩张构型。
113.也称为基部710或基部元件710的第一元件710构造成提供用于椎间装置700的基部或外部结构,并且包括第一端部712、第二端部714和两个侧部,即第一侧部716和对向的侧部718。底部720包括允许治疗剂从其中通过的一个或多个开口722。应当容易地理解的是,第二元件740和第三元件770也可包括类似开口。近端712可包括用于供一个或多个工具的一部分通过的开口730,所述工具用于输送所述治疗材料,或者使椎间装置700扩张、收缩或将其锁定在特定构型。
114.椎间装置700可扩张或收缩至第一塌缩高度h
7-1
和第二扩张高度h
7-2
之间的任意合适的高度h7,分别参照图32和33所示。例如,椎间装置700可从具有图32中的高度h
7-1
的第一位置扩张至具有图33中的高度h
7-2
的第二位置或其间的其它位置,并锁定在该位置。近端712也可包括允许提供在输送系统(未示出)上的附接点的结构,例如如下文关于图38的输送装置800所述的凸部730p和沟槽730g。这种附接点也可形成用于至少最初将椎间装置700定位在例如两个相邻椎骨之间的基础。如下文更详细地描述的,输送系统800可包括管状部件,例如,治疗剂可经所述管状部件被引导到椎间装置700内的内部空间并经元件710的一个或多个开口722或其余元件740、770的类似开口离开。这样,这些制剂或材料可与周围组织如骨组织接触。
115.第三元件770与第一元件710可滑动地相接,使得第三元件770至少相对于第一元件710竖直地滑动。第三元件770可在其顶部771中包括一个或多个开口772以允许治疗元件或骨生长促进材料从其中通过或被引导。顶部771可包括一个或多个凸部774,凸部774可有助于保持顶部771相对于相邻的结构或生物组织如椎骨结构固定不动。虽然仅示出了一些凸部774,但可采用更多或更少的凸部774。这些凸部结构774可由任意生物相容性材料并呈任意合适的形式构成并且可适用于本文中描述或构想的任意实施例。此外,元件710的侧壁716可包括一个或多个凸部(未示出),并且基部710的底部720可包括一个或多个凸部721。凸部721例如可与凸部774相似,可有助于保持底部720相对于相邻的结构或生物组织如椎骨结构固定不动。
116.具体转到图33,元件710可包括与装置500的基部元件510的凸部524相似的定位结构或凸部,该定位结构或凸部可构造成或适于在与设置于装置500的元件570中的通道576相似的对应通道内移动以确保元件770相对于元件710沿特定方向移动。因此,与装置500一样,该通道和相关结构可构造成相对于元件710的纵向轴线形成任意期望角度。元件770的通道与元件710的纵向轴线大致垂直,因此,元件770沿与元件710的纵向轴线大致垂直的方向移动。
117.与椎间装置500一样,空隙或空间702由椎间装置700的第一元件710、第二元件740和第三元件770限定,该空隙随着装置700从塌缩构型转变为扩张构型而扩大。这样,一旦装置700被布置好,治疗剂便可从第一端部712到第二端部714定位在空隙702内。这些制剂还可经由定位在元件710、740、770周围的附加开口如开口772和722从开放的空间流出。
118.回到图32和33两者,第三元件770可包括构造成或适于与第二元件740的多个斜面
748中的相应一个斜面接触的多个斜面778。因此,当第二元件或滑动元件740在元件710的第一端部712和第二端部714之间平移时,斜面748与第三元件770的对应各斜面778接触并沿着其滑动,从而引起元件770沿例如由第一元件710和第三元件770之间的通道和壁结构限定的竖直方向移动。如图所示,滑动元件740从第一端部712朝向第二端部714的平移引起元件770沿竖直方向移动离开基部元件710。滑动元件570沿从第二端部714朝向第一端部712的方向的平移引起元件740沿竖直方向朝向基部元件710移动。
119.第一元件或基部元件710包括从元件710的底部720的顶部内表面突出的多个接合元件736。第二元件740包括多个接合元件750,至少一个元件750与多个接合元件736中的相应一个接合元件接合。虽然被示出为与相应元件710、740一体化,但接合元件736、750可以是分别安装或固定在基部元件710和滑动元件740的表面上的单独部件。与椎间装置500的接合元件536、550一样,接合元件736、750被示出为具有相似形状,例如三角形部分,但在其它构型中,所述形状可以不相似,或可沿着其从各元件736、750的末端通过的竖直中心轴线不对称。
120.与椎间装置500一样,椎间装置700构造成使得向滑动元件740施加侧向力以使滑动元件740在基部元件710的第一端部712和第二端部714之间平移会引起各接合元件750在对应的接合元件736上滑动并滑过,并沿滑动元件740的移动方向与相邻的接合元件736接合。因此,滑动元件740虽然主要沿着基部元件710的纵向轴线移动,但也分别根据滑动元件740和基部元件710的接合元件750、736的几何外形和联接而竖直地移动。
121.椎间装置700还包括与滑动部件740联接并延伸穿过基部元件710的侧部716、718中的对应开口728的多个销745。在椎间装置700如图32所示处于塌缩构型的情况下,滑动元件740更接近第一端部712,销745也更接近第一端部712。在椎间装置700如图33所示处于扩张构型的情况下,滑动元件740更接近远端或第二端部714,销745也更接近第二端部714。第一元件710的开口728间隔开,以允许滑动元件740和销745根据接合元件750、736的几何形状(如高度)的一定竖直行程。注意,通过调节接合元件750、736的各侧面的斜率,用于在元件770的顶部771和基部元件710的底部720之间存在压缩力的情况下使滑动元件740移动的平移力可根据对应的元件750、536的斜面而不同。接合元件750、736的可以是直线形的或非直线形的各侧面的斜率可配置成促进滑动元件740在沿着基部710的纵向轴线的第一方向上的移动并阻碍滑动元件740沿相反的第二方向的移动。在任意情况下,接合元件750、736例如构造成具有合适的斜面等以在第三元件770和基部元件710之间存在压缩力时变得锁定或不可移动。
122.具体转到图33,滑动元件740可包括构造成或适于沿着第三元件770的内壁与对应的凹部或沟槽736a可滑动地相接的凸部744。凸部744与凹部736a协作成使得,当滑动元件740沿近侧方向——例如沿朝向椎间装置的近端712的方向——平移时,凸部744的表面与凹部736a的表面接合以促进第三元件770朝向第一元件710竖直地移动。
123.与椎间装置500一样,在存在施加至滑动元件740而使元件740朝向端部714移动的侧向力的情况下,接合元件750、736例如以棘齿啮合方式与相邻的对向接合元件750、736连续地接合和脱离。当元件740平移时,第三元件770竖直地移动以增加装置700的总高度h7。在例如当装置700定位在相邻的组织表面如两个相邻椎骨之间时压缩力施加在第三元件770和基部元件710之间的情况下,滑动元件740和基部元件710的接合元件750、736分别接
合并阻止滑动元件740进一步平移。例如,仅出于图示目的,椎间装置700的滑动元件740可通过使用工具(如上文关于椎间装置500所述的示例性工具600)而平移,滑动元件740的远侧部分包括与工具600相接的凸部和沟槽。
124.转到图34和35,椎间装置700以沿着图31的截面a-a的剖视图被示出。椎间装置700在图34中被示出为处于塌缩构型并且在图35中被示出为处于扩张构型。特别地,滑动元件740包括有助于分别维持滑动元件740和基部元件710的接合元件750、736之间的接触的装置760。保持装置760包括销745a和弹簧747,弹簧747在内孔748内就位。如图所示,销745a可从侧部716中的第一开口723延伸到侧部718(未示出)中的第二开口723,与图1的椎间装置的开口128相似。销745a包括从销745a的中心纵向轴线朝向第一元件710的底部720延伸的凸部762。在操作时,当滑动元件740在两个端部712、714之间平移时,接合元件750、736反复接合和脱离,从而使得滑动元件740反复离开和朝向基部元件710的底部720竖直地移动,如上文关于椎间装置500所述。当滑动元件740移动离开基部元件710时,销745a的端部与相应侧部716、718中的对应开口723的顶面接合,从而用于压缩弹簧747。当滑动元件740的接合元件750越过基部元件710的对应接合元件736时,弹簧在滑动元件740上施力以促进相邻的接合元件750、736的再接合。这样,接合元件750在滑动元件740的特别是在无负荷状况下(其中第三元件770和第一元件710之间的力例如最小)的各次移动期间被偏压成保持与对应的接合元件736联接。因此,当压缩力施加在第三元件770的顶面771和基部元件710的底面720之间时,接合元件750、736维持全部三个元件710、740、770的当前位置并最终维持椎间装置700的当前高度h7。
125.转到图36,用于定位和操作椎间装置700或本文中描述或构想的其它椎间装置的输送系统800包括附接组件810和扩张工具860。附接组件810用于将椎间装置如椎间装置700附接在输送系统800上。扩张工具860用于一旦装置700已被布置在例如相邻椎骨之间便设定椎间装置700的高度。转到图37,附接组件810包括接口单元812、控制组件820、抓握单元840和从控制组件820延伸到抓握单元840的长形部件814。接口单元812构造成将附接组件810附接在扩张工具860上,如下文更详细地讨论的。长形部件814可在其中包括用于控制抓握单元840或椎间装置700的一个或多个内腔或部件。
126.转到图38-41,将更详细地描述抓握单元840的操作。抓握单元840包括具有第一槽842
s1
和第二槽842
s2
的壳体842以及与第一臂846a和第二臂846b操作联接的控制环844。长形部件814经由销815与壳体842固定地联接。长形部件816穿过长形部件814的内腔,并且包括与控制环844的螺纹部844t转动地联接的螺纹部816t。长形部件816的转动通过螺纹部816t、844t变换为控制环844的轴向移动。第一臂846a包括分别定位在槽842a
s1
、842a
s2
内的第一凸部846a
p1
和第二凸部846a
p2
,以及位于臂846a的远侧末端处的第三凸部846a
p3
。类似地,第二臂846b包括分别定位在槽842b
s1
、842b
s2
内的第一凸部846b
p1
和第二凸部846b
p2
,以及位于臂846b的远侧末端处的第三凸部846b
p3
。如图38所示,臂846a包括构造成与壳体842的表面接合的突起部848a。更具体地,突起部848a包括构造成与壳体的表面843as接合的表面848as。类似地,臂846b包括具有构造成与壳体842的表面843as接合的表面848as的突起部848b。因此,当壳体842相对于臂846a、846b向远侧移动时,凸部846a
p3
、846b
p3
之间的距离增大。
127.图38和39示出处于打开构型的臂846a、846b,而图40和41示出处于闭合构型的臂
846a、846b,臂846a、846b在打开构型中比在闭合构型中彼此更接近。在操作时,长形部件816沿第一方向的转动引起控制环844如箭头816a所示的轴向移动。由于控制环844与臂846a、846b联接,所以各臂沿与控制环相同的方向移动,并且表面848as、848bs与壳体842的表面843as、843bs协作以使各臂彼此移动分开,例如转变为闭合构型。控制环的持续轴向移动使得臂846a、846b轴向地移动以夹持在近侧特征结构730pa和730pb上。长形部件816沿与第一方向相反的第二方向的转动引起控制环844沿与箭头816a所示的方向相反的方向的轴向移动。当控制环844相对于壳体842以及臂846a、846b向远侧移动时,凸部846a
p3
、846b
p2
的远侧表面与槽842
s2
的远侧部分接合或协作以使各臂向内偏转。因此,臂846a、846b相对于壳体842向远侧移动得越多,远侧凸部846a
p3
、846b
p3
向远侧和朝向彼此移动得越多,从而与附接点分离并从椎间装置700的凸部730pa和730pb的轮廓脱离。
128.转到图42a-42c,示出了控制环844、臂846a、846b和长形部件816之间的相互作用。控制环844包括第一和第二“t”形槽845,其各自都与臂846a、846b中的一者的近端联接,如图42b所示。槽845和臂846a、846b之间的联接点允许远侧凸部846a
p3
、846b
p3
朝向和离开彼此移动以实现用于联接在臂846a、846b和椎间装置700之间的位置。图42c示出与长形管816可转动地联接的控制环844。
129.转到图43,接口单元812固定地附接在控制组件820上,控制组件820固定地附接在长形部件814上。控制组件820包括可转动的控制器824、离合器组件826和弹簧828。可转动的控制器824可转动地安装在作为离合器组件826的一部分的离合器部件826a上。离合器部件826b可转动地安装在长形部件816上。弹簧828提供力以促进离合器部件826a和离合器部件826b之间在指形部826f处的联接。所述指形部构造成使得可转动的控制器824沿第一方向的转动导致指形部的恒定接合,并且可转动的控制器824沿与第一方向相反的第二方向的转动使得一旦转矩变得大于由弹簧826在离合器部件826a上施加的力,离合器部件826a的指形部便滑过离合器部件826b的指形部。这样,可转动的控制器824沿第二方向的转动引起臂846a、846b与椎间装置700的附接点的联接,而不会过度紧固所述连接,这可能会引起输送系统800或椎间装置700或这两者中的不当应力。
130.转到图44,扩张工具860包括手柄或手柄部862和与手柄862可转动地联接的长形轴。扩张工具860用于使第二元件例如椎间装置700的第二元件730沿着第一元件710的纵向轴线移动以一旦装置700已被布置在例如相邻椎骨之间便设定椎间装置700的高度。
131.转到图45a和45b,手柄部862包括接口组件870和附接控制器880。接口组件870构造成将手柄部862附接在附接组件810上或使两者相接。更具体地,接口组件870与附接组件810的接口元件812相接。接口组件870在手柄862的槽部873中包括按钮872。按钮872由定位在手柄862的内孔864内的弹簧874偏压。具体参照图45a,当按钮872被压下而压缩弹簧874时,附接组件810的接口元件812可定位在手柄862内的开口内。接口元件812包括尺寸确定为等于或大于按钮872的宽度的缺口812n,使得一旦接口元件812定位在开口866内,便可释放按钮872并且按钮872的一部分872a定位在缺口812n内,如图45b所示。
132.附接控制器880用于使第二元件如元件730与长形轴900接合。控制器880包括与轴900可转动地联接的杆件882,该杆件882构造成使轴转动以实现轴900与第二元件740的接合。控制器880还可包括滑动锁件884,该滑动锁件884构造成锁定杆件控制器882,以使得轴900在例如椎间装置的操作期间维持在期望的转动取向上。
133.转到图46a和46b,长形轴900的远端902包括与沟槽906相邻的凸部904。凸部904可适于配合在位于滑动元件740的近端处的对应沟槽740g内。如图46a所示,轴900沿着其轴线倾斜或转动,使得凸部904自由地进入滑动元件740的近端。一旦插入,轴900便可通过例如对附接控制器880的操作而转动,使得凸部904定位在沟槽740g内并通过凸部904和位于滑动或第三元件740的近端处的凸部740p的协作而被保持就位,如图46b所示。
134.滑动元件740的沟槽740g与轴900的凸部904协作以将轴900刚性地附接在元件740上。一旦轴900刚性地安装在滑动元件740上,使用者便可通过轴的相应平移来使滑动元件740平移。转到图47和48,手柄862还可包括构造成使轴900沿近侧和远侧方向平移的轴向控制器890。轴向控制器890包括转动控制器892,该转动控制器具有与手柄862的对应螺纹部862t相接的螺纹部894,轴向控制器890与轴900联接。轴900与转动控制器892轴向地联接而不是转动地联接。因此,轴向控制器890将控制器892的转动变换为轴900的轴向移动。当转动控制器892沿第一方向转动时,控制器892在手柄部内向远侧移动,这用于使轴900向远侧移动。当转动控制器892沿第二方向转动时,控制器892在手柄部内向近侧移动,这用于使轴900向近侧移动。轴900的平移引起滑动元件740的平移,从而进一步引起滑动元件740在基部元件710的端部712、714之间移动。当滑动元件740在端部712、714之间平移或移动时,元件770相对于基部元件710沿竖直方向移动以改变椎间装置700的总高度h。
135.本文中描述的椎间装置可由任意合适的生物相容性材料制成,所述材料包括但不限于金属、金属合金(例如不锈钢)和聚合物(例如聚碳酸酯),并且可使用任意适当的工艺如螺旋加工或模制(例如注射模制)形成。本文中的椎间装置可针对具有约12mm以下的操作内腔的微创手术来确定尺寸。
136.应当理解,本文中描述的上述椎间装置中的任一者的特征可视情况适用于上述椎间装置中的任意其它椎间装置。本文中描述的椎间装置可由任意合适的生物相容性材料制成,所述材料包括但不限于金属、金属合金(例如不锈钢)和聚合物(例如,聚碳酸酯),并且可使用任意适当的工艺如螺旋加工或模制(例如注射模制)形成。本文中的椎间装置可针对具有约12mm以下的操作内腔的微创手术来确定尺寸。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1