一种七自由度串并联式上肢外骨骼康复机器人
1.本发明涉及康复机器人领域,特别是涉及一种七自由度串并联式上肢外骨骼康复机器人。
背景技术:
2.心脑血管疾病,如脑卒中、脑血栓等一直以来都是造成中国人死亡的一个重要原因,尤其是相对于中老年人。而随着人口老龄化的不断加剧和生活节奏的不断加快,心脑血管疾病的发病率也逐年上升。然而大部分上肢功能障碍的患者都无法对自己上肢进行有效的控制,这不仅对患者身心造成了巨大伤害,而且还对家庭及日常生活都有巨大的影响。
3.临床医学研究表明,上肢功能障碍的患者通常需要反复的康复训练,才能对人体运动功能的恢复齐大东至关重要的作用。目前传统的康复训练是通过治疗师对人体上肢进行康复训练,这种训练过程单调、训练效率低、人力资源消耗大以及治疗费用较高等缺点,难以保证康复训练的稳定性和持续性,因此急需辅助上肢治疗的康复机器人来解决以上问题。
4.目前现有的上肢康复机器人大部分能实现的自由度都少于康复训练所需要的自由度数量且为刚性结构。除此之外,现有的康复机器人忽略了人体关节骨骼肌肉的运动特点,在进行肩关节内收/外展运动时,现有的上肢康复机器人需要将手臂展开才可以完成该运动,影响了患者的康复效率与使用的舒适性,严重可能导致关节的二次损伤,而且一些上肢康复机器人将旋转运动设计在人体肘关节上侧,虽然也可以完成旋内、旋外运动,但是只能训练到大臂的部分肌肉如肱二头肌、肱三头肌等,训练不到前臂处的部分肌肉如旋前圆肌、肱桡肌等;同时,还存在装置重量大、空间利用率低、难以移动的缺点。
技术实现要素:
5.针对上述现有技术的不足,提出了一种七自由度串并联上肢外骨骼康复机器人,可以对人体上肢肩、肘、腕三个关节运动功能受损的患者进行康复训练,满足患者上肢康复训练的自由度需求。在患者进行肩关节康复训练时,可以满足肩关节的三个自由度,同时在进行肩关节的内收/外展运动时,不需要像其他上肢康复机器人先完成肩关节前屈,旋外运动在完成内收/外展运动,本发明设计的康复机器人可直接完成肩关节的内收/外展运动,整体结构更为便捷,提高了空间利用率;将旋内旋外运动设计在腕关节处,可以更好的训练到大臂的部分肌肉如肱二头肌、肱三头肌等以及前臂桡骨、尺骨处的部分肌肉如旋前圆肌、肱桡肌等;同时,腕关节部分采用柔性并联机构,在机构中加入柔性绳和弹簧,一方面使腕关节并联机构增加了柔性,降低了患者康复训练时受到二次伤害的风险,另一方面该并联机构可以由两根柔性绳就可以完成腕关节的桡/尺屈以及掌/背屈运动,在患者进行腕关节康复训练时,可以完成腕关节的三个自由度,使患者可以全方位的、更好的对腕关节进行康复训练,从而提高康复过程的舒适度和康复效率。
6.为了达到上述目的,本发明提供了一种七自由度串并联式上肢外骨骼康复机器
人,包括驱动机构(1)、基座(2)、肩关节外骨骼机构(3)、肘关节外骨骼机构(4)、腕关节外骨骼机构(5)。
7.进一步的,所述驱动机构(1)包括底板(201)、电机1(202)、电机支架1(203)、缠绳盘1(204)、控制器1(205)、电机2(206)、电机支架2(207)、缠绳盘2(208)、控制器2(209)、所述电机1(202)与所述电机支架1(203)固定连接,所述电机支架1(203)与所述底板(201)连接,所述缠绳盘1(204)与所述电机1(202)固定连接,所述控制器1(205)与所述底板(201)固定连接,所述电机2(206)与所述电机支架2(207)固定连接,所述电机支架2(207)与所述底板(201)固定连接,所述缠绳盘2(208)与所述电机2(206)固定连接,所述控制器2(209)与所述底板(201)固定连接。
8.进一步的,所述肩关节外骨骼机构(2)包括减速器1(301)、电机3(302)、竖直短板(303)、l型连接板1(304)、横连接板(305)、电机4(306)、减速器2(307)、l型连接板2(308)、外壳体(309),所述电机3(302)与所述减速器1(301)固定连接,所述减速器1(301)输出端与所述竖直短板(303)固定连接,所述竖直短板(303)与所述l型连接板1(304)活动连接,所述l型连接板1(304)和所述l型连接板2(308)与所述横连接板(305)活动连接,所述电机4(306)和所述减速器2(307)固定连接,所述减速器2(307)输出端与所述横连接板(305)固定连接,所述外壳体(309)与所述l型连接板2(308)固定相连。
9.进一步的,所述电机3(302)驱动l型连接板1(304)相对于竖直短板(303)转动,实现肩关节的内收/外展运动;通过电机4(306)驱动l型连接板2(308)相对于横连接板(305)转动,实现肩关节旋内/旋外运动。
10.进一步的,所述肩关节前屈/后伸机构包括电机5(310)、减速器3(311)、联轴器(313)、水平轴1(314)、带轮1(315)、皮带(316)、平行连杆1(317)、轴承1(318)、轴承2(312)、水平轴2(319)、带轮2(320)、轴承3(321)、平行连杆2(322)、竖直连杆(323)、短连接杆(324),所述电机5(310)与所述减速器3(311)固定连接,所述减速器3(311)与所述外壳体(309)固定连接,所述联轴器(313)与所述减速器3(311)输出轴和所述水平轴1(314)通过键/键槽连接,所述带轮1(315)与所述水平轴1(314)通过键/键槽连接,所述平行连杆1(317)与所述水平轴1(314)通过键/键槽连接,所述水平轴1(314)与所述轴承1(318)固定连接,所述轴承1(318)与所述外壳体(309)固定连接,所述轴承2(312)和轴承3(321)与所述外壳体(309)固定连接,所述水平轴2(319)与所述轴承2(312)和所述轴承3(321)固定连接,所述水平轴2(319)与所述带轮2(320)和所述平行连杆2(322)通过键/键槽连接,所述皮带(316)与所述带轮1(315)和所述带轮2(320)构成同步带传动,所述竖直连杆(323)与所述水平连杆1(317)和水平连杆2(322)活动连接,所述短连接杆(324)与所述竖直连杆(323)固定连接。
11.进一步的,所述电机5(310)驱动水平轴1(314)运动,通过同步带传动带动水平轴2(319)同步转动,实现肩关节前屈/后伸运动。
12.进一步的,所述所述肘关节外骨骼机构包括半圆环上臂连接杆(401)、上臂肘连接杆(402)、小臂肘连接杆(403)、半圆环小臂连接杆(404),所述半圆环上臂连接杆(401)与所述上臂肘连接杆(402)固定连接,所述小臂肘连接杆(403)与所述上臂肘连接杆(402)活动连接,所述半圆环小臂连接杆(404)与所述小臂肘连接杆(403)固定连接。
13.进一步的,所述小臂肘连接杆(403)与所述上臂肘连接杆(402)的相对转动,实现
肘关节的屈伸运动。
14.所述腕关节外骨骼机构包括半球壳体下支架(501)、半球壳体(502)、半球壳体上支架(503)、连接架1(504)、固定块1(505)、弹簧(506)、固定块2(507)、连接架2(508)、柔性绳(511)、连接架3(509)、固定块3(510)、固定块4(512)、连接架4(513)、半壳球体固定环(514)、前臂转动电机(515)、电机架(516)、l型连杆1(517)、l型连杆2(518)、z型连杆1(519)、z型连杆2(520),所述半球壳体下支架(501)与所示半球壳体(502)连接,所述半球壳体(502)与所述半球壳体上支架(503)连接,所述半球壳体上支架(503)与所述半壳球体固定环(514)固定连接,所述固定块1(505)与所述连接架1(504)活动连接,所述连接架1(504)与所述半球壳体(502)固定连接,所述固定块2(507)与所述连接架2(508)活动连接,所述连接架2(508)与所述半球壳体固定环(514)固定连接,所述弹簧(506)与所述固定块1(505)和所述固定块2(507)固定连接,所述固定块3(510)与所述连接架3(509)活动连接,所述连接架3(504)与所述半球壳体固定环(514)固定连接,所述固定块4(512)与所述连接架4(513)活动连接,所述连接架4(513)与所述半球壳体(502)固定连接,所述柔性绳(511)与所述固定块3(510)和固定块4(512)固定连接,所述前臂旋转电机(515)与所述半壳球体固定环(514)固定连接,所述电机架(516)与所述前臂旋转电机(515)固定连接,所述l型连杆1(517)和所述l型连杆2(518)与所述电机架(516)固定连接,所述l型连杆1(517)和l型连杆2(518)分别通过z型连杆1(519)和z型连杆2(520)与小臂肘连接杆(403)固定连接。
15.进一步的,所述柔性绳(511)、固定块1(505)、固定块2(507)为一组柔性驱动模块,所述弹簧(506)、固定块3(510)、固定块4(512)为另一组柔性驱动模块。
16.进一步的,所述柔性驱动模块以半球壳体(502)球心为轴心呈120
°
圆形阵列呈三组柔性驱动模块,共有6个固定块,2根柔性绳,一根弹簧,柔性绳(511)通过一端与固定块1(505)连接,另一端通过固定块2(507)与电机1(202)连接,弹簧的加入一方面使腕关节并联机构增加了柔性,可防止患者在进行康复运动时患肢受到二次损伤,另一方面该并联机构可以由两根柔性绳就可以完成腕关节的桡/尺屈以及掌/背屈运动。
17.进一步的,所述半球壳体(502)满足人手掌宽度的尺寸,通过半球壳体上支架(503)与半球壳体下支架(501)将半球壳体(502)约束在腕部掌背屈及桡尺屈机构上,使机构可满足腕关节的掌背屈及桡尺屈运动。
18.进一步的,所述前臂旋转电机(515)驱动半球壳体固定环(514),带动半球壳体(502)转动,是向前臂的旋前/旋后运动;所述电机1(202)和电机2(206)分别驱动两条柔性绳,实现腕关节桡尺屈及掌背屈运动。
19.与现有技术相比,本发明的有益效果是:本发明以人体关节的肌肉和骨骼特点设计了肩、肘、腕七自由度形式,避免了康复过程中自由度缺失的问题,解决了肩关节在进行内收外展运动时可以更加直接有效的进行以及腕关节在执行腕关节的桡尺屈运动时不能很好的贴合人体腕关节的转动中心的问题,同时加入柔性绳驱动,刚柔耦合的特点降低了患者在康复过程中受到二次伤害的风险,整体结构更加边界,增加康复治疗的舒适度和康复效率。
20.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
21.为了更清楚地说明本发明实施例技术中的技术方案,下面将对实施例技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
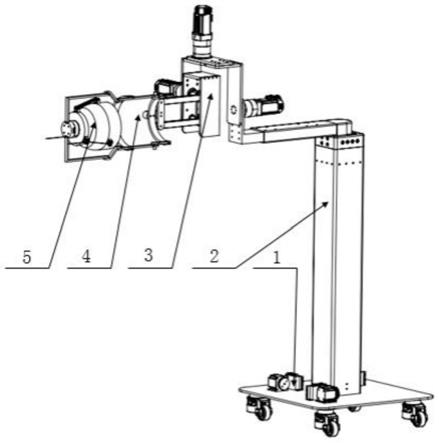
22.图1是一种七自由度串并联式上肢外骨骼康复机器人的总体结构示意图;图2是一种七自由度串并联式上肢外骨骼康复机器人中驱动机构示意图;图3是一种七自由度串并联式上肢外骨骼康复机器人中肩关节机构示意图;图4是一种七自由度串并联式上肢外骨骼康复机器人中肩关节机构另一视角示意图;图5是一种七自由度串并联式上肢外骨骼康复机器人中肘关节机构示意图;图6是一种七自由度串并联式上肢外骨骼康复机器人中腕关节机构示意图;图7是一种七自由度串并联式上肢外骨骼康复机器人中腕关节机构另一视角示意图。
具体实施方式
23.结合图1,一种七自由度串并联式上肢外骨骼康复机器人,包括驱动机构(1)、基座(2)、肩关节外骨骼机构(3)、肘关节外骨骼机构(4)、腕关节外骨骼机构(5);所述驱动机构(1)与基座底板相连,所述肩关节外骨骼机构(3)与基座(2)中前连接件连接,所述肘关节外骨骼机构(4)中半圆环上臂连接杆(401)与上臂短连接件连接(324),所述腕关节外骨骼机构(5)与小臂后部连接,所述腕关节外骨骼机构(5)中手握持把手与人体手部相连。
24.结合图2,驱动机构(1)包括底板(201)、电机1(202)、电机支架1(203)、缠绳盘1(204)、控制器1(205)、电机2(206)、电机支架2(207)、缠绳盘2(208)、控制器2(209)、所述电机1(202)与所述电机支架1(203)固定连接,所述电机支架1(203)与所述底板(201)连接,所述缠绳盘1(204)与所述电机1(202)固定连接,所述控制器1(205)与所述底板(201)固定连接,所述电机2(206)与所述电机支架2(207)固定连接,所述电机支架2(207)与所述底板(201)固定连接,所述缠绳盘2(208)与所述电机2(206)固定连接,所述控制器2(209)与所述底板(201)固定连接。
25.结合图3、图4,肩关节外骨骼机构包括减速器1(301)、电机3(302)、竖直短板(303)、l型连接板1(304)、横连接板(305)、电机4(306)、减速器2(307)、l型连接板2(308)、外壳体(309)、电机5(310)、减速器3(311)、联轴器(313)、水平轴1(314)、带轮1(315)、皮带(316)、平行连杆1(317)、轴承1(318)、轴承2(312)、水平轴2(319)、带轮2(320)、轴承3(321)、平行连杆2(322)、竖直连杆(323)、短连接杆(324),,所述电机3(302)与所述减速器1(301)连接,所述减速器1(301)输出端与所述竖直短板(303)连接,所述竖直短板(303)与所述l型连接板1(304)连接,所述l型连接板1(304)和所述l型连接板2(308)与所述横连接板(305)连接,所述电机4(306)和所述减速器2(307)连接,所述减速器2(307)输出端与所述横连接板(305)连接,所述外壳体(309)与所述l型连接板2(308)相连,所述电机5(310)与所述减速器3(311)连接,所述减速器3(311)与所述外壳体(309)连接,所述联轴器(313)与所述减速器3(311)输出轴和所述水平轴1(314)连接,所述带轮1(315)与所述水平轴1(314)连
接,所述平行连杆1(317)与所述水平轴1(314)连接,所述水平轴1(314)与所述轴承1(318)连接,所述轴承1(318)与所述外壳体(309)连接,所述轴承2(312)和轴承3(321)与所述外壳体(309)连接,所述水平轴2(319)与所述轴承2(312)和所述轴承3(321)连接,所述水平轴2(319)与所述带轮2(320)和所述平行连杆2(322)连接,所述皮带(316)与所述带轮1(315)和所述带轮2(320)连接,所述竖直连杆(323)与所述水平连杆1(317)和水平连杆2(322)连接,所述短连接杆(324)与所述竖直连杆(323)连接。
26.结合图5,肘关节外骨骼机构包括半圆环上臂连接杆(401)、上臂肘连接杆(402)、小臂肘连接杆(403)、半圆环小臂连接杆(404),所述半圆环上臂连接杆(401)与所述上臂肘连接杆(402)连接,所述小臂肘连接杆(403)与所述上臂肘连接杆(402)连接,所述半圆环小臂连接杆(404)与所述小臂肘连接杆(403)连接。
27.结合图6、图7,腕关节外骨骼机构包括半球壳体下支架(501)、半球壳体(502)、半球壳体上支架(503)、连接架1(504)、固定块1(505)、弹簧(506)、固定块2(507)、连接架2(508)、柔性绳(511)、连接架3(509)、固定块3(510)、固定块4(512)、连接架4(513)、半壳球体固定环(514)、前臂转动电机(515)、电机架(516)、l型连杆1(517)、l型连杆2(518)、z型连杆1(519)、z型连杆2(520),所述半球壳体下支架(501)与所示半球壳体(502)连接,所述半球壳体(502)与所述半球壳体上支架(503)连接,所述半球壳体上支架(503)与所述半壳球体固定环(514)连接,所述固定块1(505)与所述连接架1(504)连接,所述连接架1(504)与所述半球壳体(502)连接,所述固定块2(507)与所述连接架2(508)连接,所述连接架2(508)与所述半球壳体固定环(514)连接,所述弹簧(506)与所述固定块1(505)和所述固定块2(507)连接,所述固定块3(510)与所述连接架3(509)连接,所述连接架3(504)与所述半球壳体固定环(514)连接,所述固定块4(512)与所述连接架4(513)连接,所述连接架4(513)与所述半球壳体(502)连接,所述柔性绳(511)与所述固定块3(510)和固定块4(512)连接,所述前臂旋转电机(515)与所述半壳球体固定环(514)连接,所述电机架(516)与所述前臂旋转电机(515)连接,所述l型连杆1(517)和所述l型连杆2(518)与所述电机架(516)连接,所述l型连杆1(517)和l型连杆2(518)分别通过z型连杆1(519)和z型连杆2(520)与小臂肘连接杆(403)连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1