一种脑外科手术用手部稳定器的制作方法
1.本发明涉及手术辅助用具技术领域,具体为一种脑外科手术用手部稳定器。
背景技术:
2.脑外科一般指的是神经外科,是利用神经外科学,并以检查为主,手术为径的综合治疗和全面评估的学科。医学中最年轻、最复杂而又发展最快的一门学科。以前由于技术的限制,人的脑部手术可以说是一个禁区,然而随着科技的发展,已经可以借助先进的显微外科设备开展各种显微神经外科手术。由于脑外科手术的精细和复杂程度,对于主刀医生来说,在手术过程中小臂长时间的悬空手术,易疲劳发酸和抖动,影响手术的稳定性,即手部的稳定非常重要。鉴于此,我们提出一种脑外科手术用手部稳定器。
技术实现要素:
3.本发明的目的在于提供一种脑外科手术用手部稳定器,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种脑外科手术用手部稳定器,包括活动管,所述活动管的一端连接有可沿其长度方向滑动的小臂套,所述活动管靠近的另一端处转动连接有稳定杆,所述稳定杆上设置有大臂套,所述活动管另一端铰接有稳定装置;
6.所述稳定装置包括盛油筒、活动轴、压块、通油管以及筒盖,所述盛油筒底端开口,顶端与稳定杆转动连接,所述活动轴插设在盛油筒内,所述压块设置在活动轴上,所述盛油管上对称地设有两个连通内部的通油管,所述筒盖卡接在盛油筒底端开口内,所述压块与盛油筒的内壁滑动连接,所述盛油筒的两端均对称地设有出油嘴,所述出油嘴与盛油筒内部相连通,所述通油管的两端均与出油嘴对应连接。
7.作为本发明的优选,所述盛油筒的顶端设有固定环,所述稳定杆上设有联动环,所述固定环与所述联动环通过销钉转动连接,所述活动轴的底端套接有轴套,所述轴套的两端均套接有双环片,所述双环片的另一个圆环与活动管转动连接。
8.作为本发明的优选,所述筒盖的中心孔内粘接有橡胶圈且橡胶圈与所述活动轴插接并滑动连接。
9.作为本发明的优选,所述活动管上设置有连接环,所述稳定杆的底端对称地设有两个铰接环,且其中一个铰接环内侧设有内螺纹,所述铰接环与连接环通过预紧螺栓转动连接。
10.作为本发明的优选,所述小臂套呈开口朝上的半圆环结构,底部与活动管相连接,且顶部两端面开设有插槽,所述小臂套的上方设置有呈开口朝下的半圆环结构的套盖,所述套盖的底部两端面设有与插槽插接的插条。
11.作为本发明的优选,所述小臂套的底部设有拉伸管,所述拉伸管与活动管插接,所述拉伸管的内部设置有调位机构;
12.所述调位机构包括拉杆、锁块和复位弹簧,所述拉杆插设在拉伸管内,所述锁块和复位弹簧设置在拉杆上,所述锁块的顶部通过压簧与拉杆内壁连接,所述锁块的底端设有斜角面,所述活动管的内壁底部沿轴向开设有若干卡槽,所述锁块贯穿拉杆和拉伸管,并与卡槽卡接。
13.作为本发明的优选,所述卡槽的结构与所述锁块的底部结构相吻合,所述锁块的上半段开设有通槽,所述拉杆上设有与通槽插接的导滑面。
14.作为本发明的优选,所述导滑面的端部连接有挡块,所述复位弹簧与挡块相连接,所述拉杆的远离挡块的一端设有尺寸缩小的按钮。
15.作为本发明的优选,所述大臂套呈开口环结构且其开口朝向小臂套方向,所述大臂套的顶部外侧设有与稳定杆套接的套台,所述大臂套开口端的一侧粘接有弹力带,所述弹力带上开设有若干套孔,所述大臂套开口端的另一侧设有若干限位柱,所述大臂套的内侧粘接有护垫。
16.与现有技术相比,本发明的有益效果是:
17.1、本发明通过设置的撑于小臂底部的活动管,活动管的前端连接有可沿其长度方向滑动的小臂套,活动管靠近其后端处转动连接有稳定杆,稳定杆的顶端设置有用于夹住大臂的大臂套,从而利用小臂套套住小臂,大臂套夹住大臂,并在活动管和稳定杆的共同活动支撑作用下,保证小臂被机械的支托着,利于其悬空稳定手术,具有实用价值。
18.2、本发明通过在活动管和稳定杆之间设置的稳定装置,利用盛油筒内的液压油粘性和出油嘴的小孔通流阻力,而形成阻尼效果,使得小臂带动活动管活动时,借助其阻尼力而稳定悬空,且利于消除其抖动,进一步保证医生手臂稳定的手术,具有实用价值。
19.3、本发明通过在小臂套顶部设置的拉伸管而与活动管滑动连接,而利于不同臂长的医生获得舒适的小臂支撑点,且拉伸管内设置了调位机构,其自然状态下,小臂套可直接施力移向大臂套,而调节支撑点,此外通过按压拉杆解除锁块与活动管卡槽的锁定状态,而利于拉动小臂套前移,保证小臂与大臂之间获得合适的支撑距离,其设计巧妙,且操作简便,具有人性化功能。
20.4、本发明通过在小臂套上方设置的快插式套盖,利于医生小臂快速固定,并在大臂套开口外侧设置的弹力带,利于根据医生大臂粗细进行有效快速的绑紧,使得医生在固定大小臂时稳定且简单实用,而不占用手术时间。
附图说明
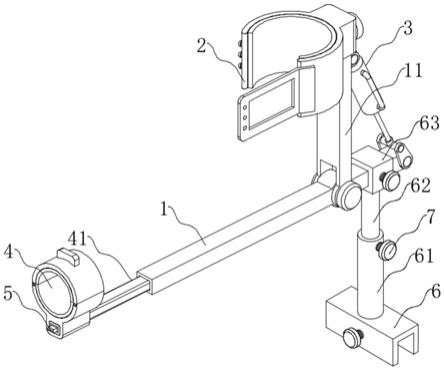
21.图1为本发明的整体装配结构示意图之一;
22.图2为本发明的整体装配结构示意图之二;
23.图3为本发明的整体装配结构示意图之三;
24.图4为本发明的稳定装置装配结构示意图;
25.图5为本发明的稳定装置拆分图;
26.图6为本发明的大臂套局部拆分图;
27.图7为本发明的小臂套局部拆分图;
28.图8为本发明的调位机构装配结构示意图;
29.图9为本发明的图8中a处放大结构示意图;
30.图10为本发明的活动管内部结构示意图;
31.图11为本发明的活动管剖视图;
32.图12为本发明的整体装配结构示意图之四。
33.图中各个标号的意义为:
34.1、活动管;10、连接环;11、稳定杆;111、铰接环;112、联动环;12、预紧螺栓;13、卡槽;
35.2、大臂套;20、套台;21、限位柱;22、弹力带;23、套孔;24、护垫;
36.3、稳定装置;31、盛油筒;311、出油嘴;312、固定环;32、通油管;33、活动轴;331、压块;332、筒盖;34、轴套;35、双环片;
37.4、小臂套;40、插槽;41、拉伸管;42、套盖;421、插条;43、胶套;
38.5、调位机构;50、拉杆;501、按钮;502、导滑面;51、锁块;510、通槽;511、斜角面;52、压簧;53、挡块;54、复位弹簧;
39.6、床栏夹;61、套管;62、调节管;63、套框;7、固定螺栓。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
42.请参阅图1
‑
图12,本发明提供一种技术方案:
43.一种脑外科手术用手部稳定器,包括活动管1,用于置于小臂底部,活动管1的前端连接有可沿其长度方向滑动的小臂套4,活动管1靠近其后端处转动连接有稳定杆11,稳定杆11的顶端设置有用于夹住大臂的大臂套2,其主要利用小臂套4套住小臂,大臂套2夹住大臂,并在活动管1和稳定杆11的共同活动支撑作用下,保证小臂被机械的支托,利于其悬空稳定。
44.活动管1的后端铰接有稳定装置3,稳定装置3另一端与稳定杆11上半部转动连接,其进一步用于保证小臂与大臂之间的稳定。稳定装置3包括盛油筒31、活动轴33、压块331、通油管32以及筒盖332,盛油筒31底端开口,顶端与稳定杆11转动连接,活动轴33插设在盛油筒31内,压块331设置在活动轴上,盛油管31上对称地设有两个连通内部的通油管32,筒盖332卡接在盛油筒31底端开口内。通过事先向盛油筒31内注满粘性的液压油,然后利用筒盖332封堵密封,当小臂上下动弹后,而带动活动管1以稳定杆11底端为转轴而前后端翘起,由于稳定杆11通过大臂套2夹在大臂上,即大臂的不动,可保证稳定杆11稳定,活动管1的后端翘起势必带动活动轴33沿盛油筒31轴向运动,进而其顶端的压块331会将盛油筒31内的液压油或上推或下推,经通油管32流动,则利用液压油的粘性,而形成阻尼效果,使得小臂
活动稳定,利于消除其抖动,保证医生手臂稳定的手术。
45.压块331的外侧紧密套设有橡胶圈且橡胶圈与盛油筒31的内壁套接配合,以此形成密封效果。盛油筒31的上下端均对称地设有出油嘴311,出油嘴311与盛油筒31内部相连通,通油管32的两端分别与两个出油嘴311对应连接,由于压块331将盛油筒31内部空间分成上下两半,从而盛油筒31内部液压油只有通过通油管32在其上下端内相互流通,利用出油嘴311的小孔径(相对于盛油筒31的内径数倍缩小)对液压油降速流通而形成阻尼效果,用于阻碍小臂大幅度运动和抖动。盛油筒31的顶端与稳定杆11上半部转动连接,活动轴33的底端与活动管1的后端转动连接,保证了活动管1翘起时,稳定装置3能随之伸展和压缩长度,利于整个结构活动流畅。
46.活动管1、稳定杆11和大臂套2均采用abs材质制成,其坚韧且强度刚硬,材料环保无异味,便于擦洗,经久耐用。此外盛油筒31、活动轴33和压块331均采用不锈钢材质制成,利用其高强度而不会变形,影响活动管1和稳定杆11的转动。
47.盛油筒31的顶端焊接有固定环312,稳定杆11的上半部侧面且朝向活动管1的后端处焊接有联动环112,固定环312与联动环112通过销钉转动连接,活动轴33的底端紧密套接有轴套34,轴套34的横向两端套接有双环片35,双环片35的另一个圆环与活动管1的后端圆孔通过销钉转动连接,上述结构使得稳定装置3与稳定杆11和活动管1连接可转动,保证了整体的联动性和自由活动性,利于小臂和大臂之间的随意摆动,保证了医生手臂自由活动的进行手术。
48.进一步的,盛油筒31和活动轴33的长度相等,此为优选尺寸,保证了活动轴33有足够长的伸缩长度,利于小臂大范围的摆动,保证医生手术顺利进行。筒盖332的中心孔内粘接有橡胶圈且橡胶圈与活动轴33插接并滑动连接,利用橡胶圈的密封性,避免盛油筒31内的液压油渗漏。
49.具体的,活动管1靠近其后端处设置有连接环10,稳定杆11的底端对称地设有铰接环111,铰接环111和连接环10内插接有预紧螺栓12,其中一个铰接环111内侧设有内螺纹,预紧螺栓12与带有内螺纹的铰接环111螺纹连接,从而使得稳定杆11与活动管1之间稳定转动,且预紧螺栓12的端部设有圆环,此圆环的尺寸大于铰接环111的外径,形成限位结构,通过旋转预紧螺栓12,而使带有内螺纹的铰接环111或挤压连接环10,或远离连接环10,则形成压紧和松脱效果,使得稳定杆11和活动管1之间可固定可活动,保证医生在手术时,可以调节固定小臂与大臂的夹角,而获得稳定的手术姿势,避免小臂长时间悬空而发酸,利于长时间的手术。
50.除此之外,小臂套4呈开口朝上的半圆环结构,且顶部两端面均开设有插槽40,小臂套4的上方设置有呈开口朝下的半圆环结构的套盖42,套盖42与小臂套4的内径相等,通过套盖42和小臂套4快速罩住小臂,套盖42的底部两端面设有与插槽40插接的插条421,插槽40和插条421的横截面均呈水滴状结构,以此形成限位结构,避免套盖42与小臂套4在其径向上滑脱。小臂套4和套盖42的内侧均粘接有为硅胶材质的胶套43,其柔韧性好,增加了小臂和大臂夹紧的舒适度。套盖42的顶部设有凸起,便于手拨凸起而带动套盖42与小臂套4拆装。小臂套4的底部设有拉伸管41,拉伸管41沿活动管1轴向设置,且与活动管1的前端插接,拉伸管41的内部设置有调位机构5,用于调节小臂套4至大臂套2的水平间距,利于不同臂长的医生佩戴调整使用,使他们小臂获得最佳支撑点,而保证小臂的稳定。
51.调位机构5包括拉杆50、锁块51和复位弹簧54,拉杆50插设在拉伸管41内,且横截面尺寸与拉伸管41的内部横截面尺寸相匹配,保证拉杆50移动时不晃动。锁块51和复位弹簧54设置在拉杆51内,锁块51的顶部通过压簧52与拉杆51的内壁相连接,底部设有斜角面511,活动管1的内壁底部沿轴向开设有若干卡槽13,锁块51贯穿拉杆51和拉伸管41,并与卡槽13卡接。从而在自然状态下,锁块51在压簧52的弹压下能插入到卡槽13中,实现小臂套4的限位。根据上述结构,小臂套4是可按压向大臂套2方向移动,而便于卡紧小臂变粗处,再停下锁定,即利于医生佩戴时快速调节,当按压拉杆50则会带动锁块51上移而脱离卡槽13,便可前后移动小臂套4对小臂支撑点的调节。
52.本实施例中,小臂套4、拉伸管41、拉杆50、锁块51均采用abs材质制成,其坚韧且强度刚硬,材料环保无异味,经久耐用。
53.进一步的,卡槽13的结构与锁块51的底部结构相吻合,卡槽13的倾斜面朝向活动管1的后端,从而利于推压小臂套4水平移向大臂套2时,锁块51能在其斜角面511和卡槽13斜面滑动下而顺利脱离,并在压簧52的弹力作用下,卡入下一个卡槽13,由于锁块51朝向活动管1一侧面为竖直面,进而和卡槽13的竖直面形成阻挡之势,则阻碍小臂套4施压远离大臂套2,只有使用调位机构5才可解除小臂套4的前移。锁块51的上升距离大于活动管1的壁厚,避免锁块51的行程不够,而始终卡在卡槽13内。锁块51的上半段开设有通槽510,拉杆50上设有与通槽510插接的导滑面502,导滑面502的高度大于卡槽13的高度,即按压拉杆50时,导滑面502与通槽510滑动连接,利用导滑面502的高度而带动锁块51上移,实现其与卡槽13的脱离,并在复位弹簧54的回弹力作用下,复位拉杆50,且在压簧52的回弹力作用下,将锁块51推入下个位置的卡槽13中,实现小臂套4的前移锁定。
54.导滑面502的前端设有挡块53,以便支托着锁块51,复位弹簧54与挡块53相连接,复位弹簧54的另一端抵在拉伸管41的内端。拉杆50的外端设有按钮501,按钮501的外侧套设有呈方框结构的矩形块且矩形块与拉伸管41的外端口紧密卡接配合,以此形成对拉杆50的限位作用,避免其在复位弹簧54的回弹力作用下而弹出拉伸管41内。
55.具体地,大臂套2呈开口环结构且其开口朝向小臂套4方向,以便小臂和大臂的同向顺利卡入小臂套4和大臂套2内。大臂套2的顶部外侧设有与稳定杆11套接的套台20,套台20底端内为空腔结构,且套台20的外侧贯穿螺纹连接有螺栓,用于旋转压紧稳定杆11,保证大臂套2的稳定。大臂套2开口端的一侧粘接有弹力带22,弹力带22的外端处侧面开设有若干套孔23,大臂套2开口端的另一侧设有若干限位柱21,限位柱21的外端尺寸扩大,形成限位结构,而保证套孔23套入限位柱21后不滑脱,从而利于弹力带22的弹力使大臂套2夹紧大臂,大臂套2的内侧粘接有护垫24,其为硅胶材质,用于增加大臂被夹紧的舒适度。
56.具体地,大臂套2和小臂套4内圈壁部分可以采用弹性材料制作,医生在使用过程中可以让手臂进行适当的小范围活动,避免长时间保持同一姿势不动,而弹力能够帮助大臂套和小臂套在手术过程中对手臂进行固定。
57.本实施例中,活动管1的后端下方设置有用于夹住床栏的床栏夹6,床栏夹6的顶面中部竖向焊接有套管61,套管61的内部插接有调节管62,调节管62的长度大于套管61的长度,使得床栏夹6可调节支撑活动管1的高度,便于医生手臂的固定悬空,调节管62的顶端焊接有套框63,套框63与活动管1套接配合,且位于稳定杆11和稳定装置3之间,避免胳膊放置在活动管1前段时碰触磕痕,床栏夹6的竖边一侧、套管61顶部一侧和套框63竖边一侧均贯
穿并螺纹连接有固定螺栓7,使得床栏夹6整体高度稳定,从而稳定支撑着活动管1整体稳定,保证了胳膊悬空稳定的手术。
58.本发明的脑外科手术用手部稳定器在使用时,先将医生的小臂和大臂同时分别卡入小臂套4和大臂套2内,然后盖上套盖42,绑紧弹力带22,再根据自身小臂的长度而向大臂套2水平直接推压移动,直至调整到套紧小臂的位置即可,然后医生的小臂便获得稳定的支撑,医生在手术时,抬起和下放小臂时,则会经活动管1带动活动轴33做伸缩运动,进而通过压块331上推或下推盛油筒31内的液压油经出油嘴311和通油管32流动,利用液压油自身的粘性和出油嘴311小径通流阻力,形成对小臂运动的阻尼效果,保证医生小臂稳定悬空而手术,再将床栏夹6固定到床栏上,并旋紧所有固定螺栓7,使得活动管1支托医生胳膊稳定悬空,进而消除手抖的问题。
59.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1