一种半自动分离对接的床椅一体化机器人
:
1.本发明涉及保健护理器械技术领域,特别涉及一种床椅一体化机器人。
背景技术:
2.老龄化的现象越来越普遍,随着年龄的增长,老年人的生理机能逐渐下降,特别是行动能力的下降给老年人的生活带来了极大的不便。另外灾难和疾病造成的残障人士也在增加,他们存在不同程度的行动和自理能力丧失,传统护理床已经不能完全满足这些人日常生活的需要,目前市面上的一些护理床可以帮助患者在床上完成一些日常活动,但是对于一些室外的活动需求仍无法满足。
3.对于行动能力不便的患者,在进行日常护理或移动过程中,存在诸多不便。在医院及家庭的护理设施中,长期卧床的老人或残疾人(以下简称被护理人员)不仅需要抬背屈腿等动作来缓解长期平躺带来的不适,还需将被护理者通过如轮椅等设施转移至其它场所,进行其他活动,例如娱乐交流、外出活动等,这就需要至少一名护理人员将其抱起转移至轮椅。对于护理人员来说不仅操作不便,同时也增加了被护理者的意外风险。cn102499828b公开一种侧面分离的床椅一体化机器人,属于保健护理器械领域,包括可移动的床椅转换机构、控制系统以及固定在地面上的床体。床椅转换机构可由床体中移出或移入,通过控制系统实现侧面分离的床椅一体化机器人的控制。具备较为完善床、椅间转换功能,以及翻身功能;且通过控制系统可实现全自动床椅转换以及床椅转换机构与床体间的自动对接。但是需要操作难度较大,对一些残障人士有一定的门槛。cn109966077a公开了一种床椅一体化机器人,包括:床体部和轮椅部;床状态时轮椅部与床体部对接构成一护理床;轮椅状态时,轮椅部与床体部分离使轮椅部构成轮椅;此发明提供的半自动的床椅体化机器人,只需一名护理人员即可实现被护理者由床向轮椅的转移,且在对接成床状态时,能够实现抬背屈腿等常规护理床的功能,在保证安全性的同时,提高舒适性,且结构简单。但稳定性较差,无法满足使用者需求。cn209019207u公开了一种实用新型涉及自动化设备领域,尤其是一种床椅两用服务机器人,包括一侧开放设置的床体框架,一与床体框架活动相卡设的轮椅,所述轮椅包括-水平设置的底座,在底座底部设有行走轮,在底座上设有椅座,椅座的一侧与一椅背架相铰接,椅座的另一侧与一侧腿部架相铰接,腿部架的另一侧与一脚踏架相铰接,所述椅座、椅背架、腿部架、脚踏架之间通过四连杆机构相联动。本实用新型结构设计合理,当床体需要变换轮椅形态时,部分床体可以由电机控制下降至一定高度方便轮椅部分旋转分离,轮椅下部的推杆电机带动旋转轴旋转,实现轮椅的自动旋转定位,保证轮椅与床体的稳定性及安全性,同时分离装置进行床椅分离,轮椅单独运作。在轮椅与床体对接过程中,旋转电机再次推动轮椅部分进行旋转同时床体下降配合完成相应指令。通过各装置的相互配合,可以在有限空间范围内完成床椅转换的动作,节省使用空间。但是结构的可实现性,还需进一步改善。当轮椅需要与床体进行入位对接时旋转电机带动齿轮旋转,实现轮椅的自动旋转定位,保证轮椅与床体的稳定性及安全性,在轮椅与床体对接后,能够控制扶手自动下降至
床体平面以下,当轮椅从床体中脱离后,扶手能够再次上升,有效增加了组合后床体的使用空间。但结构过于简单,还需要进一步改善。
4.传统的护理床,在移动病人时需要将病人搬至轮椅,或整张护理床直接移动。这使得在搬至轮椅时,一方面容易对患者造成一定的不适,另一方面增加了医护人员的负担。
5.因此,用户急需一种多功能床椅一体化机器人以更好地降低护理者的劳动强度,满足使用者的需求,提升生活质量。
技术实现要素:
6.为了解决现有技术造成的护理效果不足的问题,本发明提供了一种可旋转分离的床椅一体化机器人,操作简便舒适。
7.所述床椅一体化机器人包括:床体部和轮椅部;床状态时,所述轮椅部与所述床体部对接构成一护理床;轮椅状态时,所述轮椅部与所述床体部分离使所述轮椅部构成一轮椅。
8.所述床体部包括床头板、床尾板、床垫、床架、床板、床体控制箱、升降电动推杆、升降电动推杆固定板、脚轮、吸板,升降电动推杆随着升降电动推杆固定板固定于所述床架上;所述床体控制箱也固定在所述床架上,床架两边分别设置一个升降电动推杆,升降电动推杆提供动力,控制整体的床架升降;所述床体控制箱控制所述升降电动推杆的伸缩、从而控制整个床体的运动。
9.所述轮椅部包括椅背电动推杆、屈腿电动推杆、旋转电动推杆、起背板、臀板、臀板固定板、大腿板、小腿板、脚踏板、轮椅控制箱、万向轮、后轮、脚踏连杆、屈腿连杆、第一椅部架、第二椅部架、手把、滑块、滑块连杆、滑柱、小滑轮;臀板固定于所述臀板固定板上;所述臀板依次与起背板、臀部固定板、大腿板、小腿板、脚踏板以螺纹形式连接;所述轮椅板可转动一定角度,形成各种姿态;所述臀部固定板与第一椅部架固定连接;所述起背板通过起背推杆与所述椅子连接,实现床状态或轮椅状态下的起背功能。
10.所述轮椅部分为上、中、下三层,上层包括起背板、臀板、大腿板、小腿板、脚踏板、椅背电动推杆、屈腿电动推杆、轮椅控制箱、第一椅架。中层包括旋转轴、旋转电动推杆、第二椅架、齿轮、齿条,下层包括两个万向轮、两个后轮。旋转装置包括旋转轴、齿轮、齿条、旋转电动推杆、轴承。所述屈腿电动推杆与所述滑块连杆、屈腿连杆连接,圆轴与屈腿连杆保持连接,通过所述抬腿推杆进行所述轮椅部轮椅状态或床状态的转换;在转换为轮椅状态的过程中,所述大腿板下面的滑柱里的滑块由滑块连杆带动进行滑动,带动所述屈腿连杆将所述小腿板能够抬起一定角度和弯曲一定角度;轮椅状态时,所述臀板、大腿板、所述小腿板、所述脚踏板以螺纹连接方式形成联动;
11.在对接为床状态时,护理人员需要调节脚踏连杆的卡扣位置,使得脚踏板保持平行状态,起背板、臀板、大腿板、小腿板、脚踏板也均保持水平状态。
12.在床状态时,椅部上层旋转90度,与床部合体为一个整体的床。
13.在床状态时,椅部的电磁吸附装置断电,与床部的吸板进行结合,所述臀板、大腿板、小腿板、脚踏板均保持水平。
14.在一些别的公开发明的专利中,所述床体部还包括床头凳、床尾凳及床头板,所述床头板分别与所述床架、所述床头凳及所述床尾凳连接;所述床头凳及所述床尾凳分别设
置于床头和床尾,并分别与所述床架可拆卸地连接;所述床头凳及所述床尾凳下方分别设有可调节高度的脚杯,所述脚杯根据所述床架高度调节所述床头凳及所述床尾凳的高度;所述床架下方有四个脚轮。
15.在一些公开发明的专利中,所述底盘上连接有升降管,所述升降管上设置有间断式的定位孔,所述升降架与所述升降管连接,通过所述升降管上的定位孔调节所述升降架与所述底盘的高度;所述底盘下方设有四个脚轮。
16.在一些公开发明的专利中,所述轮椅部还设置有升降扶手,所述升降扶手包括外管、内管、扶手及旋钮,所述外管与所述升降架连接,所述内管上开设若干间断式的定位孔,所述旋钮与所述定位孔配合,通过所述旋钮调节所述扶手高度。
17.另一方面,本发明还提供一种床椅一体化机器人的合体方法,包括以下步骤:
18.步骤1:判断所述床体部的高度,若高度相同,执行步骤3,否则执行步骤2;
19.步骤2:调节所述轮椅部的升降架与所述底盘的高度,返回步骤1;
20.步骤3:护理人员推动所述轮椅部,使所述轮椅架上的电磁铁与所述床体部上的吸板对接,使得床部和椅部形成一个完整的床。
21.在步骤2之前还包括以下步骤:控制轮椅部中升降扶手上的旋钮,使所述升降扶手降下。在一些实施例中,
22.再一方面,本发明还提供一种床椅一体化机器人的分离方法,包括以下步骤:
23.步骤1:所述椅部的轮子由电机控制,可以推着椅子向侧向移动;
24.步骤2:所述轮椅控制箱控制所述起背推杆以及所述抬腿推杆,使第一起背板、所述大腿板、所述小腿板及所述第一脚踏板联动弯曲,所述轮椅部形成轮椅状态。
25.在别人的实施例中,步骤1中,通过将所述轮椅部从所述床体部中水平拉出,来使所述轮椅板上的对接口与所述床体部上的对接板分离
26.在一些实施例中,在步骤2之前还包括以下步骤:将所述轮椅部的升降扶手拔出并通过所述升降扶手的旋钮进行扶手的定位。
27.本发明的技术效果:具有良好的护理功能,从以上所述可以看出,本发明提供的一种可分离式一体化多功能护理床椅与现有技术相比的有益效果为:
28.其一:操作简便性。在现有的一些护理床上,自动化程度较低,很多情况都需要护理人员的帮助,当病人需要坐姿转身进行日常交谈等活动时,护理人员需要先将床椅分离,再对轮椅位置进行调整,费时且费力。而在本发明中,轮椅部可以在与床体相贴合的状态条件下,床体部下降,轮椅部由遥控器操作自动进行旋转,从而实现病人的自主需求,极大的方便了被护理者的日常活动也简化了护理人员的工作,且在有限的空间内提升了装置的功能性。
29.其二:操作安全性。在现有的一些护理床上,由于护理床结构的设置,在使用时,病人的安全很难得到保证,具体表现为,当病人需要做一些其他事情时,例如外出活动时,需要护理人员将护理人员从护理床转移至轮椅上,在这个移动的过程中可能会发生一定的危险,在本发明中,床体部和轮椅部既可以合并成一个整体,也可以拆开使用,遥控器的设置方便了病人也方便了护理人员。
29.其三:多功能性。在本发明中,此装置不仅可以用来睡觉休息,同时也可以使病人在一定条件下完成饮食和休闲娱乐,如果病人想外出放松,本发明仍然可以在一个护理人
员的帮助下完成。这些都体现了本护理床的多功能性。
30.本发明提供的半自动的床椅一体化机器人,只需一名护理人员即可实现被护理者由床向轮椅的转移,且在对接成床状态时,能够实现抬背屈腿等常规护理床的功能,在保证安全性的同时,提高舒适性,且结构简单。
31.同时,在由床状态向轮椅状态转换的过程中,所述第二腿部连杆将所述大腿板抬起一定角度,从而有利于防止起背过程中被护理人臀部的前移,提高了舒适性,可以有效锻炼被护理人员的腰部和腿部。
附图说明
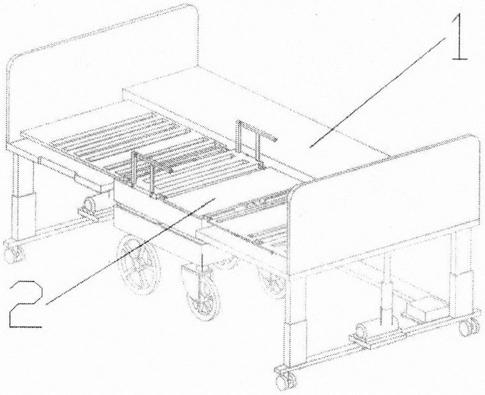
32.图1为根据本发明一个实施例床椅一体化机器人的合体状态时的整体结构示意图;
33.图2为根据本发明一个实施例床椅一体化机器人中床体部的结构示意图;
34.图3为根据本发明一个实施例床椅一体化机器人中轮椅部平放状态的结构示意图;
35.图4为根据本发明一个实施例床椅一体化机器人中轮椅部轮椅状态时的侧面结构示意图;
36.图5为根据本发明再一个实施例床椅一体化机器人中轮椅部的第二腿部连杆的机构示意图;
37.图6为根据本发明再一个实施例床椅一体化机器人中轮椅部旋转内部示意图;
38.其中,床体部1,轮椅部2,床体部1包括床头板11、床板12、床垫13、床尾板14、床体控制箱15、升降电动推杆固定板16、脚轮17、吸板18、升降电动推杆19、床架110。轮椅部包括起背板21、扶手22、臀板23、大腿板24、小腿板25、脚踏板26、脚踏连杆27、万向轮28、后轮29、扶手旋钮210、起背板手把211、椅背电动推杆212、电磁锁装置213、小滑轮214、第一椅部架215、第二椅部架216、滑块217、滑柱218、椅部控制箱219、屈腿连杆220、间断孔221、屈腿电动推杆222、齿轮223、旋转轴224、旋转电动推杆225、臀板固定板226、齿条227。
具体实施方式
39.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
40.参考图1所示,是本发明提供的一种可旋转分离的床椅一体化机器人一个实施例的结构示意图。
41.本发明床椅一体化机器人包括:床体部1和轮椅部2。床状态时(合体状态时),轮椅部2与床体部1对接构成一护理床;轮椅部2为轮椅状态时,轮椅部2与床体部1分离,轮椅部2构成一轮椅。
42.床体部1包括床头板11、床板12、床垫13、床尾板14、床体控制箱15、升降电动推杆固定板16、脚轮17、吸板18、升降电动推杆19、床架110。
43.床架11下方有四个脚轮17,方便移动,升降电动推杆19控制床架110升高和降低,床体控制箱15控制着床体12的运动,电磁锁装置213与吸板18连接和断开。
44.在本发明的一个实施例中,床体控制箱15内部包含控制板卡、电池、转接口等,通过螺钉固定于床架11上。
45.轮椅部2包括起背板21、扶手22、臀板23、大腿板24、小腿板25、脚踏板26、脚踏连杆27、万向轮28、后轮29、扶手旋钮210、手把211、椅背电动推杆212、电磁锁装置213、小滑轮214、第一椅部架215、第二椅部架216、滑块217、滑柱218、椅部控制箱219、屈腿连杆220、间断孔221、屈腿电动推杆222、齿轮223、旋转轴224、旋转电动推杆225、臀板固定板226、齿条227。第一椅部架215设置于臀板固定板226下方,轮椅板整体包括依次铰接在一起的起背板21、臀板23、大腿板24、小腿板25、脚踏板26,轮椅板和第一椅架可转动一定角度,形成各种姿态。椅背电动推杆219和屈腿电动连杆220控制着轮椅部2实现床状态或轮椅状态下的起背功能和屈腿功能。
46.本发明一个实施例中,轮椅控制箱219内包含控制板卡、电池、转接口等,通过螺钉固定于床架11上,在轮椅部2与床体部1分离后,床体由第一电动推杆控制,下降一定的高度,轮椅部椅背电动推杆212、屈腿电动推杆222的伸缩,使轮椅部2转换为轮椅状态,在合体成为床状态时,电磁铁装置将床体部1和轮椅部2牢牢吸住,保证不脱离。
47.屈腿连杆220与小腿板25连接,通过椅背电动推杆212和屈腿电动推杆222进行轮椅部2轮椅状态或床状态的转换。在轮椅状态时,屈腿连杆220与小腿板25、椅背电动推杆212和椅背板22搭接,形成联动。在由床状态向轮椅状态转换的过程中,屈腿连杆220将小腿板25抬起一定角度,从而有利于防止起背过程中被护理人臀部的前移,提高了舒适性。具体地,屈腿电动推杆222连接着滑块连杆2171,滑块连杆2171连接着滑块217。滑块217内部空心,可以在滑柱218上自由滑动,屈腿电动推杆222的伸缩带动滑块217和屈腿连杆220的运动,屈腿电动推杆222伸长,滑块217向前移动,小腿板25向上缓缓抬起,抬起一定角度后滑块217达到最大行程,大腿板24向上抬起。屈腿电动推杆222缩短,滑块217向后移动,大腿板24向下移动,小腿板25慢慢弯曲成一定的角度。屈腿电动推杆222与屈腿连杆220和滑块连杆2171均以螺纹方式连接,同时椅背电动推杆212使得起背板21向前弯曲,在床状态时,椅背电动推杆212收缩使得起背板21保持水平状态,臀板23、小腿板25、大腿板24、脚踏板26均保持水平状态。如图3示。
48.在本发明的一个实施例中,为方便脚踏板能转动不同的角度,在小腿板25上设置了间距相同的定位孔221,连接在脚踏板26上的脚踏连杆27的另一端设置了圆凸起,脚踏连杆一端设置在脚踏板的侧边,一端设置地圆凸起用来与小腿板上的定位孔221进行配合,这样使得脚踏板26可以形成不同的角度,参考图4,为根据本发明一个实施例床椅一体化机器人中轮椅部2轮椅状态时的侧面结构示意图。
49.请参阅图6和图5,根据本发明再一个实施例床椅一体化机器人中轮椅部2的旋转操作示意图。本实施例中,旋转电动推杆225在第二椅架216上,旋转电动推杆225与齿条227连接,齿轮223和旋转轴224焊接在一起,齿条227和齿轮223相啮合,旋转电动推杆225带动齿条227运动,齿条227带动齿轮223运动,齿轮223和旋转轴224是一体的,从而带动旋转轴224移动,使得轮椅部上半部分可以旋转。
50.本发明提供的半自动的床椅一体化机器人,只需一名护理人员即可实现被护理者由床向轮椅的转移,且在对接成床状态时,能够实现抬背屈腿等常规护理床的功能,在保证安全性的同时,提高舒适性,且结构简单,操作方便。
51.同时,在由床状态向轮椅状态转换的过程中,所述屈腿连杆220将所述小腿板25抬起一定角度,从而有利于防止起背过程中被护理人臀部的前移,提高了舒适性。
52.此外,针对上述床椅一体化机器人,本发明还提供一种床椅一体化机器人的合体方法,包括以下步骤:
53.步骤1:判断床体部1的高度,若床板和臀板高度相同,则执行步骤3,否则执行步骤2。
54.步骤2:调节床体部1的高度与臀板的高度,返回步骤1。
55.步骤3:推动轮椅部2,使轮椅板2上的电磁吸与床体部上的电磁吸对接,所述轮椅板上的大腿板、小腿板、脚踏板与臀板先旋转后变为床。
56.再一方面,本发明还提供一种床椅一体化机器人的分离方法,包括以下步骤:
57.步骤1:将所述轮椅板上的电磁铁对接口213与所述床体部上的吸板18对接口分离,所述臀板23与所述大腿板24、小腿板25、脚踏板26搭接,形成联动;
58.步骤2:所述轮椅控制箱219控制所述椅背电动推杆212以及所述屈腿电动推杆,使臀板、起背板、所述大腿板、所述小腿板及所述脚踏板联动弯曲,所述轮椅部形成轮椅状态。
59.一些实施例中,步骤1中,通过将所述轮椅部从所述床体部中水平拉出,来使所述轮椅板上的电磁对接口与所述床体部上的电磁对接口分离。
60.在具体的应用中的另一个实施例中,具体的对接和分离方法如下:
61.床椅一体化机器人分离操作时步骤如下:
62.步骤1、护理人员将被护理人员平移至轮椅部2的臀板23上;
63.步骤2、护理人员将轮椅部2从床体部1水平拉出,使轮椅板上的电磁对接口与床体部2上的电磁对接口分离;
64.步骤3、护理人员将可拆卸扶手22安装上并通过旋钮210拧紧;
65.步骤4、护理人员通过控制轮椅控制箱219,控制椅背电动推杆212以及屈腿电动推杆222,控制轮椅部2形成轮椅姿态
66.床椅一体化机器人合体操作时步骤如下:
67.步骤1、判断所对接床体部1的高度,若高度相同,进行步骤3,否则进行步骤2;
68.步骤2、调整床体部1的高度,返回步骤1;
69.步骤3、护理人员拔出旋钮210将可拆卸扶手22拆卸下来;
70.步骤4、护理人员推动轮椅部2,使轮椅板2上的电磁对接口插入或搭接的方式与床体部2上的电磁对接口对接;
71.5、护理人员将被护理人员平移至护理床中央。
72.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
73.此外,术语“第一”、仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
74.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
75.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
76.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
77.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
78.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1