一种柔性牵引式自适应角度调节手术牵开装置的制作方法
1.本发明涉及医疗辅助器械,具体涉及一种柔性牵引式自适应角度调节手术牵开装置。
背景技术:
2.手术牵开器是一种常用的手术医疗器械,用于牵拉切口周围的组织(皮肤、肌肉、肌腱、筋膜和韧带等),以充分暴露手术视野,提高手术质量。现有的手术牵开器多以手动安装、手动牵引为主,然而安装和牵引过程中的操作较为繁琐,不仅无法实现牵开锁止位置的无极调节,更没有自适应角度调节和自动牵开功能。
3.在适用性方面,现有手术牵开器,主要存在以下问题:
4.1、现有牵开器,通常只能实现几个固定俯仰角的径向牵开,不能依据病患切口位置周围组织特征、根据各类手术切口牵拉方向特定要求进行自适应调整,不具备牵开仰俯角度和牵开方向的调节功能,给特殊身材和特定位置的手术带来不便。
5.2、现有牵开器由于牵开角度固定,容易形成拉钩边缘与肌肉组织点接触或者线接触的情况,受力面积小,压强比较大,容易脱钩,从而造成切口处肌肉组织二次损伤。
6.3、现有牵开器在工作时,拉钩会受到手术切口周围组织极大的反向拉力,存在较高的牵开时脱手、工作时脱钩、解锁时脱手等被快速回拉的风险,所造成后果不堪设想。不仅如此,在解锁牵开器拉钩时,需要先拉开一小段距离,再放松解锁,存在解锁时的不便,以及切口周围组织再次损伤风险。
7.4、现有牵开器的牵开位置多以特定挡位的手动调节为主,无法实现任意位置锁止的无极调节,锁止档位的间隔距离较大,无法准确调节至手术切口所需暴露的最佳位置,容易造成手术切口处撕裂、肌肉组织损伤,亦或牵开张紧力不足,影响手术操作,难以匹配现代手术要求。
8.5、现有牵开器,虽结构简单、成本低廉,但结构通用性和牵开稳定性等功能适用性不强。手术中,常常需要一位专门的护理人员进行辅助,以确保拉钩的牵开效果,造成了人力资源浪费,同时存在难以回避的稳定性风险。
技术实现要素:
9.本发明要解决的技术问题是克服现有技术的不足,提供一种可自动调节手术视野,可防止手术拉钩回退,能够根据手术切口周围组织特征、各类手术切口牵拉方向特定要求进行自适应调整的柔性牵引式自适应角度调节手术牵开装置。
10.为解决上述技术问题,本发明采用如下技术方案:
11.一种柔性牵引式自适应角度调节手术牵开装置,包括圆盘座、支撑机构、自适应角度调节座和多个牵开机构,所述圆盘座设于所述支撑机构上,所述自适应角度调节座设于所述圆盘座上并可绕所述圆盘座的轴线旋转,多个所述牵开机构设于所述自适应角度调节座上,所述牵开机构包括手术拉钩、牵引绳、卷轴、用于驱动卷轴旋转的驱动组件、用于对卷
轴进行限位的锁止组件、以及用于防止手术拉钩回退速度过快的防护组件,所述牵引绳的一端缠绕于所述卷轴上,所述牵引绳的另一端与所述手术拉钩相连。
12.作为上述技术方案的进一步改进:所述自适应角度调节座上设有多个滑槽,多个所述滑槽形成多边形结构,所述牵开机构可移动的设于所述滑槽中。
13.作为上述技术方案的进一步改进:所述圆盘座上设有圆形凹槽,所述圆形凹槽中设有万向轮,所述自适应角度调节座与所述万向轮相连。
14.作为上述技术方案的进一步改进:所述自适应角度调节座的底部设有楔形块,所述万向轮的连接部上设有楔形槽,所述楔形块与所述楔形槽配合,所述圆形凹槽的外侧或者内侧设有拆装槽,所述拆装槽与所述圆形凹槽之间设有通道。
15.作为上述技术方案的进一步改进:所述防护组件包括转盘、第一棘轮、第一棘爪、导杆、以及第一弹簧,所述转盘套于所述第一棘轮内并与所述卷轴相连,所述第一棘轮固定设置,所述转盘上设有固定套筒,所述导杆可移动的穿设于所述固定套筒内,所述第一棘爪的一端与所述转盘铰接,所述第一棘爪的另一端与所述导杆连接,所述导杆远离所述第一棘爪的一端设有凸台,所述第一弹簧套设于所述导杆上并抵设于所述固定套筒与所述凸台之间。
16.作为上述技术方案的进一步改进:所述牵开机构还包括牵开机构底座,所述驱动组件和所述锁止组件均设于所述牵开机构底座上。
17.作为上述技术方案的进一步改进:所述驱动组件包括第一驱动电机和减速器,所述第一驱动电机设于所述牵开机构底座上,所述第一驱动电机通过所述减速器与所述卷轴相连。
18.作为上述技术方案的进一步改进:所述锁止组件包括第二棘轮、第二棘爪和用于驱动第二棘爪旋转的第二驱动电机,所述第二驱动电机设于所述牵开机构底座上,所述第二棘爪设于所述第二驱动电机的输出轴上,所述第二棘轮设于所述卷轴上,所述第二棘爪与所述第二棘轮配合。
19.作为上述技术方案的进一步改进:所述锁止组件还包括第二弹簧,所述第二棘爪远离所述第二棘轮的一端设有抵接部,所述第二弹簧的一端与所述抵接部抵接,所述第二弹簧的另一端与所述牵开机构底座抵接。
20.作为上述技术方案的进一步改进:所述支撑机构包括支撑座、套筒和拉伸杆,所述套筒设于所述支撑座上,所述拉伸杆穿设于所述套筒中,所述圆盘座与所述拉伸杆相连。
21.与现有技术相比,本发明的有益效果在于:
22.本发明公开的柔性牵引式自适应角度调节手术牵开装置,圆盘座通过支撑机构安装于手术床上,通过自适应角度调节座上的多个牵开机构自动牵拉手术切口周围的组织,使手术视野扩大,牵引过程中,牵开机构会受到肌肉组织的反向拉力,使自适应角度调节座向拉力的方向自适应旋转。具体地,医生持手术拉钩将组织钩住,通过驱动组件驱动卷轴旋转,使缠绕在卷轴上的牵引绳收紧,从而通过手术拉钩将手术切口周围的组织牵引开,扩大手术视野,实现对手术拉钩的无极调节,操作方便,可自动调节手术视野,不需要人工牵拉手术拉钩,减轻医生的工作强度,通过牵引绳可实现从不同的俯仰角度牵开组织,改善手术拉钩和肌肉组织的配合问题,能够根据手术切口周围组织特征、各类手术切口牵拉方向特定要求进行自适应调整,提高手术效率,避免脱钩,通过锁止组件限制卷轴反向旋转,从而
防止手术拉钩在组织拉力的作用下回退,避免造成组织损伤,手术结束后,松开锁止组件,通过组织的拉力带动手术拉钩回退,使卷轴反向旋转,同时驱动组件驱动卷轴反向旋转,通过卷轴旋转的速度限制手术拉钩回退的速度,实现手术拉钩运动速度可控,当手术拉钩回退速度过快时,防护组件启动,使卷轴停止旋转,手术拉钩停止回退,防止多个手术拉钩碰撞造成组织损伤,待回退到位后,将手术拉钩取下,消毒备用。
附图说明
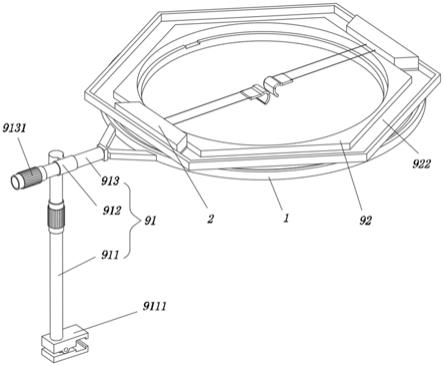
23.图1为本发明柔性牵引式自适应角度调节手术牵开装置的结构示意图。
24.图2为本发明中圆盘座和支撑机构的结构示意图。
25.图3为图2中a处放大图。
26.图4为本发明中万向轮的结构示意图。
27.图5为本发明中拆装口处的局部示意图。
28.图6为本发明中自适应角度调节座背面的局部示意图。
29.图7为本发明中牵开机构的结构示意图。
30.图8为本发明中牵开机构内套设有第一保护罩和第二保护罩的结构示意图。
31.图9为本发明锁止组件处的局部放大图。
32.图10为本发明中牵开机构内拆除第一保护罩和第二保护罩后的结构示意图。
33.图11为本发明中防护组件和卷轴连接方式的结构示意图。
34.图12为本发明中防护组件的正视结构示意图。
35.图中各标号表示:1、圆盘座;11、圆形凹槽;12、万向轮;121、连接部;122、楔形槽;13、拆装槽;14、通道;15、拆装口;2、牵开机构;21、牵开机构底座;22、牵开机构保护罩;3、手术拉钩;4、牵引绳;5、卷轴;6、驱动组件;61、第一驱动电机;62、减速器;63、供电单元;64、第一保护罩;7、锁止组件;71、第二棘轮;72、第二棘爪;721、抵接部;73、第二驱动电机;74、第二弹簧;75、第二保护罩;8、防护组件;81、转盘;811、固定套筒;82、第一棘轮;83、第一棘爪;831、移动槽;84、导杆;841、销接部;842、凸台;85、第一弹簧;91、支撑机构;911、支撑座;9111、夹具;912、套筒;913、拉伸杆;9131、手柄;92、自适应角度调节座;921、楔形块;922、滑槽。
具体实施方式
36.以下结合说明书附图和具体实施例对本发明作进一步详细说明。
37.如图1至图12所示,本实施例的柔性牵引式自适应角度调节手术牵开装置,包括圆盘座1、支撑机构91、自适应角度调节座92和多个牵开机构2,圆盘座1设于支撑机构91上,自适应角度调节座92设于圆盘座1上并可绕圆盘座1的轴线旋转,多个牵开机构2设于自适应角度调节座92上,牵开机构2包括手术拉钩3、牵引绳4、卷轴5、用于驱动卷轴5旋转的驱动组件6、用于对卷轴5进行限位的锁止组件7、以及用于防止手术拉钩3回退速度过快的防护组件8,牵引绳4的一端缠绕于卷轴5上,牵引绳4的另一端与手术拉钩3相连。
38.该柔性牵引式自适应角度调节手术牵开装置,圆盘座1通过支撑机构91安装于手术床上,通过自适应角度调节座92上的多个牵开机构2自动牵拉手术切口周围的组织,使手术视野扩大,牵引过程中,牵开机构2会受到肌肉组织的反向拉力,使自适应角度调节座92
向拉力的方向自适应旋转。具体地,医生持手术拉钩3将组织钩住,通过驱动组件6驱动卷轴5旋转,使缠绕在卷轴5上的牵引绳4收紧,从而通过手术拉钩3将手术切口周围的组织牵引开,扩大手术视野,实现对手术拉钩3的无极调节,操作方便,可自动调节手术视野,不需要人工牵拉手术拉钩3,减轻医生的工作强度,通过牵引绳4可实现从不同的俯仰角度牵开组织,改善手术拉钩3和肌肉组织的配合问题,能够根据手术切口周围组织特征、各类手术切口牵拉方向特定要求进行自适应调整,提高手术效率,避免脱钩,通过锁止组件7限制卷轴5反向旋转,从而防止手术拉钩3在组织拉力的作用下回退,避免造成组织损伤,手术结束后,松开锁止组件7,通过组织的拉力带动手术拉钩3回退,使卷轴5反向旋转,同时驱动组件6驱动卷轴5反向旋转,通过卷轴5旋转的速度限制手术拉钩3回退的速度,实现手术拉钩3运动速度可控,当手术拉钩3回退速度过快时,防护组件8启动,使卷轴5停止旋转,手术拉钩3停止回退,防止多个手术拉钩3碰撞造成组织损伤,待回退到位后,将手术拉钩3取下,消毒备用。
39.本实施例中,自适应角度调节座92上设有多个滑槽922,多个滑槽922形成多边形结构,牵开机构2可移动的设于滑槽922中,滑槽922的数量大于牵开机构2的数量,每个滑槽922中仅设置一个牵开机构2。优选地,在自适应角度调节座92上设有六个滑槽922,当多个牵开机构2进行牵引工作时,自适应角度调节座92会随着拉力的方向旋转,同时牵开机构2也可以在滑槽922中移动,实现系统的自适应调整,实现系统的受力自平衡。
40.本实施例中,圆盘座1上设有圆形凹槽11,圆形凹槽11中设有万向轮12,自适应角度调节座92与万向轮12相连。圆形凹槽11与圆盘座1同心,自适应角度调节座92通过万向轮12在圆形凹槽11上旋转,方便自适应角度调节座92的自适应调整。
41.本实施例中,自适应角度调节座92的底部沿圆周方向间隔设有多个楔形块921,万向轮12的连接部121上设有可与楔形块921配合的楔形槽122,圆形凹槽11的外侧或者内侧设有拆装槽13,拆装槽13与圆形凹槽11之间设有通道14。具体地,通过楔形块921和楔形槽122的配合方便自适应角度调节座92的拆装,万向轮12在不使用时放置于拆装槽13中。拆装槽13优选设有两个,当安装自适应角度调节座92时,将万向轮12从拆装槽13中移动至通道14处,将自适应角度调节座92的楔形块921与万向轮12上的楔形槽122对准,工具从圆盘座1上的拆装口15处伸入推动连接部121使楔形槽122与楔形块921配合,配合完毕后万向轮12进入圆形凹槽11中并将自适应角度调节座92旋转一定角度进行下一个万向轮12的安装,当需要维修自适应角度调节座92时,从反向推动连接部121使楔形槽122与楔形块921分离,使万向轮12从圆形凹槽11中经通道14移动至拆装槽13中,从而方便自适应角度调节座92的拆装,方便维护,在其他实施例中,拆装槽13、通道14和拆装口15可设置多个,通过多个拆装槽13、通道14和拆装口15可同时拆装自适应角度调节座921,加快自适应角度调节座921的拆装速度。各组件之间的配合无细小零部件参与,装配简单且可靠,避免拆装过程中细小零部件掉落于手术台上引发医疗事故,降低手术风险。
42.本实施例中,防护组件8包括转盘81、第一棘轮82、第一棘爪83、导杆84、以及第一弹簧85,转盘81套于第一棘轮82内并与卷轴5相连,第一棘轮82固定设置,转盘81上设有固定套筒811,导杆84可移动的穿设于固定套筒811内,第一棘爪83的一端与转盘81铰接,第一棘爪83的另一端与导杆84连接,导杆84远离第一棘爪83的一端设有凸台842,第一弹簧85套设于导杆84上并抵设于固定套筒811与凸台842之间。具体地,当手术拉钩3回退速度过快
时,第一棘爪83在离心力的作用下向外运动,使第一棘爪83与第一棘轮82配合,此时转盘81和卷轴5停止旋转,手术拉钩3停止退回,防止多个手术拉钩3碰撞造成组织损伤,待确认安全后,将第一棘爪83与第一棘轮82分离,通过第一弹簧85使第一棘爪83复位,通过导杆84对第一棘爪83移动进行导向和限位。
43.本实施例中,导杆84上设有销接部841,第一棘爪83上设有供销接部841移动的移动槽831。第一棘爪83在离心力的作用下沿铰接点向外侧运动,通过移动槽831实现销接部841在第一棘爪83上运动。
44.本实施例中,牵开机构2还包括牵开机构底座21和牵开机构保护罩22,驱动组件6和锁止组件7均设于牵开机构底座21上,通过牵开机构保护罩22保护内部的零件,避免灰尘影响。驱动组件6包括第一驱动电机61、减速器62和供电单元63,第一驱动电机61设于牵开机构底座21上,第一驱动电机61通过减速器62与卷轴5相连。通过供电单元63给第一驱动电机61供电,在牵开机构保护罩22外可通过无线充电器给供电单元63进行无线充电(无线充电技术为现有技术,类似手机无线充电器,具体不再赘述),简单方便,不需要打开牵开机构保护罩22充电,提高装置密封性。当第一驱动电机61启动后,通过减速器62降低输出转速增加输出转矩从而带动卷轴5旋转,使卷轴5能有效的收紧牵引绳4,可以配合不同身体特征和手术部位的特殊性,工作稳定性高。牵开机构底座21上设有用于保护驱动组件6的第一保护罩64,避免杂质进入,提高密封性。
45.本实施例中,驱动组件6设有两组并分别位于卷轴5的两端。通过两组驱动组件6驱动卷轴5旋转,进一步使手术拉钩3运动更加平稳,增加对组织的牵引力。
46.本实施例中,锁止组件7包括第二棘轮71、第二棘爪72和用于驱动第二棘爪72旋转的第二驱动电机73,第二驱动电机73设于牵开机构底座21上,第二棘爪72设于第二驱动电机73的输出轴上,第二棘轮71设于卷轴5上,第二棘爪72与第二棘轮71配合。供电单元63可同时给第一驱动电机61和第二驱动电机73供电,当驱动组件6驱动卷轴5旋转收紧牵引绳4时,第二棘爪72在第二棘轮71上滑动,通过第二棘爪72限制第二棘轮71反向旋转,通过第二驱动电机73驱动第二棘爪72旋转,以使第二棘爪72与第二棘轮71分离。
47.本实施例中,锁止组件7还包括第二弹簧74,第二棘爪72远离第二棘轮71的一端设有抵接部721,第二弹簧74的一端与抵接部721抵接,第二弹簧74的另一端与牵开机构底座21抵接。通过第二弹簧74使第二棘爪72与第二棘轮71保持配合,进一步提高组件的稳定性,可以在牵开机构底座21和抵接部721上均开设有供第二弹簧74伸入的安装槽,通过安装槽对第二弹簧74进行限位。锁止组件7还包括第二保护罩75,用于保护第二驱动电机73,避免杂质进入,提高密封性。
48.本实施例中,锁止组件7设有两组并分别位于卷轴5的两端。通过两组锁止组件7限制卷轴5旋转,可靠性更高。
49.本实施例中,牵引绳4优选设有两根。通过两根牵引绳4牵引手术拉钩3,使牵引过程更稳定。
50.本实施例中,支撑机构91包括支撑座911、套筒912和拉伸杆913,支撑座911的底部设有夹具9111,支撑座911通过夹具9111安装于手术床上,套筒912设于支撑座911的顶部,拉伸杆913穿设于套筒912中,圆盘座1与拉伸杆913的一端相连,拉伸杆913的另一端设有手柄9131,握住手柄9131可调节圆盘座1的位置,结构简单,调节方便。
51.虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1