一种紧凑的单孔手术机器人从手
1.本发明属于医疗机械领域,尤其是一种手术机器技术,具体地说是一种紧凑的单孔手术机器人从手。
背景技术:
2.在现代微创手术中,医生面临手术复杂度高、器械更换频繁等问题,这给手术带来巨大挑战。频繁地更换手术器械不仅耗时耗力,而且会对病人身体造成更大的负担。微创手术创口大小不等,一般为0.5-3cm左右,但创口较多,多为3个及以上。虽创口较小,但多个创口治愈时间较长,术后疤痕影响美观。
3.单孔手术通过单一通道进入多个手术操作器械及内窥镜,能够进一步减少创伤、减少术中出血、减少术后疼痛及并发症并给患者带来良好的美容效果。现有的单孔手术机器人大多需要几个机械臂同时存在于套管中,这对手术机器人伤口大小要求较高。
技术实现要素:
4.本发明的目的是针对现有单孔微创手术对患者身体造成创口较大的问题。发明一种紧凑的单孔手术机器人从手,利用此手术机器人开展微创手术,可以达到安全、精准、高效等效果,具有手术创伤较其他单孔手术机器人更小、术中出血量少、住院时间短、术后恢复更快等优势。
5.本发明的技术方案是:一种紧凑的单孔手术机器人从手,其特征在于:它主要包括两个手术操作机械臂1和一个摄像头机械臂2,手术操作机械臂用于手术操作,摄像头机械臂用于实时照亮和观察手术部位情况;手术操作机械臂1包括手术操作机械臂支撑杆1-1,杆一1-2,杆二1-3,杆三1-4,杆四1-5,杆五1-6,杆六1-7,杆七1-8,旋转手腕1-9,夹子1-10,偏转驱动丝1-11,偏转连续体单元1-12,丝套1-13,关节驱动丝1-14;手术操作机械臂支撑杆1-1端部设有贯通的关节驱动丝通道1-1-1和偏转驱动丝通道1-1-2以供驱动丝套1-13和关节驱动丝1-14穿过,驱动丝套1-13是弹簧管或者其他材料的耐压管;手术操作机械臂支撑杆1-1与杆一1-2之间有几个偏转连续体单元1-12,手术操作机械臂支撑杆1-1与偏转连续体单元1-12之间、杆一1-2与偏转连续体单元1-12之间以及偏转连续体单元1-12相互之间由柔性铰链连接,柔性铰链是一种薄片式弹性结构;杆一1-2与杆二1-3、杆二1-3与杆三1-4、杆三1-4与杆四1-5、杆四1-5与杆五1-6、杆五1-6与杆六1-7以及杆六1-7与杆七1-8之间都由刚性旋转铰链关节连接,并且相邻的铰链轴线正交;旋转手腕1-9的旋转轴与杆七1-8中的圆柱孔共线,旋转手腕1-9与杆七1-8之间有轴承连接以使得两者之间相对转动摩擦较小;旋转手腕1-9上有一对夹子1-10,其中一个夹子与旋转手腕1-9固定,另外一个夹子1-10与旋转手腕1-9铰接;偏转驱动丝1-11穿过手术操作机械臂支撑杆1-1上的偏转驱动丝通道1-1-2并且末端与杆一1-2固定;其中手术操作机械臂支撑杆1-1上方的偏转驱动丝通道1-1-2处向外侧开有槽,对应的偏转连续体单元1-12和杆一1-2下方的偏转驱动丝通道1-1-2处向外侧也开有槽,这样
可以使得偏转驱动丝1-11移到外侧以使得偏转驱动丝1-11到柔性铰链的距离增加,提高偏转驱动丝1-11对柔性铰链的力矩,增强刚性和稳定性;杆一1-2中的关节驱动丝通道1-1-1和偏转驱动丝通道1-1-2较短;摄像头机械臂2包括摄像头机械臂支撑杆2-1,偏转关节2-2,摄像头机械臂偏转杆2-3,摄像头机械臂摆动关节单元2-4和摄像头2-5;多个摄像头机械臂摆动关节单元2-4组成连续体机械臂;摄像头机械臂摆动关节单元2-4圆周均匀布置4个小孔,四根驱动丝穿过摄像头机械臂支撑杆2-1、偏转关节2-2、摄像头机械臂偏转杆2-3以及摄像头机械臂摆动关节单元2-4上的小孔与摄像头2-5固定;摄像头机械臂偏转杆2-3与摄像头机械臂摆动关节单元2-4,摄像头机械臂摆动关节单元2-4与摄像头机械臂摆动关节单元2-4以及摄像头机械臂摆动关节单元2-4与摄像头2-5之间由中心弹性杆或者相邻轴线正交的刚或柔性铰链连接,四根驱动丝驱动摄像头两个自由度摆动。所述套管3、手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1为刚性件。从套管轴向方向来看,两个手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1的横截面构成一个圆环。伸直状态下,每个机械臂除支撑杆外,其余部分从支撑杆轴向方向来看,其横截面在中间通道与所在机械臂的支撑杆横截面区域内。这样可以达到两个目的,一是驱动丝较为均匀地分布于套管内四周,从而充分利用套管内空间,并且伸直状态下,支撑杆轴向方向三个机械臂的横截面积之和远大于三个机械臂支撑杆所占用套管的横截面积之和,这样就达到所需套管内径比传统单孔手术机器人更小、结构更加紧凑的目的;二是每个机械臂从支撑杆轴向方向来看的横截面积大于中心通道截面积,意味着机械臂的关节驱动丝到所驱动的关节轴线的距离更大,相同的驱动丝拉力下,关节力矩更大,从而达到机械臂输出力更大的目的。
6.所述套管3、手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1也可以为柔性件以拓展本发明的机器人从手到无创的经自然腔道手术中。。
7.所述摄像头机械臂2能换成手术操作机械臂1,这样套管3中同时有三个手术操作机械臂1;摄像头机械臂整体就是圆柱形的机械臂,可以从另外的创口进入;摄像头机械臂也可以与套管从同一个创口进入,这种情况下,摄像头机械臂在套管进入腹腔内之前进入腹腔,此时摄像头机械臂根部安装有磁铁,由外部磁铁将摄像头机械臂吸附在腹内壁上,外部磁铁也可以牵引摄像头机械臂在腹内壁移动位置;此时的摄像头机械臂可以是多个电机驱动的机械臂,并且机械臂中嵌入电池、处理器、无线通信模块,这样机械臂可以通过无线控制并传输信息,也可以通过导线引出传输能源与信号。
8.所述摄像头2-5由四根驱动丝共同拉动多个摄像头机械臂摆动关节单元2-4组成的连续体机械臂,也可以由八根驱动丝拉动两段多个摄像头机械臂摆动关节单元2-4组成的连续体机械臂,每段连续体机械臂由四根驱动丝驱动,这样摄像头就可以有四个自由度。
9.手术操作机械臂1的杆一1-2、杆二1-3、杆三1-4、杆四1-5、杆五1-6、杆六1-7和杆七1-8能换成所述的四自由度连续体机械臂,这样机械臂具有较高的柔性,在无创的经自然腔道手术中,可以更容易地通过柔性弯曲的套管3。
10.所述旋转手腕1-9和夹子1-10的应变较大处可以贴应变片以感知夹子1-10的受力。
11.所述手术操作机械臂支撑杆1-1与偏转连续体单元1-12之间、杆一1-2与偏转连续体单元1-12之间以及偏转连续体单元1-12与偏转连续体单元1-12之间的柔性铰链也可以是刚性铰链。
12.所述偏转驱动丝1-11也可以是一个直径较大、刚度较大的偏转驱动杆,对应手术操作机械臂支撑杆1-1上的偏转驱动丝通道1-1-2也相应地直径较大,这样偏转驱动杆是一个两段铰接的连杆结构,其中一段在偏转驱动丝通道1-1-2中移动,另外一段连杆的一端与第一段连杆铰接,另外一端与杆一1-2铰接;这样偏转驱动杆不仅仅可以受拉也可以受压,即偏转驱动杆可以驱动杆一1-2来回转动,这样就可以为手术操作机械臂1增加一个自由度。
13.所述偏转驱动丝1-11和关节驱动丝1-14与驱动它们的转轮或者直线运动机构之间有力传感器以检测驱动丝的拉力。
14.本发明的有益效果是:本发明为实现手术时只需开一个创口提供了保障,手术时只需将摄像头机械臂和手术操作机械臂依次送进套管,并用内管插入到中间通道中,从而提高三个机械臂的刚度。内管中还可以伸入另外一个机械臂用以递送缝针、取出病变组织等。利用此手术机器人开展微创手术,可以达到安全、精准、高效等效果,具有手术创伤小、术中出血量少、住院时间短、术后恢复更快等优势。此外,本发明还可以容易地转化成柔性的经自然腔道手术机器人,如经口腔食道的胃部手术,经肛门的结肠内手术等。本发明属于医疗机械领域。
附图说明
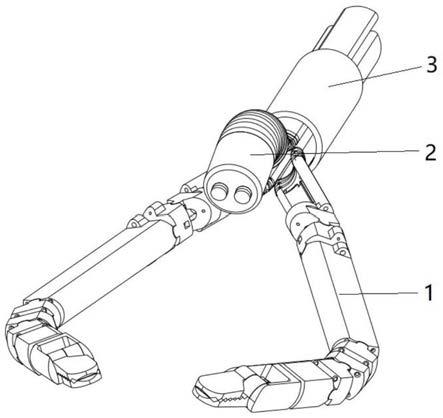
15.图1为紧凑单孔手术机器人总体图。
16.图2为手术操作机械臂细节图。
17.图3为操作机械臂尾部细节图。
18.图4为手术操作机械臂内侧细节图。
19.图5为摄像头机械臂细节图。
20.图6为手术操作机械臂驱动丝布置图。
21.图7为机器人安装示意图。
22.图示说明:1,手术操作机械臂 2,摄像头机械臂3,套管 1-1,手术操作机械臂支撑杆1-2,杆一1-3,杆二1-4,杆三1-5,杆四1-6,杆五1-7,杆六 1-8,杆七 1-9,旋转手腕1-10,夹子1-11,偏转驱动丝1-12,偏转连续体单元1-13,驱动丝套1-14,关节驱动丝 1-1-1关节驱动丝通道 1-1-2偏转驱动丝通道 2-1摄像头机械臂支撑杆 2-2 偏转关节 2-3摄像头机械臂偏转杆2-4摄像头机械臂摆动关节单元 2-5摄像头。
具体实施方式
23.下面结合附图与具体实施方式对本发明作进一步详细描述:如图1-7所示。
24.一种紧凑的单孔手术机器人从手,它主要包括两个手术操作机械臂1和一个摄像头机械臂2和一个套管3,两个手术操作机械臂1 的操作端套装在套管3中,如图1所示,具体实施时,若是单孔腹腔镜手术等其他需要手术切口的手术,所述套管3、手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1为刚性件。若是无创的经自然腔道手术,则可将所述套管3、手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1设计成柔性件。手术操作机械臂用于手术操作,摄像头机械臂用于实时照亮和观察手术部位情况;手术操作机械臂1如图2
所示,它包括手术操作机械臂支撑杆1-1,杆一1-2,杆二1-3,杆三1-4,杆四1-5,杆五1-6,杆六1-7,杆七1-8,旋转手腕1-9,夹子1-10,偏转驱动丝1-11,偏转连续体单元1-12,丝套1-13,关节驱动丝1-14;手术操作机械臂支撑杆1-1端部设有贯通的关节驱动丝通道1-1-1和偏转驱动丝通道1-1-2以供驱动丝套1-13和关节驱动丝1-14穿过,如图3所示,驱动丝套1-13是弹簧管或者其他材料的耐压管;手术操作机械臂支撑杆1-1与杆一1-2之间有几个偏转连续体单元1-12,如图4所示。手术操作机械臂支撑杆1-1与偏转连续体单元1-12之间、杆一1-2与偏转连续体单元1-12之间以及偏转连续体单元1-12相互之间由柔性铰链连接,柔性铰链是一种薄片式弹性结构;杆一1-2与杆二1-3、杆二1-3与杆三1-4、杆三1-4与杆四1-5、杆四1-5与杆五1-6、杆五1-6与杆六1-7以及杆六1-7与杆七1-8之间都由刚性旋转铰链关节连接,并且相邻的铰链轴线正交;旋转手腕1-9的旋转轴与杆七1-8中的圆柱孔共线,旋转手腕1-9与杆七1-8之间有轴承连接以使得两者之间相对转动摩擦较小;旋转手腕1-9上有一对夹子1-10,其中一个夹子与旋转手腕1-9固定,另外一个夹子1-10与旋转手腕1-9铰接;夹子1-10也可以是其他手术工具如手术剪、手术钳等。偏转驱动丝1-11穿过手术操作机械臂支撑杆1-1上的偏转驱动丝通道1-1-2并且末端与杆一1-2固定;其中手术操作机械臂支撑杆1-1上方的偏转驱动丝通道1-1-2处向外侧开有槽,对应的偏转连续体单元1-12和杆一1-2下方的偏转驱动丝通道1-1-2处向外侧也开有槽,这样可以使得偏转驱动丝1-11移到外侧以使得偏转驱动丝1-11到柔性铰链的距离增加,提高偏转驱动丝1-11对柔性铰链的力矩,增强刚性和稳定性;杆一1-2中的关节驱动丝通道1-1-1和偏转驱动丝通道1-1-2较短;摄像头机械臂2包括摄像头机械臂支撑杆2-1,偏转关节2-2,摄像头机械臂偏转杆2-3,摄像头机械臂摆动关节单元2-4和摄像头2-5,如图5所示;以杆一1-2和杆二1-3之间连接的铰链为例,关节驱动丝1-14穿过杆一1-2上的小孔与杆二1-3固定,所述小孔是两段阶梯孔,两段小孔的直径下方较大,上方较小,对应的驱动丝套1-13不能穿过杆一1-2上的小孔,但可以进入下面小孔的下段,如图6所示。另外两根驱动丝套1-13可以穿过杆一1-2两侧的小孔进入杆二1-3上的阶梯孔下段,但不能通过阶梯孔上段,对应的有两根关节驱动丝1-14穿过驱动丝套1-13并穿过杆二1-3的阶梯孔与杆三1-4固定。杆一1-2与杆二1-3以及杆二1-3与杆三1-4之间的关节均由两根关节驱动丝1-14驱动。杆一1-2上方直径较大部分、杆一1-2、杆三1-4、杆四1-5、杆五1-6、杆六1-7和杆七1-8中间均有较大的通道以通过足够数量的驱动丝套1-13和关节驱动丝1-14。此外还有四对驱动丝套1-13与杆三1-4穿过手术操作机械臂支撑杆1-1,偏转连续体单元1-12,杆一1-2的关节驱动丝通道1-1-1,再穿过杆一1-2上方、杆二1-3和杆三1-4的中间通道,类似地,驱动丝套1-13可以进入杆三1-4上方的阶梯孔但不能通过,对应的关节驱动丝1-14穿过杆三1-4上的阶梯孔,再穿过杆四1-5、杆五1-6、杆六1-7上的小孔与杆七1-8固定。其中有四根关节驱动丝1-14同时驱动杆四1-5,杆五1-6,杆六1-7,杆七1-8。类似地,还有两根关节驱动丝1-14绕过旋转手腕1-9下方的旋转轴与旋转手腕1-9固定,可以驱动旋转手腕1-9旋转。旋转手腕1-9中间也有通道可供两根驱动丝套1-13穿过,对应的两根驱动丝驱动与旋转手腕1-9铰接的夹子1-10旋转,与另外一个固定夹子一起完成夹取动作。摄像头机械臂2也有和手术操作机械臂1类似的结构;多个摄像头机械臂摆动关节单元2-4组成连续体机械臂;摄像头机械臂摆动关节单元2-4圆周均匀布置4个小孔,四根驱动丝穿过摄像头机械臂支撑杆2-1、偏转关节2-2、摄像头机械臂偏转杆2-3以及摄像头机械臂摆动关节单元2-4上的小孔与摄像头2-5固定;摄像头机械臂偏转杆2-3与摄像头
机械臂摆动关节单元2-4,摄像头机械臂摆动关节单元2-4与摄像头机械臂摆动关节单元2-4以及摄像头机械臂摆动关节单元2-4与摄像头2-5之间由中心弹性杆或者相邻轴线正交的刚或柔性铰链连接,四根驱动丝驱动摄像头两个自由度摆动。
25.具体实施时还可做如下变通:一、摄像头机械臂2能换成手术操作机械臂1,这样套管3中同时有三个手术操作机械臂1;摄像头机械臂整体就是圆柱形的机械臂,可以从另外的创口进入;摄像头机械臂也可以与套管从同一个创口进入,这种情况下,摄像头机械臂在套管进入腹腔内之前进入腹腔,此时摄像头机械臂根部安装有磁铁,由外部磁铁将摄像头机械臂吸附在腹内壁上,外部磁铁也可以牵引摄像头机械臂在腹内壁移动位置;此时的摄像头机械臂可以是多个电机驱动的机械臂,并且机械臂中嵌入电池、处理器、无线通信模块,这样机械臂可以通过无线控制并传输信息,也可以通过导线引出传输能源与信号。
26.二、摄像头2-5由四根驱动丝共同拉动多个摄像头机械臂摆动关节单元2-4组成的连续体机械臂,也可以由八根驱动丝拉动两段多个摄像头机械臂摆动关节单元2-4组成的连续体机械臂,每段连续体机械臂由四根驱动丝驱动,这样摄像头就可以有四个自由度。
27.三、手术操作机械臂1的杆一1-2、杆二1-3、杆三1-4、杆四1-5、杆五1-6、杆六1-7和杆七1-8能换成所述的四自由度连续体机械臂,这样机械臂具有较高的柔性,在无创的经自然腔道手术中,可以更容易地通过柔性弯曲的套管3。
28.四、旋转手腕1-9和夹子1-10的应变较大处可以贴应变片以感知夹子1-10的受力。
29.五、手术操作机械臂支撑杆1-1与偏转连续体单元1-12之间、杆一1-2与偏转连续体单元1-12之间以及偏转连续体单元1-12与偏转连续体单元1-12之间的柔性铰链也可以是刚性铰链。
30.六、偏转驱动丝1-11也可以是一个直径较大、刚度较大的偏转驱动杆,对应手术操作机械臂支撑杆1-1上的偏转驱动丝通道1-1-2也相应地直径较大,这样偏转驱动杆是一个两段铰接的连杆结构,其中一段在偏转驱动丝通道1-1-2中移动,另外一段连杆的一端与第一段连杆铰接,另外一端与杆一1-2铰接;这样偏转驱动杆不仅仅可以受拉也可以受压,即偏转驱动杆可以驱动杆一1-2来回转动,这样就可以为手术操作机械臂1增加一个自由度。
31.七、偏转驱动丝1-11和关节驱动丝1-14与驱动它们的转轮或者直线运动机构之间有力传感器以检测驱动丝的拉力。
32.本发明的工作原理是:偏转驱动丝1-11和关节驱动丝1-14由电机带动转轮驱动或者由直线运动机构拉动。手术操作机械臂支撑杆1-1和摄像头机械臂支撑杆2-1与直线运动机构固定,可以沿着套管3的轴向方向移动。下面结合图7描述工作原理,主要步骤分为5步。
33.1、套管从患者伤口插入固定,首先放入摄像头机械臂2,至合适位置后驱动丝驱动摄像头机械臂2的偏转关节2-2使得偏转摄像头机械臂偏转杆2-3偏转,并驱动调整摄像头2-5朝向从而获得合适的视角,并防止干涉下一个机械臂进入;2、驱动手术操作机械臂支撑杆1-1使得第一个手术操作机械臂1进入套管3;3、偏转驱动丝1-11动作使第一个手术操作机械臂1的杆一1-2至末端夹子1-10偏转,并驱动机械臂各个关节以调整手术操作机械臂1到合适的构型;4、以同样的方式驱动第二个手术操作机械臂1进入套管;
5、同样地,偏转驱动丝1-11动作使第二个手术操作机械臂1偏转,并驱动机械臂各个关节以调整手术操作机械臂到合适的构型,接着,如有必要可放入一个内管到中间通道中,以防止各个机械臂受力后沿着套管径向方向变形。
34.如需更换手术操作机械臂1,可驱动偏转驱动丝1-11以及各关节,使其处于平直状态,再将内管先抽出,再将需要更换的手术操作机械臂1拿出,接着将新的手术操作机械臂1放入,再插入内管。手术完成后,先将内管拿出,再依次将两个手术操作机械臂1、摄像头机械臂2以及套管3拿出。
35.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
36.本发明未涉及部分与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1