穿刺手术机器人及其控制方法与流程
1.本发明涉及医疗穿刺技术领域,尤其涉及一种穿刺手术机器人及其控制方法。
背景技术:
2.穿刺是指将穿刺针刺入目标腔内抽取分泌物做化验、向目标腔内注入气体或照影剂做照影检查、或向目标腔内注入药物的一种诊疗技术。现有的穿刺手术主要包括六点系统穿刺活检和十二点系统穿刺活检,这种穿刺方式穿针的次数多,对目标对象的创伤大,且容易造成感染。
3.现在临床上普遍采用穿刺和超声探头一体化设备,取样过程通过超声图像的引导依靠医生的感觉进行病灶区域的穿刺工作,这种根据医生经验和技能的穿刺过程,发生不准确穿刺的概率较大。
4.公告号为cn106901836b的中国专利申请公开了一种前列腺穿刺手术机器人,包括多个维度的运动机构,能够灵活调整穿刺针的位置和方向。但是,该方案穿刺针的朝向与预定方向之间容易出现偏差,且不易精确控制,并且该方案仍需要通过多个位置对目标对象进行穿刺,会造成多个创口,对目标对象的伤害较大。
5.因此需要设计一种新型的穿刺手术机器人已解决现有技术中存在的上述问题。
技术实现要素:
6.本发明的目的在于提供一种穿刺手术机器人,用以改善穿刺中需要从对象的多个位置进行穿针、造成多个创口的问题。
7.为实现上述目的,本发明提供了一种穿刺手术机器人,包括:角度调节单元、平面移动单元、超声成像单元和穿刺针架,所述角度调节单元和所述超声成像单元均设置于所述平面移动单元,所述平面移动单元用于驱动所述角度调节单元和所述超声成像单元移动,所述超声成像单元用于检测并生成检测对象图像信息,所述穿刺针架设置于所述角度调节单元,所述角度调节单元用于调整所述穿刺针架的方向,所述穿刺针架用于设置穿刺针。
8.本发明的穿刺手术机器人的有益效果在于:通过平面移动单元驱动角度调节单元移动,通过角度调节单元调整穿刺针架的方向,能够实现穿刺针的前端定位在空间上的一固定不动点,且通过角度调节单元和平面移动单元的调整可以使得穿刺针不同朝向时均可经过该不动点,并能够通过该不动点对不同部位进行穿刺,使得穿刺只会留下一个伤口,创伤小、感染几率小,且根据不同的使用要求可以调整每次使用时固定不动点所在的方位;通过超声成像单元检测并生成检测对象图像信息,超声成像单元对穿刺工作进行图像定位引导,便于实际使用时根据穿刺位置的不同进行调整;穿刺针架能够固定穿刺针的行进方向,防止穿刺针发生偏移。
9.在一种可行的方案中,所述角度调节单元包括:第一移动机构、第一角度调节机构和第二角度调节机构,所述第一移动机构与所述第一角度调节机构连接,且所述第一移动
机构和所述第一角度调节机构中的任意一个与所述平面移动单元连接,所述第二角度调节机构与所述第一移动机构和所述第一角度调节机构中的任意一个连接,所述第一角度调节机构用于调整所述第一移动机构和所述第二角度调节机构中的至少一个的方向,所述第一移动机构用于带动所述第二角度调节机构和所述第一移动机构中的至少一个移动,所述穿刺针架设置于所述第二角度调节机构,所述第二角度调节机构用于调整所述穿刺针架的方向。其有益效果在于:通过第一角度调节机构调整穿刺针架映射在第一平面内的角度,通过第二角度调节机构调整穿刺针架映射在第二平面内的角度,再通过第一移动机构对穿刺针架进行位置补偿,使穿刺针架定位在空间上的一固定不动点。
10.在一种可行的方案中,所述第一角度调节机构包括:第一滑动组件、第二滑动组件和第一驱动机构,所述第一驱动机构分别与所述第一滑动组件和所述第二滑动组件连接,所述第一驱动机构用于驱动所述第一滑动组件的滑块和所述第二滑动组件的滑块反向运动。其有益效果在于:通过第一驱动机构的驱动带动两个滑动组件上的滑块的反向运动,进而实现了穿刺针架在平面内的角度调节。
11.在一种可行的方案中,所述第一角度调节机构还包括减速组件,所述减速组件设有至少两组,所述第一驱动机构与所述第一滑动组件通过至少一组所述减速组件连接,所述第一驱动机构与所述第二滑动组件通过至少一组所述减速组件连接。其有益效果在于:这样设置便于降低第一驱动机构与第一滑动组件和第二滑动组件之间的传动比,能够提升控制的精度。
12.在一种可行的方案中,所述第二角度调节机构与所述第一角度调节机构结构相同。其有益效果在于:便于降低加工难度、降低组装复杂程度。
13.在一种可行的方案中,所述第一角度调节机构包括:弧形导向组件和第二驱动机构,所述弧形导向组件设置于所述平面移动单元,所述弧形导向组件与所述第二驱动机构连接,所述第二驱动机构用于带动所述弧形导向组件的滑块转动。其有益效果在于:通过第二驱动机构的驱动带动弧形导向组件的滑块转动,进而实现了穿刺针架在平面内的角度调节。
14.在一种可行的方案中,还包括第二移动机构,所述第二移动机构设置于所述平面移动单元,且所述第二移动机构与所述超声成像单元不平行设置,所述角度调节单元设置于所述第二移动机构,所述第二移动机构用于调整所述角度调节单元的位置。其有益效果在于:一方面代替平面移动单元对穿刺针架进行位置补偿,另一方面便于调整角度调节单元与超声成像单元之间的距离。
15.在一种可行的方案中,所述平面移动单元包括:第三移动机构、第四移动机构和第五移动机构,所述第四移动机构和所述第五移动机构均设置在所述第三移动机构上,所述第四移动机构和所述第三移动机构相互垂直设置,所述第五移动机构与所述第四移动机构平行设置,所述角度调节单元设置在所述第四移动机构上,所述超声成像单元设置在所述第五移动机构上。其有益效果在于:通过第三移动机构带动其上结构在第一方向上移动,通过第四移动机构带动角度调节单元以及穿刺针架在垂直于第一方向的第二方向上移动,通过第五移动机构带动超声成像单元在平行于第二方向的方向上移动,这样便于调整各单元的位置,便于实际使用。
16.在一种可行的方案中,所述超声成像单元包括:超声探头、成像装置和转动调节装
置,所述转动调节装置设置于所述平面移动单元,所述超声探头设置于所述转动调节装置,所述转动调节装置用于带动所述超声探头转动,所述超声探头与所述成像装置电连接,所述成像装置用于将所述超声探头检测到的信息转换成图像信息并显示。其有益效果在于:通过超声探头检测目标腔内信息并通过成像装置转换成图像信息,便于观察定位,通过转动调节装置可调整超声探头的角度,便于控制超声探头的检测方位。
17.在一种可行的方案中,所述穿刺针架包括:保持架和至少两组加持组件,所述至少两组加持组件设置于所述角度调节单元,所述保持架的一端固定设置于一组所述加持组件,所述保持架的另一端活动设置于至少一组所述加持组件。其有益效果在于:保持架一端固定一端活动,便于适应调整角度时两个加持组件之间的间距变化,同时也便于调整保持架的一端距空间上的固定不动点之间的距离,便于实际使用。
18.本发明还提供了一种穿刺手术机器人的控制方法,包括以下步骤:
19.s1:通过所述平面移动单元驱动所述超声成像单元移动,使所述超声成像单元移动至检测位置;
20.s2:通过所述超声成像单元获取检测对象图像信息;
21.s3:通过所述平面移动单元驱动所述角度调节单元移动,通过所述角度调节单元调整所述穿刺针架的方向,使所述穿刺针架移动至检测位置并朝向指定方向;
22.s4:通过所述穿刺针架推动穿刺针进行穿刺。
23.其有益效果在于:通过平面移动单元带动超声成像单元移动至检测位置,并通过超声成像单元向检测对象发射超声波,接收并处理反射的波信号得到检测对象的图像信息,之后通过平面移动单元移动角度调节单元至指定位置,再通过角度调节单元调整穿刺针架的方向至检测方向,之后通过穿刺针架推动穿刺针进行穿刺提取检测对象的分泌物,之后可根据需要重复上述步骤。
附图说明
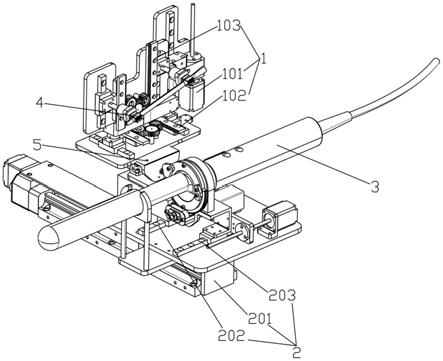
24.图1为本发明第一种实施例中穿刺手术机器人的结构示意图;
25.图2为图1中角度调节单元和穿刺针架的结构示意图;
26.图3为图2中a处的放大结构示意图;
27.图4为图1中穿刺手术机器人的主视结构示意图;
28.图5为图1中穿刺手术机器人的俯视结构示意图;
29.图6为图1中穿刺针架角度调节示意图;
30.图7为图1中超声成像单元和第五移动机构的结构示意图;
31.图8为本发明第二种实施例中角度调节单元和穿刺针架的结构示意图;
32.图9为本发明第三种实施例中穿刺手术机器人的控制方法示意图。
33.图中附图标记如下:
34.1、角度调节单元;
35.101、第一移动机构;1011、第一丝杆电机;1012、丝杆螺母;1013、第一固定板;1014、第一导轨;1015、第一滑块;
36.102、第一角度调节机构;
37.1021、第一滑动组件;10211、第二导轨;10212、第二滑块;10213、齿条;
38.1022、第二滑动组件;
39.1023、第一驱动机构;10231、第二固定板;10232、第一电机;10233、第一齿轮;
40.1024、减速组件;10241、固定柱;10242、第二齿轮;
41.1025、弧形导向组件;10251、弧形齿条;10252、第三滑块;10253、第三固定板;10254、弧形导轨;
42.1026、第二驱动机构;10261、第五齿轮;
43.103、第二角度调节机构;
44.2、平面移动单元;201、第三移动机构;202、第四移动机构;203、第五移动机构;
45.3、超声成像单元;301、超声探头;302、转动调节装置;303、第二电机;304、支撑板;305、固定座;306、第三齿轮;307、超声鞘;
46.4、穿刺针架;401、保持架;402、加持组件;403、夹具;404、固定轴;5、第二移动机构;501、第二丝杆电机;502、滑动板。
具体实施方式
47.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
48.针对现有技术存在的问题,本发明的实施例提供了一种穿刺手术机器人。
49.图1为本发明第一种实施例中穿刺手术机器人的结构示意图,图2为图1中角度调节单元和穿刺针架的结构示意图,图4为图1中穿刺手术机器人的主视结构示意图,图5为图1中穿刺手术机器人的俯视结构示意图。
50.本发明一些实施例中,参考图1、图2、图4和图5,穿刺手术机器人包括:平面移动单元2、角度调节单元1、超声成像单元3和穿刺针架4,角度调节单元1和超声成像单元3均设置于平面移动单元2,平面移动单元2用于带动角度调节单元1和超声成像单元3移动,超声成像单元3用于检测并生成检测对象图像信息,穿刺针架4设置于角度调节单元1,角度调节单元1用于调整穿刺针架4的方向,穿刺针架4用于设置穿刺针。
51.具体的说,在本实施例中,平面移动单元2水平设置,角度调节单元1和超声成像单元3一左一右固定在平面移动单元2上,平面移动单元2能够带动角度调节单元1和超声成像单元3前后左右移动,穿刺针架4设置在角度调节单元1上,超声成像单元3前后方向设置,初始时穿刺针架4平行于超声成像单元3设置,超声成像单元3利用超声声束对目标进行扫描,对反射信号进行处理、接受,以得到目标内部的图像,角度调节单元1能够调整穿刺针架4在水平面和竖直面内的朝向,并使穿刺针架4能够一直朝向空间内的一固定不动点,穿刺针架4用于放置穿刺针,使用时操作人员通过穿刺针架4推动穿刺针运动,使穿刺针沿穿刺针架4的朝向方向进行运动。
52.值得说明的是,空间的固定不动点可以根据检测的需要进行位置调整。
53.图6为图1中穿刺针架角度调节示意图。
54.本发明一些实施例中,参考图2和图6,角度调节单元1包括:第一移动机构101、第一角度调节机构102和第二角度调节机构103,第一移动机构101与第一角度调节机构102连接,且第一移动机构101和第一角度调节机构102中的任意一个与平面移动单元2连接,第二角度调节机构103与第一移动机构101和第一角度调节机构102中的任意一个连接,第一角度调节机构102用于调整第一移动机构101和第二角度调节机构103中的至少一个的方向,第一移动机构101用于带动第二角度调节机构103和第一移动机构101中的至少一个移动,穿刺针架4设置于第二角度调节机构103,第二角度调节机构103用于调整穿刺针架4的方向。
55.具体的说,在本实施例中,第一角度调节机构102水平设置在平面移动机构上,第一移动机构101竖直设置在第一角度调节机构102上,第一移动机构101包括:第一丝杆电机1011、丝杆螺母1012、第一固定板1013、第一导轨1014和第一滑块1015,第一固定板1013设置在第一角度调节机构102上,第一丝杆电机1011和第一导轨1014均固定在第一固定板1013上,第一滑块1015滑动设置在第一导轨1014上,丝杆螺母1012设置在第一丝杆电机1011的丝杆上,且丝杆螺母1012设置在第一滑块1015上,随着第一丝杆电机1011的转动能够带动第一滑块1015上下移动,第二角度调节机构103竖直设置在第一滑块1015上,穿刺针架4设置于第二角度调节机构103,使用时开启第一角度调节机构102能够调整穿刺针架4映射在水平面即第一平面内的朝向,即图6中a所指示的方向,开启第二移动机构5能够调整穿刺针架4映射在竖直面即第二平面内的朝向,即图6中b所指示的方向,图6中o点即空间的固定不动点的示意位置,此外,随着第一角度调节机构102的转动第二平面同步转动,即图6中b所指示的转动轴的位置会跟随第一角度调节机构102的转动而发生改变。第一角度调节机构102在使用时:当第一角度调节机构102转动的轴心与空间的固定不动点在同一竖直线上时,无需通过平面移动机构进行位置补偿,当第一角度调节机构102转动的轴心与空间的固定不动点不在同一竖直线上时,通过平面移动单元2带动角度调节单元1移动进行位置补偿,即可使穿刺针架4重新对准空间的固定不动点;第二角度调节机构103的使用方式与第一角度调节的使用方式相似,但第二角度调节机构103进行位置补偿时需要通过平面移动单元2和第一移动机构101共同进行。即当第一角度调节机构102带动穿刺针架4转动的轴心与空间的固定点映射在平面内的点存在位置偏差时,通过平面移动单元2带动穿刺针架4前后左右进行移动,对穿刺针架映4射在平面内的位置进行调整,使穿刺针架4的前端映射在平面上的位置重新朝向空间的固定不动点映射在平面上的位置;当第二角度调节机构103带动穿刺针架4转动的轴心与空间的固定不动点映射在穿刺针架4所在的竖直面内的点存在位置偏差时,通过第一移动机构101带动穿刺针架上下移动,对穿刺针架4映射在所在竖直面内的位置进行调整,使穿刺针架4的前端重新朝向空间的固定不动点,进而实现平面移动单元2和第一移动机构101对穿刺针架4的位置补偿功能。此外,当穿刺针架4需要进行竖直方向的位置调整时,通过调整第一移动机构101即可。
56.值得一说的是,在实际设置时也可先将第一移动机构101设置在平面移动单元2上,之后将第一角度调节机构102设置在第一移动机构101上,在将第二角度调节机构103设置在第一角度调节机构102上,即第一移动机构101在进行竖直方向的位置补偿时会同时带动第一角度调节机构102和第二角度调节机构103同时上下移动。
57.此外,也可将第二角度调节机构103与平面移动单元2先连接,再将第一移动机构101或第一角度调节机构102与第二角度调节机构103连接,同样可以达到相同的目的。
58.图3为图2中a处的放大结构示意图。
59.本发明一些实施例中,参考图3,第一角度调节机构102包括:第一滑动组件1021、第二滑动组件1022和第一驱动机构1023,第一驱动机构1023分别与第一滑动组件1021和第二滑动组件1022连接,第一驱动机构1023用于驱动第一滑动组件1021的滑块和第二滑动组件1022的滑块反向运动。
60.具体的说,在本实施例中,第一驱动机构1023包括:第二固定板10231、第一电机10232和第一齿轮10233,第一滑动组件1021包括:第二导轨10211、第二滑块10212和齿条10213,第二电机303设置在固定板上,第一齿轮10233设置在第二电机303的转动轴上,第二导轨10211固定设置在第二固定板10231上,第二滑块10212滑动设置在第二导轨10211上,齿条10213左右方向设置在第二滑块10212上,且第一齿轮10233与齿条10213相互啮合,第二滑动组件1022与第一滑动组件1021结构相同,前后对称设置在第二固定板10231上,使用时开启第一电机10232即可带动两个齿条10213反向运动,进而达到水平面内的角度调节,第二角度调节机构103与第一角度调节机构102结构相同,即第二角度调节机构103能够调整竖直面内朝向。使用上述结构对穿刺针架4进行调节,结构小、价格便宜、重量轻。
61.此外,需要注意的是,第一固定板1013设置于第一滑动组件1021和第二滑动组件1022,但随着第一驱动机构1023的转动,第一固定板1013在第一滑动组件1021和第二滑动组件1022的两个固定点的间距会发生改变,即第一固定板1013为一端固定一端滑动设置,且第一固定板1013相对于第一滑动组件1021和第二滑动组件1022的两个固定点处需转动设置,即实际设置时需要第一固定板1013一端转动设置在第一滑动组件1021上,另一端滑动和转动设置第二滑动组件1022上。
62.本发明一些实施例中,第一角度调节机构102还包括减速组件1024,减速组件1024设有至少两组,第一驱动机构1023与第一滑动组件1021通过至少一组减速组件1024连接,第一驱动机构1023与第二滑动组件1022通过至少一组减速组件1024连接。
63.具体的说,在本实施例中,减速组件1024包括:固定柱10241和第二齿轮10242,固定柱10241固定设置在第二固定板10231上,第二齿轮10242转动设置在固定柱10241上,第二齿轮10242同时与第一齿轮10233和齿条10213啮合,使用时第一驱动机构1023通过第二齿轮10242间接带动齿条10213运动,能够降低转动单位角度带动齿条10213运动的距离,这样设置更加便于控制。
64.本发明一些实施例中,参考图4和图5,还包括第二移动机构5,第二移动机构5设置于平面移动单元2,且第二移动机构5与超声成像单元3不平行设置,角度调节单元1设置于第二移动机构5,第二移动机构5用于调整角度调节单元1的位置。
65.具体的说,在本实施例中,第二移动机构5包括:第二丝杆电机501和滑动板502,第二丝杆电机501沿左右方向设置在平面移动单元2上,滑动板502设置在第二丝杆电机501的丝杆上,角度调节单元1固定设置在滑动板502上,这样设置便于调整角度调节单元1相比于超声成像单元3的距离,同时也便于在需要对穿刺针架4进行调整时通过第二移动机构5进行位置补偿,更加便于实际使用。
66.本发明一些实施例中,参考图4和图5,平面移动单元2包括:第三移动机构201、第
四移动机构202和第五移动机构203,第四移动机构202和第五移动机构203均设置在第三移动机构201上,第四移动机构202和第三移动机构201相互垂直设置,第五移动机构203与第四移动机构202平行设置,角度调节单元1设置在第四移动机构202上,超声成像单元3设置在第五移动机构203上。
67.具体的说,在本实施例中,第三移动机构201、第四移动机构202和第五移动机构203与第一移动机构101结构相同,第三移动机构201左右方向设置,第四移动机构202和第五移动机构203前后方向设置,使用时可通过第三移动机构201带动角度调节单元1和超声成像单元3的在左右方向上的位置,通过第四移动机构202带动角度调节单元1在前后方向上的位置,通过第五移动机构203带动超声成像单元3在前后方向上的位置,便于进行位置调节。
68.图7为图1中超声成像单元和第五移动机构的结构示意图。
69.本发明一些实施例中,参考图7,超声成像单元3包括:超声探头301、成像装置(图中未示)和转动调节装置302,转动调节装置302设置于平面移动单元2,超声探头301设置于转动调节装置302,转动调节装置302用于带动超声探头301转动,超声探头301与成像装置电连接,成像装置用于将超声探头301检测到的信息转换成图像信息并显示。
70.具体的说,在本实施例中,超声探头301是指在能够发射并接收超声波的探头,成像装置(图中未示)与超声探头301电连接,成像装置能够将超声探头301接收的超声波转化成图像信息并进行显示,超声探头301和成像装置可市面购买,转动调节装置302包括:第二电机303、支撑板304、固定座305、第二电机303、第三齿轮306和第四齿轮(图中未示),支撑板304固定设置在第五移动机构203上,固定座305转动设置在支撑板304上,超声探头301和第三齿轮306均设置在固定座305上,第二电机303固定设置在支撑板304上,第四齿轮设置在第二电机303的转动轴上,且第三齿轮306与第四齿轮(图中未示)相互啮合,使用时开启第二电机303可带动超声探头301进行旋转,便于实际使用时对不同方位进行检测。
71.此外,超声成像单元3还包括超声鞘307,超声鞘307设置于平面移动单元2,超声鞘307位于超声探头301的前端,且超声鞘307靠近超声探头301的一侧中空设置,超声探头301能够伸入到超声鞘307内。使用时,将超声鞘307移动到待检测部位,之后在第五移动机构203的带动下将超声探头301伸入到超声鞘307内,并使得超声探头301在超声鞘307内转动和前后移动,一方面能够对检测部位进行保护,另一方面能够对超声探头进行保护。
72.本发明一些实施例中,参考图4,穿刺针架4包括:保持架401和至少两组加持组件402,至少两组加持组件402设置于角度调节单元1,保持架401的一端固定设置于一组加持组件402,保持架401的另一端活动设置于至少一组加持组件402。
73.具体的说,在本实施例中,加持组件402包括:夹具403和固定轴404,固定轴404固定设置在第二角度调节机构103的两个滑动组件上,夹具403转动设置在固定轴404上,保持架401沿轴向中空贯穿设置,保持架401的前端固定设置在前侧的夹具403上,保持架401的后端滑动设置在后侧的夹具403上,这样设置便于适应第二角度调节机构103进行角度调节时两个固定柱10241之间的间距变化和两个固定点的方向变化。
74.图8为本发明第二种实施例中角度调节单元和穿刺针架的结构示意图。
75.本发明一些实施例中,参考图1和图8,图8和图1的区别在于,第一角度调节机构102和第二角度调节机构103的结构不同,第一角度调节机构102包括:弧形导向组件1025和
第二驱动机构1026,弧形导向组件1025设置于平面移动单元2,弧形导向组件1025与第二驱动机构1026连接,第二驱动机构1026用于带动弧形导向组件1025的滑块转动。
76.具体的说,在本实施例中,弧形导向组件1025包括:弧形齿条10251、弧形导轨10254、第三滑块10252和第三固定板10253,第二驱动机构1026包括:第三电机(图中未示)和第五齿轮10261,第三固定板10253固定设置在第四移动机构202的滑块上,弧形导轨10254固定设置在第三固定板10253上,第三滑块10252滑动设置在弧形导轨10254上,第三电机(图中未示)固定设置在第三固定板10253上,第五齿轮10261固定设置在第三电机的转动轴上,弧形齿条10251固定设置在第三滑块10252上,且弧形齿条10251与第五齿轮10261啮合设置,本实施例中的第二角度调节机构103与图1中的第一角度调节机构102结构相同。,第一移动机构101设置在第三滑块10252上,使用时开启第三电机带动弧形齿条10251转动即可调整穿刺针架4在水平面内的朝向。
77.图9为本发明第三种实施例中穿刺手术机器人的控制方法示意图。
78.本发明的一些实施例中,参考图9,穿刺手术机器人的控制方法,包括以下步骤:
79.s1:通过平面移动单元驱动超声成像单元移动,使超声成像单元移动至检测位置;
80.s2:通过超声成像单元获取检测对象图像信息;
81.s3:通过平面移动单元驱动角度调节单元移动,通过角度调节单元调整穿刺针架的方向,使穿刺针架移动至检测位置并朝向指定方向;
82.s4:通过穿刺针架推动穿刺针进行穿刺。
83.具体的说,在本实施例中,平面移动单元水平设置,角度调节单元和超声成像单元设置在平面移动单元上,平面移动单元可以带动角度调节单元和超声成像单元左右前后移动,穿刺针架设置在角度调节单元上,角度调节单元能够调整穿刺针架在空间内的朝向,并结合平面移动单元使穿刺针架朝向空间的一固定不动点,之后通过穿刺针架进行穿刺,穿刺针通过该不动点刺入检测对象提取分泌物,之后重新调整穿刺针架的位置和方向,使穿刺针架朝向上述固定不动点后再次进行穿刺,这样使穿刺时只存在一个伤口。且根据不同的情况、要求,可通过平面移动单元和角度调节单元调整每次诊断时空间的固定不动点的位置。
84.虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1