手术机器人末端执行机构及使用其的手术机器人的制作方法
1.本发明涉及医疗器械技术领域,具体而言,涉及一种手术机器人末端执行机构及使用其的手术机器人。
背景技术:
2.在机器人辅助微创外科手术过程中,通常通过套管建立专用通道,医生借助细长的微创手术器械进入该专用通道内,从而在人体腹腔内实施手术操作任务。微创手术器械中,例如电凝钩是必不可少且使用较为频繁的一种手术器械。电凝钩一般用于切割、剥离人体组织,并且在遇到毛细血管时还能起到电凝止血的作用,有时也会使用电凝钩挑起比较大的血管或正常组织,为后续手术操作创造空间。
3.公开号为cn112043394a的中国发明专利申请中,公开了一种最常见的用于微创手术机器人的电凝钩结构,此种结构最早见于直观外科手术操作公司的达芬奇手术机器人,其包括第一支承架、第二支承架以及执行部,第一支承架和第二支承架大致呈u型结构,第二支承架和执行部上分别以相正交的方向固定钢丝绳,从而实现执行部的两自由度的运动。电钩固定在执行部上,通过与其连接的电缆为电钩提供电凝所需的电能量。
4.经实际使用发现,上述电凝钩结构存在以下技术缺陷:1、用于容纳电缆的绝缘件、第二支承架上固定钢丝绳或的部分、以及第一绝缘件上穿过电缆的通道,此类封闭式的结构或狭长通道装配难度大,且容易藏污纳垢;由于手术机器人的手术器械一般可以使用十次左右,每次使用后都需对电凝钩进行杀菌消毒,而这种结构就会导致消毒效果不理想,或者成本代价太大,特别是对于埋藏在封闭结构内的一些微小的固体物质,常用的消毒水浸泡/冲洗、高温蒸汽等消毒方式均无法去除;2、驱动第一绝缘件转动的钢丝绳偏置设置在第一绝缘件的一侧,如此会导致第一绝缘件受力不均,影响可靠性,而钢丝绳上的力是比较大的,这对一般为塑料材质的绝缘件来说影响更大;3、在第一支承架上间隔设置有两根销和,并分别安装导轮,第一支承架的u型耳部长度会很长,结构不紧凑,且会影响结构强度;4、两侧的钢丝绳和(实质为一根钢丝绳)经过两侧的导轮时方向是相同的,这样在电钩做前后偏转运动时,两侧钢丝绳的同时伸长或缩短的,钢丝绳长度不能保持恒定,因此该方案需要在传动盒部分设计复杂的机械解耦结构,会导致传动盒结构复杂且运动可靠性低。
5.综上,对于用于微创手术机器人的电凝钩结构来说,其总体性能还有待进一步优化。
技术实现要素:
6.本发明的第一目的是提供一种手术机器人末端执行机构,以解决优化手术机器人末端执行机构整体的使用性能的技术问题。
7.本发明的第二目的是提供一种手术机器人,以解决优化手术机器人的末端执行机构整体的使用性能的技术问题。
8.本发明的手术机器人末端执行机构是这样实现的:一种手术机器人末端执行机构,包括:末端执行器;第一支承架,其用于支承所述末端执行器;且所述末端执行器适于通过绕设在该末端执行器上的第一钢丝绳来相对于第一支承架转动以实现俯仰运动; 在所述末端执行器上设有适于卡限第一钢丝绳的第一中空导套;第二支承架,其用于支承所述第一支承架;且所述第一支承架适于通过绕设在该第一支承架上的第二钢丝绳来相对于第二支承架转动以实现偏航运动;在所述第一支承架上设有适于卡限第二钢丝绳的第二中空导套。
9.在本发明可选的实施例中,在所述末端执行器对应其俯仰运动的外壁面上还设有用于引导第一钢丝绳的第一导向槽。
10.在本发明可选的实施例中,所述末端执行器上设有敞开的用于嵌设第一中空导套的容纳槽;所述容纳槽与第一导向槽连通。
11.在本发明可选的实施例中,在所述第一支承架的一对相对的外侧壁上分别设有用于引导第一钢丝绳的导向轮;一对导向轮分别设于第一支承架上对应末端执行器的俯仰运动的外壁面上;分别位于第一支承架的两个外侧壁上的导向轮错位式分布以使两个导向轮分别与第一钢丝绳配合的端面相反;以及在所述第二支承架的一对相对的侧壁上分别设有用于引导第一钢丝绳的导轮;一对导轮分别设于第二支承架上对应末端执行器的俯仰运动的壁面上;两个导轮分别与第一钢丝绳配合的端面相反。
12.在本发明可选的实施例中,所述第一导向槽设于末端执行器的中部以使第一钢丝绳作用于末端执行器的中部在本发明可选的实施例中,所述末端执行器通过预制的安装孔还配接有末端执行部;在所述末端执行器对应其俯仰运动的外壁面上还设有用于引导导线的线槽;以及所述线槽与安装孔贯通以使导线可经线槽的引导后伸入至安装孔中与末端执行部连接。
13.在本发明可选的实施例中,所述末端执行部采用电凝钩;以及所述电凝钩包括一体相连的钩头和钩身主体,以及与所述钩身主体相连的用于与安装孔配接的连接段。
14.在本发明可选的实施例中,在所述第一支承架对应其偏转运动的壁面上还设有用于引导第二钢丝绳的第二导向槽;以及所述第二中空导套嵌设第一支承架上且与第二导向槽连通。
15.在本发明可选的实施例中,所述第一支承架上设有敞开的用于嵌设第二中空导套的容纳部;
所述容纳部与第一导向槽连通。
16.本发明的手术机器人是这样实现的:一种手术机器人,包括:所述手术机器人末端执行机构。
17.相对于现有技术,本发明实施例具有以下有益效果:本发明的手术机器人末端执行机构及使用其的手术机器人,对于驱动末端执行器做俯仰运动的第一钢丝绳来说,其绕设在末端执行器的外壁面上的第一导向槽,且穿过设于末端执行器上的第一中空导套来进行限位;其中的第一导向槽和用来装配第一中空导套的容纳槽均是开放式结构,这种结构不仅装配方便,而且便于杀菌消毒;再者对于驱动第一支承架做偏航运动的第二钢丝绳来说,其绕设在第一支承架上的第二导向槽,且穿过设于第一支承架上的第二中空导套来进行限位;其中的第二导向槽和用来装配第二中空导套的容纳部也都是开放式结构;这种结构不仅装配方便,而且便于杀菌消毒。
18.此外,分别位于第一支承架的两个外侧壁上的导向轮错位式分布以使两个导向轮分别与第一钢丝绳配合的端面相反;再配合第二支架上的两个导轮分别与第一钢丝绳配合的端面相反的结构,使得这种结构下使用的第一钢丝绳的长度恒定,无需复杂的机械解耦机构,从而使得本发明的末端执行机构的结构简化,操作原理也更简单。
附图说明
19.下面结合附图和实施例对本发明进一步说明。
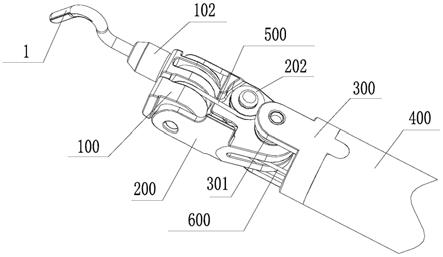
20.图1示出了本发明实施例1提供的手术机器人末端执行机构的第一视角结构示意图;图2示出了本发明实施例1提供的手术机器人末端执行机构的第二视角结构示意图;图3示出了本发明实施例1提供的手术机器人末端执行机构的分解结构示意图;图4示出了本发明实施例1提供的手术机器人末端执行机构的末端执行器的结构示意图;图5示出了本发明实施例1提供的手术机器人末端执行机构的第一支承架的第一视角结构示意图;图6示出了本发明实施例1提供的手术机器人末端执行机构的第一支承架的第二视角结构示意图;图7示出了本发明实施例1提供的手术机器人末端执行机构的第一支承架的容纳腔的结构示意图;图8示出了本发明实施例1提供的手术机器人末端执行机构的第一支承架的剖视结构示意图;图9示出了本发明实施例1提供的手术机器人末端执行机构的第二支承架的结构示意图;图10示出了本发明实施例2提供的手术机器人末端执行机构的电凝钩在一种可选实施情况下的结构示意图;图11示出了对应图10的手术机器人末端执行机构的电凝钩的另一个视角下的结构示意图;
图12示出了对应图10的手术机器人末端执行机构的电凝钩的再一个视角下的结构示意图;图13示图12的a部放大示意图;图14示出了本发明实施例2提供的手术机器人末端执行机构的电凝钩在一种可选实施情况下的平末端的尺寸示意图;图15示出了本发明实施例2提供的手术机器人末端执行机构的电凝钩在又一种可选实施情况下的结构示意图;图16示出了对应图15的手术机器人末端执行机构的电凝钩的另一个视角下的结构示意图;图17示出了对应图15的手术机器人末端执行机构的电凝钩的再一个视角下的结构示意图;图18示图17的b部放大示意图。
21.图中:末端执行器100、第一支承架200、第二支承架300、长轴400、第一钢丝绳500、第二钢丝绳600、导线700、第一中空导套101、第二中空导套201、外套层102、导向轮202、导轮301、转轴103、轴203、第一导向槽104、容纳槽105、第二导向槽204、容纳部205、销轴206、固定销107、安装孔108、固定销孔109、线槽110、支架孔210、安装槽211、支架212、基体213、导线避让部214、导线穿过部215、适配孔303、直杆段1、弧形弯曲段2、平末端3、弧形头5、第二削去部分6、弯曲过渡段7、连接段8、连接孔9、锁紧孔10、弧形过渡部11。
具体实施方式
22.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
23.实施例1:请参阅图1至图9所示,本实施例提供了一种手术机器人末端执行机构,包括:配合使用的末端执行器100、第一支承架200和第二支承架300。其中的第一支承架200,其用于支承末端执行器100;且末端执行器100适于通过绕设在该末端执行器100上的第一钢丝绳500来相对于第一支承架200转动以实现俯仰运动;在末端执行器100上设有适于第一钢丝绳500穿过的第一中空导套101;第二支承架300,其用于支承第一支承架200;且第一支承架适于通过绕设在该第一支承架200上的第二钢丝绳600来相对于第二支承架300转动以实现偏航运动;在第一支承架200上设有适于第二钢丝绳600穿过的第二中空导套201。
24.需要加以说明的是,本发明中定义的“俯仰”和“偏航”对应的是结合手术机器人在具体使用过程中的操作视角。
25.接下来来说末端执行器100:首先是,末端执行器100是通过一体或者是装配成型在末端执行器100上的转轴103来实现与第一支承架200的转动配合的,对应的在第一支承架200上开设有用于与转轴103配合的支架孔210;对于此处的转轴103与支架孔210之间可以是直接的摩擦配合;通过对于支架孔210的内壁和转轴103的外壁进行光滑处理来降低摩擦阻力即可满足本实施例的使用需求。
26.其次是,对于第一钢丝绳500与末端执行器100的配合来说,在末端执行器100对应
其俯仰运动的外壁面上还设有用于引导第一钢丝绳500的第一导向槽104;此处指的外壁面具体对应的是末端执行器100上人们肉眼可以直接观察到的壁面,也即开放式呈现在人们视线范围内的结构,这种结构上开设第一导向槽104,一方面可以便于装配,另一方面也便于清洗消毒,不会存在藏污纳垢的清洗盲角。
27.在上述结构的基础上,末端执行器100上设有敞开的用于嵌设第一中空导套的容纳槽105,该容纳槽105与第一导向槽104是连通的。具体的,本实施例的第一中空导套101具有便于第一钢丝绳500穿过的空腔,在将第一中空导套101与第一钢丝绳500装配后,再将第一中空导套101嵌设至容纳槽105中,此处可选采用例如但不限于过盈配合的方式使得第一中空导套101与末端执行器100牢固配接。本实施例设计的容纳槽105为敞开的结构,此处的敞开具体指的是在将第一中空导套101嵌设到容纳槽105中后,该第一中空导向套101的外侧壁面还是处于外漏的状态,从而便于清洗和消毒,不会存在藏污纳垢的清洗盲角。
28.对此,可选的一种实施情况下,本实施例采用的第一中空导套101在装配至容纳槽105之前的截面为u形或者圆形。当然此处的第一中空导套101也可以是其它形状或者是异形结构,只要能使得该第一中空导套101具有的空腔与第一导向槽104连通即可满足本实施例的使用需求。
29.再者是,本实施例的末端执行器100通过预制的安装孔108还配接有末端执行部。末端执行部在使用的过程中需要外接导线700以实现电源的供给或者其它功能的控制,对此,在末端执行器100对应其俯仰运动的外壁面上还设有用于引导导线700的线槽110;以及线槽110与安装孔108贯通以使导线700可经线槽110的引导后伸入至安装孔108中与末端执行部连接。此处同样的,将线槽110开设在末端执行器100的外壁面上,使得线槽110呈现为开放式结构,便于装配且不会存在藏污纳垢的清洗盲角。
30.再者结合附图以一种具体可选的实施情况来说,本实施例中的安装孔108设于一中空的圆柱体结构内,还可对该圆柱体结构配置一外套层102,圆柱体结构的侧面开设有两个安装固定销孔109,用于插入固定销107从而固定住末端执行部。可以理解的是,本实施例中,转轴103的中心线和安装孔108的中心线正交构成一个平面,而末端执行器100沿着该平面是一个左右对称的结构。
31.关于本实施例的末端执行器100,还需要加以说明的是,对于开设在末端执行器100上的第一导向槽104来说,第一导向槽104设置在末端执行器100上的中部位置,这样使得末端执行器100受到的来自第一钢丝绳500的牵拉力更加均匀,受力均匀的前提下使得整体的末端执行器100的俯仰运动更加稳定,如此对于装配在末端执行器100上的末端执行部来说,其操作更加精确灵敏。
32.接下来说第一支承架200:首先是,第一支承架200是通过一体或者是装配成型在第一支承架200上的轴203来实现与第二支承架300的转动配合的,对应的在第二支承架300上开设有用于与轴203配合的适配孔303;对于此处的轴203与适配孔303之间可以是直接的摩擦配合;通过对于适配孔303的内壁和轴203的外壁进行光滑处理来降低摩擦阻力即可满足本实施例的使用需求。
33.此处还需要加以说明的是,对于此处配合第二支承架300的轴203来说,轴203可以是一个整体轴203来贯穿第一支承架200,这样的结构使得整体的末端执行机构的结构紧凑且强度高。
34.其次是,由于对末端执行器100实现驱动作用力的第一钢丝绳500是穿过第二支承架300再经第一支承架200后最终延伸至末端执行器100上的,因此出于对第一钢丝绳500使用过程中的引导过程的考虑,在第一支承架200的一对相对的外侧壁上分别设有用于引导第一钢丝绳500的导向轮202;一对导向轮202分别设于第一支承架200上对应末端执行器100的俯仰运动的外壁面上;此处同样的,将导向轮202设置在第一支承架200的外壁面上,使得导向轮202呈现为开放式结构,便于装配且不会存在藏污纳垢的清洗盲角。
35.此外,在第二支承架300的一对相对的侧壁上分别设有用于引导第一钢丝绳500的导轮301;一对导轮301分别设于第二支承架300上对应末端执行器100的俯仰运动的壁面上;两个导轮301分别与第一钢丝绳500配合的端面相反。对于此处的导轮301来说,其可以直接套设在第一支承架200的轴203上,如此即可省去再在第二支承架300的侧壁上设置另外的对于导轮301的支撑,使得整体的末端执行机构的结构简单化。并且对于此处的两个导轮301来说,与第一钢丝绳500配合的接触面整体也是开放可视的,同样便于清洗消毒。
36.在上述结构的基础上,还需要加以说明的是,分别位于第二支承架300的两个侧壁上的两个导轮301与第一钢丝绳500配合的端面相反。结合附图2来具体说明,当前视角下的导轮301,第一钢丝绳500经过时是在该导轮301的右边(即远离末端执行部的一侧),在视角的背面即目前视角不可见的端面,也有一个导轮301,第一钢丝绳500经过时却是在导轮301左边(即靠近末端执行部的一侧)。如此,在第一支承架200转动时,第一钢丝绳500的一侧长度增加,另一侧长度同等减少,也就是说整体的第一钢丝绳500的长度恒定,且末端执行器100的角度可保持不动,无需设计复杂的机械解耦机构,如此即简化了整体的手术机器人末端执行机构的结构,简化的结构一方面降低了配件成本,和装配成本,另一方面也便于清洗消毒,可以提高消毒的彻底性。
37.此处还需要加以说明的是,结合本实施例将第一导向槽104开设在末端执行器100上的中部位置的结构来说,第一钢丝绳500在对末端执行器100施加牵拉力的时候,需要经过第一支承架200上的导向轮202和第二支承架300上的导轮301的传导,由于本实施例的手术机器人末端执行机构是应用在微创手术中的,对于器械的操作的精度和灵敏度要求较高,结合本实施例来说,对于第一钢丝绳500的驱动力到对末端执行器100产生的作用力之间的传递系数会直接影响到最终的末端执行器100的使用灵敏度和精度,因此,有必要降低导向轮202和导轮301对于第一钢丝绳500传导过程中的摩擦阻力,对此,本实施例做了如下设计:即对于设于第一支承架200上的导向轮202和设于第二支承架300上的导轮301来说,位于同一侧的导向轮202和导轮301之间呈偏置分布结构,且导向轮202的内侧边缘对应导轮301的中部位置,由实际试用验证这样的结构下不仅可以使得第一钢丝绳500作用于末端执行机构的中部位置,使得整体的末端执行结构受力均衡,且可以使得第一钢丝绳500在经过位于同一侧的导向轮202和导轮301时的作用力的传导效果达到较为理想的状态,使得在这种结构的第一钢丝绳500作用下的末端执行器100使用过程中的精度和灵敏度都能达到较为理想的状态,满足对于微创手术环境下的使用的要求。
38.再者是,对于第二钢丝绳600与第一支承架200的配合来说,在第一支承架200对应其偏航运动的壁面上还设有用于引导第二钢丝绳600的第二导向槽204;此处的壁面具体对应的是第一支承架200上人们肉眼可以直接观察到的壁面,也即开放式呈现在人们视线范围内的结构,这种结构上开设第二导向槽204,一方面可以便于装配,另一方面也便于清洗
消毒,不会存在藏污纳垢的清洗盲角。
39.在上述结构的基础上,第一支承架200上设有敞开的用于嵌设第二中空导套201的容纳部205,该容纳部205与第二导向槽204是连通的。具体的,本实施例的第二中空导套201具有便于第二钢丝绳600穿过的空腔,在将第二中空导套201与第二钢丝绳600装配后,再将第二中空导套201嵌设至容纳部205中,此处可选采用例如但不限于过盈配合的方式使得第二中空导套201与第一支承架200牢固配接。本实施例设计的容纳部205为敞开的结构,此处的敞开具体指的是在将第二中空导套201嵌设到容纳部205中后,该第二中空导套201的外侧壁面还是处于外漏的状态,从而便于清洗和消毒,不会存在藏污纳垢的清洗盲角。
40.对此,可选的一种实施情况下,本实施例采用的第二中空导套201在装配至容纳部205之前的截面为u形或者圆形。当然此处的第二中空导套201也可以是其它形状或者是异形结构,只要能使得该第二中空导套201具有的空腔与第二导向槽204连通即可满足本实施例的使用需求。
41.再者结合附图以一种具体可选的实施情况来说,本实施例中的第一支承架200可以采用塑料材质一体加工成型(具体为peek塑料,一体成型而成),包括设有第二导向槽204的基体213,以及位于基体213两侧的用于配接转轴103的支架212。基体213上开设有三个轴孔,其中两个轴孔配合销轴206用来装配导向轮202,第三个轴孔则是用来装配实现第一支承架200相对于第二支承架300做偏航运动的轴203。支架212上安装有支架孔210,用于配接末端执行器100的转轴103,支架孔210上方内侧位置设有倾斜的安装槽211,从而便于将转轴103卡入支架孔210中;支架212和基体213相连的位置,在一侧设有用于供导线700穿过的导线穿过部215,在另一侧设有导线避让部214,用于防止末端执行器100转动时导线700与第一支承架200干涉。在本实施例中,三个销轴孔208的中心在基体213大面上的投影并不在一条直线上,而是构成一个等腰三角形;具体的,其中两个销轴孔208用来配接导向轮202,第三个销轴孔208用来装配轴203。换句话说,整个第一支承架200是一个中心对称结构,因此,更加有利于装配。
42.实施例2:请参阅图10至图18所示,在实施例1的手术机器人末端执行机构的基础上,本实施例涉及的手术机器人末端执行机构的末端执行部采用电凝钩;以及电凝钩包括一体相连的钩头和钩身主体,以及与钩身主体相连的用于与安装孔108配接的连接段8。
43.本实施例采用的电凝钩包括:一体相连的钩头和钩身主体;其中钩头包括一体成型的直杆段1和弧形弯曲段2;直杆段1长度为l,2.5mm≤l≤4.5mm,本实施例中优选3.5mm。
44.此处需要加以说明的是,对于直杆段1来说结合实际使用的需求来说,可以采用圆柱状或者近似圆柱状的结构体,这样结构不仅利于加工,而且在使用过程中可以降低对于人体组织的非预期的损伤。
45.此外,对于此处的电凝钩也可以将弧形弯曲段2设计为其它形状来配合不同的手术器械上的头部结构。具体的,本实施例对于弧形弯曲段2的结构不做改进,因此对于这部分结构的具体结构不做绝对限定。
46.在上述结构的基础上,本实施例还在钩头的侧壁上采用例如但不限于车削加工的方式来成型一对平端部3,使得直杆段1在具体使用过程中朝向人体组织的端面成型处刃口结构。一对平端部3分别位于刃口结构的两侧。且此处的平端部3在加工过程中是由直杆段1
向弧形弯曲段2一侧延伸成型。也就是说此处的平端部3可以是只成型在直杆段1的侧壁上,也可以是同时成型在直杆段1和弧形弯曲段2的侧壁上,对此本实施例不做绝对限定。
47.此处需要加以说明的是,对于成型在钩头上的一对平端部3来说,可以是呈对称分布的结构,也可以是非对称的结构,当然考虑到加工的便捷性,以及成型后的产品结构的对称性,以及使用过程中性能的优化性,本实施例结合附图以对称设置的一对平端部3来举例。
48.关于本实施例的刃口结构在具体的使用过程中主要用于对组织进行剥离,因此在剥离组织的过程中还需要避免由于刃口结构过于锋利而产生的对于组织产生非预期的损伤的情况,故而本实施例设计的刃口结构朝向人体组织的端面成型为外凸的弧形面,此种外凸的弧形面相比平端面来说,其对应该刃口结构的两侧边沿更加柔和,如此在对人体组织进行剥离的过程中可能对于人体组织产生的损伤也小。
49.此外,还是出于对于降低电凝钩在使用过程中可能造成的对于人体组织的非预期的损伤的考虑,本实施例的直杆段1远离弧形弯曲段2的端部成型为弧形头5;以及弧形头5具有与刃口结构衔接的弧形过渡。在此结构基础上,又一种可选的实施情况下,弧形头5还具有分别与一对是平端部3衔接的弧形过渡。
50.由于本实施例的弧形面是通过在钩头的侧壁加工平端部3来实现的,因此一对平端部3的具体结构会直接影响到成型的弧形面的结构。对此,本实施例举例以下几种可选的平端部3的形状来展开对于弧形面的介绍:第一种情况下,一对平端部3不仅呈对称结构,而且呈平行结构,此时成型的弧形面的径向宽度由直杆段1向弧形弯曲段2方向相同,也就是说对于整体的刃口结构来说,该刃口结构远离弧形弯曲段2和其靠近弧形弯曲段2的结构是相同的,其能够实现的对于组织进行剥离的效果是一致的。
51.第二种情况下,一对平端部3不仅呈对称结构,而且一对平端部3对应刃口结构的长度方向的两个侧边沿呈平行分布状,此时成型的弧形面的径向宽度由直杆段1向弧形弯曲段2方向相同,也就是说对于整体的刃口结构来说,该刃口结构远离弧形弯曲段2和其靠近弧形弯曲段2的结构是相同的,其能够实现的对于组织进行剥离的效果是一致的。
52.第三种情况下,一对平端部3不仅呈对称结构,而且一对所述平端部3由直杆段1向弧形弯曲段2一侧呈渐开状;以及一对平端部3的表面的延伸面在远处相交形成有夹角α;此处5
°
≤α≤10
°
;优选7
°
。此种情况下,弧形面的径向宽度由直杆段1向弧形弯曲段2方向减小。也即是,刃口结构远离弧形弯曲段2的锋利度大于其靠近弧形弯曲段2的锋利度,使得刃口结构远离弧形弯曲段2的部位相比起靠近弧形弯曲段2的部位来说,更适用于对于精细组织的剥离操作。综上,对于这种结构下的刃口结构来说,可以在具体使用过程中根据需要来调整使用刃口结构上的不同部位来对不同精细程度的组织的剥离操作,因此使用过程中的灵活性更强。
53.接下来还是结合附图举例结合参数来进一步对本实施例的刃口结构进行详细说明:第一种实施情况下,对于圆柱状或者近似圆柱状的结构体的直杆段1来说,其外径为r1,0.4mm≤r1≤0.8mm,本实施例中优选0.6mm。r1小于该范围,会使得电凝钩的钩头过细,太锋利,难以满足挑起血管等其他操作的使用需求,且结构强度不够理想;而r1大于该
范围,会使得电凝钩的钩头过粗,难以对组织进行剥离且无法操作精细组织。而由于直杆段1的顶端是类似球形的曲面,因此,削去部分的最大横向尺寸d1形成在靠近顶端的位置,r1≤d1≤1.5*r1,本实施例中优选1.3*r1,如r1选择0.6mm,则d1优选0.78mm。d1小于该范围,会使得刃口结构的刃口过粗,几乎起不到对于组织进行剥离的作用;而d1大于该范围,会使得刃口结构的刃口过于锋利,加工制造困难,且结构强度不够理想。
54.第二种实施情况下,可看作在第一种实施情况下的基础上,在直杆段1的两侧再以一定角度β的两个平面削去一部分形成第二削去部分6。当然,第二削去部分6与弧形弯曲段2采用弧形过渡部11连接。第二削去部分6在顶端面上的投影可看作等腰三角形的两条边,只是底边变为了圆弧形且两条边相交的尖角也变为了圆弧形,两个圆弧形的外径r2相同(r2与第一种实施情况中外径r1的范围相同),但弧长不同。具体的,两条边形成的夹角为β(也即这种实施情况下的一对平端部3分别对应直杆段1远离弧形弯曲段2的端部的两个边沿的延伸线在远处相交形成有夹角β),此处的20
°
≤β≤60
°
,本实施例中优选40
°
。β小于该范围,会使得电凝钩的刃口结构的刃口太锋利,难以满足挑起血管等其他操作的使用需求,且结构强度不够理想;而β大于该范围,会使得刃口结构的刃口过粗,几乎起不到对于组织进行剥离的作用。进一步的,在第二削去部分6与顶端、以及第二削去部分6与直杆段1的侧面交接的位置处均形成有倒圆角。倒圆角后,前述两条边最近距离为d2,形成于直杆段1朝向人体组织的一侧,0.2*r2≤d2≤r2,本实施例中优选0.5*r2,如r2选择0.6mm,则d2优选0.3mm。d2小于该范围,会使得电凝钩的刃口结构的刃口太锋利,难以满足挑起血管等其他操作的使用需求,且结构强度不够理想;d2大于该范围,会使得刃口结构的刃口过粗,几乎起不到对于组织进行剥离的作用。
55.综上,也就是说对于本实施例的电凝钩来说,通过对于钩头侧壁上的一对平端部3的形状以及位置关系的控制来调整成型的刃口结构的具体形状以及尺寸,使其既能满足对于组织进行剥离的作用,又能实现挑起血管的作用。结合附图举例一种可选的情况具体来说,本实施例采用的电凝钩还包括与钩头的弧形弯曲段2远离直杆段1的端部相连的弯曲过渡段7;连接段8与弯曲过渡段7相连;其中,在连接段8上开设有连接孔9,连接孔9的作用是用于插入固定销107,从而固定住电凝钩的钩头,连接段8至少靠近下侧的部分为中空结构,形成锁紧孔10,用于与导线700连接并压紧导线700,从而便于导线700为电凝钩的钩头提供电能量。弯曲过渡段7和弧形弯曲段2的弯曲方向相反,从而形成一个钩状结构。可以理解的是,虽然将电凝钩整体分了多段,但其实是一体成型的导电金属结构。
56.实施例3:在实施例1或者实施例2的手术机器人末端执行机构的基础上,本实施例提供了一种手术机器人,包括:实施例1或者实施例2的手术机器人末端执行机构。需要加以说明的是,对应将实施例1或者实施例2的手术机器人末端执行机构的应用在手术机器人上时,在手术机器人末端执行机构的第二支承架300与手术机器人的其它部件之间通过长轴400结构连接即可,装配便捷高效。
57.以上的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
58.在本发明的描述中,需要理解的是,指示方位或位置关系的术语为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
59.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
60.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
61.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
62.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之上或之下可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征之上、上方和上面包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征之下、下方和下面包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1