一种CT设备动态成像性能测试模体的制作方法
一种ct设备动态成像性能测试模体
技术领域
1.本发明属于医学成像及放射治疗技术领域,特别是涉及一种ct设备动态成像性能测试模体。
背景技术:
2.目前,ct扫描技术以其优异的结构成像性能,广泛应用于放射治疗领域的整个流程中。随着质子。重离子等高效放疗技术的发展,肿瘤靶区的勾画和定位精度要求大大提高。而ct设备在成像过程中,因器官运动造成的动作伪影,严重影响肿瘤靶区的勾画精度和定位精度,针对运动器官的门控和扫描动态扫描技术随之产生,需要一种模体能够测试和验证门控和动态扫描ct设备的成像性能。
技术实现要素:
3.本发明提供了一种ct设备动态成像性能测试模体,解决了以上问题。
4.为解决上述技术问题,本发明是通过以下技术方案实现的:
5.本发明的一种ct设备动态成像性能测试模体,包括模体,该模体由固定模体、运动模体以及驱动部分构成,所述驱动部分驱动运动模体于固定模体内做直线运动。
6.进一步地,所述运动模体由空心管、设置于空心管内的靶标、安装于空心管外前端封头上的连接板构成;所述空心管与固定模体侧面开设的圆孔对应且前后伸缩配合。
7.进一步地,所述驱动部分为连杆机构,由电机控制器控制电机进行驱动,所述电机的驱动轴端中心位置安装有转盘,所述转盘与连接板之间通过连杆转动连接,所述转盘上沿半径方向分布有多个孔,通过将第一销轴插入至不同的孔内实现连杆与转盘的连接,快速改变第一销轴的回转半径,进而改变所述运动模体的运动范围以及曲柄长度,实现运动模体运动行程的改变。
8.进一步地,所述电机控制器采用可编程控制器,控制电机按预定速度曲线旋转,进而带动所述运动模体按照不同的速度曲线运动。
9.进一步地,所述固定模体以及空心管采用有利于x射线穿过的低密度材质制成。
10.进一步地,所述靶标采用中低密度材质制成;
11.进一步地,门控或动态成像时,将空心管内的靶标定位在ct设备的扫描平面内,设置好运动模体的行程和运动曲线,然后启动运动模体,完成相应扫描后,通过测量断层图像中靶标的截面形状或运动行程来评估ct设备的成像精度。
12.本发明相对于现有技术包括有以下有益效果:
13.本发明的模体能够能够测试和验证门控和动态扫描ct设备的成像性能,门控或动态成像时,将模体的靶标定位在扫描平面内,设置好模体的行程和运动曲线,然后启动模体,完成相应扫描后,通过测量断层图像中靶标的截面形状或运动行程来评估ct设备的成像精度,具有结构简单,运动速度、运动行程和运动曲线可任意设置的优点。
14.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
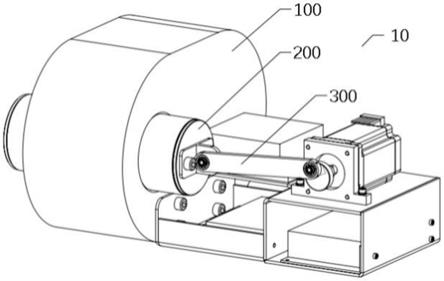
16.图1为本发明一种ct设备动态成像性能测试模体的整体结构示意图;
17.图2为图1中运动模体的结构示意图;
18.图3为图2的横向剖面图;
19.图4为本发明测试模体驱动状态下的结构示意图;
20.图5为图1中转盘的结构及行程切换原理示意图;
21.图6为本发明的测试模体与ct设备相结合进行工作的状态示意图;
22.附图中,各标号所代表的部件列表如下:
23.100-固定模体,200-运动模体,300-驱动部分;201-连接板,202-封头,203-空心管,204-靶标;301-电机控制器,302第一销轴,303-电机,304-电机支架,305-承载支架,306-电源,307-转盘,308-连杆,309-驱动器,310-第二销轴。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
25.在本发明的描述中,需要理解的是,术语“外前端”、“侧面”、“中心位置”、“半径方向”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.请参阅图1-6所示,本发明的一种ct设备动态成像性能测试模体,包括模体10,该模体10由固定模体100、运动模体200以及驱动部分300构成,驱动部分300驱动运动模体200于固定模体100内做直线运动。
27.其中,运动模体200由空心管203、设置于空心管203内的靶标204、安装于空心管203外前端封头202上的连接板201构成;空心管203与固定模体100侧面开设的圆孔对应且前后伸缩配合,做直线运动;本具体实施例中靶标204采用球状,即靶球,靶标204采用中低密度材质制成,本具体实施例中采用聚甲醛;固定模体100以及空心管203采用有利于x射线穿过的低密度材质制成,本具体实施例中采用pmma材质。
28.其中,驱动部分300为连杆机构,由电机控制器301控制电机303进行驱动,电机303的驱动轴端中心位置安装有转盘307,转盘307与连接板201之间通过连杆308转动连接,转盘上沿半径方向分布有多个孔,本具体实施例中采用为五个孔,通过将第一销轴302插入至不同的孔内实现连杆308与转盘307的连接,快速改变第一销轴302的回转半径,进而改变运动模体200的运动范围以及曲柄长度,实现运动模体200运动行程的改变;连杆308的另一端通过第二销轴310与连接板201相连实现固定。
29.其中,转盘307和电机303的轴固定连接,转盘307和连杆308通过销轴302转动连接,连杆308和运动模体200的连接板201通过第二销轴310转动连接。
30.如图5所示,转盘307展示了一种改变曲柄长度的实施例;转盘307上设计有a,b,c,d,e五个安装孔,第一销轴302可以插入这五个孔中;当连杆308通过第一销轴302和转盘307连接时,销轴插入不同的孔中,即可旋转对应的曲柄长度,进而改变运动模体200的行程。上述改变曲柄长度的实施例,是众多实施例中的一种,而不是全部。所有可以改变曲柄长度的实施例,均在此申请的保护范围内。
31.其中,电机控制器301采用可编程控制器,控制电机303按预定速度曲线旋转,进而带动所述运动模体200按照不同的速度曲线运动;电机303安装于承载支架305上,承载支架305内安装有供电用的电源306,承载支架305上通过电机支架304对电机303进行固定安装;承载支架305的下部还固定安装有与电源306相连的驱动器,以及与电机303相连的电机控制器301。
32.其中,所述驱动部分300通过改变连杆在转盘上的位置,可以快速改变所述运动模体的行程。
33.如图6所示,门控或动态成像时,将运动模体200的靶标204定位在ct涉笔的扫描平面内,设置好运动模体200的行程和运动曲线,然后启动运动模体,完成相应扫描后,通过测量断层图像中靶标204的截面形状或运动行程来评估ct设备的成像精度。
34.动态成像质量(横截面、冠状面、矢状面图像),根据图像中的靶标轮廓和对应的靶标实际截面轮廓的相似度来确认。例如:球形靶标截面理论上为圆形,重建的截面图像靶标轮廓越接近圆形(相似度高),重建质量越好,越远离圆形(相似度低),重建质量越差。
35.ct扫描设备的轴向动态定位精度,根据动态图像中靶标中心在不同期相时的轴向位置和模体中靶标的实际位置的偏差来评估,偏差越小,动态定位精度越高,偏差越大,动态定位精度越差。
36.有益效果:
37.本发明的模体能够能够测试和验证门控和动态扫描ct设备的成像性能,门控或动态成像时,将模体的靶标定位在扫描平面内,设置好模体的行程和运动曲线,然后启动模体,完成相应扫描后,通过测量断层图像中靶标的截面形状或运动行程来评估ct设备的成像精度,具有结构简单,运动速度、运动行程和运动曲线可任意设置的优点。
38.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1