一种新型爬楼履带椅的制作方法
1.本发明涉及爬楼椅技术领域,具体而言,涉及一种新型爬楼履带椅。
背景技术:
2.随着中国人口的老龄化进程加快,我国老年人的数量急剧上升,据报导,我国现有60岁以上的老年人口数量已达1.6亿,他们年龄大、体质弱、疾病多,是个弱势群体。对他们来说,行走都是一件非常困难的事情,更别说爬楼梯。如今人们生活条件的改善,住宅楼的楼层的高度大大增加,大部分的城区住宅楼都是六、七层的楼房,由于都没有电梯,上楼对老、弱、病、残疾人员来说是个巨大行动阻碍,老年人在行走时可采用轮椅作为辅助代步工具,但若上楼梯时需要一个人搀扶或背上楼梯,且还得带上轮椅,这需要耗费大量的体力,爬楼助行辅助工具是十分需要的。
3.因此出现电动爬楼椅,对行动不便的人员爬楼带来较大的便利,但现在的爬楼梯在使用时,稳定性差,与楼梯的接触面较小,在进行爬楼时,容易出现打滑现象,安全性能较低,且在平地上行走时,不便于进行折叠,占用空间较大,不方便使用。
技术实现要素:
4.本发明的目的在于提供一种新型爬楼履带椅,其能够调整乘坐本轮椅的使用人员与楼梯之间的角度变化,避免使用人员产生恐惧心理。
5.本发明的实施例是这样实现的:
6.本技术实施例提供一种新型爬楼履带椅,包括行走机构和座椅,座椅安装于行走机构上,行走机构之间设有用于调整座椅与行走机构相对位置的调位组件。
7.在本发明的一些实施例中,行走机构包括承载架,承载架上安装有两组成对设置的驱动轮,承载架上套设有与驱动轮适配的履带,承载架上设有驱动驱动轮运动的驱动电机。
8.在本发明的一些实施例中,调位组件包括安装于承载架上的承重减速机和调节电机,承重减速机的赎输出端上设有与座椅连接的承重杆,调节电机的输出端与承重减速机的输入端传动连接。
9.在本发明的一些实施例中,调位组件包括铰接于承载架上的承重件,承重件与座椅连接,承载架的侧壁上安装有驱动件,驱动件的输出端设有拉杆,拉杆与座椅的靠背连接。
10.在本发明的一些实施例中,其特征在于,座椅上成对设置有脚踏板。
11.在本发明的一些实施例中,承载架内设有多组蓄电池,驱动电机和驱动件均与蓄电池连接。
12.在本发明的一些实施例中,座椅的上设有用于束缚人体的束缚组件。
13.在本发明的一些实施例中,还包括控制模块,驱动电机、驱动件和蓄电池均与控制模块连接;控制模块用于控制驱动电机、驱动件和蓄电池运转。
14.在本发明的一些实施例中,座椅上设有与控制模块连接的控制面板。
15.在本发明的一些实施例中,承载架的侧壁上设有多个与履带适配的负重轮,且负重轮置于履带相对的侧壁之间。
16.相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
17.本技术实施例提供一种新型爬楼履带椅,包括行走机构和座椅,座椅安装于行走机构上,行走机构之间设有用于调整座椅与行走机构相对位置的调位组件。本技术方案的主要目的是解决现有技术中,设置的履带椅在楼梯上爬行时,人体随行走椅一起呈一定斜度矗立于楼梯上,容易在年老或行走不便的使用人员使用本装置时,造成使用者的心里出现严重的恐惧感,且若人体随行走椅一起呈一定斜度矗立于楼梯上时,人体的中心始终向后,容易导致行人连带履带椅一起在楼梯上滑动,造成使用人员从楼梯上跌落,对使用人员造成严重的伤害;为了避免上述情况的发生,本技术方案通过在行走机构之间设有用于调整座椅与行走机构相对位置的调位组件,设置的调位组件用于保证行走机构倾斜与楼梯上时,设置的调位组件将控制座椅运动,继而改变座椅与楼梯之间的倾仰关系,保证座椅与楼梯之间始终保持水平,继而将乘坐在本履带椅上的平稳的托运至相邻两个楼梯之间较为平稳的位置上;且设置的座椅能为使用本装置的使用人员提供较为舒适的使用环境,并且设置的行走机构能带动本装置平稳的行走在楼宇内的楼梯上,为行动不便和年老体衰的使用者提供便利。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
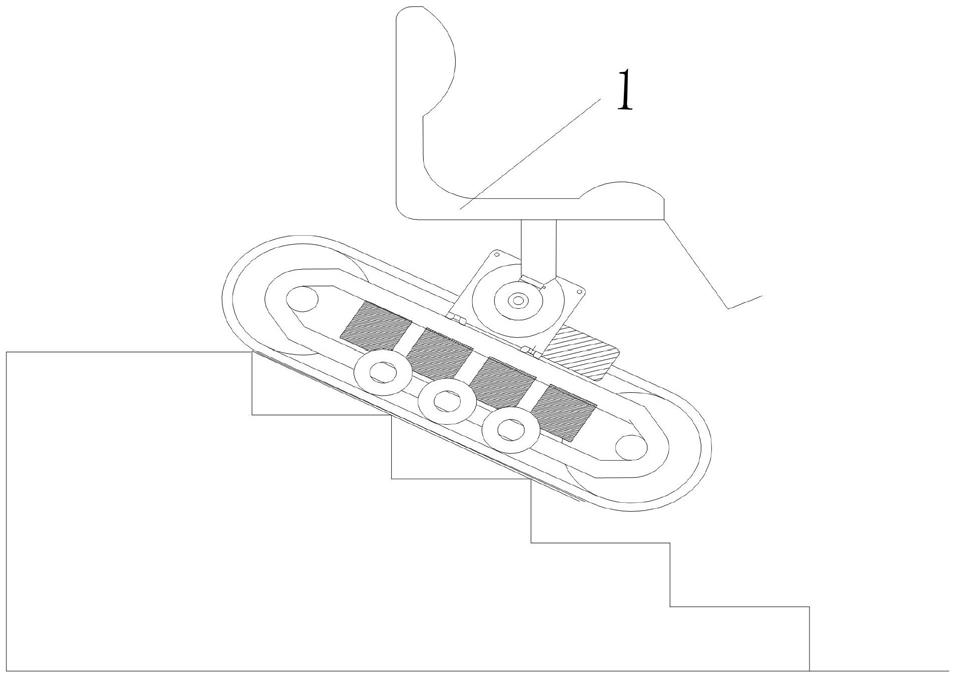
19.图1为本发明实际工作时的结构示意图;
20.图2为本发明的第一变形结构示意图;
21.图3为本发明的第二变形结构示意图;
22.图4为本发明的第一变形结构和第二变形结构组合后的结构示意图。
23.图标:1、座椅;2、承重杆;3、调节电机;4、脚踏板;5、承重件;6、蓄电池;7、负重轮;8、承载架;9、履带;10、驱动轮;11、承重减速机;12、驱动件;13、拉杆。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
25.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
27.在本发明实施例的描述中,需要说明的是,若出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.此外,若出现术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
29.在本发明实施例的描述中,“多个”代表至少2个。
30.在本发明实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
31.实施例
32.请参照图1-图3所示,图1为本发明实际工作时的结构示意图;
33.图2为本发明的第一变形结构示意图;
34.图3为本发明的第二变形结构示意图;
35.图4为本发明的第一变形结构和第二变形结构组合后的结构示意图。
36.本技术实施例提供一种新型爬楼履带9椅,包括行走机构和座椅1,座椅1安装于行走机构上,行走机构之间设有用于调整座椅1与行走机构相对位置的调位组件。本技术方案的主要目的是解决现有技术中,设置的履带9椅在楼梯上爬行时,人体随行走椅一起呈一定斜度矗立于楼梯上,容易在年老或行走不便的使用人员使用本装置时,造成使用者的心里出现严重的恐惧感,且若人体随行走椅一起呈一定斜度矗立于楼梯上时,人体的中心始终向后,容易导致行人连带履带9椅一起在楼梯上滑动,造成使用人员从楼梯上跌落,对使用人员造成严重的伤害;为了避免上述情况的发生,本技术方案通过在行走机构之间设有用于调整座椅1与行走机构相对位置的调位组件,设置的调位组件用于保证行走机构倾斜与楼梯上时,设置的调位组件将控制座椅1运动,继而改变座椅1与楼梯之间的倾仰关系,保证座椅1与楼梯之间始终保持水平,继而将乘坐在本履带9椅上的平稳的托运至相邻两个楼梯之间较为平稳的位置上;且设置的座椅1能为使用本装置的使用人员提供较为舒适的使用环境,并且设置的行走机构能带动本装置平稳的行走在楼宇内的楼梯上,为行动不便和年老体衰的使用者提供便利。
37.进一步的,还包括设置的水平传感器和位置传感器以及探头雷达用于实时监控本装置的运行状态,且上述传感器均与控制模块连接,将其探知的具体讯息传递至控制模块后,由控制模块统一并处理后,控制本装置运转。
38.在本发明的一些实施例中,行走机构包括承载架8,承载架8上安装有两组成对设置的驱动轮10,承载架8上套设有与驱动轮10适配的履带9,承载架8上设有驱动驱动轮10运
动的驱动电机。设置的行走机构有承载架8、履带9和驱动轮10,组成能承载较重的重量,并将乘坐在本装置上的托运起并带动其在楼梯之间平稳的运动,并且设置的驱动电机能带动本装置匀速的运动,保证乘坐本装置的使用人员的行车安全。
39.进一步的,设置的驱动电机型号为:48v 1.3kw 110大功率直流伺服电机选型直流伺服电机低压伺服电机。
40.进一步的,驱动电机的数量为2部或4部,当驱动电机的数量为2部时,每个驱动电机驱动一个履带9,使两边的履带均具备动力,增加本装置的驱动力,使本装置在跨越较为险峻的楼梯时,也能自由的上下;当驱动电机的数量为4部时,两个驱动电机共同驱动一个履带9,使两边的履带均具备充足的动力。防止某一驱动电机失效影响本装置的正常运转,造成本装置突然下滑,影响使用者的生命安全。
41.进一步的,设置的履带9为橡胶材质,且履带9的外侧壁上设有较深的花纹,用于增加与地面的摩擦力。
42.橡胶履带主要是针对特殊场合而使用,像阅兵式的时候,坦克,装甲车等,保护地面!橡胶履带行走系统,噪声低,振动小,乘坐舒适,特别适合于高速转移多的场合,实现了全路面通过性能。先进可靠的电器仪表及整机状态监控系统,为驾驶员正确操纵提供了可靠的保证。除了应用于军事外,也广泛用于大型机械,如挖土机等履带9车辆,其功能性和作用相同。
43.橡胶履带的优点,橡胶履带是一种在橡胶带中嵌中有一定数量的金属及钢丝帘线履带9式行走部件,它具有如下优点:(1)速度快;(2)噪音低;(3)振动小;(4)牵引力大;(5)接地压小;(6)机体重量轻。
44.橡胶履带是采用氯丁橡胶、玻璃纤维线绳和尼龙弹性布三种主要材料制成的环形胶带,采用同步带啮合型传动,具有接地压力小、牵引力大、爬楼梯振动小、噪声低、湿田地通过性好、不易损伤路面、行驶速度快等特点!橡胶履带主要应用于工业机器人、特种作业机器人、服务机器人、微型机器人等各种智能履带9式机器人的行走、越障、爬楼梯等动作的完成!
45.橡胶履带的橡胶部件包括花纹侧胶、底胶、帘布胶、布层胶等。
46.(1)花纹侧胶
47.花纹侧胶以防带体受机械损伤和早期磨损,向路面传递车辆的牵引力和制动力,吸收和传递橡胶履带在运动时的振动。花纹侧胶的行驶部分是由不同形状花纹块和花纹沟构成的表面,有平行、单梯、双梯、人字型等类型~花纹块的选型和高度设计应以适应地形条件和提高牵引力为前提,同时顾及成本。构型应避免应力集中,改变抗裂口增长性,减少碎石挤入花纹块内造成橡胶早期破坏,并具备良好的耐磨、耐刺扎、耐撕裂性、以防崩花掉块、耐屈挠和耐老化性能等。
48.(2)底胶
49.底胶在花纹侧胶的下层,用来缓冲振动和冲击。橡胶履带在使用过程中,底胶经受反复变形,产生大量的热,因此底胶应具备低生热性、导热性高、弹性高和良好的粘合性能。
50.(3)帘布胶和布层胶
51.帘布胶应具有较高的弹性和柔软性、良好的导热性和气密性、优良的动态性能和耐热性能以及与骨架材料良好的粘合性能。布层胶应与帘布胶具有良好的粘合性能,并具
有良好的压延工艺性能。
52.在本发明的一些实施例中,调位组件包括安装于承载架8上的承重减速机11和调节电机3,承重减速机11的赎输出端上设有与座椅1连接的承重杆2,调节电机3的输出端与承重减速机11的输入端传动连接。通过设置的通过设置的调位组件能在承重减速机11和调节电机3的共同作用下调节座椅1与行走机构之间的夹角,继而将位于本装置上的乘坐人员保持与楼梯之间呈水平状态,避免人体的中心始终向后,导致行人连带履带9椅一起在楼梯上滑动,造成使用人员从楼梯上跌落,对使用人员造成严重的伤害,还能减小使用人员在上下楼梯是的恐惧感。
53.进一步的,设置的承重减速机11为:k系列硬齿面锥齿轮减速机变速箱齿轮减速机齿轮减速箱;并且设置的承重减速机11能实现自锁的功能;设置的调节电机3为水平调速电机,还可为步进电机,能随意控制使用本电机的转速和旋转角度,随时相应控制模块的控制,保证本座椅1与行走机构保持相对的水平。
54.进一步的,水平调速电机是利用改变电机的磁极对数、电压、电流、频率等方法改变电机的转速,以使电机达到较高的使用性能的一种电机;其优异性能。结构简单,运行稳定,使用可靠,维护方便;直接使用三相交流电源,设备投资少;起动性能好,起动力矩大,起动平滑;控制功率小,便于自控、遥控和群控;调速精度高,与本厂普通系列控制器配合后,转速变化率不大于2.5
℅
,与本厂精密型控制配合后,转速变化率小于1
℅
;调速范围广,无失控区。
55.在本发明的一些实施例中,调位组件包括铰接于承载架8上的承重件5,承重件5与座椅1连接,承载架8的侧壁上安装有驱动件12,驱动件12的输出端设有拉杆13,拉杆13与座椅1的靠背连接。通过将座椅1与承载架8通过承载件连接,能使座椅1在承载架8上旋转,迫使座椅1在承载架8上能倾斜一定角度,即座椅1在承载架8上前后旋转,不能左右摆动,然后在通过设置的驱动件12和拉杆13的共同作用下对座椅1在承载架8上的倾斜角度进行调控,迫使座椅1与行走机构保持相对的水平,让乘坐人员保持相对水平的状态进行上升或下降运动。
56.进一步的,上述设置的两种调位组件可单独独立使用,减小成本,亦可二者结合后使用,增加本装置运行时的稳定性,保证使用本装置的使用人员在上下楼梯时,座椅1不会轻易的在承载架8上发生倾斜,对乘坐人员起到保护作用;且二者同时使用时,设置的控制模块能控制两个独立的组件同步运动,保证本装置的平稳运行。
57.在本发明的一些实施例中,其特征在于,座椅1上成对设置有脚踏板4。通过设置在座椅1上的脚踏板4能避免使用者的脚部悬空,造成使用在上升或下降时,失重感加急,影响乘坐人员的心情。
58.在本发明的一些实施例中,承载架8内设有多组蓄电池6,驱动电机和驱动件12均与蓄电池6连接。通过设置在承载架8内的4组蓄电池6能为本装置的运转提供充足的能源,保证本装置的正常运行,和较长的运行时间。
59.进一步的,设置的蓄电池6均为铅酸电池,且数量为4组。
60.在本发明的一些实施例中,座椅1的上设有用于束缚人体的束缚组件。通过设置的束缚组件能将使用人员固定在座椅1上,保护使用人员,防止其从座椅1上跌落。
61.在本发明的一些实施例中,还包括控制模块,驱动电机、驱动件12和蓄电池6均与
控制模块连接;控制模块用于控制驱动电机、驱动件12和蓄电池6运转。设置的控制模块能控制本装置正常的运转,并且在本控制模块内事先植入程序,用于有序的控制本装置正常运转。
62.进一步设置的驱动件12为电动推杆,能直接使用电源驱动。
63.进一步的,控制模块为西门子200。
64.在本发明的一些实施例中,座椅1上设有与控制模块连接的控制面板。设置的控制面板能便于乘坐本装置的乘坐人员和辅助乘坐人员的人员操控本装置运转。且控制面板上设有启停按钮、控制速度的控制按钮等等。
65.在本发明的一些实施例中,承载架8的侧壁上设有4个或3个与履带9适配的负重轮7,且负重轮7置于履带9相对的侧壁之间。通过设置的负重轮7能使本履带9与楼梯之间的地面接触的更佳紧密,避免本装置运行在楼梯上时滑落,造成使用人员出现损伤。
66.综上所述,本技术实施例提供一种新型爬楼履带9椅,包括行走机构和座椅1,座椅1安装于行走机构上,行走机构之间设有用于调整座椅1与行走机构相对位置的调位组件。本技术方案的主要目的是解决现有技术中,设置的履带9椅在楼梯上爬行时,人体随行走椅一起呈一定斜度矗立于楼梯上,容易在年老或行走不便的使用人员使用本装置时,造成使用者的心里出现严重的恐惧感,且若人体随行走椅一起呈一定斜度矗立于楼梯上时,人体的中心始终向后,容易导致行人连带履带9椅一起在楼梯上滑动,造成使用人员从楼梯上跌落,对使用人员造成严重的伤害;为了避免上述情况的发生,本技术方案通过在行走机构之间设有用于调整座椅1与行走机构相对位置的调位组件,设置的调位组件用于保证行走机构倾斜与楼梯上时,设置的调位组件将控制座椅1运动,继而改变座椅1与楼梯之间的倾仰关系,保证座椅1与楼梯之间始终保持水平,继而将乘坐在本履带9椅上的平稳的托运至相邻两个楼梯之间较为平稳的位置上;且设置的座椅1能为使用本装置的使用人员提供较为舒适的使用环境,并且设置的行走机构能带动本装置平稳的行走在楼宇内的楼梯上,为行动不便和年老体衰的使用者提供便利。
67.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1