下肢康复机器人膝关节
1.本实用新型涉及一种下肢康复训练机器人,属于康复医疗设备技术领域,具体是一种下肢康复机器人膝关节。
背景技术:
2.下肢康复机器人主要是为患者进行有效的康复训练,能够代替人工理疗师的大部分作用,可以节约大量的人力。其作用机理是:机器人的关节活动带动患者的下肢进行各种运动,进一步能够激活患者下肢的损伤部分,从而起到康复理疗的作用。由此可见,关节是下肢康复机器人的重要部分。
3.针对患者症状的不同程度,现有下肢康复机器人主要包括两类,一类是针对下肢机能丧失较多的重症患者,采用被动训练的机器人;一类是针对具备部分下肢机能的轻症患者,采用主动训练机器人,大部分是可穿戴下肢康复机器人。
4.中国发明专利(授权公告号:cn 102327173 b,名称:外骨骼可穿戴下肢康复机器人)公开了一种包含膝关节的可穿戴下肢康复机器人,膝关节包括:膝关节小腿上杆件、膝关节驱动电机及膝关节大腿下杆件,膝关节驱动电机采用谐波减速器及盘式电机,实现驱动贴合关节。
5.中国发明专利(申请公布号:cn 107693304 a,名称:一种下肢康复机器人)公开了一种包含膝关节的下肢康复机器人,膝关节包括:膝关节支座、轴二、轴承二、键二、轴套、轴承盖三、轴承盖四、第四步进电机、主动大带轮、从动大带轮。
6.就下肢康复机器人膝关节而言,现有技术都是采用了分体式结构,即电机、减速机、传感器是分体的,这就造成了关节自身较重,体积大,成本高,由于关节自重影响机器人的工作,体积大会限制其运动范围,故有必要提供一种能克服以上不足的新型下肢康复机器人膝关节。
技术实现要素:
7.本实用新型要解决的技术问题是如何将膝关节的电机、减速机、传感器集成在一体,减小关节重量和体积,并降低关节成本;方便穿线。
8.为解决技术问题,本实用新型采用如下技术方案实现:一种下肢康复机器人膝关节,包括主轴,端盖,u型拨叉架,发送接收对管,码盘,转子,u型支架,内齿圈,行星轮,行星轮支撑轴承,轴承卡环,内齿圈支撑轴承,垫片,紧固螺母,壳体支撑轴承,行星轮架,太阳轮,连接板,转子支撑轴承,壳体,外永久磁铁,铁芯线圈,穿线孔,内永久磁铁,套管,控制板,止推轴承,螺钉。
9.电机、减速机、传感器组件及控制板全都构造在由壳体、端盖形成的空间内。电机组件包括:铁芯线圈、内永久磁铁、外永久磁铁、转子、转子支撑轴承;减速机组件包括:太阳轮、行星轮、行星轮架、行星轮支撑轴承、内齿圈、内齿圈支撑轴承、止推轴承、轴承卡环;传感器组件包括:码盘、发送接收对管、u型拨叉架、u型支架、连接板。
10.为使关节结构紧凑,尽量减少不必要的零件,将电机组件与减速机组件同轴连接,即都安装在主轴上;减速机采用行星结构,其太阳轮直接安装在转子上,行星轮架固定在主轴上,内齿圈输出旋转运动;传感器用来测量电机和减速机的输出转速,分别构造两个传感器来实现,为进一步减小空间占用,提高关节的集成度,传感器采用光电式发送、接收对管加码盘的形式,将两个码盘分别安装在内永久磁铁及内齿圈上,构造u型拨叉架和u型支架来固定发送接收对管。
11.为减少连接电线的长度,实现机电一体化,将控制板固定在主轴上,这样外部只需提供电源线及控制线即可。
12.考虑到下肢康复机器人的实际工作受力情况及减小体积的要求,采用双列球轴承支撑转子及内齿圈。
13.下肢康复机器人的电源往往都在机体上,一般需要从膝关节向踝关节输送电源及控制线,故在关节中间开通孔用于穿电线。
14.与现有技术相比本实用新型的有益效果是:关节集成度高,整体紧凑,占用空间小,重量轻,成本低,便于穿电线。
附图说明
15.下面结合附图及实施例对本实用新型作进一步说明。
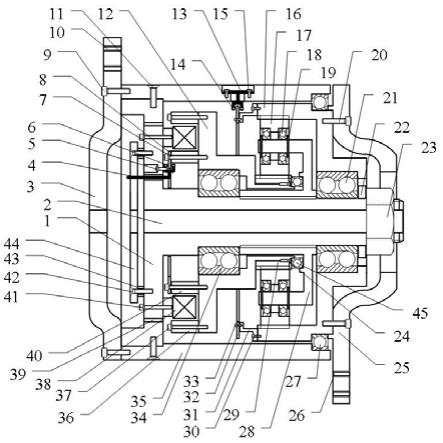
16.附图1 本实用新型系统结构示意图;
17.图1中:1、主轴,2、穿线孔1,3、端盖1,4、u型拨叉架,5、螺钉1,6、发送接收对管1,7、螺钉2,8、码盘1,9、螺钉3,10、内螺纹孔1,11、螺钉4,12、转子,13、u型支架,14、发送接收对管2,15、螺钉5,16、内齿圈,17、行星轮,18、行星轮支撑轴承,19、轴承卡环,20、螺钉6,21、内齿圈支撑轴承,22、垫片,23、紧固螺母,24、螺钉7,25、端盖2,26、内螺纹孔2,27、壳体支撑轴承,28、行星轮架,29、太阳轮,30、螺钉8,31、连接板,32、码盘2,33、螺钉9,34、转子支撑轴承,35、壳体,36、外永久磁铁,37、螺钉10,38、铁芯线圈,39、穿线孔2,40、内永久磁铁,41、螺钉11,42、螺钉12,43、套管,44、控制板,45、止推轴承。
具体实施方式
18.下面结合附图1,对本实用新型的具体实施方式做详细的说明。
19.如图1所示,螺钉11(41)将铁芯线圈(38)与主轴(1)固定连接,铁芯线圈(38)旁的主轴(1)开有穿线孔1(2)用于穿线圈的连接导线,螺钉12(42)穿过套管(43)将控制板(44)固定在主轴的内端面上。在u型拨叉架(4)的u型端焊接发送接收对管1(6),u型拨叉架(4)的拨杆从右侧穿过主轴(1)及控制板(44)上开的孔。
20.如图1所示,装入转子支撑轴承(34),使其内圈一侧靠在主轴(1)的轴承台上。分别用螺钉10(37)、螺钉2(7)将外永久磁铁(36)、码盘1(8)与内永久磁铁(40)固定在转子(12)的左侧,码盘1(8)压在内永久磁铁(40)上。将转子(12)从主轴(1)的右侧装入,使其内孔的轴承台卡住转子支撑轴承(34)的外圈。调整u型拨叉架(4)的拨杆,使发送接收对管1(6)的两个管子正好分布在码盘1(8)的刻度线两端,用螺钉1(5)固定u型拨叉架(4),码盘1(8)、u型拨叉架(4)及发送接收对管1(6)构成角速度传感器,用于测量转子的转速。太阳轮(29)与转子(12)为螺纹连接,旋入太阳轮(29)后用螺钉7(24)固定螺纹,防其退螺纹。
21.如图1所示,行星轮(17)与行星轮架(28)的轴间安装有两个行星轮支撑轴承(18),轴承外圈顶在行星轮(17)的轴承台上,内圈被轴承卡环(19)挡住。行星轮架(28)与太阳轮(29)之间由止推轴承(45)连接,止推轴承(45)的左圈内孔卡在转子(12)的轴上,端面顶在太阳轮(29)的侧面上;右圈卡入行星轮架(28)的槽内。行星轮架(28)与主轴(1)间为螺纹连接,行星轮架(28)内孔为内螺纹,主轴(1)对应位置加工有外螺纹,从主轴(1)右侧旋入行星轮架(28),使其最左侧端面顶住转子支撑轴承(34)的内圈。
22.如图1所示,从主轴(1)右侧装入内齿圈支撑轴承(21),使其内圈固定在主轴(1)上,内圈的左端面顶在行星轮架(28)的最右侧端面上,装入内齿圈(16),使内齿圈支撑轴承(21)外圈进入其轴承孔内,内齿圈支撑轴承(21)外圈右端面顶在轴承孔内的台上。用螺钉8(30)将连接板(31)固定在内齿圈(16)的外端面上;用螺钉9(33)将码盘2(32)固定在连接板(31)上。
23.如图1所示,从主轴(1)右侧装入垫片(22),旋入紧固螺母(23)使垫片(22)的左端面紧压内齿圈支撑轴承(21)的内圈右端面。装入壳体(35)使主轴(1)左侧外圆面恰好卡在壳体(35)左侧的凸台外,旋入螺钉4(11)将主轴(1)与壳体(35)固定连接。将u型支架(13)放入壳体(35)对应的孔内,用螺钉5(15)将u型支架(13)固定在壳体(35)上,发送接收对管2(14)的两个管子正好分布在码盘2(32)的刻度线两端,码盘2(32)、u型支架(13)及发送接收对管2(14)构成角速度传感器用于测量内齿圈(16)的转速。
24.如图1所示,在壳体(35)与内齿圈(16)间装入壳体支撑轴承(27),使轴承内圈与内齿圈(16)固定连接,外圈与壳体(35)固定连接。装入端盖2(25),使其左侧凸台顶紧壳体支撑轴承(27)的内圈右端面,其凸台内孔卡住内齿圈(16),旋入螺钉6(20)固定连接端盖2(25)和内齿圈(16)。
25.如图1所示,在主轴(1)左侧装入端盖1(3),旋入螺钉3(9)将壳体(35)与端盖1(3)固定连接。在端盖1(3)、控制板(44)、主轴(1)的中心各开有圆孔使整个关节中心形成一个穿线孔1(2),用于穿电气导线。
26.如图1所示,端盖1(3)的内螺纹孔1(10)用于固定连接大腿连杆,端盖2(25)的内螺纹孔2(26)用于固定连接小腿连杆。
27.工作过程:关节旋转时,控制板(44)控制铁芯线圈(38)的电流,通过电磁场的作用力使转子(12)旋转,带动安装于其上的太阳轮(29)旋转,经行星轮(17)驱动内齿圈(16)旋转,内齿圈(16)带动安装于其上的端盖2(25)旋转,从而形成关节的旋转运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1