一种软体内窥镜
1.本实用新型属于医疗内窥镜领域,更具体地,涉及一种软体内窥镜。
背景技术:
2.医疗内窥镜是指经人体的天然孔道,或者是经手术做的小切口进入人体内,观察感兴趣区域的光学设备。不同长度和直径的内窥镜可以用于检测人体的不同区域,按照检测区域的不同,内窥镜可分为腹腔镜,神经内镜,关节镜,食管镜等多个种类。内窥镜广泛应用于人体各个部位的检测和治疗,是现代医疗中极为重要的一种医疗设备。
3.内窥镜技术经过几十年的发展,目前医疗用内窥镜的主要结构是一根长的软管,医疗工作者利用控制旋钮控制软管内部的线缆控制内窥镜弯曲部的内部的环形零件做上下移动,从而使其前端做弯曲运动。由于驱动方式的限制,目前医疗用内窥镜存在弯曲幅度小,弯曲角度受限等问题。将软体机器人技术与内窥镜结合是新型内窥镜技术发展的方向,使用软体内窥镜能够大大减少内窥镜检查时对人体的潜在损害,故研究一种软体内窥镜存在重要的意义。
4.然而,与传统的内窥镜类似,现有的软体内窥镜基于其上的摄像头只能返回病灶区域的大概位置,检测信息单一,只能返回病灶区域的大概位置,存在漏诊的风险;同时现有的内窥镜技术无法对内窥镜与管壁接触情况的感知;以食管镜为例,由于食管内部空间狭小,很容易由于操作不当而造成食管道的损伤。
技术实现要素:
5.针对现有技术的以上缺陷或改进需求,本实用新型提供了一种软体内窥镜,其目的在于解决现有技术无法快速安全精确的完成检测的技术问题。
6.为实现上述目的,本实用新型提供了一种软体内窥镜,包括:依次连接的内窥镜插入部和软体执行器;软体执行器包括依次连接的身部和头部;
7.软体执行器内设置有空腔;空腔沿着软体执行器的中心轴贯穿软体执行器;头部的空腔内设置有摄像头、光源和光纤力传感器;身部内设置有沿着空腔轴线方向周向分布的气腔;内窥镜插入部的表皮内部设置有气路管道,且与气腔相通。
8.进一步优选地,内窥镜插入部为软管。
9.进一步优选地,软体执行器的材质为硅胶。
10.进一步优选地,上述光源为冷光源。
11.进一步优选地,上述气腔的数量为多个,且气腔沿着空腔轴线方向周向均匀分布。
12.进一步优选地,气路管道与气腔的数量相同,且一个气路管道与一个对应的气腔相通。
13.进一步优选地,软体执行器的弯曲方向和弯曲程度通过调节由气路管道输入到气腔的气压来控制。
14.进一步优选地,摄像头用于采集体内的图像信息;光源用于为摄像头的拍摄区域
补光;光纤力传感器用于采集软体内窥镜感受的力信息,以获得体内的接触力数据。
15.进一步优选地,上述内窥镜插入部的表皮内部还设置有供电电路和传输电路;
16.供电电路分别与摄像头、光源和光纤力传感器相连,以分别为摄像头、光源和光纤力传感器供电;
17.传输电路分别与摄像头和光纤力传感器相连,以将摄像头采集到的图像信息和光纤力传感器采集到的接触力数据传输出去。
18.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
19.1、本实用新型提供了一种软体内窥镜,其中,内窥镜插入部的表皮内部设置有气路管道,且与气腔相通,通过内窥镜插入部中的气路管道输入到气腔的气压来调节软体执行器的弯曲运动,使得软体执行器在体内能够更加灵活的运动,拥有更加丰富的检测姿态;另外,本实用新型还在软体执行器的头部部署了光纤力传感器,以增加的力传感能力;在采集体内图像信息的同时,还进一步采集接触力数据,不仅能有效防止因为操作时用力过猛对检查部位造成损伤,还能对疑似病灶区域进行触诊,大大减小了漏诊的风险,从而快速安全精确的完成检测。
20.2、在本实用新型所提供的软体内窥镜中,光纤力传感器放置于软体内窥镜头部的中心空腔中;一方面,由于触诊的时候整个软体执行器头部需要完全接触到病灶区域,将光纤力传感器放置于接近于中央部位可以使其受力均匀,有利于测量;另一方面,若将光纤力传感器设置在边沿位置,很可能会因为位姿问题无法接触到病灶区域,同时因为中心空腔与气腔的原因,难以专门开辟一个区域放置光纤力传感器,这样设置能够大大减少软体内窥镜的尺寸,有利于应用在内部空间狭小的管道中。
21.3、本实用新型所提供的软体内窥镜,其软体执行器的材质为硅胶,可以极大的减少内窥镜对人体组织造成的损伤。
附图说明
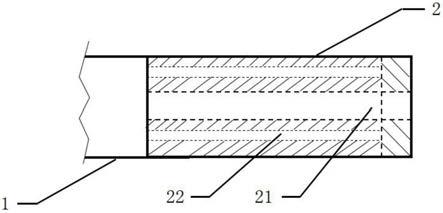
22.图1是本实用新型所提供的软体内窥镜的主观剖视图;
23.图2是本实用新型所提供的软体内窥镜中软体执行器头部的主视图;
24.图3是本实用新型所提供的软体内窥镜中软体执行器中间部分的主视图;
25.图4是本实用新型所提供的软体内窥镜的工作示意图;其中,(a)为摄像头探测可能存在病灶的示意图;(b)为光纤力传感器接触可能存在病灶的区域的示意图。
26.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
27.1为内窥镜插入部,2为软体执行器,3为病灶,21为空腔,22为气腔,23为摄像头,24为光源,25为光纤力传感器。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
29.为了实现上述目的,本实用新型提供了一种软体内窥镜,如图1和图2所示,包括:依次连接的内窥镜插入部1和软体执行器2;
30.其中,软体执行器2包括依次连接的身部和头部;软体执行器内设置有空腔21;空腔21沿着软体执行器2的中心轴贯穿软体执行器;头部的空腔内设置有摄像头23、光源24和光纤力传感器25;身部内设置有沿着空腔轴线方向周向分布的气腔22;内窥镜插入部为一根软管,其表皮内部设置有气路管道,且与气腔相通。结合图1可以看出,软体执行器2的头部可以起到密封气腔的作用。优选地,软体执行器的材质为硅胶,硅胶质地十分柔软,可以极大的减少内窥镜对人体组织造成的损伤。
31.如图2所示,摄像头23、光源24和光纤力传感器25共同固定在软体执行器2头部的空腔21内,构成头部探测系统。其中,摄像头23用于采集体内的图像信息;光源24用于为摄像头的拍摄区域补光;光纤力传感器25用于采集软体内窥镜感受的力信息,以获得体内的接触力数据。其中,图像信息是主要的检测信息,用于判断有关组织是否发生病变或者损伤。一般而言,人身体内部各个部分的环境都是阴暗的,这个时候,合理的补光就显得非常重要,为了不伤害人体,光源优选为冷光源。但是,由于摄像头拍摄的图像质量极大的受到内窥镜头部姿态的影响,当拍摄角度不好的时,可能图像根本就没有拍到病灶区域,或者图像中的病灶很不明显,难以识别,造成漏诊。为了解决以上问题,首先,本实用新型加入了光纤力传感器25,光纤力传感器能够很好的反馈内窥镜头部受到的力,一般而言,病灶区域和正常区域组织的软硬度不同,这就导致光纤力传感器在与之接触时会获得不同的接触力,当发现疑似病灶区域时,可以使光纤力传感器与病灶区域做更加细致的接触,根据光纤力传感器感受力的不同,对疑似病灶区域进行触诊,得到病灶的精确位置与形状,大大提高了探测的精确度。通过多传感器融合的方式,在采集图像信息的同时,也采集接触力信息,能够大大减少漏诊的风险。其次,本实用新型采用软体执行器2,软体执行器2的中心轴上设置有空腔,易于弯曲,且其弯曲方向和弯曲程度可以通过调节由气路管道输入到气腔的气压来控制;将摄像头23、光源24和光纤力传感器25设置在软体执行器2的头部,可以大大增加探测的灵活性,提供了更多且更可控的探测角度,大大减小了漏诊率。除此之外,为了使软体执行器2能够灵活弯曲且可控,软体执行器2无法设计的过长,使用受限,故本技术在软体执行器2之前接入了一个内窥镜插入部1,以大大增加软体内窥镜的长度。优选地,内窥镜插入部1为一根软管。进一步地,为了使得软体内窥镜可控,且使用方便,本实用新型在内窥镜插入部的表皮内部设置有气路管道,且与软体执行器2的气腔相通,通过调节由气路管道输入到气腔的气压可以控制软体执行器2的弯曲方向和弯曲程度。
32.优选地,如图3所示为软体执行器中间部分的主视图,气腔的数量可以有多个,且沿着空腔轴线方向周向均匀分布,有利于使软体执行器受力均匀,运动学分析以及相应控制更为简易;气路管道与气腔的数量相同,且一个气路管道与一个对应的气腔相通,用于灌输气体以驱动软体执行器运动,以达到各种位姿。
33.需要说明的是,在操作过程中,通过控制内窥镜插入部进入人体的长度来控制软体执行器的位置,通过调节由内窥镜插入部中的气路管道输入到软体执行器内气腔的气压来控制软体执行器的弯曲程度与弯曲程度;软体执行器上的摄像头一方面和传统内窥镜的摄像头类似对患者体内进行光学检查,另一方面可以在发现疑似病灶后为光纤力传感器做引导。光纤力传感器用于实时反馈软体执行器在体内的受力情况,辅助操作者,防止其因为
操作不当而对检测对象造成的损伤;同时可以在发现病灶后对病灶区域进行触诊,基于力反馈联合图像信息获得病灶的精确位置和形状。且光纤力传感器部署于软体执行器头部的中心空腔内,能有效防止因位姿问题导致力传感器无法有效接触到需要检查部位的情况,其在触诊的时候测量的是正压力,受力更均匀且测量更精确;同时有效利用了中心空腔的空间,使得结够更加紧凑。
34.进一步地,上述内窥镜插入部1的表皮内部还设置有供电电路和传输电路;供电电路分别与摄像头23、光源24和光纤力传感器25相连,以分别为摄像头23、光源24和光纤力传感器25供电;传输电路分别与摄像头23和光纤力传感器25相连,以将摄像头23采集到的图像信息和光纤力传感器采集到的接触力数据传输出去。此时,软体执行器2的中心空腔21用于放置头部探测系统的供电与数据传输线路,结构更加紧凑。
35.需要说明的是,本实用新型所提供的软体内窥镜可用于食管,肠道,尿道,支气管等比较狭窄空间;本实施例中,软体执行器的直径约为10mm。
36.为了进一步说明本实用新型所提供的软体内窥镜,下面以应用到食管的软体内窥镜为例进行说明。
37.软体内窥镜在食管道内工作,其总体直径要小于食管直径的20mm,内窥镜从病人的口腔内进入。当内窥镜在食管内运动时,可以通过调控输入到软体执行器中气腔的气压大小来调整软体执行器头部的姿态。当摄像头23探测到可能存在病灶3的图像信息时,将图像信息传输到控制器中以对病灶位置进行预估,得到可能存在病灶的区域,如图4中的(a)图所示。通过移动软体内窥镜,控制软体执行器头部接触可能存在病灶的区域,获得光纤力传感器25所采集的病灶的接触力数据,并传输到外部控制器中,如图4中的(b)图所示。然后外部控制器基于图像信息和病灶的接触力数据确定病灶的具体位置与大小。
38.本领域的技术人员容易理解,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1