一种新式轮椅辅助上楼装置
1.本实施例涉及轮椅技术领域,尤其涉及一种新式轮椅辅助上楼装置。
背景技术:
2.随着老龄化增加以及照顾残疾人的需求,需要使用轮椅,目前技术申请号为:cn01205624.3一种可上下楼梯的轮椅,上楼梯前可以迅速卸下承重轮,在需要使用大承重轮时又可以迅速方便的安装于轮椅上,同时这一结构可减小轮椅的长度,方便轮椅在楼梯拐弯处转弯,又可以避免大承重轮在上下楼梯时产生的诸多负面影响;
3.采用了齿轮齿条及相应的机构,既确保刚性,箱体沿齿条上下运动,又避免了箱体与齿条间产生横向的位移或扭转,使其工作时的可靠性优于现有技术中的软索滑轮机构,使用时的安全性和安定性大大增强;
4.但对于身体状况不变的使用者在独自外出时,不便于对承重轮进行拆卸,同时该装置向后运动,在上楼梯时,若正面朝上升方向,容易打翻轮椅,若后面朝上升方向,则视野被遮挡,没有安全感,因此提出一种新式轮椅辅助上楼装置。
技术实现要素:
5.本实施例的目的是为了解决现有技术中存在的缺点,而提出的一种新式轮椅辅助上楼装置。
6.为了实现上述目的,本实施例采用了如下技术方案:
7.一种新式轮椅辅助上楼装置,包括:椅体、爬行机构和控制主机;
8.所述椅体左端和右端均卡接设有可以调节角度和改变扭矩方向的爬行机构,所述椅体底端螺纹连接设有控制主机;
9.所述椅体包括:花轴、调节握柄和开关握柄;
10.所述爬行机构包括:驱动轮、轴孔、履带架、导向轮、臂杆、行星轮、履带和花轴孔;
11.所述控制主机包括:驱动电机、驱动轴一、驱动轴二、齿轮一、齿轮二、齿轮三、齿轮四、齿轮五、步进电机和可充电蓄电池。
12.作为上述技术方案的进一步描述:所述椅体左右对称设有花轴,所述调节握柄通过导线嵌合在椅体右侧扶手顶端,所述开关握柄通过导线嵌合在椅体左侧扶手顶端。
13.作为上述技术方案的进一步描述:所述爬行机构前端左右镜像对称设有驱动轮,所述爬行机构后端左右镜像对称设有导向轮,所述爬行机构顶端左右镜像对称设有行星轮。
14.作为上述技术方案的进一步描述:所述驱动轮和导向轮内侧中间均设有轴孔,所述驱动轮和导向轮外侧一端之间安装有履带架,所述履带架外侧一端的中间与行星轮外侧一端之间设有臂杆,且臂杆与行星轮外侧一端之间设有曲柄,所述驱动轮、导向轮和行星轮安装有履带,所述行星轮内侧一端中间设有花轴孔,所述花轴孔与花轴套接。
15.作为上述技术方案的进一步描述:所述控制主机内部前端左右对称镜像设有驱动
电机,所述驱动电机外侧一端设有驱动轴一,且驱动轴一外侧一端与驱动轮的轴孔相连,所述控制主机内部活动连接设有可充电蓄电池,且可充电蓄电池位于驱动电机右端。
16.作为上述技术方案的进一步描述:所述驱动轴二固定连接于臂杆内侧一端,且位于可充电蓄电池右端,所述驱动轴二内侧一端固定连接设有齿轮一,所述齿轮一底端固定连接设有齿轮二,所述齿轮一右端活动连接设有齿轮三,所述齿轮三底端固定连接设有齿轮四,所述齿轮四右端活动连接设有齿轮五,所述齿轮五外侧一端设有步进电机。
17.作为上述技术方案的进一步描述:所述可充电蓄电池与开关握柄电性连接,开关握柄与调节握柄、驱动电机和步进电机电性连接,所述调节握柄与步进电机电性连接。
18.有益效果:
19.1、臂杆绕履带架上的轴旋转,利用杠杆原理带动行星轮转动,从而实现履带不同构形,使履带可以更好的贴合楼梯表面,进行爬行,带动椅体在楼梯上进行爬移,实现上下楼,提高了上升和下降的稳定性,方便操作同时增加安全感。
20.2、通过设置齿轮一、齿轮二、齿轮三、齿轮四、齿轮五之间相互啮合,调节轮椅移动速度,同时通过履带运行,提高稳定性,同时防止打滑。
21.3、通过设置调节握柄,开关握柄,在双手可触及的位置调节和运行轮椅,便于躯体不方便的使用者使用,提高了便携性和安全性。
附图说明
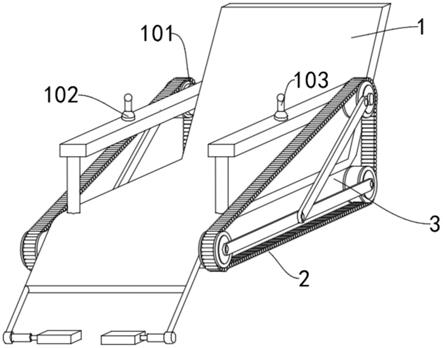
22.图1为本实施例中整体结构示意图;
23.图2为本实施例中爬行机构结构示意图;
24.图3为本实施例中控制主机俯视剖面结构示意图。
25.图例说明:
26.椅体1;花轴101;调节握柄102;开关握柄103;爬行机构2;驱动轮201;轴孔202;履带架203;导向轮204;臂杆205;行星轮 206;履带207;花轴孔208;控制主机3;驱动电机301;驱动轴一 302;驱动轴二303;齿轮一304;齿轮二305;齿轮三306;齿轮四307;齿轮五308;步进电机309;可充电蓄电池310。
具体实施方式
27.下面将结合本实施例中的附图,对本实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实施例一部分实施例,而不是全部的实施例。基于本实施例中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实施例保护的范围。
28.参照图1-3,一种新式轮椅辅助上楼装置,包括:椅体1、爬行机构2和控制主机3;
29.椅体1左端和右端均卡接设有可以调节角度和改变扭矩方向的爬行机构2,椅体1底端螺纹连接设有控制主机3,控制主机3用于通过爬行机构2驱动椅体1并调节角度和改变扭矩方向;
30.椅体1包括:花轴101、调节握柄102和开关握柄103;
31.爬行机构2包括:驱动轮201、轴孔202、履带架203、导向轮 204、臂杆205、行星轮206、履带207和花轴孔208;
32.控制主机3包括:驱动电机301、驱动轴一302、驱动轴二303、齿轮一304、齿轮二305、齿轮三306、齿轮四307、齿轮五308、步进电机309和可充电蓄电池310。
33.其中,椅体1左右对称设有花轴101,花轴101便于与爬行机构 2相连接,调节握柄102通过导线嵌合在椅体1右侧扶手顶端,调节握柄102用于调节椅体1转向和爬升,开关握柄103通过导线嵌合在椅体1左侧扶手顶端,开关握柄103用于驱动椅体1行走。
34.其中,爬行机构2前端左右镜像对称设有驱动轮201,驱动轮201 用于控制椅体1行走,爬行机构2后端左右镜像对称设有导向轮204,导向轮204控制椅体1转向,爬行机构2顶端左右镜像对称设有行星轮206,行星轮206控制椅体1爬升扭矩。
35.其中,驱动轮201和导向轮204内侧中间均设有轴孔202,轴孔 202用于连接控制主机3,驱动轮201和导向轮204外侧一端之间安装有履带架203,履带架203用于安装履带207,履带架203外侧一端的中间与行星轮206外侧一端之间设有臂杆205,且臂杆205与行星轮206外侧一端之间设有曲柄,臂杆205与履带架203后端之间设有链轮,通过曲柄使臂杆205通过杠杆作用使驱动轮201或行星轮 206抬起,驱动轮201、导向轮204和行星轮206安装有履带207,履带207使得移动时更加稳定,行星轮206内侧一端中间设有花轴孔 208,花轴孔208与花轴101套接。
36.其中,控制主机3内部前端设有左右对称镜像设有驱动电机301,驱动电机301外侧一端驱动轴一302,且驱动轴一302外侧一端与驱动轮201的轴孔202相连,控制主机3内部活动连接设有可充电蓄电池310,且可充电蓄电池310位于驱动电机301右端;
37.通过操控开关握柄103,当开关握柄103前后摇动,两个驱动电机301速度相同,通过导向轮204和行星轮206带动履带207运动,实现前进或后退移动;
38.当开关握柄103左右摇动,两个驱动电机301速度不同,通过导向轮204和行星轮206带动履带207运动,实现左右转向移动;
39.其中,驱动轴二303固定连接于臂杆205内侧一端,且位于可充电蓄电池310右端,驱动轴二303内侧一端固定连接设有齿轮一304,齿轮一304底端固定连接设有齿轮二305,齿轮一304右端活动连接设有齿轮三306,齿轮三306底端固定连接设有齿轮四307,齿轮四 307右端活动连接设有齿轮五308,齿轮五308外侧一端设有步进电机309;
40.通过操控调节握柄102前后移动,步进电机309通过与齿轮五 308齿轮四307啮合,使驱动轴二303带动臂杆205转动,另一方面通过齿轮一304、齿轮二305、齿轮三306的啮合,带动臂杆205后端的链轮旋转,链轮通过履带207通过臂杆205转动安装行星轮206上的曲柄回转,齿轮一304和齿轮二305、齿轮三306和齿轮四307的齿数相同,因此齿轮一304和齿轮二305的转速相同,而方向相反,由于履带207两端的链轮齿数相同,使得步进电机309工作时,臂杆205 转过的角度与曲柄的绝对转动角度大小相同、方向相反,臂杆205绕履带架203上的轴旋转,利用杠杆原理带动行星轮206转动,从而实现履带不同构形,使履带207可以更好的贴合楼梯表面,进行爬行,带动椅体1在楼梯上进行爬移,实现上下楼,提高了上升和下降的稳定性,方便操作同时增加安全感。
41.其中,可充电蓄电池511与开关握柄103电性连接,开关握柄 103接通可充电蓄电池511电源,开关握柄103与调节握柄102、驱动电机301和步进电机309电性连接,开关握柄103控制调节握柄 102、驱动电机301和步进电机309工作状态,调节握柄102与步进电机309电性连接,调节握柄102控制步进电机309工作状态。
42.工作原理:给驱动电机301和步进电机309通过可充电蓄电池 511通电,通过调节握柄102和开关握柄103控制驱动电机301和步进电机309工作状态;
43.通过触动开关握柄103使驱动电机301通过齿轮轴一302带动驱动轮201使履带207转动联动导向轮204和行星轮206同步运动,通过设置齿轮轴一302、齿轮轴二303和齿轮轴三306之间相互啮合,提高稳定性,同时防止打滑;
44.通过触动调节握柄102,需要向左或向右行驶时,调节握柄102 向左或向右摆动,通过差速器305使齿轮轴三306改变扭矩方向,由此进行换向,当需要上下楼梯时,调节握柄102向前或向后摆动,此时步进电机309收到脉冲信号,通过键轴310使臂杆205在履带架 203上转动,同时,通过曲柄使臂杆205在行星轮206上转动,通过杠杆作用使驱动轮201或行星轮206抬起,提高了上升和下降的稳定性,方便操作同时增加安全感。
45.以上所述,仅为本实施例较佳的具体实施方式,但本实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实施例揭露的技术范围内,根据本实施例的技术方案及其实施例构思加以等同替换或改变,都应涵盖在本实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1