一种辅助机器人插管的喉镜
1.本实用新型属于医疗器械技术领域,特别涉及一种辅助机器人插管的喉镜。
背景技术:
2.在新冠疫情爆发期间,很多重症患者由于不能自主呼吸,需要医生给病人进行气管插管操作来辅助病人呼吸,但在插管操作时,由于病毒可能随时从口腔喷出大量分泌物,很可能导致医生在插管过程中遭到感染。同时由于液体喷出速度快、时机不可预测,医生必须提前准备大量防护才能尽量避免感染,但同时准备防护也意味着可能耽误最佳的插管抢救时机。因此,我们希望研发自动插管机器人代替医生完成全流程的插管操作。
3.而气管插管术中,一个必要的辅助器械就是喉镜,传统喉镜是只具备单光源的机械喉镜,医生在插管操作是,视野非常有限,对于气道较为狭窄的困难气道患者,插管的成功率就会明显降低。而近些年来,可视喉镜逐步得到发展,但是经过调研,现在市场上大多数可视喉镜价格昂贵,且图像大多封装集成在产品内部,无法直接实时导出进行图像处理分析,而内窥镜设备可以实现小型化、提供照明和实时图像传输的功能,因此我们希望自主研发一款价格相对低廉、协同内窥镜的便于计算机实时读取、存储图像的辅助喉镜。
4.其次,在插管过程中,喉镜前段的摄像头镜头容易被口腔分泌物遮蔽视野,同时对有传染性疾病的患者,其分泌物可能感染医生,目前的吸痰技术通常是人工事先插入吸痰管来清理患者口腔分泌物,但依然无法保证在插管过程中没有新的分泌物出现,因此需要整合吸痰功能在喉镜上实时进行吸痰。
5.最后,医生会在插入导管前会在到导管中加入管芯/导丝,并将导丝人工弯成合适的弧度,最终插入后抽出导丝连接呼吸机。而这样的有导丝的插管技术对机器人来说是相对复杂且耗时的,因此需要设计无导丝的导管引导方法。
技术实现要素:
6.本实用新型的目的是提出一种辅助机器人插管的喉镜,以克服现有技术中的缺点,使其结构简洁,使用方便安全,寿命长,适于机器人气管插管,有利于大规模推广应用。
7.本实用新型提出的辅助机器人插管的喉镜,包括接口部分和工作部分;所述的接口部分位于喉镜的后端,接口部分加工成有夹持凹槽的底座,用于机器人的机械爪抓握,或将接口部分加工成与机器人适配的连接孔的底座,用于直接与机器人的机械手相互连接;所述的工作部分加工有刀片和会厌压片,会厌压片较长于刀片;刀片和会厌压片之间形成气管导管通道,气管导管从刀片尾部的弧形缺口处进入气管导管通道;刀片的刀背中加工有吸痰管道,吸痰管道与接口部分中加工的吸痰管出口相连通;刀片的上表面加工有内窥镜安装槽,用于安装插管用内窥镜。
8.本实用新型提出的辅助机器人插管的喉镜,其优点是:
9.本实用新型的辅助机器人插管的喉镜,与现有技术相比,本实用新型集成了可视化
‑ꢀ
清理分泌物
‑
打开气道
‑
引导导管等功能。即可放置内窥镜传输图像;吸痰管通道可清
理口腔分泌物,防止遮挡内窥镜;会厌压片插入口腔上提可打开气道;通过导管槽引导可实现无导丝的插管。本实用新型的辅助机器人插管的喉镜,成功地解决了一般可视喉镜难以实时导出图像的问题,实现了气管插管中多个任务,为机器人自动气管插管提供了硬件基础。而且本实用新型的辅助机器人插管的喉镜,设计独特,结构简洁,使用方便安全,寿命长,适于机器人气管插管和大规模推广应用。
附图说明
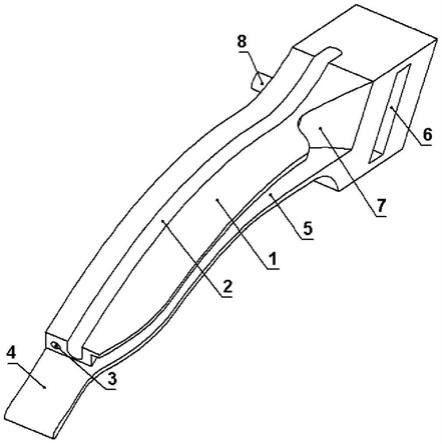
10.图1是本实用新型提出的辅助机器人插管的喉镜的结构示意图。
11.图2是本实用新型喉镜装置的一个实施例的结构示意图。
12.图3是喉镜装置的剖视图。
13.图1
‑
图3中,1是刀片,2是内窥镜安装槽,3是吸痰管道,4是会厌压片,5是气管导管通道,6喉镜接口,7是弧形缺口,8是吸痰管出口。
具体实施方式
14.本实用新型提出的辅助机器人插管的喉镜,其结构示意图如图1所示,包括接口部分和工作部分;所述的接口部分6位于喉镜的后端,接口部分6加工成有夹持凹槽的底座,用于机器人的机械爪抓握,或将接口部分加工成与机器人适配的连接孔的底座,如图2所示,用于直接与机器人的机械手相互连接。工作部分加工有刀片1和会厌压片4,会厌压片4较长于刀片1;刀片1和会厌压片4之间形成气管导管通道5,气管导管从刀片1尾部的弧形缺口7处进入气管导管通道5;刀片1的刀背中加工有吸痰管道3,如图3所示,吸痰管道3与接口部分6中加工的吸痰管出口8相连通。刀片1的上表面加工有内窥镜安装槽2,用于安装插管用内窥镜。
15.本实用新型提出的辅助机器人插管的喉镜中,喉镜接口位于喉镜刀片的后端,便于与机器人的机械臂连接,根据连接机械臂的方式不同,本实用新型设计了两种喉镜接口,一种喉镜接口为适应机器人的机械爪夹取的夹持槽,其结构如图1所示,另一种喉镜接口为直接固连于机器人的机械臂上的连接底座,其结构如图2所示。
16.本实用新型的一个实施例如图1所示,该辅助机器人的喉镜装置的喉镜接口6,通过机器人的机械爪夹取。首先将内窥镜固定在喉镜的内窥镜安装槽2中,然后将外部吸痰装置连接吸痰管道3上,机器人插入喉镜过程中,可能有唾液等分泌物,可以经吸痰管道3 吸取,既可以清理患者气道,也避免分泌物遮挡相机的视野,影响视觉导航。待会厌压片 4伸入会厌和舌头之间,上提喉镜,在内窥镜视野中看到会厌和气道,就可以插入气管导管。气管导管使用另一个机械臂抓取,可经气管导管通道5实现无导丝的插入,直接沿槽到达喉镜最前端。最后待气管导管成功通过声门到达指定位置后,喉镜与气管导管分离,抽出喉镜,给导管连接呼吸机,完成插管操作。
17.本实用新型已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本实用新型的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
技术特征:
1.一种辅助机器人插管的喉镜,其特征在于辅助机器人插管的喉镜包括接口部分和工作部分;所述的接口部分位于喉镜的后端,接口部分加工成有夹持凹槽的底座,用于机器人的机械爪抓握,或将接口部分加工成与机器人适配的连接孔的底座,用于直接与机器人的机械手相互连接;所述的工作部分加工有刀片和会厌压片,会厌压片较长于刀片;刀片和会厌压片之间形成气管导管通道,气管导管从刀片尾部的弧形缺口处进入气管导管通道;刀片的刀背中加工有吸痰管道,吸痰管道与接口部分中加工的吸痰管出口相连通;刀片的上表面加工有内窥镜安装槽,用于安装插管用内窥镜。
技术总结
本实用新型属于医疗器械技术领域,特别涉及一种辅助机器人插管的喉镜。喉镜包括接口部分和工作部分;所述的接口部分位于喉镜的后端,接口部分加工成有夹持凹槽的底座,用于机器人的机械爪抓握,或加工成与机器人适配的连接孔的底座,工作部分加工有刀片和会厌压片,会厌压片较长于刀片;刀片和会厌压片之间形成气管导管通道,刀片的刀背中加工有吸痰管道,吸痰管道与接口部分中加工的吸痰管出口相连通;刀片的上表面加工有内窥镜安装槽。本实用新型实现了气管插管中多个任务,为机器人自动气管插管提供了硬件基础。而且设计独特,结构简洁,使用方便安全,寿命长,适于机器人气管插管和大规模推广应用。管和大规模推广应用。管和大规模推广应用。
技术研发人员:程奥华 丘铱可 郝瀚 徐奕舟 聂宇轩 蒋玉骅 郑钢铁
受保护的技术使用者:清华大学
技术研发日:2021.06.11
技术公布日:2021/12/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1