植入物安装工具以及骨科手术机器人的制作方法
1.本实用新型涉及手术机器人技术领域,特别是涉及一种植入物安装工具以及骨科手术机器人。
背景技术:
2.骨科手术机器人关节置换手术中,需要将植入物植入到股骨的特定位置。目前,骨科手术机器人主要是通过植入物安装工具实现植入物的植入操作,保证植入物安装到位。目前,骨科手术机器人手术时,不同部位的骨骼所需的植入物形状不同,相应的,植入物也需要适配的安装接口进行操作。但是,目前的植入物安装工具为一体式结构,安装接口不统一,末端只能安装特定接口的植入物,对于不同接口的植入物需要更换整个安装工具,操作比较繁琐,且成本较高,不便于使用。
技术实现要素:
3.基于此,有必要针对目前末端机械接口不统一导致整体更换安装工具的问题,提供一种适配不同植入物的植入物安装工具以及骨科手术机器人。
4.一种植入物安装工具,包括:
5.安装基座,所述安装基座具有一通孔容纳腔;
6.转动轴,所述转动轴包括支撑结构、操作结构和连接部件,所述支撑结构安装于所述安装基座的通孔容纳腔,所述操作结构可拆卸设置于所述支撑结构的一端;所述连接部件可拆卸设置于所述支撑结构的另一端。
7.在其中一个实施例中,所述支撑结构包括支撑主轴以及安装组件,所述支撑主轴具有与所述连接部件连接的安装接口,所述安装组件可拆卸连接所述支撑主轴与所述连接部件。
8.在其中一个实施例中,所述安装组件包括转接轴以及第一定位件,所述转接轴的一端安装于所述安装接口,所述转接轴具有与所述连接部件连接的连接接口,所述第一定位件将所述转接轴固定于所述支撑主轴。
9.在其中一个实施例中,所述安装组件还包括锁紧套,所述锁紧套部分套设于所述转接轴与所述连接部件的外侧,用于将所述连接部件固定于所述转接轴;
10.所述锁紧套通过卡扣、螺纹或定位销与所述连接部件连接。
11.在其中一个实施例中,所述安装组件包括止挡部件以及可滑动套设于所述支撑主轴的滑动部件,所述滑动部件沿所述支撑主轴滑动时,所述滑动部件能够遮挡或露出所述安装接口,所述止挡部件用于对所述滑动部件露出所述安装接口的运动进行限位。
12.在其中一个实施例中,所述滑动部件包括第一限位件、滑动弹性件以及定位滑套,所述定位滑套可滑动套设于所述支撑主轴,所述支撑主轴上开设限位滑槽,所述第一限位件穿过所述定位滑套可滑动安装于所述滑槽中,所述滑动弹性件设置于所述定位滑套内,并与所述定位滑套的内壁以及所述止挡部件抵接;
13.所述定位滑套压缩所述滑动弹性件时,所述定位滑套能够露出所述安装接口;所述滑动弹性件的弹性力能够使所述定位滑套遮挡所述安装接口。
14.在其中一个实施例中,所述止挡部件包括设置于所述支撑主轴的限位套筒以及将所述限位套筒固定于所述支撑主轴的第二定位件,所述限位套筒的端部伸入所述定位滑套内,并与所述滑动弹性件抵接,所述限位套筒具有限位台阶,所述限位台阶能够对所述定位滑套限位。
15.在其中一个实施例中,所述安装接口包括沿径向方向设置的限位槽,所述连接部件的端部具有限位凸起,所述限位凸起沿径向方向拆装于所述限位槽;
16.或者,所述安装接口为内螺纹接口,所述连接部件的端部具有与所述内螺纹接口配合的外螺纹。
17.在其中一个实施例中,所述安装组件还包括第三定位件,所述支撑主轴的外壁开设第一定位槽,所述连接部件的外壁开设第二定位槽,所述第一定位槽与所述第二定位槽相对设置,所述定位滑套的外壁开设连通所述第一定位槽与所述第二定位槽的第三定位槽,所述第三定位件穿过所述第三定位槽安装于位于所述第一定位槽与所述第二定位槽中。
18.在其中一个实施例中,所述操作结构包括敲击柄以及弹性连接组件,所述敲击柄具有配合孔,所述敲击柄通过所述配合孔安装于所述支撑主轴远离所述连接部件的端部,所述支撑主轴具有沿径向方向设置的安装孔,所述弹性连接组件设置于所述安装孔中,并伸出所述安装孔与所述配合孔的内壁抵接。
19.在其中一个实施例中,所述弹性连接组件包括敲击弹性件以及第二限位件,所述敲击弹性件设置于所述安装孔中,所述敲击弹性件与所述第二限位件连接,并使所述敲击弹性件与所述配合孔的内壁抵接。
20.在其中一个实施例中,所述支撑主轴的端部具有第一导向面,所述配合孔的内壁具有与所述第一导向面配合的第二导向面,所述第一导向面与所述第二导向面用于引导所述支撑主轴安装于所述敲击柄中。
21.一种骨科手术机器人,其特征在于,包括机器人主体、设置于所述机器人主体的机械臂以及如上述任一技术特征所述的植入物安装工具;
22.所述植入物安装工具用于安装植入物,并设置于所述机械臂中,所述机械臂带动所述植入物安装工具执行骨科手术。
23.采用上述实施例后,本实用新型至少具有如下技术效果:
24.本实用新型的植入物安装工具以及骨科手术机器人,支撑结构的一端可拆卸连接操作结构,支撑结构的另一端可拆卸安装连部件,通过连接部件连接所需的植入物。使用时通过锤子敲击敲击组件实现植入物的安装。连接部件拆卸时,可以更换适配植入物的连接部件。通过连接部件在支撑结构的可拆卸安装,实现不同类型的连接部件的更换,以适配不同类型的植入物,有效的解决目前末端机械接口不统一导致整体更换安装工具的问题,无需更换整体工具,当需要安装不同类型的植入物时,只需将连接部件拆卸更换与植入物适配的连接部件即可,简化操作步骤,适用范围广。同时,本实用新型的植入物安装工具的结构简单,拆装便利,便于使用。
附图说明
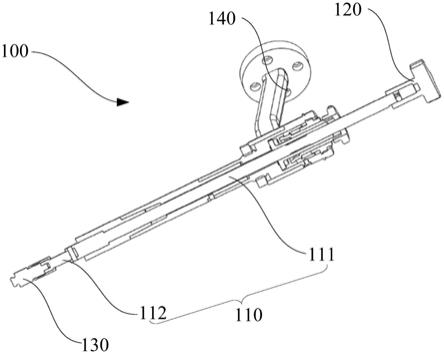
25.图1为本实用新型第一实施例的植入物安装工具的立体图;
26.图2图1所示的植入物安装工具中支撑结构与连接部件连接处的示意图;
27.图3为图1所示的植入物安装工具中支撑结构的立体图;
28.图4为图1所示的植入物安装工具中连接部件的立体图;
29.图5为本实用新型第二实施例中植入物安装工具的示意图;
30.图6为图5所示的植入物安装工具中支撑主轴的局部立体图;
31.图7为图5所示的植入物安装工具中连接部件的立体图;
32.图8为本实用新型第三实施例中植入物安装工具的示意图;
33.图9为图8所示的植入物安装工具中支撑主轴的局部立体图;
34.图10为图8所示的植入物安装工具中连接部件的立体图;
35.图11为图1所示的植入物安装工具中操作结构与支撑主轴连接处的立体图;
36.图12为图11所示的操作结构中敲击柄的立体图。
37.其中:100、植入物安装工具;110、支撑结构;111、支撑主轴;1111、安装接口;1112、限位滑槽;1113、第一定位槽;112、安装组件;1121、转接轴; 1122、第一定位件;1123、锁紧套;1124、滑动部件;11241、定位滑套;11242、滑动弹性件;11243、第一限位件;1125、止挡部件;11251、限位套筒;11252、第二定位件;1126、第三定位件;120、操作结构;121、敲击柄;1211、配合孔;122、弹性连接组件;1221、敲击弹性件;1222、第二限位件;1223、第三限位件;130、连接部件;131、连接端;132、限位凸起;133、第二定位槽; 140、安装基座。
具体实施方式
38.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
39.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
40.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
41.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个
元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
42.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
43.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
44.参见图1、图5和图8,本实用新型提供一种植入物安装工具100。该植入物安装工具100应用于骨科手术机器人中,骨科手术机器人通过植入物安装工具100将植入物安装于骨骼中。可选地,骨骼手术机器人可以通过植入物安装工具100将植入物安装于患者的股骨中;当然,在本实用新型的其他实施方式中,骨科手术机器人也可通过植入物安装工具100将植入物安装到患者的其他骨骼中。
45.目前的安装工具为一体式结构,使用时,直接将植入物安装到安装工具的末端机械接口上,通过安装工具将植入物安装到植入位置。但是,不同骨科手术时所使用的植入物不同,相应的,所需末端机械接口的结构也存在差异,需要更换末端机械接口。这就需要对于不同接口的植入物更换整个安装工具,操作比较繁琐,且成本较高,不便于使用。
46.为此,本实用新型提供一种新型的植入物安装工具100。该植入物安装工具 100为可拆卸结构,能够适应不同类型的植入物,操作过程简单,适用范围广,便于操作人员使用。以下详细介绍植入物安装工具100的具体结构。
47.参见图1、图5和图8,在一实施例中,植入物安装工具100包括安装基座 140以及转动轴。安装基座140具有一通孔容纳腔。转动轴包括支撑结构110、操作结构120以及连接部件130。操作结构120安装于安装基座的通孔容纳腔中,操作结构120可拆卸设置于支撑结构110的一端,连接部件130的端部可拆卸设置于支撑结构110远离操作结构120的一端,连接部件130用于连接骨科手术机器人手术时的植入物。
48.也就是说,植入物安装工具100包括安装基座140和设置在安装基座140 上的转动轴形成。安装基座140起承载作用,用于承载植入物安装工具100的各个零部件,转动轴安装在安装基座140的通孔容纳腔中,建立安装基座140 与转动轴之间的连接关系,形成植入物安装工具100。
49.具体的,在转动轴中,支撑结构110用于支撑连接操作结构120与连接部件130。支撑结构110的一端安装操作结构120,支撑结构110的另一端安装连接部件130,使得连接部件130与操作结构120之间存在一定的间距。这样,当支撑结构110通过连接部件130作用于患者的骨骼时,能够在较远的位置操作,方便医护人员操作,提高使用时的舒适度。
50.操作结构120可拆卸设置在支撑结构110的一个端部。使用时可以将操作结构120直接安装在支撑结构110的端部,使用完成后,可以直接操作结构120 从支撑结构110的端
部拆卸下来。以此实现操作结构120的快装与快拆,便于操作人员使用。而且,操作结构120能够增加支撑结构110端部的面积,进而增加锤子等敲击部件与操作结构120的截面面积,使得敲击部件能够作用于操作结构120上,便于操作人员将植入物植入患者体内。
51.连接部件130的端部可拆卸的安装在支撑结构110的另一个端部。连接部件130可以连接骨科手术时的植入物。在进行骨科手术时,将连接部件130安装在支撑结构110后,直接将手术所需的植入物安装到连接部件130后,即可进行骨科手术,手术完成后,将连接部件130从植入物移出。
52.并且,由于不同的骨科手术所使用的植入物存在区别,连接部件130的具体结构也会存在一定的差异。所以,本实用新型中将连接部件130可拆卸安装在支撑结构110上。当需要使用其他类型的植入物时,更换相应的连接部件130,再将植入物安装于连接部件130上。
53.使用本实用新型的植入物安装工具100时,先根据骨科手术选择合适的连接部件130,再将连接部件130与操作结构120分别安装到支撑结构110的两端。然后,将植入物安装工具100安装在骨科手术机器人的机械臂上,通过机器人主机控制机械臂带动植入物安装工具100运动至植入位置,再通过锤子等敲击部件对操作结构120进行敲击以及转动支撑结构110带动连接部件130,以将植入物植入患者骨骼。
54.上述实施例的植入物安装工具100,通过连接部件130在支撑结构110的可拆卸安装,实现不同类型的连接部件130的更换,以适配不同类型的植入物,有效的解决目前末端机械接口不统一导致整体更换安装工具的问题,无需更换整体工具,当需要安装不同类型的植入物时,只需将连接部件130拆卸更换与植入物适配的连接部件130即可,简化操作步骤,适用范围广。同时,本实用新型的植入物安装工具100的结构简单,拆装便利,便于使用。
55.在一实施例中,支撑结构110包括支撑主轴111以及安装组件112,支撑主轴111具有与安装组件112可拆卸连接的安装接口1111,连接部件130设置在安装组件112,使支撑主轴111与连接部件130同步转动。
56.支撑主轴111为沿纵长方向延伸的杆状部件或管件,也就是说,支撑结构为为沿纵长方向延伸的杆状部件或管件。支撑主轴111的一端安装操作结构120,支撑主轴111的另一端具有安装接口1111,连接部件130通过安装组件112可拆卸的安装于安装接口1111中,在保证支撑主轴111与连接部件130连接可靠的同时,使得支撑主轴111能够与连接部件130同步转动,实现转矩的传递。连接部件130的端部可以直接安装于安装接口1111中,也可以间接安装于安装接口1111中。
57.参见图1至图4,在本实用新型的第一实施例中,连接部件130间接安装于安装接口1111中。连接部件130间接安装于安装接口1111时,连接部件130通过安装组件112可拆卸安装于安装接口1111中。这样,支撑轴能够通过安装组件112带动连接部件130同步转动,以实现扭矩传递到连接部件130上。
58.在一实施例中,安装组件112包括转接轴1121以及第一定位件1122,转接轴1121的一端安装于安装接口1111,转接轴1121具有与连接部件130连接的连接接口,第一定位件1122将转接轴1121固定于支撑主轴111。
59.转接轴1121用于实现连接部件130与支撑主轴111的转接连接。转接轴1121 的一端安装于安装接口1111,转接轴1121的另一端设置连接接口,连接部件130 的端部安装于连接接口中。也就是说,连接部件130通过转接轴1121安装在支撑主轴111。而且,转接轴
1121的端部通过第一定位件1122固定在支撑主轴111 上,避免转接轴1121与支撑主轴111发生相对转动,同时也可避免转接轴1121 脱离支撑主轴111。可选地,第一定位件1122为定位销。当然,在本实用新型的其他实施方式中,第一定位件1122还可为螺纹件等能够将转接轴1121固定在支撑主轴111的部件。
60.可选地,转接轴1121包括第一轴段以及连接第一轴段的第二轴段,第一轴段的截面尺寸与安装接口1111的截面尺寸相一致。第二轴段远离第一轴段的一端沿轴向方向开设连接接口,连接部件130的端部安装在安装接口1111中。可选地,第一轴段与第二轴段为一体结构,以保证转接轴1121的强度,进而保证转接轴1121工作的可靠性。可选地,第二轴段的截面尺寸大于第一轴段的截面尺寸。这样可以保证第二轴段的连接强度,使得第二轴段可靠的与连接部件130 连接。
61.可选地,第一轴段的截面形状为圆形、多边形或不规则形状等。相应的,安装接口1111的形状与第一轴段的截面形状相一致,以保证第一轴段能够安装于安装接口1111中。
62.可选地,连接接口与连接部件130的端部为过盈配合,或者通过螺纹连接固定。可选地,连接接口的截面形状为多边形或不规则形状,连接部件130的端部也为多边形或不规则形状。而且,为了避免连接部件130脱离支撑主轴111,安装组件112还包括锁紧套1123,通过锁紧套1123限制连接部件130的位移。可选地,连接部件130具有连接端131,连接端131的截面为多边形。
63.在一实施例中,安装组件112还包括锁紧套1123,锁紧套1123部分套设于转接轴1121与连接部件130的外侧,用于将连接部件130固定于转接轴1121。连接部件130安装在转接轴1121后,锁紧套1123可以与连接部件130的外壁连接,使得连接部件130固定在支撑主轴111上,避免连接部件130沿轴向方向窜动。而且,由于连接部件130的连接端131与转接轴1121的多边形的连接接口,能够保证支撑主轴111与连接部件130同步转动。
64.也就是说,通过连接部件130的连接端131与转接轴1121的连接接口的配合能够限制连接部件130的转动位移;通过锁紧套1123与连接部件130的连接实现连接部件130轴向位移的限制,避免连接部件130脱离支撑主轴111。通过多边形的连接端131以及锁紧套1123能够使得连接部件130可靠的通过转接轴 1121设置在支撑主轴111上,便于后期骨科手术时的植入物的安装。
65.可选地,锁紧套1123通过螺纹与连接部件130连接。连接部件130的外壁具有外螺纹,锁紧套1123的内壁具有内螺纹。锁紧套1123通过外螺纹与内螺纹的配合和连接部件130连接,限制连接部件130的轴向位移。当然,在本实用新型的其他实施方式中,锁紧套1123也可通过定位销或螺纹件等与连接部件 130连接,实现连接部件130轴向位移的限定。
66.参见图1,在本实施例中,将操作结构120安装在支撑主轴111的一端,将转接轴1121通过第一定位件1122固定在支撑主轴111的另一端的安装接口1111 中。再将锁紧套1123套在转接轴1121上。随后,将连接部件130的连接端131 安装于转接轴1121的连接接口中,并拧紧锁紧套1123,以固定连接部件130,完成植入物安装工具100的组装。随后可以进行骨科手术。
67.参见图5和图8,在本实用新型的第二实施例与第三实施例中,连接部件 130直接安装于安装接口1111时,安装组件可运动地套设于连接部件130与支撑主轴111的外侧,保证支撑主轴111与连接部件130的连接,并保证二者能同步转动。
68.在一实施例中,安装组件112包括止挡部件1125以及可滑动套设于支撑主轴111的滑动部件1124,滑动部件1124沿支撑主轴111滑动时,滑动部件1124 能够遮挡或露出安装接口1111,止挡部件1125用于对滑动部件1124露出安装接口1111的运动进行限位。
69.连接部件130的端部直接安装在支撑主轴111的安装接口1111中,安装接口1111能够对连接部件130的轴向以及周向进行限位。止挡部件1125固定设置在支撑主轴111上,用于起到限位作用。滑动部件1124可滑动设置在支撑主轴 111上,滑动部件1124滑动时滑动部件1124能够露出或遮挡支撑主轴111的安装接口1111。
70.滑动部件1124露出安装接口1111时,连接部件130的端部能够安装到安装接口1111中,或者从安装接口1111中拆卸。滑动部件1124遮挡安装接口1111 时,滑动部件1124能够限制连接部件130滑出安装接口1111。此时,连接部件 130的轴向位移以及周向转动被限制,使得连接部件130可靠的位于安装接口 1111中。支撑主轴111能够带动连接部件130移动与转动。当滑动部件1124露出安装接口1111时,滑动部件1124能够与止挡部件1125抵接,通过止挡部件 1125限制滑动部件1124的运动位移,避免滑动部件1124超行程运动,保证滑动部件1124的运动位移准确。
71.本实施例的植入物安装工具100装配时,先将操作结构120安装在支撑主轴111的一端,并使滑动部件1124沿支撑主轴111滑动,并与止挡部件1125抵接,以露出支撑主轴111的安装接口1111。随后,将连接部件130的端部安装到安装接口1111中,通过安装接口1111限制连接部件130的轴向位移与周向位移。再控制滑动部件1124沿支撑主轴111滑动,以使滑动部件1124遮挡安装接口1111,此时,滑动部件1124与连接部件130的端部抵接,限制连接部件130 滑出支撑主轴111。当需要更换连接部件130时,控制滑动组件滑动以露出安装接口1111,将连接部件130从安装接口1111中移出,更换另一连接部件130,再控制滑动部件1124滑动以遮挡安装接口1111即可,操作简单,便于使用。
72.在一实施例中,滑动部件1124包括第一限位件11243、滑动弹性件11242 以及定位滑套11241,定位滑套11241可滑动套设于支撑主轴111,支撑主轴111 上开设限位滑槽1112,第一限位件11243穿过定位滑套11241可滑动安装于滑槽中,滑动弹性件11242设置于定位滑套11241内,并与定位滑套11241的内壁以及止挡部件1125抵接。定位滑套11241压缩滑动弹性件11242时,定位滑套 11241能够露出安装接口1111;滑动弹性件11242的弹性力能够使定位滑套11241 遮挡安装接口1111。
73.定位滑套11241为中空的套筒结构,定位滑套11241可滑动套在支撑主轴 111上,定位滑套11241具有一定的轴向长度,这样,定位滑套11241能够遮挡安装接口1111。滑动弹性件11242设置在定位滑套11241的内部,并且,滑动弹性件11242的一端与定位滑套11241的内壁抵接,滑动弹性件11242的另一端与止挡部件1125抵接。定位滑套11241沿支撑主轴111滑动时,定位滑套11241 能够压缩或释放滑动弹性件11242,以露出或遮挡安装接口1111。
74.如图5和图8所示,外力作用于定位滑套11241,使得定位滑套11241沿图 5和图8所示向右滑动时,定位滑套11241能够压缩滑动弹性件11242,此时,定位滑套11241逐渐露出安装接口1111,实现连接部件130的安装与拆卸。当定位滑套11241的外力消失时,滑动弹性件11242的弹性力能够带动定位滑套 11241复位,使得定位滑套11241沿图5和图8所示方向向左滑动,此时,定位滑套11241能够遮挡安装接口1111,使得连接部件130可靠位于安装接
口1111 中。
75.可选地,定位滑套11241包括第一套筒以及第二套筒。第一套筒的内径大于第二套筒的内径,第一套筒内部安装滑动弹性件11242,第二套筒设置在第一套筒远离止挡部件1125的一端,第二套筒用于遮挡支撑主轴111的安装接口 1111。可选地,第一套筒与第二套筒为一体结构。
76.而且,在支撑主轴111上还设置与第一限位件11243配合的限位滑槽1112,通过第一限位件11243与限位滑槽1112的配合对定位滑套11241的滑动进行导向,使得定位滑套11241能够沿轴向方向滑动,避免定位滑套11241发生偏转。具体的,限位滑槽1112沿轴向方向设置在支撑主轴111的外壁,第一限位件 11243穿过定位滑套11241安装于限位滑槽1112中。定位滑套11241沿支撑主轴111滑动时,能够带动第一限位件11243在限位滑槽1112中滑动,使得定位滑套11241准确运动。
77.在一实施例中,止挡部件1125包括设置于支撑主轴111的限位套筒11251 以及将限位套筒11251固定于支撑主轴111的第二定位件11252,限位套筒11251 的端部伸入定位滑套11241内,并与滑动弹性件11242抵接,限位套筒11251 具有限位台阶,限位台阶能够对定位滑套11241限位。
78.限位套筒11251套设在支撑主轴111上,限位套筒11251的一端能够伸入定位滑套11241中,并与滑动弹性件11242抵接,用于对滑动弹性件11242进行限位,避免滑动弹性件11242位置窜动,保证定位滑套11241能够准确的压缩或释放滑动弹性件11242。限位套筒11251的外壁还具有限位台阶,定位滑套11241 沿支撑主轴111向右滑动时,定位滑套11241压缩滑动弹性件11242以逐渐露出安装接口1111。当定位滑套11241与限位套筒11251的限位台阶抵接时,表明定位滑套11241运动到位,此时,安装接口1111完全露出,可以将连接部件130 安装或拆卸。
79.而且,限位套筒11251通过第二定位件11252固定在支撑主轴111上,避免限位套筒11251沿轴向方向窜动,保证限位套筒11251可靠固定。可选地,第二定位件11252为定位销。当然,在本实用新型的其他实施方式中,第二定位件11252还可为螺纹件或者其他能够实现限位套筒11251固定的部件。
80.参见图5至图7,在本实用新型的第二实施例中,安装接口1111包括沿径向方向设置的限位槽,连接部件130的端部具有限位凸起132,限位凸起132沿径向方向拆装于限位槽。连接部件130通过限位凸起132安装在限位槽后,能够限制连接部件130的轴向位移与周向位移。
81.本实施例的植入物安装工具100装配时,先将操作结构120安装在支撑主轴111的一端,并将定位滑套11241压缩弹簧以沿左侧向限位套筒11251滑动,当定位滑套11241抵接限位套筒11251的限位台阶时,支撑主轴111端部的安装接口1111露出,可以安装连接部件130。随后松开定位滑套11241,滑动弹性件 11242的弹性力能够带动定位滑套11241复位,以遮挡安装接口1111,完成植入物安装工具100的组装。随后可以进行骨科手术。
82.参见图8至图10,在本实用新型的第三实施例中,安装接口1111为内螺纹接口,连接部件130的端部具有与内螺纹接口配合的外螺纹。也就是说,连接部件130通过外螺纹与内螺纹的配合安装到安装接口1111中,能够限制连接部件130的轴向位移与周向位移。可选地,安装接口1111为具有外螺纹的凸起,连接部件130具有螺纹孔。
83.在一实施例中,安装组件112还包括第三定位件1126,支撑主轴111的外壁开设第一定位槽1113,连接部件130的外壁开设第二定位槽133,第一定位槽1113与第二定位槽133对应设置,定位滑套11241的外壁开设连通第一定位槽1113与第二定位槽133的第三定位槽,第三定位件1126穿过第三定位槽安装于位于第一定位槽1113与第二定位槽133中。
84.连接部件130安装于安装槽后,第三定位件1126部分位于连接部件130的第一定位槽1113中,部分位于支撑主轴111的第二定位槽133中,第三定位件 1126能够限制连接部件130的周向转动,起到螺纹防松的作用。可选地,第三定位件1126为定位键。第三定位件1126通过过盈配合防松与第一定位槽1113 及第二定位槽133连接。当然,在本实用新型的其他实施方式中,第三定位件 1126还可为定位销或者其他能够避免螺纹松动的部件。
85.本实施例的植入物安装工具100装配时,先将操作结构120安装在支撑主轴111的一端,并将定位滑套11241压缩弹簧以沿左侧向限位套筒11251滑动,当定位滑套11241抵接限位套筒11251的限位台阶时,支撑主轴111端部的安装接口1111露出,可以安装连接部件130。随后松开定位滑套11241,滑动弹性件 11242的弹性力能够带动定位滑套11241复位,以遮挡安装接口1111;再将第三定位件1126安装到第一安装槽与第二安装槽中,完成植入物安装工具100的组装。随后可以进行骨科手术。
86.参见图1、图11和图12,在一实施例中,操作结构120包括敲击柄121以及弹性连接组件122,敲击柄121具有配合孔1211,敲击柄121通过配合孔1211 安装于支撑主轴111远离连接部件130的端部,支撑主轴111具有沿径向方向设置的安装孔,弹性连接组件122设置于安装孔中,并伸出安装孔与配合孔1211 的内壁抵接。
87.敲击柄121与支撑主轴111通过配合孔1211配合,配合孔1211安装在支撑主轴111的端部。敲击柄121通过配合孔1211安装于支撑主轴111的端部后,支撑主轴111的安装孔位于敲击柄121的配合孔1211中。弹性连接组件122设置于安装孔后,弹性连接组件122的弹性力会使得弹性连接组件122的端部伸出安装孔,并与配合孔1211的内壁抵接,以此限制敲击柄121的位置,使得敲击柄121固定在支撑主轴111上。
88.在一实施例中,弹性连接组件122包括敲击弹性件1221以及第二限位件 1222,敲击弹性件1221设置于安装孔中,敲击弹性件1221与第二限位件1222 连接,并使敲击弹性件1221与配合孔1211的内壁抵接。配合孔1211的内壁具有安装槽,安装槽用于安装第二限位件1222的端部。
89.敲击弹性件1221设置于安装孔中,敲击弹性件1221的一端与安装孔的内壁连接,敲击弹性件1221的另一端与第二限位件1222连接。敲击弹性件1221 的弹性力能够使得第二限位件1222的端部露出安装孔。可选地,第二限位件1222 为钢珠。
90.安装敲击柄121时,配合孔1211的内壁能够与第二限位件1222抵接,并压缩敲击弹性件1221,当第二限位件1222运动至安装槽后,敲击弹性件1221 的弹性力能够将第二限位件1222顶在安装槽中,实现敲击柄121的固定。拆卸敲击柄121时,通过对敲击柄121施加外力,使得第二限位件1222移出安装槽,随后可以将敲击柄121从支撑主轴111拆卸。
91.在一实施例中,弹性连接组件122还包括第三限位件1223,第三限位件1223 设置于安装孔中,第三限位件1223对敲击弹性件1221远离第二限位件1222的端部进行限位。也就是说,敲击弹性件1221在安装孔中一端与第三限位件1223 连接,另一端与第二限位件1222连接。可选地,第三限位件1223为定位销。
92.在一实施例中,支撑主轴111的端部具有第一导向面,配合孔1211的内壁具有与第一导向面配合的第二导向面,第一导向面与第二导向面用于引导支撑主轴111安装于敲击柄121中。第一导向面与第二导向面为倾斜面,能够便于敲击柄121与支撑主轴111安装,第一导向面为支撑主轴111边缘的倒角结构,第二导向面能够使得配合孔1211形成扩口结构。同时,第二导向斜面还能便于第二限位件1222滑入配合孔1211中。
93.上述实施例的植入物安装工具100,通过连接部件130在支撑主轴111的可拆卸安装,实现不同类型的连接部件130的更换,以适配不同类型的植入物,无需更换整体工具,当需要安装不同类型的植入物时,只需将连接部件130拆卸更换与植入物适配的连接部件130即可,简化操作步骤,适用范围广。同时,本实用新型的植入物安装工具100的占用空间小,结构简单,拆装便利,便于使用。
94.本实用新型还提供一种骨科手术机器人,包括机器人主体、设置于机器人主体的机械臂以及上述实施例中的植入物安装工具100。植入物安装工具100用于安装植入物,并设置于机械臂中,机械臂带动植入物安装工具100执行骨科手术。本实用新型的骨科手术机器人采用上述实施例的植入物安装工具100后,能够适配不同类型的植入物,满足不同情况的手术需求。而且,通过机器人主体还能经植入物安装工具100还能实时检测植入物的位置,提高植入物的安装精度和成功几率。
95.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
96.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1