一种仿生手的拇指结构的制作方法
1.本实用新型具体是一种仿生手的拇指结构,涉及仿生手相关领域。
背景技术:
2.仿生手作为现如今解决病人截肢后生活自理的主要手段,仍是一个较为新兴热门的产品,市场上产品种类参差不齐,行业中尚未有对此类产品明确的要求和标准,在仿生手上需要安装有五组手指组件,而拇指结构也是不可少的。
3.在现有的仿生手的拇指结构进行实际使用过程中,拇指关节活动位置较少,导致抓取时稳定性较低,并且对于活动位置大多为暴露,受外力容易造成损坏,影响使用。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种仿生手的拇指结构。
5.本实用新型是这样实现的,构造一种仿生手的拇指结构,该装置包括驱动电机,所述驱动电机输出端与摆动件相接,所述驱动电机一端通过锥齿轮传动组件与连杆相接,所述锥齿轮传动组件另一端与驱动马达相连接,所述连杆另一端与指尖结构相连接,所述摆动件和指尖结构底部与防护面层相接,所述指尖结构包括传动结构、连接块、波纹管、压块和接触块,所述传动结构后端与摆动件进行铰接,所述传动结构顶部通过连接块与连杆相铰接,所述传动结构前端通过波纹管与压块相接,所述压块底部设有接触块。
6.优选的,所述传动结构包括壳体、步进电机、收卷轮、拉带和摆动臂,所述壳体内后端安装有步进电机,所述步进电机输出轴与收卷轮相接,所述收卷轮外侧与拉带相连接,所述拉带另一端与压块内后端固定,所述压块内后端中部通过摆动臂与壳体内侧进行铰接。
7.优选的,所述接触块包括衔接层、插杆、橡胶层和防护层,所述衔接层后端固定有插杆,所述插杆背面与压块相接,所述衔接层前端通过橡胶层与防护层相接。
8.优选的,所述防护面层包括接触面层、粘黏条、泡沫层和硅胶层,所述接触面层顶部与摆动件以及指尖结构底部相贴合,所述粘黏条设于接触面层两端,并且接触面层顶部与摆动件以及指尖结构底部进行粘接,所述接触面层底部贴合有泡沫层,所述泡沫层底部与硅胶层进行固定。
9.优选的,所述波纹管最大拉伸长度为未拉伸状态下的三倍。
10.优选的,所述压块内下端开设有两组插槽,并且所述插杆紧密插入至插槽内部。
11.优选的,所述拉带具有弹性,并且拉带宽度小于收卷轮厚度。
12.优选的,所述防护层由高强度纤维交错编织而成,并且防护层固定在橡胶层底部。
13.优选的,所述波纹管采用pvc塑料材质。
14.优选的,所述压块采用不锈钢材质。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种仿生手的拇指结构,与同类型设备相比,具有如下改进:
16.本实用新型所述一种仿生手的拇指结构,在摆动件底部到指尖结构底部位置设置
有防护面层,防护面层可对两端活动位置进行防护,在防护面层内部的接触面层与活动位置相贴,由粘黏条进行固定,在接触面层底部分别设有泡沫层和硅胶层,缓冲性、吸能性强,便于在受外力时对活动位置进行防护;在指尖结构内设有传动结构,传动结构由独立电机驱动,驱动下可实现指尖位置的压块进行摆动,更便于对物件的抓取;压块底部设有接触块,接触块内部设有橡胶层,具有缓冲作用,以及橡胶层底部设有高强度纤维编织的防护层,可在接触物件时配合橡胶层提供稳定的摩擦力,防止偏移。
附图说明
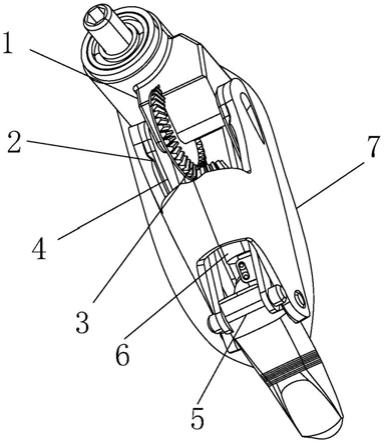
17.图1是本实用新型结构示意图;
18.图2是本实用新型指尖结构示意图;
19.图3是本实用新型传动结构内部示意图;
20.图4是本实用新型接触块结构示意图;
21.图5是本实用新型防护面层结构示意图。
22.其中:驱动电机
‑
1、摆动件
‑
2、锥齿轮传动组件
‑
3、连杆
‑
4、指尖结构
‑
5、驱动马达
‑
6、防护面层
‑
7、传动结构
‑
51、连接块
‑
52、波纹管
‑
53、压块
‑
54、接触块
‑
55、壳体
‑
511、步进电机
‑
512、收卷轮
‑
513、拉带
‑
514、摆动臂
‑
515、衔接层
‑
551、插杆
‑
552、橡胶层
‑
553、防护层
‑
554、接触面层
‑
71、粘黏条
‑
72、泡沫层
‑
73、硅胶层
‑
74。
具体实施方式
23.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1,本实用新型通过改进在此提供一种仿生手的拇指结构,包括驱动电机1,驱动电机1输出端与摆动件2相接,驱动电机1一端通过锥齿轮传动组件3与连杆4相接,锥齿轮传动组件3另一端与驱动马达6相连接,连杆4另一端与指尖结构5相连接,摆动件2和指尖结构5底部与防护面层7相接。
25.请参阅图2,本实用新型通过改进在此提供一种仿生手的拇指结构,指尖结构5包括传动结构51、连接块52、波纹管53、压块54和接触块55,传动结构51后端与摆动件2进行铰接,传动结构51顶部通过连接块52与连杆4相铰接,传动结构51前端通过波纹管53与压块54相接,压块54底部设有接触块55,波纹管53最大拉伸长度为未拉伸状态下的三倍,形变效果好,覆盖稳定,波纹管53采用pvc塑料材质,强度高,耐久性强,压块54内下端开设有两组插槽,并且插杆552紧密插入至插槽内部,拆装方便,快捷,压块54采用不锈钢材质,防止长期使用导致锈化。
26.请参阅图3,本实用新型通过改进在此提供一种仿生手的拇指结构,传动结构51包括壳体511、步进电机512、收卷轮513、拉带514和摆动臂515,壳体511内后端安装有步进电机512,步进电机512输出轴与收卷轮513相接,收卷轮513外侧与拉带514相连接,拉带514另一端与压块54内后端固定,压块54内后端中部通过摆动臂515与壳体511内侧进行铰接,拉带514具有弹性,并且拉带514宽度小于收卷轮513厚度,便于进行有效的复位。
27.请参阅图4,本实用新型通过改进在此提供一种仿生手的拇指结构,接触块55包括衔接层551、插杆552、橡胶层553和防护层554,衔接层551后端固定有插杆552,插杆552背面与压块54相接,衔接层551前端通过橡胶层553与防护层554相接,防护层554由高强度纤维交错编织而成,并且防护层554固定在橡胶层553底部,摩擦力大,稳定。
28.请参阅图5,本实用新型通过改进在此提供一种仿生手的拇指结构,防护面层7包括接触面层71、粘黏条72、泡沫层73和硅胶层74,接触面层71顶部与摆动件2以及指尖结构5底部相贴合,粘黏条72设于接触面层71两端,并且接触面层71顶部与摆动件2以及指尖结构5底部进行粘接,接触面层71底部贴合有泡沫层73,泡沫层73底部与硅胶层74进行固定。
29.本实用新型通过改进提供一种仿生手的拇指结构,其工作原理如下;
30.第一,当需要对拇指结构进行使用时,首先将驱动电机1安装到仿生手掌上,接着再通过连接线与拇指结构进行连接,即可为其工作提供所需的电能,并且能对其进行有效的控制;
31.第二,启动驱动电机1开始进行工作,可带动摆动件2进行摆动运动,若需要带动前端指尖结构5进行运动时,启动驱动马达6工作,带动锥齿轮传动组件3进行转动,然后即可通过连杆4对指尖结构5进行拉动;
32.第三,需要对指尖结构5前端指尖位置进行摆动时,使用者启动步进电机512工作,步进电机512带动收卷轮513进行转动,然后收卷轮513转动过程中使得拉带514进行运动,即可对压块54进行拉动,需要复位时,只需要启动步进电机512反转,在拉带514弹力作用下,使得压块54进行复位;
33.第四,而压块54底部设有接触块55,接触块55内部设有橡胶层553,具有缓冲作用,以及橡胶层553底部设有高强度纤维编织的防护层554,可在接触物件时配合橡胶层553提供稳定的摩擦力,防止偏移;
34.第五,而摆动件2底部到指尖结构5底部位置设置有防护面层7,防护面层7可对两端活动位置进行防护,在防护面层7内部的接触面层71与活动位置相贴,固定由粘黏条72进行连接,在接触面层71底部分别设有泡沫层73和硅胶层74,缓冲性好,吸能性强,便于在受外力时对活动位置进行防护。
35.本实用新型通过改进提供一种仿生手的拇指结构,摆动件2底部到指尖结构5底部位置设置有防护面层7,防护面层7可对两端活动位置进行防护,在防护面层7内部的接触面层71与活动位置相贴,由粘黏条72进行固定,在接触面层71底部分别设有泡沫层73和硅胶层74,缓冲性好,吸能性强,便于在受外力时对活动位置进行防护;在指尖结构5内设有传动结构51,传动结构51由独立电机驱动,驱动下可实现指尖位置的压块54进行摆动,增加活动位置,更便于对物件的抓取;压块54底部设有接触块55,接触块55内部设有橡胶层553,具有缓冲作用,以及橡胶层553底部设有高强度纤维编织的防护层554,可在接触物件时配合橡胶层553提供稳定的摩擦力,防止偏移。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1