一种医疗康复用辅助装备
1.本实用新型涉及医疗设备技术领域,具体地,涉及一种医疗康复用辅助装备。
背景技术:
2.行动不便的人员(包括因脊柱脊髓损伤、肥胖、肌肉萎缩等造成的行动不便)在进行康复训练时,往往需要为其提供足够的支撑,才能够顺利行走等训练。
3.目前,针对此类人员的康复训练,大都采用人工搀扶的方式或提供一个简易的走行小车等为康复训练人员提供支撑力。此种方式因搀扶人员的力量原因或因康复训练人员手部力量过小/不稳等原因,容易造成安全隐患。
技术实现要素:
4.本实用新型的目的在于针对现有技术中的不足,提供一种医疗康复用辅助装备。
5.为实现上述目的,本实用新型提供了一种医疗康复用辅助装备,包括机架、支撑杆、走行轮和吊臂组件;所述机架包括上臂、连接臂和下臂,所述上臂的一端与连接臂的上端固连,上臂的另一端沿水平方向自由延伸并与吊臂组件相连,所述连接臂的下端与下臂的一端固连,所述下臂的另一端上安装有走行轮;所述支撑杆的一端上安装有辅助轮,另一端与机架相连且设置于连接臂与下臂的连接位;所述走行轮通过第一驱动件进行驱动;所述吊臂组件包括与上臂的延伸端固连的连接环和设置于连接环上的吊臂。
6.优选的,所述连接臂与下臂采用倾斜设置,且连接臂与下臂均设置为中空结构。
7.优选的,所述第一驱动组件包括第一直齿、第二直齿、第一传动轴、第一支撑轴和第一电机,所述第一电机的驱动端通过联轴器与第一传动轴相连,第一传动轴上连接有第一直齿,第二直齿与第一直齿啮合连接,且第二直齿通过第一支撑轴与下臂相连。
8.优选的,所述机架上还设有用于驱动支撑杆摆动的第二驱动组件,所述第二驱动组件设置为斜齿传动结构,且其包括第一斜齿、第二斜齿、第二传动轴、第二支撑轴和第二电机,所述第二电机的驱动端通过联轴器与第二传动轴相连,第二传动轴上连接有第一斜齿,第二斜齿与第一斜齿啮合连接,且第二斜齿通过第二支撑轴与连接臂相连。
9.优选的,所述支撑杆设置为u形结构。
10.优选的,所述连接环上设有滑移凹槽,所述吊臂上设有滑移件,所述滑移件安装于滑移凹槽内并可进行360度滑移。
11.优选的,所述吊臂采用柔性材料制作而成,且吊臂设置为u形结构。
12.一种医疗康复用辅助装备,还包括控制机构,所述控制机构与第一驱动组件和第二驱动组件相连,且其设置于机架上。
13.优选的,所述控制机构包括设置于机架上的控制面板和与控制面板无线连接的遥控器。
14.与现有技术相比,本实用新型具有以下有益效果:
15.(1)本实用新型通过设置吊臂组件,使康复人员能够通过穿过吊臂组件增加在康
复训练过程中的安全性,并通过第一驱动组件对走行轮的驱动,以避免康复人员手部无力等原因而造成无法顺利行走的问题。
16.(2)本实用新型中通过将连接臂与下臂采用倾斜的方式设置,以有效减小走行轮运行过程中的阻力。
17.(3)本实用新型中通过将第二驱动组件设置为斜齿传动结构,使其能够自动调节支撑杆的高度,从而控制支撑杆与地面进行支撑或远离地面便于走行轮的行走。
18.(4)本实用新型中通过将支撑杆设置为u形结构,使其支撑平稳。
19.(5)本实用新型中通过将吊臂设置成可在连接环上360度滑移的结构,以通过其能够灵活转动减少对康复训练人员的活动阻力。
20.(6)本实用新型中通过设置控制机构,使其能够对走行机构的行走速度、支撑杆的摆动进行控制,实现自动化。
21.(7)本实用新型中通过设置遥控器,以便康复训练的人员能够有效、便携的操作。
22.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
23.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
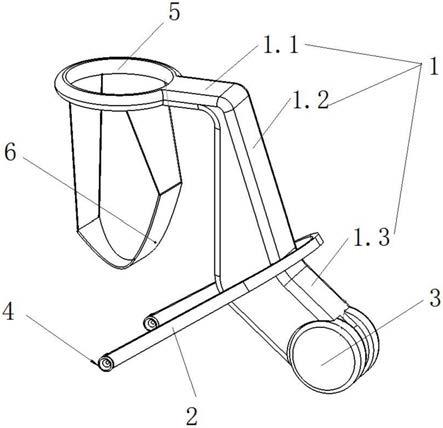
24.图1是本实用新型实施例中医疗康复用辅助装备的轴测示意图;
25.图2是图1的主视剖面示意图;
26.图3是图1的后视剖面示意图。
27.其中:
28.1、机架,1.1、上臂,1.2、连接臂,1.3、下臂,2、支撑杆,3、走行轮,4、辅助轮,5、连接环,6、吊臂,7、第一直齿,8、第二直齿,9、第一传动轴,10、第一支撑轴,11、第一电机,12、第一斜齿,13、第二斜齿,14、第二传动轴,15、第二支撑轴,16、第二电机。
具体实施方式
29.为使本实用新型的上述目的、特征和优点等能够更加明确易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。需说明的是,本实用新型附图均采用简化的形式且均使用非精确比例,仅用以方便、清晰地辅助说明本实用新型实施;本实用新型中所提及的若干,并非限于附图实例中具体数量;本实用新型中所提及的
‘
前
’‘
中
’‘
后
’‘
左
’‘
右
’‘
上
’‘
下
’‘
顶部
’‘
底部
’‘
中部’等指示的方位或位置关系,均基于本实用新型附图所示的方位或位置关系,而不指示或暗示所指的装置或零部件必须具有特定的方位,亦不能理解为对本实用新型的限制。
30.本实施例:
31.参见图1所示,一种医疗康复用辅助装备,包括机架1、支撑杆2、走行轮3和吊臂组件;所述机架1包括上臂1.1、连接臂1.2和下臂1.3,所述上臂1.1的一端与连接臂1.2的上端固连,上臂1.1的另一端沿水平方向自由延伸并与吊臂组件相连,所述连接臂1.2的下端与
下臂1.3的一端固连,所述下臂1.3的另一端上安装有走行轮3;所述支撑杆2的一端上安装有辅助轮4,另一端与机架1相连且设置于连接臂1.2与下臂1.3的连接位;所述走行轮3通过第一驱动件进行驱动;所述吊臂组件包括与上臂1.1的延伸端固连的连接环5和设置于连接环5上的吊臂6。
32.优选的,所述连接臂1.2与下臂1.3采用倾斜设置,且连接臂1.2与下臂1.3均设置为中空结构。
33.优选的,所述第一驱动组件包括第一直齿7、第二直齿8、第一传动轴9、第一支撑轴10和第一电机11,所述第一电机11的驱动端通过联轴器与第一传动轴9相连,第一传动轴9上连接有第一直齿7,第二直齿8与第一直齿7啮合连接,且第二直齿8通过第一支撑轴10与下臂1.3相连。
34.优选的,所述机架1上还设有用于驱动支撑杆2摆动的第二驱动组件,所述第二驱动组件设置为斜齿传动结构,且其包括第一斜齿12、第二斜齿13、第二传动轴14、第二支撑轴15和第二电机16,所述第二电机16的驱动端通过联轴器与第二传动轴14相连,第二传动轴14上连接有第一斜齿12,第二斜齿13与第一斜齿12啮合连接,且第二斜齿13通过第二支撑轴15与连接臂1.2相连。
35.优选的,所述支撑杆2设置为u形结构。
36.优选的,所述连接环5上设有滑移凹槽,所述吊臂6上设有滑移件,所述滑移件安装于滑移凹槽内并可进行360度滑移。
37.优选的,所述吊臂6采用柔性材料制作而成,且吊臂6设置为u形结构。
38.一种医疗康复用辅助装备,还包括控制机构,所述控制机构与第一驱动组件和第二驱动组件相连,且其设置于机架1上。
39.优选的,所述控制机构包括设置于机架1上的控制面板和与控制面板无线连接的遥控器。
40.应用上述医疗康复用辅助装备进行康复训练的过程具体如下:
41.1)康复人员因腰脊损伤或过渡肥胖造成的行动不便进行走行康复训练时,则将吊臂穿过康复人员并绑于康复人员的腰部,以为康复人员提供支撑力;
42.2)启动第二驱动组件,以调节支撑杆与地面的相对夹角;
43.3)启动第一驱动组件使该医疗康复用辅助装备行走,以为康复人员提供辅助牵引力,达到康复训练的目的(也可根据康复人员的训练需求,不启动第一驱动组件,通过康复人员自身的推力使该医疗康复用辅助装备行走,以达到增加康复训练的目的)。
44.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1