急诊气管插管治疗车的制作方法
1.本实用新型属于急救装置技术领域,尤其涉及一种急诊气管插管治疗车。
背景技术:
2.紧急气管插管技术是急救工作中最常用的、最重要的抢救技术之一,往往是分秒必争,其速度直接关系着抢救的成功与否及患者的预后情况;气管插管所需用物多,至少14-18种,品种杂,既有药品又有器械,既有无菌物品又有非无菌物品,备物时间长,平均3-4分钟,而在抢救情况下,容易出现遗漏物品及准备用物时间过长的现象,不利于抢救;现有技术存在治疗车由于物品不便于收纳且智能化程度低,从而不利于急救和抢救的问题。
技术实现要素:
3.本实用新型提供一种急诊气管插管治疗车,以解决上述背景技术中提出现有技术存在治疗车由于物品不便于收纳且智能化程度低,从而不利于急救和抢救的问题。
4.本实用新型所解决的技术问题采用以下技术方案来实现:一种急诊气管插管治疗车,包括具有车轮的治疗车本体,所述治疗车本体上表面通过伸缩板设置上盖,其两侧分别设置扶手,所述治疗车本体的内上半部纵向分布气管导管分类格、导丝格、药品格、注射器格、咽喉镜格,其内下半部横向按层分布口咽通气道抽屉、人工呼吸器抽屉、经皮气管切开套管抽屉、物品盘点登记本抽屉、气管切开套管抽屉、相关辅助物品抽屉。
5.进一步,所述治疗车还包括远程控制系统,所述远程控制系统包括智能控制模块,所述智能控制模块包括方向识别模块,所述方向识别模块感应输出于治疗车控制模块,所述治疗车控制模块控制输出于车轮驱动模块,所述治疗车控制模块的一输入端连接于开锁选择模块和过期报警模块,其一输出端经本地传输模块与远程传输模块的数据交互连接于远程控制模块,所述远程控制系统通过电源供给模块供电。
6.进一步,所述远程控制系统包括治疗车控制单元a200,所述治疗车控制单元a200输入端依次连接于前方向识别单元a100、后方向识别单元a101、左方向识别单元a102、右方向识别单元a103,所述治疗车控制单元a200输出端依次连接于前左车轮驱动单元a400、前右车轮驱动单元a401、后左车轮驱动单元a402、后右车轮驱动单元a403以及本地传输单元a500和过期报警单元a600。
7.进一步,所述前左车轮驱动单元a400、前右车轮驱动单元a401、后左车轮驱动单元a402、后右车轮驱动单元a403均包括车轮驱动电路,所述车轮驱动电路包括:
8.车轮驱动器u4001,所述车轮驱动器u4001输入端连接于治疗车控制单元a200的一输出端,所述车轮驱动器u4001输出端连接于快速二极管d4001的正极和直流电机m4000输入端,所述直流电机m4000的输出端连接于快速二极管d4002的负极并接地,所述快速二极管d4001的负极接12v电源,所述快速二极管d4002的负极接地,所述12v电源经退耦电容c4003和退耦电容c4004接地,vcc电源通过退耦电容c4001和退耦电容c4002接地。
9.进一步,所述前方向识别单元a100、后方向识别单元a101、左方向识别单元a102、
右方向识别单元a103均包括方向识别电路,所述方向识别电路包括:
10.三极管q1001,所述三极管q1001的基极经电阻r1001接vcc电源,所述三极管q1001的集电极经可调电阻ar1001接vcc电源,所述三极管q1001的发射极经接地,所述三极管q1001的集电极经电阻r1002输出于治疗车控制单元a200的一输入端。
11.进一步,所述本地传输单元a500包括蓝牙传输模组u5001,所述蓝牙传输模组u5001的串行输入端连接于治疗车控制单元a200的一输出端,并经退耦电容c5001和退耦电容c5002接地,所述蓝牙传输模组u5001的输出端经传输天线y5001远程传输。
12.进一步,所述电源供给模块包括稳压片u7001和稳压片u7002,所述稳压片u7001和稳压片u7002的相应的输入端共同连接于acc总电源,所述稳压片u7001的输出端通过退耦电容c7003连接于输出vcc电源,所述稳压片u7002的输出端通过退耦电容c7004连接于输出12v电源。
13.进一步,所述过期报警单元a600包括过期报警电路,所述过期报警电路包括:
14.三极管q6001,所述三极管q6001的基极经电阻r6001连接于治疗车控制单元a200的一输出端,所述三极管q6001的集电极通过报警器l6001连接于vcc电源,所述三极管q6001的发射极接地。
15.进一步,所述治疗车控制单元a200包括开锁选择子单元,所述开锁选择子单元包括开锁选择电路,所述开锁选择电路包括:
16.按钮s2001、按钮s2002、按钮s2003、按钮s2004,所述按钮s2001、按钮s2002、按钮s2003、按钮s2004的相应的接地端接地,其相应的输出端分别通过上拉电阻r2001、上拉电阻r2002、上拉电阻r2003、上拉电阻r2004分别输出至治疗车控制单元a200的相应的输入端。
17.进一步,所述远程控制模块包括远程控制电路,所述远程控制电路包括:
18.蓝牙传输模组u8001,所述蓝牙传输模组u8001的串行输出端连接于远程控制器u8002的一输入端,所述蓝牙传输模组u5001的输入端经传输天线y8001远程传输,并经退耦电容c8001和退耦电容c8002接地。
19.本实用新型的有益效果为:
20.1、本专利采用具有车轮的治疗车本体,所述治疗车本体上表面通过伸缩板设置上盖,其两侧分别设置扶手,所述治疗车本体的内上半部纵向分布气管导管分类格、导丝格、药品格、注射器格、咽喉镜格,其内下半部横向按层分布口咽通气道抽屉、人工呼吸器抽屉、经皮气管切开套管抽屉、物品盘点登记本抽屉、气管切开套管抽屉、相关辅助物品抽屉,由于急诊气管插管车,由上盖、扶手、伸缩板、气管导管分类格、导丝格、药品格、注射器格、咽喉镜格、口咽通气道抽屉、人工呼吸器抽屉、经皮气管切开套管抽屉、物品盘点登记本抽屉、气管切开套管抽屉、相关辅助物品抽屉以及车轮组成,它能够使物品放置整齐、型号齐全,利于物品的清点和补充,保证无菌物品的有效期,从而为紧急气管插管抢救赢得时间,保证患者的安全。
21.2、本专利采用所述治疗车还包括远程控制系统,所述远程控制系统包括智能控制模块,所述智能控制模块包括方向识别模块,所述方向识别模块感应输出于治疗车控制模块,所述治疗车控制模块控制输出于车轮驱动模块,所述治疗车控制模块的一输入端连接于开锁选择模块和过期报警模块,其一输出端经本地传输模块与远程传输模块的数据交互
连接于远程控制模块,所述远程控制系统通过电源供给模块供电,由于治疗车的姿态完全交由单片机控制,当然其控制策略会根据传感器的输入信号而有所不同;传统治疗车一般由人推行,由于车体较重,对于力气较小的医务人员,容易推偏或撞车,本系统在原有基础上治疗车基础上增加助力功能,方便了医务人员的推行操作,由于避障与寻迹的原理相同,只是姿态调整策略和传感器的形式不同,为了操作简单,并考虑到避障功能展示时较为方便,所以只计划实现该功能。避障传感器采用红外光电反射传感器模块,该模块由一对红外发射和接收管组成,可以通过电位器调整测量距离。这里采用的姿态调整策略为当遇到障碍时,根据传感器传送的障碍的来源方向及时调整车轮的方向和运行角度,从而避免了撞车和推偏的情况发生,同时减轻了医务人员的工作负担。
22.3、本专利采用所述远程控制系统包括治疗车控制单元a200,所述治疗车控制单元a200输入端依次连接于前方向识别单元a100、后方向识别单元a101、左方向识别单元a102、右方向识别单元a103,所述治疗车控制单元a200输出端依次连接于前左车轮驱动单元a400、前右车轮驱动单元a401、后左车轮驱动单元a402、后右车轮驱动单元a403以及本地传输单元a500和过期报警单元a600,由于控制器从四个方向判断障碍物方向,当四个方向之一有障碍物时,则立即反馈至控制器,控制器得到反馈,根据障碍物方向响应反馈,从而调整车轮的运行方向增加助力,从而保证车轮正常的行驶轨迹的姿态。
23.4、本专利采用车轮驱动器u4001,所述车轮驱动器u4001输入端连接于治疗车控制单元a200的一输出端,所述车轮驱动器u4001输出端连接于快速二极管d4001的正极和直流电机m4000输入端,所述直流电机m4000的输出端连接于快速二极管d4002的负极并接地,所述快速二极管d4001的负极接12v电源,所述快速二极管d4002的负极接地,所述12v电源经退耦电容c4003和退耦电容c4004接地,vcc电源通过退耦电容c4001和退耦电容c4002接地,由于单片机输出控制信号控制片选信号,并输出响应的pwm控制波形至驱动器ln298,驱动器得到控制信号,输出至车轮电机,车轮电机带动车轮做同步运行。
24.5、本专利采用三极管q1001,所述三极管q1001的基极经电阻r1001接vcc电源,所述三极管q1001的集电极经可调电阻ar1001接vcc电源,所述三极管q1001的发射极经接地,所述三极管q1001的集电极经电阻r1002输出于治疗车控制单元a200的一输入端,由于识别电路采用红外传感器d1001,当有障碍物时,红外传感器导通,三极管导通,集电极呈低电平,并输出低电平信号,当障碍物消失时,红外传感器不导通,三极管不导通,集电极呈高电平,并输出高电平信号,从而识别障碍物。
25.6、本专利采用所述本地传输单元a500包括蓝牙传输模组u5001,所述蓝牙传输模组u5001的串行输入端连接于治疗车控制单元a200的一输出端,并经退耦电容c5001和退耦电容c5002接地,所述蓝牙传输模组u5001的输出端经传输天线y5001远程传输,由于采用蓝牙传输模组进行传输,保证了信息传输的可靠性。
26.7、本专利采用所述电源供给模块包括稳压片u7001和稳压片u7002,所述稳压片u7001和稳压片u7002的相应的输入端共同连接于acc总电源,所述稳压片u7001的输出端通过退耦电容c7003连接于输出vcc电源,所述稳压片u7002的输出端通过退耦电容c7004连接于输出12v电源,本系统电源采用双电源,当系统供电时,采用vcc电源的数字电源,当对外供电时,驱动车轮运行,采用12v驱动电源。
27.8、本专利采用过期报警单元a600包括过期报警电路,所述过期报警电路包括三极
管q6001,所述三极管q6001的基极经电阻r6001连接于治疗车控制单元a200的一输出端,所述三极管q6001的集电极通过报警器l6001连接于vcc电源,所述三极管q6001的发射极接地,由于各个抽屉可设计有效期报警系统,可设定无菌物品有效期,在接近有效期1-2周可报警提醒,以便及时更换新的物品或药品。
28.9、本专利采用所述治疗车控制单元a200包括开锁选择子单元,所述开锁选择子单元包括开锁选择电路,所述开锁选择电路包括按钮s2001、按钮s2002、按钮s2003、按钮s2004,所述按钮s2001、按钮s2002、按钮s2003、按钮s2004的相应的接地端接地,其相应的输出端分别通过上拉电阻r2001、上拉电阻r2002、上拉电阻r2003、上拉电阻r2004分别输出至治疗车控制单元a200的相应的输入端,由于按钮组采用矩阵方式连接,对治疗车的开箱可设定不同的组合,如按钮s2001+按钮s2002......等,若设定其中的一种组合,当开箱时必须同时按下两个按钮,才能有效开锁,这样的操作,避免了误操作,同时提高开箱的安全性。
29.10、本专利采用所述远程控制模块包括远程控制电路,所述远程控制电路包括蓝牙传输模组u8001,所述蓝牙传输模组u8001的串行输出端连接于远程控制器u8002的一输入端,所述蓝牙传输模组u5001的输入端经传输天线y8001远程传输,并经退耦电容c8001和退耦电容c8002接地,由于远程控制电路通过蓝牙模块进行通信,保证了系统控制的稳定性和操作的便捷性。
30.11、本实用新型的目的是提供一种新型急诊气管插管车,它能够使物品放置整齐、型号齐全,利于物品的清点和补充,保证无菌物品的有效期,从而为紧急气管插管抢救赢得时间,保证患者的安全,同时,具有以下几方面的技术效果:
31.(1)由于气管插管需要的所有物品集中放置,抢救时,任何工作人员,包括护士、医师、护理辅助人员均可协助推车,从而使气管插管用物的准备时间几乎为零,为紧急气管插管抢救赢得时间。
32.(2)备物充分,利于管理。单就气管插管时所需的气管导管而言,其型号多且类型不一,有经口气管导管和经鼻气管导管。而急救气管插管车可将各类物品分类、分型放置,一目了然,方便物品器械的清点、补充、消毒及维护。
33.(3)设置科学。该车将最需要用的气管导管、咽喉镜放置在上层的气管导管格、咽喉镜格内,紧急气管插管时,取用方便快捷。
34.(4)操作空间大。该车配备伸缩板,气管插管时支起伸缩板,即成一个操作台向。
35.(5)方便移动。该车配备车轮、扶手,方便抢救时移动。
附图说明
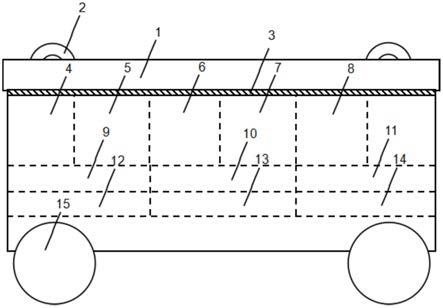
36.图1是本实用新型治疗车的结构示意图;
37.图2是本实用新型治疗车的电气模块图;
38.图3是本实用新型治疗车的车轮驱动电路电路图;
39.图4是本实用新型治疗车的方向识别电路电路图;
40.图5是本实用新型治疗车的本地传输电路电路图;
41.图6是本实用新型治疗车的电源供给电路电路图;
42.图7是本实用新型治疗车的过期报警电路电路图;
43.图8是本实用新型治疗车的开锁选择电路电路图;
44.图9是本实用新型治疗车的远程控制电路电路图。
具体实施方式
45.以下结合附图对本实用新型做进一步描述:
46.图中:
47.1-上盖、2-扶手、3-伸缩板、4-气管导管分类格、5-导丝格、6-药品格、7-注射器格、8-咽喉镜格、9-口咽通气道抽屉、10-人工呼吸器抽屉、11-经皮气管切开套管抽屉、12-物品盘点登记本抽屉、13-气管切开套管抽屉、14-相关辅助物品抽屉、15-车轮;
48.a200-治疗车控制单元、a100-前方向识别单元、a101-后方向识别单元、a102-左方向识别单元、a103-右方向识别单元、a400-前左车轮驱动单元、a401-前右车轮驱动单元、a402-后左车轮驱动单元、a403-后右车轮驱动单元、a500-本地传输单元、a600-过期报警单元;
49.u4001-车轮驱动器、d4001-快速二极管、m4000-直流电机、d4002-快速二极管、c4003-退耦电容、c4004-退耦电容、c4001-退耦电容、c4002-退耦电容;
50.q1001-三极管、r1001-电阻、ar1001-可调电阻、r1002-电阻、d1001-红外二极管;
51.u5001-蓝牙传输模组、c5001-退耦电容、c5002-退耦电容、y5001-传输天线;
52.u7001-稳压片、u7002-稳压片、c7003-退耦电容、c7004-退耦电容;
53.q6001-三极管、r6001-电阻、l6001-报警器;
54.s2001-按钮、s2002-按钮、s2003-按钮、s2004-按钮、r2001-上拉电阻、r2002上拉电阻、r2003-上拉电阻、r2004-上拉电阻;
55.u8001-蓝牙传输模组、y8001-传输天线、c8001-退耦电容、c8002-退耦电容;
56.实施例:
57.实施例:如图1所示,一种急诊气管插管治疗车,包括具有车轮15的治疗车本体,所述治疗车本体上表面通过伸缩板3设置上盖1,其两侧分别设置扶手2,所述治疗车本体的内上半部纵向分布气管导管分类格4、导丝格5、药品格6、注射器格7、咽喉镜格8,其内下半部横向按层分布口咽通气道抽屉9、人工呼吸器抽屉10、经皮气管切开套管抽屉11、物品盘点登记本抽屉12、气管切开套管抽屉13、相关辅助物品抽屉14。
58.如图2所示,所述治疗车还包括远程控制系统,所述远程控制系统包括智能控制模块,所述智能控制模块包括方向识别模块,所述方向识别模块感应输出于治疗车控制模块,所述治疗车控制模块控制输出于车轮15驱动模块,所述治疗车控制模块的一输入端连接于开锁选择模块和过期报警模块,其一输出端经本地传输模块与远程传输模块的数据交互连接于远程控制模块,所述远程控制系统通过电源供给模块供电。
59.所述远程控制系统包括治疗车控制单元a200,所述治疗车控制单元a200输入端依次连接于前方向识别单元a100、后方向识别单元a101、左方向识别单元a102、右方向识别单元a103,所述治疗车控制单元a200输出端依次连接于前左车轮15驱动单元a400、前右车轮15驱动单元a401、后左车轮15驱动单元a402、后右车轮15驱动单元a403以及本地传输单元a500和过期报警单元a600。
60.如图3所示,所述前左车轮15驱动单元a400、前右车轮15驱动单元a401、后左车轮
15驱动单元a402、后右车轮15驱动单元a403均包括车轮15驱动电路,所述车轮15驱动电路包括:
61.车轮15驱动器u4001,所述车轮15驱动器u4001输入端连接于治疗车控制单元a200的一输出端,所述车轮15驱动器u4001输出端连接于快速二极管d4001的正极和直流电机m4000输入端,所述直流电机m4000的输出端连接于快速二极管d4002的负极并接地,所述快速二极管d4001的负极接12v电源,所述快速二极管d4002的负极接地,所述12v电源经退耦电容c4003和退耦电容c4004接地,vcc电源通过退耦电容c4001和退耦电容c4002接地。
62.如图4所示,所述前方向识别单元a100、后方向识别单元a101、左方向识别单元a102、右方向识别单元a103均包括方向识别电路,所述方向识别电路包括:
63.三极管q1001,所述三极管q1001的基极经电阻r1001接vcc电源,所述三极管q1001的集电极经可调电阻ar1001接vcc电源,所述三极管q1001的发射极经接地,所述三极管q1001的集电极经电阻r1002输出于治疗车控制单元a200的一输入端。
64.如图5所示,所述本地传输单元a500包括蓝牙传输模组u5001,所述蓝牙传输模组u5001的串行输入端连接于治疗车控制单元a200的一输出端,并经退耦电容c5001和退耦电容c5002接地,所述蓝牙传输模组u5001的输出端经传输天线y5001远程传输。
65.如图6所示,所述电源供给模块包括稳压片u7001和稳压片u7002,所述稳压片u7001和稳压片u7002的相应的输入端共同连接于acc总电源,所述稳压片u7001的输出端通过退耦电容c7003连接于输出vcc电源,所述稳压片u7002的输出端通过退耦电容c7004连接于输出12v电源。
66.如图7所示,所述过期报警单元a600包括过期报警电路,所述过期报警电路包括:
67.三极管q6001,所述三极管q6001的基极经电阻r6001连接于治疗车控制单元a200的一输出端,所述三极管q6001的集电极通过报警器l6001连接于vcc电源,所述三极管q6001的发射极接地。
68.如图8所示,所述治疗车控制单元a200包括开锁选择子单元,所述开锁选择子单元包括开锁选择电路,所述开锁选择电路包括:
69.按钮s2001、按钮s2002、按钮s2003、按钮s2004,所述按钮s2001、按钮s2002、按钮s2003、按钮s2004的相应的接地端接地,其相应的输出端分别通过上拉电阻r2001、上拉电阻r2002、上拉电阻r2003、上拉电阻r2004分别输出至治疗车控制单元a200的相应的输入端。
70.如图9所示,所述远程控制模块包括远程控制电路,所述远程控制电路包括:
71.蓝牙传输模组u8001,所述蓝牙传输模组u8001的串行输出端连接于远程控制器u8002的一输入端,所述蓝牙传输模组u5001的输入端经传输天线y8001远程传输,并经退耦电容c8001和退耦电容c8002接地。
72.工作原理:
73.本专利通过具有车轮的治疗车本体,所述治疗车本体上表面通过伸缩板设置上盖,其两侧分别设置扶手,所述治疗车本体的内上半部纵向分布气管导管分类格、导丝格、药品格、注射器格、咽喉镜格,其内下半部横向按层分布口咽通气道抽屉、人工呼吸器抽屉、经皮气管切开套管抽屉、物品盘点登记本抽屉、气管切开套管抽屉、相关辅助物品抽屉,由于急诊气管插管车,由上盖、扶手、伸缩板、气管导管分类格、导丝格、药品格、注射器格、咽
喉镜格、口咽通气道抽屉、人工呼吸器抽屉、经皮气管切开套管抽屉、物品盘点登记本抽屉、气管切开套管抽屉、相关辅助物品抽屉以及车轮组成,它能够使物品放置整齐、型号齐全,利于物品的清点和补充,保证无菌物品的有效期,从而为紧急气管插管抢救赢得时间,保证患者的安全,同时,通过所述治疗车还包括远程控制系统,所述远程控制系统包括智能控制模块,所述智能控制模块包括方向识别模块,所述方向识别模块感应输出于治疗车控制模块,所述治疗车控制模块控制输出于车轮驱动模块,所述治疗车控制模块的一输入端连接于开锁选择模块和过期报警模块,其一输出端经本地传输模块与远程传输模块的数据交互连接于远程控制模块,所述远程控制系统通过电源供给模块供电,由于治疗车的姿态完全交由单片机控制,当然其控制策略会根据传感器的输入信号而有所不同;传统治疗车一般由人推行,由于车体较重,对于力气较小的医务人员,容易推偏或撞车,本系统在原有基础上治疗车基础上增加助力功能,方便了医务人员的推行操作,由于避障与寻迹的原理相同,只是姿态调整策略和传感器的形式不同,为了操作简单,并考虑到避障功能展示时较为方便,所以只计划实现该功能。避障传感器采用红外光电反射传感器模块,该模块由一对红外发射和接收管组成,可以通过电位器调整测量距离。这里采用的姿态调整策略为当遇到障碍时,根据传感器传送的障碍的来源方向及时调整车轮的方向和运行角度,从而避免了撞车和推偏的情况发生,同时减轻了医务人员的工作负担,本实用新型解决了现有技术存在治疗车由于物品不便于收纳且智能化程度低,从而不利于急救和抢救的问题,具有保证患者的安全、避免了撞车和推偏的情况发生,同时减轻了医务人员的工作负担的有益技术效果。
74.利用本实用新型的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1