单根手指及智能手部康复训练装置的制作方法
1.本实用新型属于医疗康复设备技术领域,具体涉及一种单根手指及智能手部康复训练装置。
背景技术:
2.手部功能障碍是现代人类常见的康复类疾病问题之一,严重影响人们的日常生活和心理健康,脑卒中、运动损伤、脊髓损伤等情况都会引起手部功能障碍,其中脑卒中患者众多,是神经系统的常见病和多发病,手部功能障碍的患者大多由脑卒中引起;脑卒中的康复治疗包括传统康复治疗方法(物理治疗、作业治疗和语言治疗等)、物理因子疗法、外部器械辅助下的患肢主动训练、药物以及微创治疗四种治疗手段。有研究表明,手部的活动可以受双侧大脑的支配、调节,在康复训练过程中多进行双侧训练,尤其是手部康复训练可以取得更好的康复疗效,所以手部功能的康复是这些脑卒中患者尤其是手部功能障碍患者在康复训练时的重要组成部分。传统的手部康复训练需要人工,但是康复医师等医疗资源有限,无法满足当前大量的手部康复需求。目前手部康复训练装置主要有大型的机械传动型或者小型的机械索控型。其中大型的机械传动型主要采用气动或者电动的方式驱动机械结构传动,训练整个上肢;小型的机械索控类康复手套是利用手套穿戴者自身的力源,通过残留肢体的机械动作拉动链条或是绳索来控制手套的肘关节及手部动作,来达到康复训练的目的。
3.目前市面上的手部康复器械大都体量较大(即使使用部分不大,也依托于桌面、气动电动控制的较大型辅助器械),受空间限制大,且价格十分昂贵,训练模式单一,只有康复医院或者康复机构可以承担,普通手部功能障碍患者需要长期且定期去康复医院或者康复机构训练,严重者只能卧床由人工辅助进行手部康复训练。
4.传统的装饰性手套仅仅是装饰作用,没有任何实际功能。机械索控类康复手套是通过绳索进行牵引,来控制手套的肘关节及手部动作,但因为控制方法的落后和不实用,机械索控类产品表现出功能单一、速度缓慢、动作不灵巧、不便于维护等问题;同时现有的商业化的肌电手套也存在着手套控制信号源单一等缺点,传统的手部康复训练方式从供给量到康复效果,都无法满足患者需求,从而给患者、家庭以及社会增加沉重的负担。
5.基于手掌骨生物动力学分析得知,人类手部具有21个自由度,其中大拇指的指间关节(ip)和掌指关节(mcp)各1个自由度,腕掌关节(cm)有3个自由度,共5个自由度;四指每个手指的近端指间关节(pip)和远端指间关节(dip)各有 1个自由度,掌指关节有2个转动自由度,共4个自由度。大拇指和其他四指均各具备2个自由度,分别是掌指关节的弯曲/伸展和指间关节的弯曲/伸展;四指远指端关节的自由度由近指端关节和其的关节耦合性来实现。
技术实现要素:
6.有鉴于此,本实用新型的主要目的在于提供一种单根手指及智能手部康复训练装
置。
7.为达到上述目的,本实用新型的技术方案是这样实现的:
8.本实用新型实施例提供一种单根手指,包括指骨关节模拟组件、指骨自由度调节组件、舵机驱动机构;
9.所述指骨关节模拟组件用于模拟手指的三个关节部分并且套设在用户的手指上;
10.所述指骨自由度调节组件铰接在指骨关节模拟组件的上侧,用于调节指骨关节模拟组件的关节交接处的自由度;
11.所述舵机驱动机构设置在指骨自由度调节组件的右端,用于向指骨自由度调节组件提供推力。
12.上述方案中,所述指骨关节模拟组件包括掌骨板、近指骨外壳、中指骨外壳,所述掌骨板、近指骨外壳、中指骨外壳从右到左依次交接。
13.上述方案中,所述掌骨板的左端和近指骨外壳的右端之间通过掌骨连接件铰接。
14.上述方案中,所述近指骨外壳的左端和中指骨外壳的右端通过掌骨连接件铰接。
15.上述方案中,所述指骨自由度调节组件包括近指关节推杆、近指关节角板、中指关节角板、中指关节推杆,所述近指关节角板的左右两端分别与中指关节角板的右端、指关节推杆的左端铰接,下端与指骨关节模拟组件的掌骨板靠近左端的一侧通过固定件铰接,所述指关节推杆的右端与舵机驱动机构铰接,所述中指关节角板左侧的上端铰接在指骨关节模拟组件的近指骨外壳上的第一固定架上端,左侧的下端与中指关节推杆的右端铰接,所述中指关节推杆的左端与指骨关节模拟组件的中指骨外壳的第二固定架的端部铰接。
16.本实用新型实施例还提供一种智能手部康复训练装置,该装置包括手部支撑组件、控制电路、五根如上述方案中任意一项所述的单根手指;
17.所述手部支撑组件套设在患者手臂上并且用于支撑控制电路、五根单根手指;
18.所述控制电路设置在手部支撑组件的上侧,用于向每根单根手指发送控制信号;
19.所述五根单根手指根据手部手指的位置分别设置在手部支撑组件一侧的对应位置,用于根据控制信号带动带动手指进行活动。
20.上述方案中,所述手部支撑组件包括掌骨支撑板、拇指骨架板、掌骨侧板掌骨连接件,所述掌骨支撑板的两侧分别设置拇指骨架板、掌骨侧板掌骨连接件,并且形成能够容纳手臂的腔体。
21.上述方案中,四根所述单根手指的掌骨板的右端固定在掌骨支撑板的一侧,第五所述单根手指的掌骨板的右端固定在拇指骨架板的一侧,所有所述舵机驱动机构固定设置在设置在掌骨支撑板。
22.上述方案中,所述控制电路设置在掌骨支撑板上并且与每根单根手指的舵机驱动机构连接。
23.与现有技术相比,本实用新型能够实现手部康复的运动训练,运动训练动作自由度高,提高训练效率和效果。
附图说明
24.此处所说明的附图用来公开对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的
不当限定。在附图中:
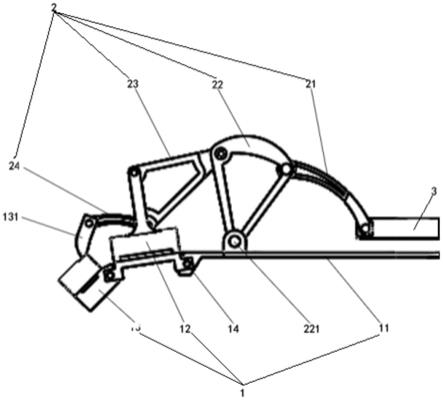
25.图1为本实用新型实施例提供一种单根手指的结构示意图;
26.图2为本实用新型实施例提供一种智能手部康复训练装置的结构示意图;
27.图3为图2的正视图。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
30.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
31.本实用新型实施例提供一种单根手指,如图1所示,包括指骨关节模拟组件1、指骨自由度调节组件2、舵机驱动机构3;
32.所述指骨关节模拟组件1用于模拟手指的三个关节部分并且套设在用户的手指上;
33.所述指骨自由度调节组件2铰接在指骨关节模拟组件1的上侧,用于调节指骨关节模拟组件1的关节交接处的自由度;
34.所述舵机驱动机构3设置在指骨自由度调节组件2的右端,用于向指骨自由度调节组件2提供推力。
35.所述指骨关节模拟组件1包括掌骨板11、近指骨外壳12、中指骨外壳13,所述掌骨板11、近指骨外壳12、中指骨外壳13从右到左依次交接。
36.所述掌骨板11的左端和近指骨外壳12的右端之间通过掌骨连接件14铰接。
37.所述近指骨外壳12的左端和中指骨外壳13的右端通过掌骨连接件14铰接。
38.所述指骨自由度调节组件2包括近指关节推杆21、近指关节角板22、中指关节角板23、中指关节推杆24,所述近指关节角板22的左右两端分别与中指关节角板23的右端、指关节推杆21的左端铰接,下端与指骨关节模拟组件1 的掌骨板11靠近左端的一侧通过固定件221铰接,所述指关节推杆21的右端与舵机驱动机构3铰接,所述中指关节角板23左侧的上端铰接在指骨关节模拟组件1的近指骨外壳12上的第一固定架121上端,左侧的下端与中指关节推杆 24的右端铰接,所述中指关节推杆24的左端与指骨关节模拟组件1的中指骨外壳13的第二固定架131的端部铰接。
39.所述近指关节推杆21、近指关节角板22、中指关节角板23、中指关节推杆24之间相互顺次铰接接均采用带肩扣环固定型的铰链销。
40.所述舵机驱动机构3采用直线推杆方式,可以简化机构设计。
41.本实用新型实施例还提供一种智能手部康复训练装置,如图2、3所示,该装置包括手部支撑组件4、控制电路5、五根单根手指;
42.所述手部支撑组件4套设在患者手臂上并且用于支撑控制电路5、五根单根手指;
43.所述控制电路5设置在手部支撑组件4的上侧,用于向每根单根手指发送控制信号;
44.所述五根单根手指根据手部手指的位置分别设置在手部支撑组件4一侧的对应位置,用于根据控制信号带动带动手指进行活动。
45.如图1所示,所述单根手指包括指骨关节模拟组件1、指骨自由度调节组件2、舵机驱动机构3;
46.所述指骨关节模拟组件1用于模拟手指的三个关节部分并且套设在用户的手指上;
47.所述指骨自由度调节组件2铰接在指骨关节模拟组件1的上侧,用于调节指骨关节模拟组件1的关节交接处的自由度;
48.所述舵机驱动机构3设置在指骨自由度调节组件2的右端,用于向指骨自由度调节组件2提供推力。
49.所述指骨关节模拟组件1包括掌骨板11、近指骨外壳12、中指骨外壳13,所述掌骨板11、近指骨外壳12、中指骨外壳13从右到左依次交接。
50.所述掌骨板11的左端和近指骨外壳12的右端之间通过掌骨连接件14铰接。
51.所述近指骨外壳12的左端和中指骨外壳13的右端通过掌骨连接件14铰接。
52.所述指骨自由度调节组件2包括近指关节推杆21、近指关节角板22、中指关节角板23、中指关节推杆24,所述近指关节角板22的左右两端分别与中指关节角板23的右端、指关节推杆21的左端铰接,下端与指骨关节模拟组件1 的掌骨板11靠近左端的一侧通过固定件221铰接,所述指关节推杆21的右端与舵机驱动机构3铰接,所述中指关节角板23左侧的上端铰接在指骨关节模拟组件1的近指骨外壳12上的第一固定架121上端,左侧的下端与中指关节推杆 24的右端铰接,所述中指关节推杆24的左端与指骨关节模拟组件1的中指骨外壳13的第二固定架131的端部铰接。
53.所述近指关节推杆21、近指关节角板22、中指关节角板23、中指关节推杆24相互顺次铰接接均采用带肩扣环固定型的铰链销。
54.所述舵机驱动机构3采用直线推杆方式,可以简化机构设计。
55.所述手部支撑组件4包括掌骨支撑板41、拇指骨架板42、掌骨侧板掌骨连接件14,所述掌骨支撑板41的两侧分别设置拇指骨架板42、掌骨侧板掌骨连接件14,并且形成能够容纳手臂的腔体,
56.四根所述单根手指的掌骨板11的右端固定在掌骨支撑板41的一侧,第五所述单根手指的掌骨板11的右端固定在拇指骨架板42的一侧,所有所述舵机驱动机构3固定设置在设置在掌骨支撑板41。
57.所述控制电路5设置在掌骨支撑板41上并且与每根单根手指的舵机驱动机构3连
接。
58.所述控制电路5通过myo成熟的肌肉电信号传感器,对多个通道的多种训练手势的肌电信号进行采集,肌电信号传感器(emg,electromyography)采集电路能够捕捉皮肤表面的微弱肌电信号,并进行放大和滤波,输出信号可被 arduino等处理器识别,用作基于肌电信号的控制系统,然后通过蓝牙模块,将emg信号发送到raspberry pi 3b+上,然后将采集到的信号进行采样、滤波与dsp处理,并通过模式匹配算法,分析手势,最后,将手势信号发送给arduino 控制器,通过输出pwm波,控制舵机驱动机构3转的角度,从而控制机械手执行相应手势,从而完成患者的主动训练过程。
59.除了通过采集生物肌电信号来控制智能外骨骼以进行主观意识的手部康复主动训练,所述控制电路5也可以通过与app移动客户端连接,通过app移动客户端对外骨骼的动作进行被动训练,通过在app上选择想要训练的动作和模式,通过蓝牙模块可以和本实用新型建立信号连接,将控制信号传递到机械手的控制板,控制外骨骼可以自动操作带动手指进行活动,从而达到手部康复被动训练的目的。
60.本实用新型根据手部多自由度进行结构设计,通过借鉴成熟的外骨骼模型,设计出将手指的运动分解为5个自由度的基础构型,通过三维建模软件进行建模,同时,通过采用通过remake软件的三维重建技术,设计出1:1的患者的手套的外壳,同时前期基于inmoov开源人形机器模型,设计手套的抓取动力结构,后期采取外骨骼的设计,对患者的机械手进行重新定制化设计,并且通过 3d打印技术将患者的手套制作出来。
61.在某个手指在主动训练或者被动训练模式下,所述舵机驱动机构3向左推动关节推杆21,所述关节推杆21给予近指关节角板22一个向左的力,由于近指关节角板22的下端铰接,所以近指关节角板22受到向左的力之后,以下端为圆心向左摆动,同时给予中指关节角板23向左的力,所述中指关节角板23 左侧上端固定在近指骨外壳12,在此限位作用下,所述中指关节角板23受到的一部分向左的力转向垂直于近指骨外壳12施加,那么近指骨外壳12就沿与掌骨板11铰接处向下转动,实现弯曲,所述中指关节角板23受到的另外一部分向左的力转向施加到中指关节推杆24,所述中指关节推杆24向左推动第二固定架131,这样,所述中指骨外壳13沿与近指骨外壳12的铰接处向下转动实现弯曲。
62.以上所述,仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1