一种临床手术腕关节固定架
1.本实用新型涉及医疗器械技术领域,特别是涉及一种临床手术腕关节固定架。
背景技术:
2.手术指医生用医疗器械对病人身体进行的切除、缝合等治疗。以刀、剪、针等器械在人体局部进行的操作,来维持患者的健康。是外科的主要治疗方法,俗称“开刀”。目的是医治或诊断疾病,如去除病变组织、修复损伤、移植器官、改善机体的功能和形态等。当前,医生在对患者的腕关节进行手术时需要通过固定架对腕关节进行固定保护,然而,现有技术中的固定架结构固定不能调节,使得医生在手术时难以根据实际手术的需求对固定架进行倾斜角度调整,致使医生在手术时容易存在盲区,影响手术效果,给医生开展手术作业带来麻烦,为了解决上述问题我们提出了一种临床手术腕关节固定架。
技术实现要素:
3.本实用新型提供了一种临床手术腕关节固定架,解决了现有技术中的技术问题。
4.本实用新型解决上述技术问题的方案如下:一种临床手术腕关节固定架,包括托座,所述托座的顶部设有放置弧槽,所述托座的一侧设有固定部件,所述固定部件包括滑轨,所述滑轨上活动连接有多个滑块,每个所述滑块的顶部均连接有松紧绑带,所述松紧绑带上设有与魔术母贴相配合作业的魔术子贴,所述滑块上贯穿开设有螺孔,所述螺孔内活动连接有压紧螺杆,所述压紧螺杆上连接有拧动把手,所述托座的另一侧设有魔术母贴,所述托座的底部设有底部可调机构。
5.在上述技术方案的基础上,本实用新型还可以做如下改进。
6.进一步,所述底部可调机构包括底部板体,所述底部板体上设有控制面板,所述底部板体的内腔设有转杆,所述转杆的外周套接有从动辊,所述底部板体的内腔与转杆的两端位置对应处均贯穿设有圆形连接孔,每个所述圆形连接孔的内腔均连接有与转杆相适配的轴承座,所述转杆的两端分别插接固定至各自所对应的轴承座内腔,所述底部板体的侧壁上连接有伺服减速电机,且所述伺服减速电机的输出轴与转杆的端部相连接,所述从动辊上切削有连接平面,所述从动辊的连接平面上设有二级调节模块。
7.进一步,所述从动辊的两端均连接有光滑导杆,所述底部板体的内腔与两个光滑导杆位置对应处均贯穿设有环形导向滑槽,且所述光滑导杆远离从动辊的一端穿过所对应的环形导向滑槽内腔。
8.进一步,所述二级调节模块包括基板,所述基板一侧的上方设有电动缸,所述电动缸的顶端以及底端均转动连接有端部架,所述基板顶部的另一侧对称连接有两个固定块,每个所述固定块的顶端均转动连接有安装架。
9.进一步,所述电动缸底端所连接的端部架固定连接于基板的顶部,所述电动缸顶端所连接的端部架与托座的底部相连接。
10.进一步,两个所述安装架的顶端均固定连接于托座的底部。
11.进一步,所述滑轨固定连接于托座远离魔术母贴的一侧。
12.进一步,所述电动缸以及伺服减速电机均与控制面板电性连接。
13.进一步,所述基板通过螺栓与从动辊上的连接平面相连接。
14.本实用新型的有益效果是:本实用新型提供了一种临床手术腕关节固定架,具有以下优点:
15.1、本临床手术腕关节固定架能够对患者手腕关节部位进行固定,且在手术过程中能够医生能够根据自身手术的需求对固定架的倾斜角进行调整,方便医生手术时从不同角度观察患者手腕关节部位,从而有效避免盲区对手术的影响,方便医生进行临床手术的同时,也有利于提升手术效果;
16.2、通过多个松紧绑带在对患者手腕关节部位进行固定时,能够由滑块带动松紧绑带运动,使得松紧绑带对患者腕关节的固定部位能够根据患者腕关节的长宽尺寸灵活的进行调整,当松紧绑带调整至合适位置后,医生再拧动拧动把手,使得拧动把手带动压紧螺杆旋转,使得压紧螺杆能够紧压在滑轨上,从而方便对调整位置后的松紧绑带进行位置固定;
17.3、医生在对患者腕关节处进行手术时,通过伺服减速电机带动从动辊转动,使得从动辊能够带动托座进行左右方向上的摆动,通过二级调节模块能够带动托座在前后方向上进行摆动,使得本固定架在临床手术时能够在多个维度上实现倾斜角度调节,调节范围广,可有效消除手术过程中的盲区,保障手术效果。
18.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
附图说明
19.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
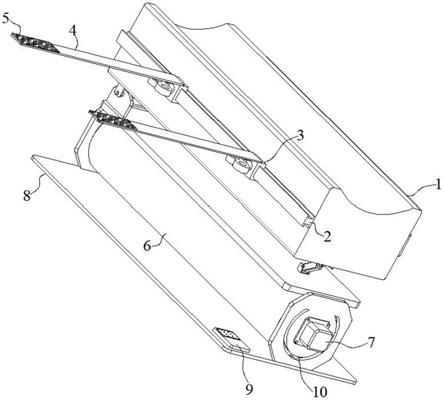
20.图1为本实用新型一实施例提供的一种临床手术腕关节固定架的结构示意图;
21.图2为图1提供的一种临床手术腕关节固定架中的仰视结构示意图;
22.图3为图1提供的一种临床手术腕关节固定架的侧视结构示意图;
23.图4为图1提供的一种临床手术腕关节固定架中二级调节模块的结构示意图。
24.附图中,各标号所代表的部件列表如下:
25.1、托座;2、滑轨;3、滑块;4、松紧绑带;5、魔术子贴;6、从动辊;7、伺服减速电机;8、底部板体;9、控制面板;10、光滑导杆;11、压紧螺杆;12、拧动把手;13、轴承座;14、魔术母贴;15、电动缸;16、端部架;17、安装架;18、固定块;19、基板。
具体实施方式
26.以下结合附图1-4对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。在下列段落中参照附图以举例方式更具体地描述本实用新型。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本
实用新型实施例的目的。
27.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
29.如图1-4所示,本实用新型提供了一种临床手术腕关节固定架,包括托座1,托座1的顶部设有放置弧槽,托座1的一侧设有固定部件,固定部件包括滑轨2,滑轨2上活动连接有多个滑块3,每个滑块3的顶部均连接有松紧绑带4,松紧绑带4上设有与魔术母贴14相配合作业的魔术子贴5,滑块3上贯穿开设有螺孔,螺孔内活动连接有压紧螺杆11,压紧螺杆11上连接有拧动把手12,托座1的另一侧设有魔术母贴14,托座1的底部设有底部可调机构。在进行腕关节手术前,患者先将其腕关节放置在托座1上的放置弧槽内,通过松紧绑带4上的魔术子贴5与魔术母贴14之间的配合作业,使得松紧绑带4能够对患者的腕关节部位进行束缚固定。在松紧绑带4对患者腕关节部位进行固定前,医生可通过滑块3带动松紧绑带4运动,使得松紧绑带4的固定位置能够根据患者腕关节的长宽尺寸灵活的进行调节,在松紧绑带4调整至合适位置后,医生再通过拧动拧动把手12带动压紧螺杆11旋转,使得压紧螺杆11能够紧压在滑轨2上,实现对松紧绑带4的位置固定。
30.优选的,底部可调机构包括底部板体8,底部板体8上设有控制面板9,底部板体8的内腔设有转杆,转杆的外周套接有从动辊6,底部板体8的内腔与转杆的两端位置对应处均贯穿设有圆形连接孔,每个圆形连接孔的内腔均连接有与转杆相适配的轴承座13,转杆的两端分别插接固定至各自所对应的轴承座13内腔,底部板体8的侧壁上连接有伺服减速电机7,且伺服减速电机7的输出轴与转杆的端部相连接,从动辊6上切削有连接平面,从动辊6的连接平面上设有二级调节模块。在手术过程中能够通过控制面板9控制伺服减速电机7的开启与关闭,再由伺服减速电机7带动从动辊6转动,使得从动辊6能够带动托座1进行左右方向上的摆动,还可通过二级调节模块能够带动托座1在前后方向上进行摆动,使得本固定架在临床手术时能够在多个维度上实现倾斜角度调节,调节范围广,可有效消除手术过程中的盲区,保障手术效果。
31.优选的,从动辊6的两端均连接有光滑导杆10,底部板体8的内腔与两个光滑导杆10位置对应处均贯穿设有环形导向滑槽,且光滑导杆10远离从动辊6的一端穿过所对应的环形导向滑槽内腔。通过环形导向滑槽对光滑导杆10的运动进行导向限位处理,使得从动辊6在转动的过程中不会发生晃动,从而保障从动辊6转动的稳定性。
32.优选的,二级调节模块包括基板19,基板19一侧的上方设有电动缸15,电动缸15的顶端以及底端均转动连接有端部架16,基板19顶部的另一侧对称连接有两个固定块18,每个固定块18的顶端均转动连接有安装架17。通过控制面板9控制电动缸15的伸缩带动托座1在前后方向上进行摆动。
33.优选的,电动缸15底端所连接的端部架16固定连接于基板19的顶部,电动缸15顶端所连接的端部架16与托座1的底部相连接。
34.优选的,两个安装架17的顶端均固定连接于托座1的底部。
35.优选的,滑轨2固定连接于托座1远离魔术母贴14的一侧。
36.优选的,电动缸15以及伺服减速电机7均与控制面板9电性连接。在手术过程中能够通过控制面板9控制伺服减速电机7的开启与关闭,还可通过控制面板9控制电动缸15的伸缩带动托座1在前后方向上进行摆动。
37.优选的,基板19通过螺栓与从动辊6上的连接平面相连接。
38.本实用新型的具体工作原理及使用方法为:
39.在进行腕关节手术前,患者先将其腕关节放置在托座1上的放置弧槽内,通过松紧绑带4上的魔术子贴5与魔术母贴14之间的配合作业,使得松紧绑带4能够对患者的腕关节部位进行束缚固定,在松紧绑带4对患者腕关节部位进行固定前,医生可通过滑块3带动松紧绑带4运动,使得松紧绑带4的固定位置能够根据患者腕关节的长宽尺寸灵活的进行调节,在松紧绑带4调整至合适位置后,医生再通过拧动拧动把手12带动压紧螺杆11旋转,使得压紧螺杆11能够紧压在滑轨2上,实现对松紧绑带4的位置固定。在手术过程中能够通过控制面板9控制伺服减速电机7的开启与关闭,再由伺服减速电机7带动从动辊6转动,使得从动辊6能够带动托座1进行左右方向上的摆动,并且,还可通过控制面板9控制电动缸15的伸缩带动托座1在前后方向上进行摆动,使得本固定架在临床手术时能够在多个维度上实现倾斜角度调节,调节范围广,可有效消除手术过程中的盲区。
40.需要说明的是,在本文中出现的电器元件均与外界的220v市电电连接。
41.以上所述,仅为本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上所述而顺畅地实施本实用新型;但是,凡熟悉本专业的技术人员在不脱离本实用新型技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本实用新型的等效实施例;同时,凡依据本实用新型的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本实用新型的技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1