一种电动升降导航仪及骨科手术机器人的制作方法
1.本实用新型涉及骨科手术机器人技术检测领域,特别涉及一种骨科手术机器人用电动升降导航仪及骨科手术机器人。
背景技术:
2.随着计算机自动化、手术病灶三维可视化、术中实时光学导航等技术的迅速发展,手术机器人在精准度、安全性、操作性等方面都有了较大的提高。在骨科应用方面,采用骨科手术机器人去解决临床手术中的难点已经成为可能,机器人进行骨科手术具有创伤小、手术并发症少、患者恢复快、医患辐射伤害少等优势。
3.骨科手术机器人是一组手术器械的组合装置,它主要包括导航仪和机械臂两部分,医生坐在电脑显示屏前,透过显示屏观察病人体内的病灶情况,通过远程操控机器臂执行末端的手术器械对病灶进行精准切除或修复。导航仪由仪器机身和探测头组成,其作用是术中动态采集和监督患者病灶和手术器械的相对位置变化信息,提供实时反馈以利于术者及时调节手术操作。现有技术中骨科手术机器人用导航仪的机身大多数是固定装配的,其自身高度并不能人为地控制调节。
4.因此,针对现有技术不足,提供一种骨科手术机器人用电动升降导航仪及骨科手术机器人以解决现有技术不足甚为必要。
技术实现要素:
5.本实用新型的其中一个目的在于避免现有技术的不足之处而提供一种骨科手术机器人用电动升降导航仪。该骨科手术机器人用导航仪具备电动调节高度的优点。
6.本实用新型的上述目的通过以下技术措施实现:
7.提供一种骨科手术机器人用电动升降导航仪,设置有主体、固定座和用于带动主体整体上下移动的电升降机构,电升降机构的一端固定装配于固定座,电升降机构的另一端与主体固定装配。
8.优选的,上述电升降机构设置有丝杆、升降导向部、导向组件、驱动电机,驱动电机和导向组件固定装配于固定座,驱动电机的传动轴与丝杆固定连接,升降导向部与丝杆螺纹连接,升降导向部与主体固定装配,且升降导向部还与导向组件活动套装。
9.优选的,上述升降导向部设置有导向件和套环,导向件固定装套于套环外表面,导向件与导向组件活动套装,套环与丝杆螺纹连接。
10.优选的,上述导向件设置有底板和围边,围边环绕于底板边缘,且围边与底板一体连接。
11.优选的,上述底板与围边形成用于与主体末端装配的装配腔及第一容纳腔,装配腔与第一容纳腔连通。
12.优选的,上述围边设置有多个用于与导向组件活动套装的缺口。
13.优选的,上述底板的中心设置有通孔,套环固定装配于通孔。
14.优选的,上述导向组件设置有上固定环、下固定环、多条导向杆和导向座,上固定环与导向杆的一末端固定,下固定环与导向杆的另一末端固定,下固定环固定装配于导向座,导向座固定装配于固定座,且导向杆与缺口活动装配,驱动电机装配于导向座的内部。
15.优选的,上述升降导向部沿导向杆做上下往复运动。
16.优选的,上述导向座设置有第二容纳腔和用于驱动电机的传动轴贯穿的通孔。
17.优选的,上述电升降机构还设置有上端到位检测器和下端到位检测器,上端到位检测器装配于第一容纳腔,下端到位检测器装配于第二容纳腔。
18.本实用新型的另一个目的在于避免现有技术的不足之处而提供一种骨科手术机器人。该骨科手术机器人具有电动调节导航仪高度的优点。
19.本实用新型的上述目的通过以下技术措施实现:
20.提供一种骨科手术机器人,具有上述具有电动升降功能的骨科手术机器人用导航仪。
21.本实用新型的一种骨科手术机器人用电动升降导航仪及骨科手术机器人,设置有主体、固定座和用于带动主体整体上下移动的电升降机构,电升降机构的一端固定装配于固定座,电升降机构的另一端与主体固定装配。本实用新型的骨科手术机器人用导航仪具有电动高度调节的优点。
附图说明
22.利用附图对本实用新型作进一步的说明,但附图中的内容不构成对本实用新型的任何限制。
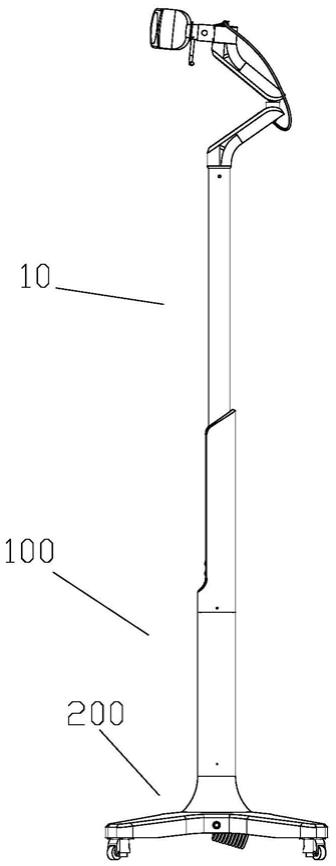
23.图1为实施例1的一种骨科手术机器人用电动升降导航仪的结构示意图。
24.图2为图1的部分结构示意图。
25.图3为电升降机构的结构示意图。
26.图4为升降导向部的结构示意图。
27.图5为导向件的结构示意图。
28.图6为导向件与主体装配时的结构示意图。
29.图7为导向组件的结构示意图。
30.在图1到图7中,包括有:
31.主体10、
32.电升降机构100、
33.丝杆110、
34.升降导向部120、导向件121、底板1211、围边1212、装配腔1213、第一容纳腔1214、缺口1215、套环122、
35.导向组件130、上固定环131、下固定环132、导向杆133、导向座134、第二容纳腔1341、
36.驱动电机140、
37.固定座200。
具体实施方式
38.结合以下实施例对本实用新型的技术方案作进一步说明。
39.实施例1。
40.一种骨科手术机器人用电动升降导航仪,如图1至7所示,设置有主体10、固定座200和用于带动主体10整体上下移动的电升降机构100,电升降机构100的一端固定装配于固定座200,电升降机构100的另一端与主体10固定装配。
41.电升降机构100设置有丝杆110、升降导向部120、导向组件130、驱动电机140,驱动电机140和导向组件130固定装配于固定座200,驱动电机140的传动轴与丝杆110固定连接,升降导向部120与丝杆110螺纹连接,升降导向部120与主体10固定装配,且升降导向部120还与导向组件130活动套装。
42.需要说明的是,本实用新型的导向组件130作用是保证电升降机构100在升降过程中不会晃动。
43.升降导向部120设置有导向件121和套环122,导向件121固定装套于套环122外表面,导向件121与导向组件130活动套装,套环122与丝杆110螺纹连接。导向件121设置有底板1211和围边1212,围边1212环绕于底板1211边缘,且围边1212与底板1211一体连接。底板1211与围边1212形成用于与主体10末端装配的装配腔1213及第一容纳腔1214,装配腔1213与第一容纳腔1214连通。围边1212设置有多个用于与导向组件130活动套装的缺口1215。底板1211的中心设置有通孔,套环122固定装配于通孔。
44.导向组件130设置有上固定环131、下固定环132、多条导向杆133和导向座134,上固定环131与导向杆133的一末端固定,下固定环132与导向杆133的另一末端固定,下固定环132固定装配于导向座134,导向座134固定装配于固定座200,且导向杆133与缺口1215活动装配,驱动电机140装配于导向座134的内部。升降导向部120沿导向杆133做上下往复运动。
45.导向座134设置有第二容纳腔1341和用于驱动电机140的传动轴贯穿的通孔。
46.电升降机构100还设置有上端到位检测器和下端到位检测器,上端到位检测器装配于第一容纳腔1214,下端到位检测器装配于第二容纳腔1341。
47.需要说明的是,本实用新型的上端到位检测器和下端到位检测器分别用于检测升降导向部120的上升及下降的极限位置,当升降导向部120到达极限位置时,触动上端到位检测器或者下端到位检测器,驱动电机140停止或者反向转动,达到保护电升降机构100的保护作用。
48.该具有电升降功能的骨科手术机器人用导航仪,通过电升降机构100的驱动电机140带动主体10整体上升或者下降,从而实现电动高度调节的功能。本实用新型的骨科手术机器人用导航仪具有电动高度调节的优点。
49.实施例2。
50.一种骨科手术机器人,具有如实施例1所述的具有电升降功能的骨科手术机器人用导航仪。
51.该骨科手术机器人的导航仪具有电动高度调节的优点。
52.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细说明,本领域的普通技
术人员应当理解,可以对本实用新型技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1