一种下肢力线角度的测量系统
1.本实用新型涉及骨科临床中下肢力线的检测领域,公开了一种下肢力线角度的测量系统。
背景技术:
2.膝骨关节炎是一种以膝关节软骨变性和丢失及关节边缘和软骨下骨骨质再生为特征的慢行关节疾病,临床表现以膝关节疼痛、畸形、功能障碍为主,严重者则需要通过人工膝关节置换、胫骨高位截骨术等临床手术进行治疗。
3.无论是膝关节置换还是胫骨高位截骨手术的规划、实施以及后期手术效果评估,下肢力线的精准判断是必不可少的过程。下肢力线是指股骨头中心点至踝关节中心点的连线,正常的下肢力线应经过膝关节的中心点。手术过程中,常需要不断定位人体的下肢力线,从而调整人体膝盖关节内翻角度。现有技术中,通常由手术医生手持金属力线测量杆的两端,使力线测量件的一端对准股骨头中心点,另一端对准踝关节中心点,再经过x光射线透视观察人体下肢力线是否经过膝关节的中心点,从而判断关节置换的角度或截骨角度是否恰当。
4.然而,这种医生手持力线测量件的测量定位方式,受医生手部抖动等人为因素的影响,可能降低测量的准确性。使用固定装置将力线测量杆固定在人体或手术台上,可提高测量准确性,但术中实时透视大大增加医生和患者受到的辐射剂量,影响其身体健康。
5.为了解决上述问题,专利201910599596公开了一种基于加速度和陀螺仪的下肢力线角度评估和截骨装置,通过固定在骨骼上的导航装置监测下肢运动,将导航装置所指示的方向转换为下肢力线的角度,进一步通过激光指示确定目标截骨的角度。该类实用新型在一定程度上解决了通过手持金属测量杆或固定杆的问题带来的辐射剂量问题,但需要通过钢钉将传感器固定于骨骼,仅可应用于术中,具有侵入性,此外,该方法需要多次测量才能够完成下肢力线的角度,步骤繁琐,增加了手术时长。最关键的是,此类方法无法精确确定膝关节和踝关节的中心点位置。专利201910884469则公布了一种利用ct影像数据建立下肢骨骼模型的方法,通过图像重建三维模型确定下肢力线,该方法可能较为精确,但操作过程较为繁琐,需要占用ct等资源,且不适用于术中进行力线的实时确定。
技术实现要素:
6.本实用新型的目的在于提供一种下肢力线角度的测量系统,解决了现有装置操作步骤繁琐、需要侵入性的将传感器固定于骨骼,不适于术中进行力线的实时确定的问题。
7.本实用新型是通过以下技术方案来实现:
8.一种下肢力线角度的测量系统,包括膝关节固定架、踝关节固定架、数据处理中心和显示模块;
9.膝关节固定架包括膝关节弹性固定本体,在膝关节弹性固定本体的一侧设有膝关节内侧传感单元,另一侧设有膝关节外侧传感单元;
10.踝关节固定架包括踝关节弹性固定本体,在踝关节弹性固定本体的一侧设有踝关节内侧传感单元,另一侧设有踝关节外侧传感单元;
11.膝关节内侧传感单元、膝关节外侧传感单元、踝关节内侧传感单元和踝关节外侧传感单元分别与数据处理中心连接,数据处理中心用于确定下肢力线及下肢力线的夹角;
12.显示模块与数据处理中心连接,用于显示下肢力线。
13.进一步,膝关节固定架还包括膝关节内护体和膝关节外护体,膝关节内护体连接在膝关节弹性固定本体的一侧,膝关节外护体连接在膝关节弹性固定本体的另一侧;
14.膝关节内侧传感单元固定在膝关节内护体上,膝关节外侧传感单元固定在膝关节外护体上。
15.进一步,踝关节固定架还包括踝关节内护体和踝关节外护体,踝关节内护体连接在踝关节弹性固定本体的一侧,踝关节外护体连接在踝关节弹性固定本体的另一侧;
16.踝关节内侧传感单元固定在踝关节内护体上,踝关节外侧传感单元固定在踝关节外护体上。
17.进一步,膝关节内侧传感单元、膝关节外侧传感单元、踝关节内侧传感单元和踝关节外侧传感单元均内置有无线通讯模块,无线通讯模块与数据处理中心连接。
18.进一步,无线通讯模块采用spi无线模块。
19.进一步,膝关节内侧传感单元、膝关节外侧传感单元、踝关节内侧传感单元和踝关节外侧传感单元的型号为mpu9250。
20.与现有技术相比,本实用新型具有以下有益的技术效果:
21.本实用新型公开了一种下肢力线角度的测量系统,包括膝关节固定架、踝关节固定架和数据处理中心,在膝关节固定架两侧设有传感单元,在踝关节固定架两侧设有传感单元,4个传感单元与数据处理中心连接,数据处理中心对接收的传感单元数据并进行融合计算,得出股骨髋臼窝-膝关节中心连线和髋臼窝-踝关节中心连线,得到下肢力线的角度及偏移程度;采用膝关节固定架固定于人体膝关节,采用踝关节固定架固定于人体踝关节,医务人员无需手持力线测量件对下肢力线定位,提高了下肢力线定位的准确性,并且避免了医务人员在手持力线测量件中需要承受高剂量x光辐射的问题了;本实用新型的下肢力线角度的测量系统,采用成对传感器固定于膝关节和踝关节,便于运动过程中精确测量人体股骨头中心点、膝关节中心点和踝关节中心点,解决了现有设备无法精确确定膝关节和踝关节中心点的问题;采用小型传感单元进行无线数据传输,消除了临床上传统的复杂测量装置,操作简单,易于使用;传感单元固定于关节外侧,无需通过手术将传感器固定于骨骼,解决了此前装置的侵入性问题;数据处理中心可实时接收各定位装置的运动数据,计算出所需要的目标关节中心,进而计算出实时下肢力线及下肢力线偏移角度,得出需要通过手术矫正的角度,具有术前、术中及术后实时监测下肢力线的优点。
22.进一步,固定传感器的装置分别为膝关节和踝关节的内外护体,膝关节与踝关节的内外护体通过膝关节和踝关节的骨性突起固定于下肢。固定支架的弹性固定本体可通过人为控制调节支架的大小,使支架能够自由匹配不同病人的下肢尺寸,具有穿戴轻松、操作简单、实用方便的优点。
附图说明
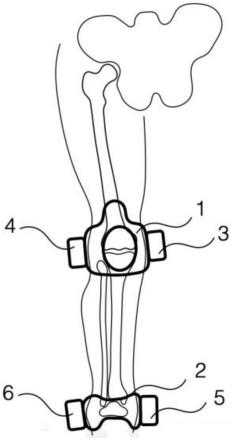
23.图1为本实用新型的下肢力线角度的测量系统的结构示意图;
24.图2为本实用新型的下肢力线角度的测量系统中膝关节固定架示意图;
25.图3为图2的侧视图;
26.图4为本实用新型的下肢力线角度的测量系统中踝关节固定架示意图;
27.图5为图4的侧视图;
28.图6为本实用新型的下肢力线角度示意图;
29.图7为本实用新型的下肢晃动过程中力线角度检测示意图;
30.图8为本实用新型的下肢力线计算流程原理示意图。
31.其中:1为膝关节弹性固定本体,2为踝关节弹性固定本体,3为膝关节内侧传感单元,4为膝关节外侧传感单元,5为踝关节内侧传感单元,6为踝关节外侧传感单元,7为弹簧,8为膝关节内护体,9为膝关节外护体,10为股骨头中心,11为膝关节中心,12为踝关节中心;13为踝关节内护体,14为踝关节外护体。
具体实施方式
32.下面结合具体的实施例对本实用新型做进一步的详细说明,所述是对本实用新型的解释而不是限定。
33.如图1所示,本实用新型公开了一种下肢力线角度的测量系统,包括传感单元、膝关节固定架、踝关节固定架、数据处理中心及显示模块。
34.传感单元,用于监测下肢大腿、小腿及关节处的运动情况,输出加速度、角度等原始数据,并通过集成于传感单元的无线传输模块将数据输出至数据处理中心;
35.膝关节固定架,包括自带弹性的膝关节半包裹弹性支架即膝关节弹性固定本体1,用于将两个传感单元精准固定在膝关节两侧的高位。医务人员晃动下肢时,可以通过融合两个传感单元的数据,定位股骨头中心10以及膝关节中心11;
36.踝关节固定架,包括自带弹性的踝关节半包裹弹性支架即踝关节弹性固定本体2,用于将两个传感单元精准固定在关节两侧的高位。医务人员晃动下肢时,可以通过融合两个传感单元的数据,定位股骨头中心10以及踝关节中心12;
37.数据处理中心,无线接收传感单元的数据并进行融合计算,得出股骨髋臼窝-膝关节中心连线,髋臼窝-踝关节中心连线,计算下肢力线的角度及偏移程度;
38.显示端界面,用于实时显示下肢力线,便于手术中实时进行调整。
39.如图2-3所示,膝关节固定架包括膝关节弹性固定本体1,在膝关节弹性固定本体1的一侧设有膝关节内侧传感单元3,另一侧设有膝关节外侧传感单元4;膝关节固定架还包括膝关节内护体8和膝关节外护体9,膝关节内护体8连接在膝关节弹性固定本体1的一侧,膝关节外护体9连接在膝关节弹性固定本体1的另一侧;膝关节内侧传感单元3固定在膝关节内护体8上,膝关节外侧传感单元4固定在膝关节外护体9上。
40.如图4-5所示,踝关节固定架包括踝关节弹性固定本体2,在踝关节弹性固定本体2的一侧设有踝关节内侧传感单元5,另一侧设有踝关节外侧传感单元6。踝关节固定架还包括踝关节内护体13和踝关节外护体14,踝关节内护体13连接在踝关节弹性固定本体2的一侧,踝关节外护体14连接在踝关节弹性固定本体2的另一侧;踝关节内侧传感单元5固定在
踝关节内护体13上,踝关节外侧传感单元6固定在踝关节外护体14上。
41.如图3和图5所示,膝关节弹性固定本体1和踝关节弹性固定本体2内设有弹簧7,保证了两固定本体的长度可调节,可根据不同患者腿部的粗细进行调整。
42.所述传感单元固定于膝关节固定架和踝关节固定架,膝关节固定架卡在膝关节处,将传感单元固定于膝关节和踝关节的内外高点,通过手持患者下肢从静止加速运动,传感单元采集关节运动数据,通过无线传输模块将数据传送至处理中心,分别确定、计算两条连线夹角,确定下肢力线。
43.测定下肢力线时,患者膝关节伸直状态,测试人员手持患者下肢从静止加速运动,四个传感单元采集关节运动数据,无线传送至数据处理中心,分别确定股骨髋臼窝-膝关节中心连线、髋臼窝-踝关节中心连线,计算两条连线夹角,评估力线状态,可用于关节置换等骨科术前术后评估或术中矫正力线。该系统采用小型传感单元进行无线数据传输,消除了临床上传统的复杂测量装置,操作简单,易于使用。
44.通过分别在膝关节和踝关节成对布置传感器,精确检测关节的中心点和股骨髋臼窝的中心点,通过计算股骨髋臼窝-膝关节中心连线,髋臼窝-踝关节中心连线,计算下肢力线的角度及偏移程度;多点布置传感单元,避免了必须将传感器直接固定于骨骼的问题。
45.膝关节内侧传感单元3和膝关节外侧传感单元4将采集到的膝关节运动数据发送给数据处理中心,数据处理中心计算出膝关节中心11;踝关节内侧传感单元5和踝关节外侧传感单元6将采集到的踝关节运动数据发送给数据处理中心,数据处理中心计算出踝关节中心12。
46.数据处理中心确定膝关节中心11和踝关节中心12的具体过程为:
47.首先计算4个传感器的旋转半径;
48.然后以旋转中心为原点建立一个统一的坐标系,确定每个传感器在该坐标系下的位置。根据膝关节内侧传感单元3和膝关节外侧传感单元4在该坐标下的位置得到膝关节中心11;根据踝关节内侧传感单元5和踝关节外侧传感单元6在该坐标下的位置得到踝关节中心12。
49.如图6-8所示,膝关节中心11到股骨头中心10的连线为股骨髋臼窝-踝关节中心连线,记为第一连线,计算出第一连线的距离l1;踝关节中心12到股骨头中心10的连线为髋臼窝-踝关节中心连线,记为第二连线,计算出第二连线的距离l2。
50.将膝关节中心11投影至第二连线上,股骨头中心10、膝关节中心11的投影点、踝关节中心12可确定一个三角形,计算膝关节中心11投影点到第二连线的距离l3。
51.根据l1和l3计算出第一连线和第二连线的夹角β。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1