一种腹腔镜手术机器人协作系统的制作方法
1.本实用新型涉及腹腔镜手术技术领域,具体而言,涉及一种腹腔镜手术机器人协作系统。
背景技术:
2.腹腔镜手术与传统手术相比,深受患者的欢迎,尤其是术后瘢痕小、又符合美学要求,青年病人更乐意接受,微创手术是外科发展的总趋势和追求目标。现有的腹腔镜手术一般采用四臂机器人或多个单臂机器人持内窥镜和手术器械进行操作,采用四臂机器人由于机械臂集中布置,使得各机械臂的移动空间受限,容易出现互相干涉,采用多个单臂机器人则又会存在占用空间大,在手术室有限空间下,不利于手术操作的进行,无法完成较复杂的手术操作。
技术实现要素:
3.本实用新型旨在提出一种腹腔镜手术机器人协作系统,以解决上述技术问题。
4.为达到上述目的,本实用新型的技术方案是这样的:
5.一种腹腔镜手术机器人协作系统,包括第一手术机器人和第二手术机器人,所述第一手术机器人包括三个第一机械臂,所述第二手术机器人包括单个第二机械臂,所述第一机械臂及所述第二机械臂均包含多个自由度,三个所述第一机械臂用于夹持第一手术器械及腹腔镜,单个所述第二机械臂用于夹持第二手术器械以辅助所述第一手术机器人。
6.本实用新型所述的腹腔镜手术机器人协作系统,通过具有三个第一机械臂的第一手术机器人持腹腔镜及第一手术器械,具有单个第二机械臂的第二手术机器人持第二手术器械,各手术机器人共同协作,解放医生双手,无需医生助手参与,且第一机械臂、第二机械臂具有多个自由度,能够完成较复杂的手术操作;相较于四臂机器人,采用三个第一机械臂的第一机器人与单个第二机械臂的第二机器人布置方式,第一机械臂的布置较为松散,各第一机械臂的移动空间较大,不易出现干涉;相较于多个单臂机器人的布置方式能够极大程度上减少手术室的空间占用,够保证手术操作的顺利完成。
7.可选地,所述第二机械臂包括六轴协作机械臂、主动臂及滑台机构,所述六轴协作机械臂的一端与所述主动臂的一端转动连接,所述主动臂的另一端转动连接有所述滑台机构,所述滑台机构适于夹持所述第二手术器械。
8.可选地,所述六轴协作机械臂适于带动所述主动臂摆动,所述主动臂包括依次设置的第一支臂、第二支臂及第三支臂,所述第一支臂的一端与所述第二支臂的一端适于绕第一轴线转动连接,所述第二支臂的另一端与所述第三支臂的一端适于绕第二轴线转动连接,所述第三支臂的另一端与所述滑台机构适于绕第三轴线转动连接,所述第一轴线、第二轴线及第三轴线相对平行,所述主动臂适于带动所述滑台机构摆动。
9.可选地,所述第二机械臂还包括转接板,所述转接板设置于所述六轴协作机械臂与所述主动臂之间。
10.可选地,所述转接板采用连接法兰。
11.可选地,所述滑台机构包括滑轨、滑台及卡爪,所述滑轨与所述主动臂转动连接,所述滑轨的一端绕第四轴线与所述卡爪转动连接,所述底座上设有卡爪,所述滑台设置于所述滑轨上且适于相对所述滑轨滑动,所述滑台适于与所述第二手术器械的一端固定,所述第二手术器械的另一端适于穿过所述卡爪,所述卡爪适于相对所述滑轨翻转以使所述第二手术器械从所述卡爪脱离。
12.可选地,所述第二手术机器人还包括台车,所述六轴协作机械臂安装在所述台车上。
13.可选地,该腹腔镜手术机器人协作系统还包括控制台,所述第一手术机器人与所述第二手术机器人连接到同一所述控制台,或者,所述第一手术机器人与所述第二手术机器人分别连接到不同的所述控制台。
14.可选地,该腹腔镜手术机器人协作系统还包括图像处理平台,所述图像处理平台适于与所述第一手术器械和/或所述第二手术器械连接。
15.可选地,该腹腔镜手术机器人协作系统还包括器械车,所述器械车用于放置所述第一手术器械及所述第二手术器械。
附图说明
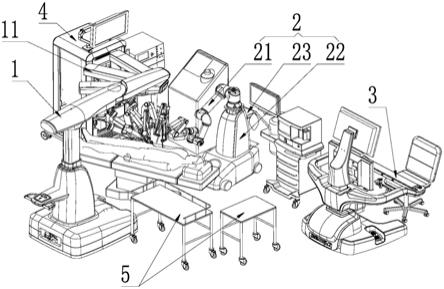
16.图1为本实用新型实施例的腹腔镜手术机器人协作系统的示意图;
17.图2为本实用新型实施例的第二手术机器人的结构示意图;
18.图3为本实用新型实施例的第二机械臂的局部结构示意图。
19.附图标记说明:
20.1、第一手术机器人;11、第一机械臂;2、第二手术机器人;21、第二机械臂;211、六轴协作机械臂;212、主动臂;2121、第一支臂;2122、第二支臂;2123、第三支臂;213、滑台机构;2131、滑轨;2132、滑台;2133、卡爪;214、转接板;22、台车;23、控制面板;3、控制台;4、图像处理平台;5、器械车;6、第二手术器械。
具体实施方式
21.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
22.在本实用新型的描述中,应当说明的是,各实施例中的术语名词例如“上”、“下”、“前”、“后”等指示方位的词语,只是为了简化描述基于说明书附图的位置关系,并不代表所指的元件和装置等必须按照说明书中特定的方位和限定的操作及方法、构造进行操作,该类方位名词不构成对本实用新型的限制。
23.另外,在本实用新型的实施例中所提到的术语“第一”、“第二”仅用于描述目的,并不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
24.本文中设置有坐标系xyz,其中x轴的正向代表右方向,x轴的反向代表左方向,y轴的正向代表前方向,y轴的反向代表后方向,z轴的正向代表上方,z轴的反向代表下方。
25.如图1所示,本实用新型实施例的一种腹腔镜手术机器人协作系统,包括第一手术
机器人1和第二手术机器人2,所述第一手术机器人1包括三个第一机械臂11,所述第二手术机器人2包括单个第二机械臂21,所述第一机械臂11及所述第二机械臂21均包含多个自由度,三个所述第一机械臂11用于夹持第一手术器械及腹腔镜,单个所述第二机械臂21用于夹持第二手术器械6以辅助所述第一手术机器人1。
26.在本实施例中,患者躺在手术床上,所述第一手术机器人1与所述第二手术机器人2围绕在手术床周围,第一手术机器人1及第二手术机器人2可根据手术类型灵活选择占位位置,在手术过程中可移动。
27.所述第一手术机器人1采用三臂机器人,相较于四臂机器人而言,三个第一机械臂11能够保证其各自具有较大的运动空间,避免干涉,三个第一机械臂11中的其中一个用于持腹腔镜,另两个第一机械臂11用于持第一手术器械,以完成较为简单的手术操作。所述第二手术机器人2具有单个第二机械臂21的机器人,体积小,占用空间小,第一机械臂11及第二机械臂12均具有多个自由度,第二手术机器人2辅助所述第一手术机器人1完成较为复杂的手术操作,无需医生助手的参与。
28.示例性地,所述第二手术机器人2可以持电剪刀、持针钳或电钩等,可根据不同的手术需要进行灵活选择更换。为了保证手术室的操作空间,所述第二手术机器人2的数量不适宜设置地过多,优选设置1个第二手术机器人2。
29.可选地,如图2所示,所述第二机械臂21包括六轴协作机械臂211、主动臂212及滑台机构213,所述六轴协作机械臂211的一端与所述主动臂212的一端转动连接,所述主动臂212的另一端转动连接有所述滑台机构213,所述滑台机构213适于夹持所述第二手术器械6。
30.在本实施例中,所述六轴协作机械臂211的工作半径大于900mm,具有多个自由度,所述六轴协作机械臂211带动所述主动臂212运动,进而能够实现带动所述第二手术器械6旋转、平移,所述六轴协作机械臂211的六个关节均采用一体化关节,每个所述一体化关节包括外壳、谐波减速器、电机、抱闸器、编码器及低压直流驱动器等基本部件。
31.所述主动臂212能够实现较高精度的调节,在远心控制过程中,保证所述第二手术器械6沿着切口小幅度运动。所述滑台机构213可驱动所述第二手术器械6移动,进一步提高所述第二手术器械6的移动自由度。
32.可选地,如图3所示,所述六轴协作机械臂211适于带动所述主动臂212摆动,所述主动臂212包括依次设置的第一支臂2121、第二支臂2122及第三支臂2123,所述第一支臂2121的一端与所述第二支臂2122的一端适于绕第一轴线转动连接,所述第二支臂2122的另一端与所述第三支臂2123的一端适于绕第二轴线转动连接,所述第三支臂2123的另一端与所述滑台机构213适于绕第三轴线转动连接,所述第一轴线、第二轴线及第三轴线相对平行,所述主动臂212适于带动所述滑台机构213摆动。
33.在本实施例中,所述第一支臂2121、所述第二支臂2122及所述第三支臂2123构成z字型,所述第二支臂2122绕第一轴线l1相对所述第一支臂2121转动,所述第三支臂2123绕第二轴线l2相对于所述第二支臂2122转动,所述滑台机构213绕第三轴线l3相对所述第三支臂2123转动,各所述支臂的转动轴线相对平行。所述第一支臂2121与所述第三支臂2123之间连接有第一连杆,所述第二支臂2122与所述滑台机构213之间连接有第二连杆。
34.所述第二支臂2122绕所述第一轴线转动时,在第二连杆的限制下,所述滑台机构
213随所述第二支臂2122同步摆动,从而使得所述第二手术器械6能够围绕患者切口做微小摆动,保证手术操作的精准度。
35.可选地,如图3所示,所述第二机械臂21还包括转接板214,所述转接板214设置于所述六轴协作机械臂211与所述主动臂212之间。
36.在本实施例中,通过在所述六轴协作机械臂211的末端通过所述转接板214与所述主动臂212的基座连接,提高所述六轴协作机械臂211与所述主动臂212之间的连接稳固性,示例性地,所述转接板214采用连接法兰,方便拆装。
37.可选地,如图3所示,所述滑台机构213包括滑轨2131、滑台2132及卡爪2133,所述滑轨2131与所述主动臂212转动连接,所述滑轨2131的一端绕第四轴线与所述卡爪2133转动连接,所述滑台2132设置于所述滑轨2131上且适于相对所述滑轨2131滑动,所述滑台2132适于与所述第二手术器械6的一端固定,所述第二手术器械6的另一端适于穿过所述卡爪2133,所述卡爪2133适于相对所述滑轨2131翻转以使所述第二手术器械6从所述卡爪2133脱离。
38.在本实施例中,所述滑轨2131的右侧端面与所述主动臂212连接,所述滑轨2131的左侧端面侧设有滑台2132,所述滑台2132可沿着所述滑轨2131的长度方向移动,所述第二手术器械6的上端与所述滑台2132固定,所述第二手术器械6的下端穿过所述卡爪2133以伸向患者切口。在手术时,所述第二手术器械6的下端通过卡爪2133箍紧,提高第所述第二手术器械6夹持的稳定性。
39.所述第四轴线l4沿y轴所示方向(也即与滑台2132滑动方向相垂直的方向)设置,当需要更换所述第二手术器械6时,所述卡爪2133打开,松开对所述第二手术器械6下端的紧固,然后所述卡爪2133整体相对所述滑轨2131向右侧翻转,使得所述第二手术器械6从所述卡爪2133的开口脱出,方便更换所述第二手术器械6。
40.可选地,如图1-2所示,所述第二手术机器人2还包括台车22,所述六轴协作机械臂211安装在所述台车22上。
41.在本实施例中,所述六轴协作机械臂211的下端安装在所述台车22上,所述台车22带动所述第二机械臂21整体在手术室内运动。所述台车22上安装有控制面板23,所述控制面板23可设启动按钮、急停按钮及复位按钮等,以控制所述第二手术机器人2的运动。为了避免控制面板23的设置影响所述第二机械臂21的运动自由度,优选地,在所述台车22远离所述六轴协作机械臂211运动范围的一侧设置所述控制面板23。
42.可选地,如图1所示,该腹腔镜手术机器人协作系统还包括控制台3,所述第一手术机器人1与所述第二手术机器人2连接到同一所述控制台3,或者,所述第一手术机器人1与所述第二手术机器人2分别连接到不同的所述控制台3。
43.在本实施例中,当所述第一手术机器人1与所述第二手术机器人2连接到同一所述控制台3,此时只需要一个医生,就可实现对两个手术机器人的控制,高效完成手术操作,而且也方便医生在两个手术机器人的控制之间进行灵活切换。当所述第一手术机器人1与所述第二手术机器人2分别连接一所述控制台3时,此时需要两个医生配合共同操作手术。
44.可选地,如图1所示,该腹腔镜手术机器人协作系统还包括图像处理平台4,所述图像处理平台4适于与所述第一手术器械连接和/或所述第二手术器械6连接。
45.在本实施例中,图像处理平台4对第一手术机器人1及第二手术机器人2进行的操
作进行图像呈现,护士通过对应的图像处理平台上的触摸屏可查看内窥镜图像,方便实时调整手术操作。
46.当然地,在所述控制台3上也安装有显示内窥镜图像的显示装置,控制台3上的显示装置主要为医生观察手术情况使用。
47.可选地,如图1所示,该腹腔镜手术机器人协作系统还包括器械车5,所述器械车5用于放置所述第一手术器械及所述第二手术器械6。
48.在本实施例中,所述器械车5设置在手术床的周围,用于放置本次手术中要用到的手术器械,可移动,方便医生随时取用、更换器械。
49.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1