一种用于手术机器人的机械臂及手术机器人的制作方法
一种用于手术机器人的机械臂及手术机器人
【技术领域】
1.本实用新型涉及医疗器械技术领域,尤其涉及一种用于手术机器人的机械臂及手术机器人。
背景技术:
2.微创医疗技术旨在减少医疗程序期间被损坏的组织的量,从而减少患者恢复时间、减轻患者不适并且减少有害的副作用。此类微创技术可以通过患者解剖结构中的自然孔口或通过一个或多个手术切口来执行。临床医生可以将医疗工具插入通过这些自然孔口或切口,以到达目标组织部位。pci手术机器人就是医疗工具中的一种,pci手术机器人是用于经皮冠状动脉介入治疗中的医疗器械,在传统的pci手术中,手术医生长期暴露在x射线的电离辐射下,需要穿戴铅衣减少电离辐射。铅衣的使用虽然能够减少电离辐射,但同时增加了医生的负重,长期以往会对手术医生的骨骼系统产生巨大损伤,因此pci手术机器人应运而生,它能够完全模拟医生的操作动作,让医生在远端完成手术。
3.目前手术机器人一般均由主梁,直线导轨,和平台连接来实现对导管导丝的前进,后退,夹紧,旋转控制。这种结构基本均为一体式可移动平台,无法做到灵活搭配,以及多角度控制。
技术实现要素:
4.本实用新型的目的是克服上述至少一个技术问题,提供一种手术机器人的机械臂及手术机器人。
5.为了实现上述目的,本实用新型提供一种用于手术机器人的机械臂,包括:底座、z轴支撑臂、至少一个水平轴、挂臂、以及导轨安装平台;
6.所述z轴支撑臂安装于所述底座,所述水平轴可转动的连接于所述z轴支撑臂的顶端,所述挂臂可转动连接于所述水平轴末端,所述导轨安装平台可转动的连接于所述挂臂的末端;
7.所述导轨安装平台上设置有多个导轨,所述导轨安装平台可选择的安装预设数量的子传输机构。
8.优选的,所述水平轴包括:与所述z轴支撑臂顶端连接的水平一轴、和与所述水平一轴末端连接的水平二轴。
9.优选的,所述z轴支撑臂顶端与所述水平一轴之间通过第一离合器传动连接,所述水平一轴与所述水平二轴之间通过第二离合器传动连接。
10.优选的,所述挂臂与所述水平二轴通过第三离合器传动连接。
11.优选的,所述导轨安装平台通过第四离合器与所述挂臂传动连接。
12.优选的,所述第一离合器、第二离合器、第三离合器、第四离合器均为电磁离合器。
13.优选的,所述底座设置有脚轮组件。
14.本实用新型还提供一种手术机器人,包括:
15.传输机构,所述传输机构包括多个子传输机构,每个所述子传输机构与所述从控制器信号连接,从所述从控制器处接收转发的所述控制信号;
16.多个手术器械组件,每个所述手术器械组件与一个所述子传输机构传动连接,其运动受控于所述子传输机构的传动控制;
17.所述手术机器人还包括机械臂,所述机械臂包括:底座、z轴支撑臂、至少一个水平轴、挂臂、以及导轨安装平台;所述z轴支撑臂安装于所述底座,所述水平轴可转动的连接于所述z轴支撑臂的顶端,所述挂臂可转动连接于所述水平轴末端,所述导轨安装平台可转动的连接于所述挂臂的末端;所述导轨安装平台上设置有多个导轨,所述导轨安装平台可选择的安装预设数量的所述子传输机构。
18.优选的,所述水平轴包括:与所述z轴支撑臂顶端连接的水平一轴、和与所述水平一轴末端连接的水平二轴,所述z轴支撑臂顶端与所述水平一轴之间通过第一离合器传动连接,所述水平一轴与所述水平二轴之间通过第二离合器传动连接,所述挂臂与所述水平二轴通过第三离合器传动连接,所述导轨安装平台通过第四离合器与所述挂臂传动连接。
19.优选的,所述第一离合器、第二离合器、第三离合器、第四离合器均为电磁离合器。
20.与相关技术相比,本实用新型由于采用具有多自由度的机械臂结构、以及配置具有多导轨的安装平台,可以实现手术机器人传输机构的多角度控制,同时,还能依据手术的需求灵活的搭配传输机构的数量(如导丝传输机构)。
【附图说明】
21.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
22.图1为本实用新型提供的机械臂结构示意图;
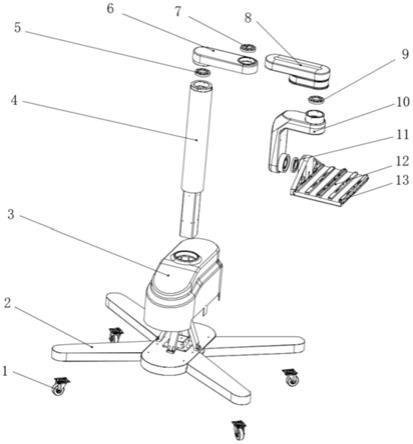
23.图2为图1机械臂的爆炸图。
【具体实施方式】
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
25.实施例一
26.请参阅图1-2所示,本实用新型实施例提供一种用于手术机器人的机械臂,其用于手术机器人子传输机构的的承载和控制,具体的,该机械臂包括:底座3、z轴支撑臂4、至少一个水平轴(6、8)、挂臂10、以及导轨安装平台12;所述z轴支撑臂4安装于所述底座3,所述水平轴可转动的连接于所述z轴支撑臂4的顶端,所述挂臂10可转动连接于所述水平轴末端,所述导轨安装平台12可转动的连接于所述挂臂10的末端;所述导轨安装平台12上设置有多个导轨13,所述导轨安装平台12可选择的安装预设数量的子传输机构(图中未示出)。
27.在本实施例中,所述水平轴包括:与所述z轴支撑臂4顶端连接的水平一轴6、和与
所述水平一轴6末端连接的水平二轴8。其中,所述z轴支撑臂4顶端与所述水平一轴6之间通过第一离合器5传动连接,所述水平一轴6与所述水平二轴8之间通过第二离合器7传动连接。
28.在本实施例中,所述挂臂10与所述水平二轴8通过第三离合器9传动连接。
29.在本实施例中,所述导轨安装平台12通过第四离合器11与所述挂臂10传动连接。
30.在本实施例中,所述第一离合器、第二离合器、第三离合器、第四离合器均为电磁离合器,通过控制电磁离合器的离合状态,可以分半单独的控制水平一轴6、水平二轴8、挂臂10以及导轨安装平台12进行运动。
31.进一步的,本实施例中,所述底座3还设置有脚轮组件,该脚轮组件包括支架2和脚轮1,脚轮组件的设置有利于不同场景的使用,便于进行位置调换。
32.基于以上机械臂,本实用新型还提供一种手术机器人,包括:其包括传输机构、多个手术器械组件以及上述的机械臂。
33.具体的,所述传输机构包括多个子传输机构,每个所述子传输机构与所述从控制器信号连接,从所述从控制器处接收转发的所述控制信号;每个所述手术器械组件与一个所述子传输机构传动连接,其运动受控于所述子传输机构的传动控制。
34.与相关技术相比,本实用新型由于采用具有多自由度的机械臂结构、以及配置具有多导轨的安装平台,可以实现手术机器人传输机构的多角度控制,同时,还能依据手术的需求灵活的搭配传输机构的数量(如导丝传输机构)。
35.以上所述的仅是本实用新型的实施方式,在此应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出改进,但这些均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1