手术导航适配器
1.本技术涉及医疗设备领域,具体涉及一种手术导航适配器。
背景技术:
2.在导航手术或机器人导航手术中,一个重要的过程是将医生所用的手术器械,如穿刺针、钻头、超声骨刀以及电钻等其他工具,进行空间位置标定,从而确定手术器械相对于患者解剖结构的三维空间位置。空间位置标定首先需要将导航参考架附着于手术器械上,获取手术器械刚体的空间位置,计算其尖端的位置、轴线的方向以及其前部工具的大小尺寸等几何信息。由于不同厂家的配套手术器械的差异性较大,因此手术导航中大都使用专用的导航手术器械,这些器械的尺寸和尖端位置等信息与附着的导航参考架位置均在出厂前进行严格标定,标定文件储存在导航软件中。但通过这种方式,只能利用少数的手术器械,通用适配性较差,或者导致工具臃肿繁多,并且如果参考架朝向角度不合适,会影响手术进程。
技术实现要素:
3.基于上述问题,本技术提供了一种手术导航适配器,便于附着在多种类型的手术工具上。
4.本技术的一个实施例提供一种手术导航适配器,包括:支撑柱;万向支架,所述万向支架的一端与所述支撑柱铰接;反光球支架,设置于所述万向支架上;多个反光球,设置于所述反光球支架的顶面;锁紧结构,设置于所述支撑柱上,所述锁紧结构用于锁紧所述万向支架与支撑柱的连接,并将所述支撑柱锁紧在手术工具上。
5.根据本技术的一些实施例,所述支撑柱与所述万向支架铰接的一端设有支架安装孔,所述万向支架的铰接一端设有球头,所述球头铰接于所述支架安装孔。
6.根据本技术的一些实施例,所述支撑柱包括第一滑道和第二滑道,所述第一滑道由所述支架安装孔延伸至所述支撑柱与所述支架安装孔相对的端面,所述第二滑道与所述第一滑道连通,所述第二滑道的轴线垂直于所述第一滑道的轴线;所述锁紧结构包括:压紧块,设置于所述支架安装孔的底部,所述压紧块的表面设有与所述万向支架的球头相适配的凹槽;端盖,设置于所述支架安装孔中,所述端盖上设有通孔,所述球头位于所述端盖与所述压紧块之间,所述万向支架穿过所述端盖的通孔,所述端盖能够卡住所述球头;卡钩,设置于所述支撑柱与所述支架安装孔相对的一端;压紧螺杆,可滑动的设置于所述第二滑道,所述压紧螺杆包括螺纹杆和压头,所述压头设置所述螺纹杆的一端,所述螺纹杆的另一端延伸出所述第二滑道;第一滑块,可滑动的设置于所述第一滑道中,所述第一滑块的一端为楔形,所述第一滑块的楔形一端与所述压紧螺杆接触,所述第一滑块的另一端与所述压紧块接触;第二滑块,可滑动的设置于所述第一滑道中,所述第二滑块的一端为楔形,所述第二滑块的楔形一端与所述压紧螺杆接触,所述第二滑块的另一端与所述卡钩配合,能够将所述支撑柱锁紧在手术工具上;第一螺母,与所述螺纹杆延伸出所述第二滑道的一端相
适配。
7.根据本技术的一些实施例,所述卡钩为半圆形。
8.根据本技术的一些实施例,所述锁紧结构包括第一锁紧结构和第二锁紧结构,所述第一锁紧结构用于锁紧所述万向支架与支撑柱的连接,所述第二锁紧结构用于将所述支撑柱锁紧在手术工具上。
9.根据本技术的一些实施例,所述支撑柱对应所述支架安装孔的外壁上设有第一外螺纹,所述支架安装孔的孔壁上设有多个豁口,所述第一锁紧结构包括第二螺母,所述第二螺母与所述第一外螺纹相适配,旋转所述第二螺母能够使所述支架安装孔的孔壁压紧所述球头。
10.根据本技术的一些实施例,所述支撑柱的外壁上设有第二外螺纹,所述第二锁紧结构包括:支撑块,设置于所述支撑柱与所述支架安装孔相对的一端;滑套,可滑动的套在所述支撑柱上;夹紧杆,铰接于所述支撑块上;传动杆,所述传动杆的一端与所述滑套铰接,所述传动杆的另一端与所述夹紧杆铰接;加压螺母,与所述支撑柱的第二外螺纹相适配,所述加压螺母连接所述滑套;其中,所述夹紧杆和传动杆的数量均为至少两个。
11.根据本技术的一些实施例,所述第二锁紧结构还包括胶垫,所述胶垫设置于所述夹紧杆的自由端。
12.根据本技术的一些实施例,所述反光球支架上设有立柱,所述反光球设置于所述立柱上。
13.根据本技术的一些实施例,所述手术导航适配器还包括反光球座,所述反光球设置在所述反光球座上,所述反光球座设置于所述立柱上。
14.本技术的手术导航适配器,通过万向支架与支撑柱铰接可调整反光球相对导航相机的角度,避免因为反光球的角度问题影响手术的进行;通过锁紧件将手术导航适配器固定在手术工具上,可适配多种手术工具,便于后续对手术工具进行空间位置标定。
附图说明
15.为了更清楚地说明本技术的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
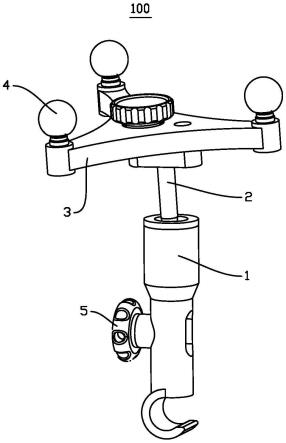
16.图1是本技术实施例一种手术导航适配器的示意图;
17.图2是本技术实施例支撑柱与万向支架的示意图;
18.图3是本技术实施例支撑柱的剖视图;
19.图4是本技术实施例一种手术导航适配器的剖视图;
20.图5是本技术实施例压紧块的示意图;
21.图6是本技术实施例端盖的示意图;
22.图7是本技术实施例压紧螺杆的示意图;
23.图8是本技术实施例一种手术导航适配器安装在手术工具的示意图;
24.图9是本技术实施例另一种手术导航适配器的示意图;
25.图10是本技术实施例一种支架安装孔的示意图;
26.图11是本技术实施例一种锁紧结构的示意图;
27.图12是本技术实施例滑套与加压螺母的示意图;
28.图13是本技术实施例另一种手术导航适配器安装在手术工具的示意图;
29.图14是本技术实施例反光球支架的示意图;
30.图15是本技术实施例反光球座的示意图。
具体实施方式
31.下面结合本技术实施例中的附图,对本技术的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
32.实施例1
33.如图1所示,本实施例提供一种手术导航适配器100,手术导航适配器100包括:支撑柱1、万向支架2、反光球支架3、反光球4和锁紧结构5。手术导航适配器100可牢固地附着于多种规格的手术工具上,适用性强。
34.本实施例的支撑柱1的外形近似为圆柱状,根据需求也可将支撑柱1设置为其他形状。万向支架2的底端与支撑柱1的顶端铰接。反光球支架3设置于万向支架2的顶端。多个反光球4设置于反光球支架3的顶面。反光球4的数量为至少三个,至少三个反光球不共线不对称的设置。手术机器人的导航相机可识别反光球。锁紧结构5设置于支撑柱1上,锁紧结构5用于锁紧万向支架2与支撑柱1的连接,并将支撑柱1锁紧在手术工具上。
35.通过锁紧结构5将支撑柱1锁紧在手术工具上,锁紧结构5还可将万向支架2与支撑柱1的铰接锁定。通过转动万向支架2可调整反光球4相对导航相机的角度,便于导航相机识别反光球4,将反光球4调整到位后通过锁紧结构5锁定万向支架2,可避免因为反光球4的角度问题影响手术的进行。手术机器人的导航系统根据多个反光球4的位置可实时确定手术工具的空间位置。
36.如图2所示,支撑柱1的铰接一端设有支架安装孔11,本实施例中,支架安装孔11的轴线与支撑柱1的轴线重合。万向支架2包括球头21、连接杆22和顶块23,球头21位于连接杆22的一端,顶块23位于连接杆22的另一端。球头21所在端作为万向支架2的铰接一端,球头21设置于支撑柱1的支架安装孔11中,实现万向支架2与支撑柱的铰接。万向支架2通过球头21与支撑柱1铰接,使万向支架2能够实现多个方向的转动,便于调整反光球4的角度。
37.如图3和图4所示,支撑柱1的内部设有第一滑道12和第二滑道13。第一滑道12由支架安装孔11的底面延伸至支撑柱1与支架安装孔11相对的端面。第二滑道13与第一滑道12连通,第二滑道13的轴线垂直于第一滑道12的轴线,第二滑道13基本位于第一滑道12的中间位置。本实施例中,在支撑柱1的外壁上设置凸台14,凸台14沿第二滑道13的轴线延伸,第二滑道13贯通凸台14。
38.锁紧结构5包括:压紧块51、端盖52、卡钩53、压紧螺杆54、第一滑块55、第二滑块56和第一螺母57。
39.如图4和图5所示,压紧块51设置于支架安装孔11的底部。压紧块51的顶面设有半球形的凹槽511,万向支架的球头21与凹槽511相适配,球头21能在凹槽511中转动。
40.如图6所示,端盖52设置于支架安装孔11的顶部,端盖52可卡入支架安装孔11中,也可通过螺纹连接安装在支架安装孔11中。端盖52上设有通孔521。本实施例中,通孔521的底部为球面,与球头21相适配。通孔521的顶部为喇叭状,通孔521的球面部分与喇叭状部分之间为圆柱面。通孔521的圆柱面部分的直径小于球头21的最大直径,万向支架2的连接杆22穿过端盖的通孔521,端盖52能够卡住球头21,不允许球头21移出支架安装孔11,实现万向支架2与支撑柱1的铰接。通孔521的喇叭状部分可限制万向支架2的调整角度,本实施例中,万向支架2的万向调节角度为30
°
。
41.卡钩53设置于支撑柱1与支架安装孔11相对的一端,卡钩53用于与手术工具的连接。
42.如图7所示,压紧螺杆54可滑动的设置于第二滑道13中。压紧螺杆54包括螺纹杆541和压头542,压头542设置于螺纹杆541的一端,压头542的长度大于螺纹杆541的直径。本实施例中,压头542相对称的两侧壁上分别设有凸块5421。压头542位于第二滑道13与第一滑动12交汇的位置。
43.第一滑块55可滑动的设置于第一滑道12中,第一滑块55位于压头542与压紧块51之间。第一滑块55的一端为楔形,第一滑块55的楔形一端与压紧螺杆54的压头542接触,第一滑块55的另一端与压紧块51接触。本实施例中,压头542与第一滑块55接触一侧的凸块5421位于第一滑块55的楔形端面的滑槽中,可限制第一滑块55出现不必要的旋转。压紧螺杆54沿第二滑道13的轴线移动时,压头542对第一滑块55施力,带动第一滑块55沿第一滑道12的轴线移动,使得第一滑块55可顶紧压紧块51,压紧块51与端盖52夹紧球头21,锁紧万向支架2的转动。
44.第二滑块56可滑动的设置于第一滑道12中,第二滑块56位于压头542与卡钩53之间。第二滑块56的一端为楔形,第二滑块56的楔形一端与压紧螺杆54的压头542接触。本实施例中,压头542与第二滑块56接触一侧的凸块5421位于第二滑块56的楔形端面的滑槽中,可限制第二滑块56出现不必要的旋转。压紧螺杆54沿第二滑道13的轴线移动时,压头542对第二滑块56施力,带动第二滑块56沿第二滑道13的轴线移动时,第二滑块56的非楔形一端可伸出第一滑道12。
45.如图8所示,第二滑块56的非楔形一端伸出第一滑道12,与卡钩53配合,能够将支撑柱1锁紧在手术工具200上。
46.第一螺母57与螺纹杆541延伸出第二滑道13的一端相适配,第一螺母57紧贴凸台14。旋转第一螺母57,压紧螺杆54沿第二滑道13的轴线移动,压紧螺杆54同时挤压第一滑块55和第二滑块56,实现锁定万向支架2和支撑柱1的连接及将手术导航适配器100锁紧在手术工具200上。反向旋转第一螺母57,对万向支架2的锁定及手术导航适配器100与手术工具200的连接同时解锁。
47.本实施例的锁紧结构5设计紧凑,通过压紧螺杆54带动第一滑块55和第二滑块56移动,可同时实现锁定万向支架2和支撑柱1的连接及将支撑柱1锁紧在手术工具200上。
48.根据本技术一个可选的技术方案,卡钩53为半圆形。半圆形的卡钩53与第二滑块56配合适用于具有圆柱体状结构的手术工具。根据需要,卡钩53也可以为其他的形状。
49.实施例2
50.如图9所示,本实施例提供另一种手术导航适配器300,本实例的手术导航适配器
300与实施例1的手术导航适配器100的万向支架2、反光球支架3均相同,两者的区别主要在于锁紧结构的不同。
51.锁紧结构6包括第一锁紧结构61和第二锁紧结构62,其中,第一锁紧结构61用于锁紧万向支架2与支撑柱1的连接,第二锁紧结构62用于将支撑柱1锁紧在手术工具200上。
52.如图10所示,本实施例的支撑柱1上的支架安装孔11为半球状,支架安装孔11与万向支架2的球头21相适配。在支撑柱1对应支架安装孔11的外壁上设有第一外螺纹。支架安装孔11的孔壁上设有多个豁口15,本实施例中多个豁口15绕支撑柱1的轴线圆周均布,豁口15由支架安装孔11所在支撑柱1的端面延伸至支架安装孔11的底部,使得支架安装孔11的孔壁沿支撑柱1的径向可进行微小的弹性变形。
53.第一锁紧结构61包括第二螺母,第二螺母与第一外螺纹相适配。第二螺母不在支架安装孔11对应的支撑柱1的外壁部分时,球头21能够在支架安装孔11内转动,以调整反光球4的角度。将第二螺母旋转至支架安装孔11对应的支撑柱1的外壁部分,第二螺母挤压支架安装孔11的孔壁向内收缩,压紧球头21,万向支架2被锁定,不能再转动。反向旋转第二螺母可解锁万向支架2。
54.如图11所示,根据本技术一个可选的技术方案,支撑柱1的外壁上设有第二外螺纹,第二外螺纹位于第一外螺纹的下方。第二锁紧结构62包括:支撑块621、滑套622、夹紧杆623、传动杆624和加压螺母625。
55.支撑块621设置于支撑柱1与支架安装孔11相对的一端。支撑块621的长度大于支撑柱1的直径。
56.如图12所示,滑套622可滑动的设置于支撑柱1上。本实施例中,滑套622包括圆柱套6221和挂耳6222,两个挂耳6222对称的设置在圆柱套6221的外壁上,圆柱套6221可套在支撑柱1上。挂耳6222的顶面高于圆柱套6221的顶面,挂耳6222靠近圆柱套6221的侧壁上设有卡口6223。
57.加压螺母625与支撑柱1的第二外螺纹相适配。加压螺母625为在常规的螺母底部增加了圆柱台,圆柱台的外壁延伸出凸缘6251。凸缘6251能够卡入滑套622的卡口6223,旋转加压螺母625,可带动滑套622沿支撑柱1的轴线滑动。
58.夹紧杆624的中部通过第一轴铰接于支撑块621上。传动杆623的一端通过第二轴与滑套622铰接,传动杆623的另一端通过第三轴与夹紧杆624的顶端铰接。滑套622沿支撑柱1的轴线滑动时,夹紧杆624的底端作为自由端,绕第一轴摆动。
59.其中,夹紧杆624和传动杆623的数量均为至少两个。本实施例中,两个夹紧杆624对称的设置在支撑块621上,两个传动杆623分别连接两个夹紧杆624。
60.如图13所示,加压螺母625带动滑套622向支撑柱1的支撑块621所在端滑动,两个夹紧杆624的左右端相互靠近,可夹紧手术工具400。加压螺母625带动滑套622向支撑柱1的支架安装孔11所在端滑动,两个夹紧杆624的自由端相互远离,支撑柱1与手术工具400可分离。
61.根据本技术一个可选的技术方案,第二锁紧结构62还包括胶垫626,胶垫626设置于夹紧杆624的自由端。通过胶垫可增加夹紧杆624对手术工具400的把持力,使得手术导航适配器300更牢靠的附着在手术工具400上。
62.本实施例的手术导航适配器300,在使用步骤为:
63.松开第二螺母,将反光球调整至合适的角度后通过第二螺母锁紧万向支架;
64.加压螺母625带动滑套622向支撑柱1的支架安装孔11所在端滑动,两个夹紧杆624的自由端相互远离至合适距离;
65.将手术导航适配器300安装到手术工具400的合适位置,旋转加压螺母625,加压螺母625带动滑套622向支撑柱1的支撑块621所在端滑动,加压螺母625的旋转运动转化为滑套622的线性运动,在通过传动杆623的传递转化为夹紧杆624的摆动,最终两个夹紧杆624配合夹紧手术工具400。
66.如图14所示,一种可选的方案中,反光球支架3的顶面上用于安装反光球4的位置设有立柱31,反光球4设置于立柱31上。例如,反光球4设有与立柱31配合的盲孔,反光球4通过盲孔安装在立柱31上,便于反光球4的装卸。
67.如图15所示,手术导航适配器300还包括反光球座32,反光球4设置在反光球座32顶面的凹槽中,反光球座32上设有立柱31配合的盲孔,立柱31卡入反光球座32的盲孔中固定反光球座32。反光球座32对反光球4起到保护作用,反光球座32与立柱31连接稳定、可靠、便捷。
68.可选地,反光球支架3与万向支架2通过螺栓固定连接。在万向支架2的顶面设有定位柱24,定位柱24与反光球支架3上的定位孔配合对反光球支架3与万向支架2的连接起到定位作用。
69.本技术的手术导航适配器可适配多种手术工具,便于后续对手术工具进行空间位置标定。手术导航适配器可具有多种规格及尺寸,以适配多种手术工具。
70.以上对本技术实施例进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的技术方案及其核心思想。因此,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1