一种步行辅助外骨骼装置
1.本发明涉及机械外骨骼技术领域,尤其涉及一种步行辅助外骨骼装置。
背景技术:
2.近年来,随着机械电子与控制技术的快速发展,进而带动了外骨骼康复机器人的研究。外骨骼不同于矫形器,不能替代使用者的腿部进行支撑,而是在行走时为使用者提供辅助和助力,通过长时间重复的相关运动训练,可代替治疗师的帮助,从而有效降低了康复成本。
3.然而,目前市场上代表性的外骨骼系统,如hal(hybrid assistive limb,混合辅助肢体)、rewalk(下肢外骨骼机器人),多采用刚性连接驱动设计,重量较大,使用时额外负担大,会增加穿戴者的代谢消耗。
4.其他用于康复或者增强人体性能的外骨骼仍缺乏实际应用。开发一种可用于实际应用的便携式下肢外骨骼仍需要解决许多技术挑战。例如,气动人工肌肉驱动器驱动的外骨骼由于动力源的原因而缺乏便携性,由于空气的压缩性而导致对位置和力的控制精度不高。因此,并不适用于日常康复训练。此外,在穿戴者进行康复训练的过程中,驱动器产生所需要的制动扭矩是不节能的。
技术实现要素:
5.本技术提供的一种步行辅助外骨骼装置,能够解决现有技术中的外骨骼系统的重量较大,使用时额外负担大,会增加穿戴者的代谢消耗,且对位置和力的控制精度不高,并不适用于日常康复训练,相应驱动器产生所需要的制动扭矩不节能的问题。
6.为解决上述技术问题,本技术采用的一个技术方案是:提供一种步行辅助外骨骼装置,其中,该步行辅助外骨骼装置包括:髋关节组件,用于穿戴在用户的髋关节部;第一连接杆,第一连接杆的一端连接于髋关节组件;膝关节组件,包括第一壳体,齿环、直齿以及拉簧,第一壳体连接于第一连接杆的另一端,用于穿戴在用户的膝关节部,齿环连接于第一壳体,直齿齿合于齿环的内环,拉簧的相对两端分别连接于齿环和直齿,且拉簧的延伸方向经过齿环的圆心;其中,第一壳体在带动齿环向第一方向转动时,齿环带动直齿向第一方向转动,直齿带动拉簧沿其延伸方向拉伸运动,而在拉簧回弹复位时,拉簧带动直齿向与第一方向相对的第二方向转动,直齿带动齿环向第二方向转动,齿环带动第一壳体向第二方向转动;第二连接杆,第二连接杆的一端连接于第一壳体;小腿组件,与第二连接杆的另一端连接,小腿组件用于穿戴在用户的小腿部。
7.其中,齿环的内径为直齿外径的两倍,拉簧在初始状态时,与直齿的连接点为齿环的圆心位置处,拉簧的延伸方向垂直于连接点与直齿圆心的连线。
8.其中,膝关节组件还包括第一连接件和第二连接件,第一连接件连接于齿环的一侧面上,第二连接件对应第二连接件连接于直齿的一侧面上靠近其外环顶点的位置处,拉簧的相对两端分别连接于第一连接件和第二连接件。
9.其中,第一壳体包括连杆固定件和第一连杆夹板,连杆固定件连接于第一壳体,第一连杆夹板连接于连杆固定件,并与连杆固定件相互配合,以固定连接第一连接杆。
10.其中,第一壳体还包括旋转固定壳、旋转外壳和滑动件,旋转固定壳连接于连杆固定件,旋转固定壳面向旋转外壳的一侧面上形成有滑轨,旋转外壳连接于齿环,滑动件的一端连接于旋转外壳,滑动件的另一端滑动连接于滑轨。
11.其中,第一壳体还包括第二连杆夹板,第二连杆夹板连接于旋转外壳,并与旋转外壳相互配合,以固定连接第二连接杆。
12.其中,髋关节组件包括第二壳体、凸轮以及弹性件,第二壳体的连接于第一连接杆的一端,用于穿戴在用户的髋关节部,凸轮连接于外壳和连接杆远离膝关节组件的另一端,弹性件包括呈设定角度设置的第一支脚和第二支脚,第一支脚连接于外壳,第二支脚抵接于凸轮的第一侧面;其中,第一连接杆在驱动凸轮向第一方向旋转时,凸轮带动第二支脚沿第一侧面的部分弧面远离第一支脚运动,而在第二支脚靠近第一支脚回弹复位时,第二支脚带动凸轮相对第一支脚向第二方向旋转,凸轮带动第一连接杆向第二方向旋转。
13.其中,弹性件为扭转弹簧机构,弹性件还包括滚轮,第二支脚包括第一支杆和第二支杆,第一支杆的一端连接于第一支脚,第一支杆的另一端垂直连接于第二支杆,滚轮套设于第二支杆,并抵接于第一侧面。
14.其中,第一侧面的部分弧面在凸轮的第二侧面上的投影满足设定曲线函数关系;其中,第二侧面垂直第一侧面。
15.其中,髋关节组件还包括传动件,传动件的一端连接于第一连接杆,凸轮的第二侧面形成有第一通孔,传动件的另一端穿设于第一通孔,传动件由第一连接杆或凸轮带动转动,以辅助连接杆带动凸轮旋转,或辅助凸轮带动连接杆旋转。
16.其中,传动件的部分结构凸出于第一通孔形成凸起部,凸起部抵接于外壳;其中,凸起部的径向尺寸大于第一通孔的径向尺寸。
17.其中,髋关节组件还包括卡簧,传动件面向第一通孔的孔壁的侧面形成有卡簧槽,卡簧套设于卡簧槽,以限制传动件沿第一通孔的中轴线方向运动。
18.其中,第一通孔包括向靠近第一侧面凹设的凹陷部,传动件面向第一通孔的孔壁的侧面凸出形成有平键部,平键部嵌设于凹陷部,以限制传动件相对凸轮旋转运动。
19.其中,髋关节组件还包括连杆固定壳,连杆固定壳扣合在传动件远离第二壳体的一侧面上,第一连接杆的另一端连接在传动件和连杆固定壳之间,以由传动件和连杆固定壳相互配合固定。
20.其中,凸轮的第二侧面还形成有第二通孔,所述第二通孔为弯月状,且与所述第一通孔间隔设置。
21.其中,设定角度为85
°‑
95
°
,第一支脚相对第二支脚运行时的夹角变化范围为85
°‑
135
°
。
22.本技术的有益效果是:区别于现有技术,本技术提供的步行辅助外骨骼装置包括:髋关节组件、第一连接杆、膝关节组件、第二连接杆及髋关节组件,膝关节组件又包括第一壳体,齿环、直齿及拉簧,且髋关节组件、第一壳体及小腿组件分别用于穿戴在用户的髋关节部、膝关节部及小腿部;其中,齿环连接于第一壳体,直齿齿合于齿环的内环,拉簧的相对两端分别连接于齿环和直齿,且拉簧的延伸方向经过齿环的圆心,以在第一壳体带动齿环
向第一方向转动时,齿环能够带动直齿向第一方向转动,以通过直齿带动拉簧沿其延伸方向拉伸运动,而弹性蓄能,从而能够在在拉簧回弹复位时,由拉簧带动直齿向与第一方向相对的第二方向转动,直齿带动齿环向第二方向转动,齿环带动第一壳体向第二方向转动,从而能够避免使用额外的动力装置提供助力,而直接在人体行走的过程中的负工阶段进行蓄能,并反馈给人体,以达到辅助人体行走的目的。由此可知,通过穿戴该步行辅助外骨骼装置可以帮助行走功能障碍患者,比如,膝盖受损患者恢复自然步态,提高行走能力,实现运动功能康复,增强独立生活质量;且与现有的步态辅助设备相比,该步行辅助外骨骼装置能够自然获取人体行走能量,进而能够通过外骨骼装置反馈给人体进行助力行走,以减少人体行走负担;且因无需额外的动力装置,相应的重量也较轻,穿戴简单,人机协同性强,能够与人体步态相协调。
附图说明
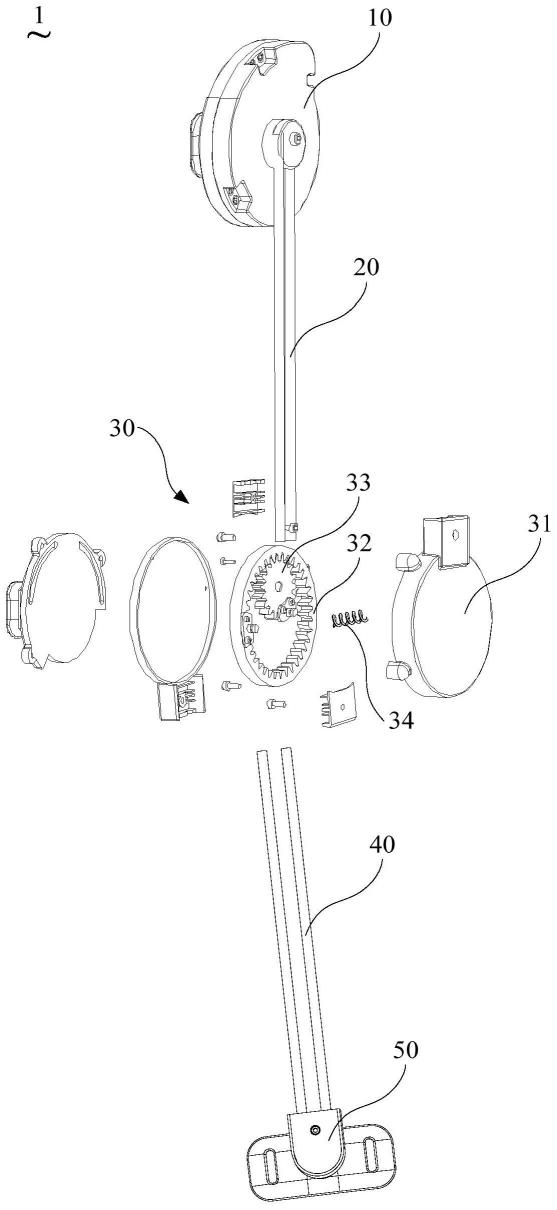
23.图1是本技术步行辅助外骨骼装置一实施例的爆炸结构示意图;
24.图2是图1中膝关节组件中的第一壳体的爆炸结构示意图;
25.图3是简化的2d行走模型的示意图;
26.图4是人体下肢-外骨骼系统模型示意图;
27.图5是图2中第一壳体中的旋转固定壳的一详细结构示意图;
28.图6是图1中膝关节组件中的齿环、直齿、第一连接件以及第二连接件的一详细结构示意图;
29.图7是万向齿轮机构的结构示意图;
30.图8是倒置万向齿轮机构的结构示意图;
31.图9是图1中步行辅助外骨骼装置中的髋关节组件的爆炸结构示意图;
32.图10是图9中髋关节组件中的弹性件一详细结构示意图;
33.图11是图9中髋关节组件中的凸轮的一详细结构示意图;
34.图12是绳绕凸轮系统的示意图;
35.图13是凸轮轮廓拟合曲线的示意图;
36.图14是图9中髋关节组件中的传动件一详细结构示意图;
37.图15是膝关节角度随步态周期的变化示意图;
38.图16是膝关节角速度随步态周期的变化示意图;
39.图17是左腿膝关节角度随步态周期的变化。
具体实施方式
40.发明人经长期研究发现,行走是人类日常生活的基本需求,行走功能障碍严重影响个人生活质量。在我们的日常生活中,有太多的因素会导致行走功能障碍,并且在大多数人的一生中都会经历某种形式的行走功能障碍。随着我国人口老龄化的加剧,行动能力的丧失所造成的严重社会问题和经济问题不可小觑。因此迫切需要开发可行的助行解决方案,以辅助并提高患者的行动能力,从而改善生活质量。可穿戴步态辅助设备是解决这一日益严重问题的有效方式。
41.在过去的几十年里,随着技术的进步,研究人员发现了新型的步态辅助设备,以重
现患者的日常活动能力。其中,膝踝足矫形器knee ankle foot orthosis(kafo)已经被广泛采用来治疗下肢骨折、关节炎、关节手术后的患者以及异常步态的矫正治疗。kafo用于提供膝关节和踝关节的稳定性,同时通过地面反作用力间接影响髋关节的稳定性。由于限制膝关节和踝关节的运动,穿戴者的步态产生不自然的动作,比如抬高臀部进行补偿,被动的增加了穿戴者的代谢成本。与正常步态相比,穿戴kafo时步态通常有代谢成本高,行走速度慢,长时间穿戴舒适度低等缺点。此外,患者在康复治疗的过程中往往需要物理治疗师的介入和帮助。
42.近年来,随着机械电子与控制技术的快速发展,也进而带动了外骨骼康复机器人的研究。外骨骼不同于矫形器,不能替代使用者的腿部进行支撑,而是在行走时为使用者提供辅助和助力,通过长时间重复的相关运动训练,可代替治疗师的帮助,从而有效降低了康复成本。
43.根据外骨骼作用方式的不同,可以分为两大类:主动式外骨骼和被动式外骨骼。在主动式步态辅助外骨骼中,驱动器主要包括了电机(electricmotor)、串联弹性驱动器(series elastic actuator,sea)、气动人工肌肉pam(pneumaticartificialmuscles)和磁流变驱动器(regenerative magnetorheological actuator)。驱动方式包括了电机驱动、液压驱动、气压驱动、人工肌肉驱动等,其中以电机作为驱动方式的主动式外骨骼为主。电机驱动相对灵活,可以配合减速器、离合器、连杆机构等进行关节的传动。
44.比如,现有一种由旋转式串联弹性驱动器(sea)驱动的膝关节外骨骼,用于步态辅助。旋转式sea由一个直流电动机,一个蜗轮蜗杆组,一个正齿轮组和一个扭转弹簧组成。在不考虑齿轮效率的情况下,它能够产生大约10.86nm的连续峰值扭矩。一种膝关节外骨骼,用于步态辅助,且具体由一个大腿连杆和小腿连杆组成,通过气动人工肌肉(pam)驱动,pam包括了屈肌和伸肌。一种膝关节外骨骼,用于膝关节功能障碍患者的步态康复,且具体是采用可再生磁流变驱动器(regenerative magnetorheological actuator)驱动,具有良好的可控性和高能量效率。
45.hal下肢康复外骨骼机器人,已实现产品化,其主要是由无线lan(local area network,局域网)系统、电动驱动系统、传感系统、执行机构等组成,机器人包括了下肢双侧以及腰部电源模块,质量为23千克,下肢15千克,共26个自由度。
46.而rewalk下肢外骨骼机器人包括了两侧下肢以及背包,背包内集成了电源模块和控制系统。rewalk可以帮助下肢瘫痪患者站立,行走,转弯和上下楼梯。
47.下肢康复外骨骼机器人作为一种智能仿生辅助康复设备,已经逐渐向商业化的方向发展。实验结果已经证实,外骨骼可以帮助行走功能障碍患者进行康复治疗,并且为身体健全的人在正常行走,负重行走甚至跑步时提高人体的运动能力。
48.然而,目前市场上代表性的外骨骼系统,如上述hal、rewalk,多采用刚性连接驱动设计。虽然能够实现快速准确的位置以及角度控制,但是重量较大,使用时额外负担大,会增加穿戴者的代谢消耗,同时,刚性机构会对关节的运动自由度造成一定的限制,限制使用时长和行走效率。
49.而用于康复或者增强人体性能的膝关节外骨骼仍缺乏实际应用,开发一种可用于实际应用的便携式膝关节外骨骼仍需要解决许多技术挑战。例如,气动人工肌肉驱动器驱动的膝关节外骨骼由于动力源的原因而缺乏便携性,由于空气的压缩性而导致位置和力控
制精度不高。因此,并不适用于日常康复训练。此外,主动式外骨骼通常重量大,这会给穿戴者造成不适,并增加穿戴者的代谢成本。
50.膝关节作为下肢关节的重要一环,是一个比较大的负重关节,起着“承上启下”的效果。对于膝关节损伤患者的康复治疗,不能仅限于对膝关节单一关节的辅助,外骨骼要从整个下肢运动的角度,对患者的步态进行考量,从而达到康复效果。
51.因此,通过下肢生物力学分析,基于还具备一定行动能力的行走功能障碍患者,急需设计一款简单,便携,与人体协调的被动式步态康复器,使其拥有减少关节运动约束、重量轻、方便快速穿戴等特点。
52.为了能够有效减少人体行走的负担,且重量轻,穿戴简单,人机协同性强,能够与人体步态相协调,本技术提供了一种步行辅助外骨骼装置。下面结合附图和实施例,对本技术作进一步的详细描述。特别指出的是,以下实施例仅用于说明本技术,但不对本技术的范围进行限定。同样的,以下实施例仅为本技术的部分实施例而非全部实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
53.在本技术中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
54.请参阅图1-图2,其中,图1是本技术步行辅助外骨骼装置一实施例的爆炸结构示意图,图2是图1中膝关节组件中的第一壳体的爆炸结构示意图。在本实施例中,步行辅助外骨骼装置1包括:髋关节组件10、第一连接杆20、膝关节组件30、第二连接杆40及小腿组件50。
55.其中,本技术中提供的一种步行辅助外骨骼装置1具体可用于对人体的行走进行辅助,比如,通过穿戴该步行辅助外骨骼装置1帮助行走功能障碍患者恢复自然步态,提高其行走能力,实现运动功能康复,以增强其独立生活质量。且具体实用于还具备一定行动能力的偏瘫患者,腿脚虚弱走路困难的高龄人群,意外伤害导致的步行不便者,或者是需要长时间徒步,登山等运动爱好者。当然,在其它实施例中,该步行辅助外骨骼装置1还可以用在智能机器人的关节上或其他任一合理的机械装置中,本实施例对此并不加以限制。
56.具体地,膝关节组件30进一步包括第一壳体31,髋关节组件10用于穿戴在用户的髋关节部,而第一连接杆20的相对两端分别连接于髋关节组件10和第一壳体31,且第一壳体31用于穿戴在用户的膝关节部,而第二连接杆40的相对两端分别连接于第一壳体31和小腿组件50,且小腿组件50用于穿戴在用户的小腿部。
57.由此可知,通过将髋关节组件10、第一壳体31及小腿组件50分别穿戴在用户的髋关节部、膝关节部及小腿部,并通过第一连接杆20和第二连接杆40进行相邻组件之间的连接和力的传递,能够有效的对用户的行走进行助力。
58.进一步地,膝关节组件30还包括齿环32、直齿33以及拉簧34,该齿环32具体连接于第一壳体31,而直齿33由齿环32的内环上面向圆心的轮齿处齿合于齿环32。而拉簧34的相对两端分别连接于齿环32和直齿33的特定位置处,且具体可以使拉簧34的延伸方向经过齿环32的圆心。
59.其中,在第一壳体31带动齿环32向第一方向转动时,比如,当用户穿戴步行辅助外骨骼装置1的行走过程中,吸收踝关节拓屈,也即把脚伸直,脚尖远离躯体时小腿摆动的能量时,小腿组件50将带动第二连接杆40向第一方向传动,进而通过第二连接杆40带动第一壳体31向第一方向转动,于是第一壳体31将带动齿环32向第一方向转动,进而使直齿33在齿环32和直齿33的轮齿之间的作用下向第一方向转动。但此时,直齿33将带动拉簧34沿其延伸方向拉伸运动,也即沿齿环32的某一内径做直线运动进行蓄能,故而在拉簧34失力后,也即用户准备抬脚时,拉簧34又将回弹复位而释放能量,进而带动直齿33向与第一方向相对的第二方向转动,直齿33带动齿环32向第二方向转动,齿环32又带动第一壳体31向第二方向转动,进而反馈给第二连接杆40,以补偿小腿组件50背伸,也即勾脚,脚尖靠近躯体时进行摆动所需的用力。
60.可理解的是,该第一方向具体可对应于相应人体的小腿部向当前行走方向的反方向摆动时第二连接杆40的转动方向,而第二方向对应于人体的小腿部向当前的行走方向摆动时第二连接杆40的转动方向,也即该膝关节组件30能够在用户小腿支撑地面,而身体前倾时,进行蓄能,并在小腿向行走方向摆动时,也即在小腿摆动态时,释放能量,而向前推出在小腿向前摆动时进行助力补偿,以避免因小腿摆动不足而造成的跌倒出现。
61.因此,该步行辅助外骨骼装置1具体可穿戴至相应人体其中一侧的下肢上,或分别穿戴至该人体两侧的下肢上,以能够在该人体的行走过程中,使步行辅助外骨骼装置1在该人体向行走方向的相反方向摆动时进行蓄能,而向前行走时,释放能量,为人体的下肢提供一提拉力和向前摆动的力,以辅助人体行走。
62.需说明的是,上述拉簧34具体是拉伸弹簧,也叫拉力弹簧具体是是承受轴向拉力的螺旋弹簧,拉伸弹簧一般都用圆截面材料制造,在不承受负荷时,拉伸弹簧的圈与圈之间一般都是并紧的没有间隙。而在其他实施例中,该拉簧34还可以是其他具有轴向拉力的弹性材料件的一种,本技术对此不做限定。
63.需说明的是,如图3所示,图3是简化的2d行走模型的示意图。该2d行走模型具体可对应于一无膝关节二维被动机器人模型,且该机器人没有驱动和控制系统,机构简单,只有髋关节一个自由度,以模拟人体实际行走的场景。由此可知,在适当调整机器人的初始条件,比如,初始关节角度(图3中的摆动角度)和初始关节角速度来匹配机器人的被动动力学和环境参数(斜坡角度),便可保证该机器人稳定的走下具有一定坡度的斜坡。在这种纯被动行走过程中,每个步态周期都类似于一个倒立摆的摆动过程,连续行走由多个倒立摆摆动周期衔接而成。行走中的能量消耗主要是由两个相邻步态周期之间的衔接过渡过程中脚与地面,也即图3中支撑腿与地面之间的冲击产生,而能量的补充则完全由重力,也即位于地面上空的摆动腿向行走方向摆动时的重力提供。通过对该机器人的实验,便可对应分析被动行走的稳定性问题和能量问题,以得到机器人的机构参数对行走性能的影响。
64.则可理解的,步行辅助外骨骼装置1具体可穿戴至相应人体其中一侧的下肢上,或分别穿戴至该人体两侧的下肢上,以能够在该人体的行走过程中,使步行辅助外骨骼装置1在该人体向行走方向的相反方向摆动时进行蓄能,而向前行走时,释放能量,为人体的下肢提供一提拉力和向前摆动的力,以辅助人体行走。
65.进一步地,请参阅图4,图4是人体下肢-外骨骼系统模型示意图。其中,该外骨骼由一个单自由度髋关节外骨骼,一个单自由度膝关节外骨骼和小腿固定件组成,在步态时分
别对大腿和小腿进行重力补偿。
66.在该模型中,下肢被简化为代表大腿和小腿的两连杆机构,脚近似为小腿末端的一个质点m3,把通过髋关节o1的一面s定义为零势能面,可得到此系统下人体下肢-外骨骼的重力势能为:
67.eg=e
gt
+e
gs
+e
gf
;
68.其中,e
gt
、e
gs
、e
gf
分别代表了大腿的重力势能,小腿的重力势能和脚的重力势能。
[0069][0070][0071]egf
=-m3g[l2cos(θ
2-θ1)+l1cosθ1];
[0072]
其中,mi,i=1,2,3分别表示人体i
th
的质量,m
aj
,j=1,2分别表示人体下肢-外骨骼系统中外骨骼j
th
的质量,lj代表了j
th
连杆的长度,l
j*
和sj分别代表了人体下肢和外骨骼的质量中心到关节的距离,θ1,θ2分别表示髋关节和膝关节的旋转角度。
[0073]
基于上述原理支持,本技术的步行辅助外骨骼装置1通过在第一壳体31带动齿环32向第一方向转动时,齿环32能够带动直齿33向第一方向转动,以通过直齿33带动拉簧34沿其延伸方向拉伸运动,而弹性蓄能,从而能够在拉簧34回弹复位时,由拉簧34带动直齿33向与第一方向相对的第二方向转动,直齿33带动齿环32向第二方向转动,齿环32带动第一壳体31向第二方向转动,从而能够避免使用额外的动力装置提供助力,而直接在人体行走的过程中的负工阶段进行蓄能,并反馈给人体,以达到辅助人体行走的目的。由此可知,通过穿戴该步行辅助外骨骼装置1可以帮助行走功能障碍患者,比如,膝盖受损患者恢复自然步态,提高行走能力,实现运动功能康复,增强独立生活质量;且与现有的步态辅助设备相比,该步行辅助外骨骼装置1能够自然获取人体行走能量,进而能够通过外骨骼装置反馈给人体进行助力行走,以减少人体行走负担;且因无需额外的动力装置,相应的重量也较轻,穿戴简单,人机协同性强,能够与人体步态相协调。
[0074]
在一实施例中,第一壳体31进一步包括连杆固定件311和第一连杆夹板312,而该连杆固定件311连接于第一壳体31,第一连杆夹板312连接于连杆固定件311,以能够与连杆固定件311相互配合,而使第一壳体31固定连接第一连接杆20,从而能够被第一连接杆20带动而同向旋转,或带动第一连接杆20同向旋转。
[0075]
请结合参阅图5,图5是图2中第一壳体中的旋转固定壳的一详细结构示意图。
[0076]
在一实施例中,第一壳体31还包括旋转固定壳313、旋转外壳314和滑动件315,而旋转固定壳313连接于连杆固定件311,且旋转固定壳313面向旋转外壳314的一侧面上形成有滑轨3131,旋转外壳314连接于齿环32,滑动件315的一端连接于旋转外壳314,而其另一端滑动连接于滑轨3131。
[0077]
可理解的是,旋转外壳314能够带动滑动件315相对旋转固定壳313沿滑轨3131的延伸方向进行旋转运动,而当滑轨3131的长度有限时,将进而限制旋转外壳314相对旋转固定壳313旋转的角度。
[0078]
进一步地,因旋转固定壳313连接于连杆固定件311,而旋转固定壳313连接于连杆固定件311,也即滑轨3131的长度设置又将进一步对膝关节组件30的旋转角度进行限位,以能够在小腿得到充分摆动的同时不会对膝关节组件30中的拉簧34进行压缩,而阻碍小腿的
充分摆出。
[0079]
可选地,该滑轨3131具体可以使形成于旋转固定壳313面向旋转外壳314的一侧面上的凹陷部,而滑动件315为一螺杆,且该螺杆的一端嵌设于该凹陷部,并能够沿该凹陷部的延伸方向来回移动。而在其他实施例中,该滑轨3131还可以是凸出于旋转固定壳313面向旋转外壳314的一侧面上的具有设定长度的曲线导轨,而滑动件315为一端对应于该曲线导轨的设置的连杆,且能够沿该曲线导轨的延伸方向来回移动,而其另一端固定连接于旋转外壳314,本技术对此不做限定。
[0080]
在一实施例中,第一壳体31还包括第二连接杆夹板316,而第二连接杆夹板316连接于旋转外壳314,并与旋转外壳314相互配合,而使第一壳体31固定连接第二连接杆40,从而能够被第二连接杆40带动同向旋转,或带动第二连接杆40同向旋转。
[0081]
请结合参阅图6,图6是图1中膝关节组件中的齿环、直齿、第一连接件以及第二连接件的一详细结构示意图。
[0082]
在一实施例中,齿环32的内径具体为直齿33外径的两倍,而相应地,二者的半径也满足该倍数关系,如图6所示的r1具体为r2的两倍,且拉簧34在初始状态时,与直齿33的连接点为齿环32的圆心位置处,而拉簧34的延伸方向垂直于连接点与直齿33圆心的连线。
[0083]
需说明的是,如图7和图8所示,其中,图7是万向齿轮机构的结构示意图,图8是倒置万向齿轮机构的结构示意图。该齿环32和直齿33的设计思路参考了一种用于承载单自由度旋转载荷的新型重力平衡结构。
[0084]
众所周知,万向齿轮机构可以通过齿轮副将旋转运动转化为直线运动。且该万向齿轮机构具体由一个sun gear(中心齿轮),一个arm(机械臂)和一个ringgear(环形齿轮)组成。当sun gear的直径为ring gear直径的一半时,sun gear上的点a会沿图7所示的虚线pq进行直线运动。
[0085]
由此可知,该直线运动的特性促使我们应用万向齿轮机构来设计如图8所示的倒置万向齿轮机构。而为了对应重力平衡器中载荷的旋转运动,选择齿轮臂作为机架,ring gear作为载荷的输入臂,构成了倒万向齿轮机构。a点的初始位置与参考坐标系的原点o点重合。因此,当载荷输入臂旋转θ角度时,环形齿轮ringgear也将以θ角度旋转,沿pq线移动的a点产生以下位移关系:
[0086]
s(θ)=2rsin(θ);
[0087]
其中,s是点a相对于原点o的位移,r是sun gear的半径。
[0088]
因此,如果在点q与点a或点p与点a之间设置一个拉伸弹簧,使弹簧的伸长量等于点a直线运动的长度(即s),则弹簧的弹性势能ek为:
[0089][0090]
在一实施例中,膝关节组件30还包括第一连接件35和第二连接件36,且第一连接件35连接于齿环32的一侧面上,第二连接件36对应第二连接件36连接于直齿33的一侧面上靠近其外环顶点的位置处,拉簧34的相对两端分别连接于第一连接件35和第二连接件36,以通过第一连接件35和第二连接件36分别连接至齿环32和直齿33上。
[0091]
请结合参阅图9,图9是图1中步行辅助外骨骼装置中的髋关节组件的爆炸结构示意图。在本实施例中,髋关节组件10进一步包括第二壳体11、凸轮13以及弹性件12。
[0092]
具体地,该第二壳体11用于穿戴在用户的髋关节,而凸轮13连接于第二壳体11和第一连接杆20远离膝关节组件30的另一端。
[0093]
弹性件12具体包括第一支脚121和第二支脚122,该第一支脚121在初始状态时与该第二支脚122呈设定角度设置,且该第一支脚121与该第二支脚122之间的夹角能够在受相应外力的作用时,逐渐变大,并在该外力消失时,回弹复位。
[0094]
具体地,该第一支脚121连接于第二壳体11,而第二支脚122抵接于凸轮13的第一侧面131,以在第一连接杆20驱动凸轮13相对第一支脚121向第一方向旋转,比如,穿戴有步行辅助外骨骼装置1的人体在带动该步行辅助外骨骼装置1向其步行方向的相反方向摆动时,膝关节组件30能够通过第一连接杆20驱动髋关节组件10的凸轮13相对第一支脚121向第一方向旋转,而使第二支脚122沿凸轮13的第一侧面131的部分弧面远离第一支脚121运动,也即,第二支脚122与第一支脚121之间的夹角在外力的作用下逐渐变大,以进行蓄能。
[0095]
而当该人体带动步行辅助外骨骼装置1向其步行方向摆动时,也即向前行走时,驱使凸轮13相对第一支脚121向第一方向旋转的外力便会消失,而此时髋关节组件10的弹性件12将回弹复位,也即第二支脚122与第一支脚121之间的夹角将恢复初始状态,第二支脚122将靠近第一支脚121运动复位,以带动凸轮13相对第一支脚121向与第一方向相对的第二方向旋转,而凸轮13又将带动第一连接杆20向第二方向旋转,从而给人体向当前的行走方向进行的运动提供助力,比如,为该人体提供一向上提升的力以及向前摆动的力。
[0096]
其中,凸轮13的第一侧面131与其第二侧面132垂直,而第一连接杆20的延伸方向平行于该第二侧面132。且该第一侧面131具体指的是凸轮33的外周面,也即一个环状的曲面。
[0097]
请继续结合参阅图10-图11,其中,图10是图9中髋关节组件中的弹性件一详细结构示意图,图11是图9中髋关节组件中的凸轮的一详细结构示意图。
[0098]
在一实施例中,弹性件12具体为扭转弹簧机构,且弹性件12还包括有滚轮123,而第二支脚122包括第一支杆1221和第二支杆1222,第一支杆1221的一端连接于第一支脚121,第一支杆1221的另一端垂直连接于第二支杆1222,而滚轮123套设于第二支杆1222,并抵接于第一侧面131。
[0099]
需说明的是,该扭转弹簧机构是一种一端固定而另一端作用有扭矩的装置。且在扭矩的作用下,该扭转弹簧机构会发生扭转变形,其变形角的大小与扭矩有一定的关系。最简单的,比如扭簧,该扭簧在扭矩的作用下,相应的弹簧材料会产生弯曲弹性变形,而使弹簧在平面内产生扭矩。该扭簧常用于储能,传递扭矩和压紧。
[0100]
可选地,该滚轮123为圆柱体或椭圆柱体或球体等任一合理的方便滑动的形状样式,且该滚轮123的中部位置形成有呈圆柱体设置的通孔。
[0101]
在一实施例中,凸轮13的第一侧面131的部分弧面在其第二侧面132上的投影具体还满足一设定曲线函数关系;其中,该第二侧面132垂直第一侧面131。
[0102]
需说明的是,如图12所示,图12是绳绕凸轮系统的示意图。其中,以使用一种基于凸轮13,也即图中的凸轮a的绳绕弹簧系统为例,该系统具体是通过线性弹簧,凸轮13和绕在凸轮13上并连接弹簧的无弹性线实现模拟扭转弹簧装置的效果。当凸轮13旋转时,绕在凸轮13上的无弹性线会拉动弹簧从而产生扭矩,通过设计不同的凸轮13轮廓等可以得到不同的扭矩变形角对应关系,也即,f(u
t
)与α的对应关系。
[0103]
相反的,我们也可以通过离散个点满足力矩-角度关系(f(u
t
)与α的对应关系)来进行凸轮13的轮廓的设计,也即图6中凸轮a绕设有无弹性线的部分弧段的样式设计。在这种情况下,对离散力矩点进行曲线拟合是很有必要的。下面将基于异型滚珠扭转弹簧样品的各项参数,对离散力矩点的理论值大小进行求解。
[0104]
设定扭转弹簧机构工作扭转角度(工作载荷下极限扭转)扭转弹簧机构的自由角度(无载荷时两引脚间的夹角)为90
°
。根据髋关节外骨骼给定的结构空间考虑,我们给定扭转弹簧机构直径d=2mm,扭转弹簧机构圈数n=6。扭转弹簧机构材料选择碳素弹簧钢丝c级。查表得:
[0105]
抗拉极限强度σb=1710mpa;
[0106]
许用弯曲应力σ
bp
=0.8σb=0.8*1710=1368mpa;
[0107]
考虑结构紧凑,暂定旋转比c=6;
[0108]
曲度系数
[0109]
扭转弹簧机构直径d=c*d=6*2=12mm;
[0110]
扭转弹簧机构刚度其中,e为弹性模量,也即扭转弹簧机构的制成材料的抗弹性变形的一个量,材料刚度的一个指标;
[0111]
工作极限扭矩
[0112]
下面对离散力矩点进行拟合,离散力矩点如表1所示。
[0113]
工作角度力矩(n
·
mm)100
°
233.45110
°
466.9120
°
700.35
[0114]
具体地,如图13所示,图13是凸轮轮廓拟合曲线的示意图。通过论述力矩及力矩导数连续是凸轮13轮廓平滑的必要条件,三次曲线是最低幂次的满足该条件的拟合曲线,下面利用三次样条曲线来拟合力矩曲线。
[0115]
对n+1(n≥2)个离散的力矩点,表示为:
[0116]
g[α(i)]=gi,i=0,1,...,n;
[0117]
则可用曲线gi(α)拟合,其中gi(α)满足:
[0118]gi
(α
i-1
)=g
i-1
,gi(αi)=gi,i=1,2,...,n;
[0119]
该曲线gi(α)对应的凸轮13轮廓坐标可描述为:
[0120]
(x,y)=[xi(αi),y(αi)],i=1,2,...,n;
[0121]
该三次样条曲线满足以下条件:
[0122]
g(α)=gi(α)为三次多项式。
[0123]
g(α),导数g(α)’,二阶导数g(α)”,在区间内始终是连续的,即函数光滑。
[0124]
指定样条曲线的三次微分分配,即
[0125]
g”0
(α1)=g”1
(α1);
[0126]
g”n-2
(α
n-1
)=g”n-1
(α
n-1
)。
[0127]
则得到了n个三次多项式分段为:
[0128]gi
(α)=ai+bi(α-αi)+ci(α-αi)2+di(α-αi)3[0129]
其中,ai,bi,ci,di,i=1,2,...,n代表4n个未知系数。
[0130]
可理解的,在一具体的实施例中,凸轮13的第一侧面131的部分弧面在其第二侧面132上的投影具体还满足上述所例举如图13所示的曲线函数,且满足该曲线函数的部分弧面对应于人体行走过程中,第二支脚122沿凸轮13的第一侧面131进行来回滑动的那一部分弧面。
[0131]
可理解的是,髋关节组件10的设计基于异型滚珠扭转弹簧与凸轮13的协同作用,对大腿部分进行重力补偿,步态时在支撑态的后期,将内置扭转弹簧的扭矩转换成髋关节和膝关节的平衡扭矩,以克服重力的影响。膝关节外骨骼模块的设计参考了弹簧重力平衡装置的结构原理,用于承载单自由度旋转载荷。在步态中,吸收踝关节拓屈时小腿摆动的能量,在摆动态时释放。穿戴后,膝关节模块可以帮助小腿在摆动态时向前推出,以避免因小腿摆动不足而造成的跌倒。
[0132]
请继续结合参阅图14,图14是图9中髋关节组件中的传动件一详细结构示意图。
[0133]
在一实施例中,髋关节组件10还包括传动件14,该传动件14的一端连接于第一连接杆20,而凸轮13的第二侧面132形成有第一通孔1301,以使传动件14的另一端能够穿设于第一通孔1301而与凸轮13固定连接。
[0134]
由此可知,第一连接杆20具体是通过带动传动件14转动,进而通过传动件14带动凸轮13旋转,以使第二支脚122能够沿第一侧面131的部分弧面远离第一支脚121运动,而进行弹性蓄能。且在在第二支脚122靠近第一支脚121运动复位时,能够带动凸轮13相对第一支脚121向与第一方向相对的第二方向旋转,进而能够通过凸轮13带动传动件14转动,以通过传动件14带动第一连接杆20旋转。其中,第二侧面132垂直第一侧面131。
[0135]
在一实施例中,传动件14的部分结构凸出于第一通孔1301形成凸起部141,而凸起部141抵接于第二壳体11,且凸起部141的径向尺寸大于第一通孔1301的径向尺寸,以能够使凸轮13可靠地套设在传动件14上而不与第二壳体11直接接触,从而能够更顺利的被传动件14带动旋转。
[0136]
在一实施例中,髋关节组件10还包括卡簧15,且传动件14面向第一通孔1301的孔壁的侧面形成有卡簧槽3401,卡簧15套设于卡簧槽3401,以能够限制传动件14沿第一通孔1301的中轴线方向运动。
[0137]
进一步地,凸轮13的第一通孔1301还包括向靠近其第一侧面131凹设的凹陷部1303,且传动件14面向第一通孔1301的孔壁的侧面凸出形成有平键部142,而平键部142嵌设于凹陷部1303,以能够限制传动件14相对凸轮13旋转运动,也即使传动件14能够与凸轮13固定连接。
[0138]
可选地,凸轮13的第二侧面132还形成有第二通孔1302,而该第二通孔1302具体为弯月状,且与第一通孔1301间隔设置,以能够尽可能的保证凸轮13的重心在其几何中心附近或与其几何中心重合,并能够尽可能的减少凸轮13的重量,以减轻相应人体的穿戴负担。而在其他实施例中,该第二通孔1302而可以呈梯形或椭圆形等其他任一合理的形状样式,本技术对此不做限定。
[0139]
可选地,第一支脚121和第二支脚122之间在初始状态时的设定角度为85
°‑
95
°
,而
第一支脚121相对第二支脚122运行时的夹角变化范围为85
°‑
135
°
。
[0140]
在一实施例中,髋关节组件10还包括连杆固定壳16,连杆固定壳16扣合在传动件14远离第二壳体11的一侧面上,而第一连接杆20的另一端连接在传动件14和连杆固定壳16之间,以由传动件14和连杆固定壳16相互配合固定。
[0141]
在一具体的实施例中,髋关节组件10具体包括:第二壳体11、凸轮固定外壳件17、凸轮13、弹性件12、滚轮123、卡簧15、传动件14、连杆固定壳16、m3*8螺栓四个、m2.5*8螺栓一个、m4*16螺栓一个。膝关节组件30具体包括:旋转固定壳313、旋转外壳314、连杆固定件311、齿环32、直齿33、第一连接件35、第二连接件36、第一连杆夹板312、第二连接杆夹板316、m3*8螺栓三个、m2*8螺栓两个、m3*8螺栓一个、m2*6螺栓四个、m3*10螺栓一个。
[0142]
其中,各规格的螺栓具体用于髋关节组件10及膝关节组件30中各结构件之间的连接固定,在此不再赘述。
[0143]
进一步地,髋关节组件10在连杆固定壳16与传动件14之间固定了两个第一连接杆20,当人体步态时,第一连接杆20随大腿摆动,第一连接杆20会带动,传动件14旋转凸轮13通过轴肩与传动件14轴向固定,传动件14上留有卡簧槽1401,当凸轮13一侧与传动件14轴向接触后,另一侧通过卡簧15进行轴向固定。同时,传动件14上还形成有平键部142,使得传动件14能够与凸轮13进行周向旋转固定。
[0144]
其中,弹性件12,比如,扭转弹簧机构和凸轮13配合在步态中的运动原理具体是:当摆动侧的足底接触地面后扭转弹簧机构上的滚轮123与凸轮13接触,此时穿戴步行辅助外骨骼装置1一侧腿进入支撑态,大腿向运动方向的反方向摆动,第一连接杆20带动传动件14转动,此时凸轮13与滚轮123接触点的直径不断增加,滚轮123进而带动扭转弹簧机构的相应引脚扭转,扭转弹簧机构产生扭矩,进入支撑态末期,扭转弹簧机构产生最大工作扭矩。
[0145]
进入摆动态时,大腿向运动方向的同方向摆动,第一连接杆20带动传动件14转动,此时凸轮13与滚轮123接触点的直径不断减小,扭转弹簧机构在支撑态时储存的扭矩,随着步态进入摆动态释放,而释放的扭矩将带动凸轮13转动,并通过传动件14和连杆固定壳16带动第一连接杆20摆动,第一连接杆20与膝关节组件30连接,膝关节组件30的摆动随即带动相应人体的膝关节向行走方向摆出。
[0146]
可理解的,扭转弹簧机构凸轮13配合在紧凑、复杂的装配环境中可以节省空间,并且相对质量轻。髋关节组件10实现了吸收步态中膝关节做负功的能量,在摆动阶段为膝关节提供一个向前的提拉力。
[0147]
旋转外壳314与齿环32通过m2*8螺栓固定,同时,旋转外壳314与第二连接杆夹板316之间固定有第二连接杆40,第二连接杆40与小腿组件50连接。齿环32和直齿33配合,连杆固定件311上设计有直齿33的轴固定机架。
[0148]
其中,齿环32和直齿33上分别通过m2*6螺栓固定有第一连接件35和第二连接件36,第二连接件36和第一连接件35各自固定了拉簧34的两端。则当小腿向运动方向的反向摆动时,小腿组件50带动第二连接杆40转动,第二连接杆40带动旋转外壳314转动,旋转外壳314带动齿环32转动,齿环32带动直齿33转动,齿轮副的转动则使得第二连接件36和第一连接件35上固定的拉簧34被拉伸。以上描述实现了膝关节外骨骼原理介绍中的万向齿轮机构的运动原理,将齿轮副的旋转运动转化为了拉簧34的直线运动。当步态进入下一阶段时,
即背伸发生后,外骨骼穿戴一侧的小腿向运动方向的同向运动时,拉簧34从拉伸状态中解除,释放能量辅助齿环32和直齿33运动,即膝关节外骨骼旋转,带动第二连接杆40摆动,第二连接杆40通过小腿组件50与小腿连接,即带动小腿摆动。其他方面,第一连杆夹板312上与连杆固定件311通过25-m3*10螺栓固定了碳纤维杆,与髋关节外骨骼连接,传递髋关节外骨骼对膝关节的做功。
[0149]
同时,膝关节旋转部件组,也即直齿33、齿环32及拉簧34,被旋转固定壳313和连杆固定件311固定,旋转固定壳313与连杆固定件311通过m3*8螺栓固定,旋转固定壳313与旋转外壳314接触一侧设计有滑轨3131,m2*8螺栓上端在旋转固定壳313与旋转外壳314接触时内嵌于滑轨3131中,使得旋转部件组可以在旋转固定壳313和连杆固定件311的固定中可以充分滑动,同时通过滑轨3131对膝关节外骨骼的旋转进行限位。限位的原因是在小腿得到充分摆动的同时不会对旋转部件中的拉簧34进行压缩,阻碍小腿的充分摆出。
[0150]
在步态中,膝关节外骨骼吸收了踝关节拓屈时小腿摆动产生的能量,并在摆动态时释放,最直观的感受是可以弥补因小腿摆动不足而导致的摔倒。
[0151]
外骨骼各组件之间使用第一连接杆20和第二连接杆40连接,可以替换不同长度的碳纤维杆,以匹配不同佩戴者下肢的长度参数。
[0152]
该步行辅助外骨骼装置1穿戴时,在踝关节上方设置有小腿组件50来配合膝关节外骨骼做功,同时传递步态时小腿摆动产生的能量给外骨骼。
[0153]
上述方案,当人体腿部进行负荷时,人体的耗氧量会显著增加,现有的步态辅助设备都在向着轻量化的方向发展,而本技术中的步行辅助外骨骼装置1的适用对象为还具备一定行动能力的偏瘫患者,腿脚虚弱走路困难的高龄人群,意外伤害导致的步行不便者,或者是需要长时间徒步,登山等运动爱好者。针对此类人群,该步行辅助外骨骼装置1能够有效与人体步态向协调,且比矫形器穿戴更加舒适,同时兼顾了便携与轻量化。
[0154]
在步行辅助外骨骼装置1样机制作完成后,在健康受试者左腿佩戴外骨骼进行了三维运动捕捉实验。获取了人体步态数据和足底压力数据,对数据进行了运动学和动力学分析,实验过程如下:
[0155]
受试者需要重复完成三次实验,以确保至少一组的可选数据。实验结合本技术所述的外骨骼作用原理,每次步态时使右腿先进入测力板采集步态数据,观察左腿进入摆动态后膝关节运动学参数的变化。
[0156]
本实验的目的是比较同一步态数据下穿戴外骨骼时左右膝关节的运动学参数变化,以及比较穿戴外骨骼时与不穿戴外骨骼时左膝关节的运动学参数变化。
[0157]
如图15所示,图15是膝关节角度随步态周期的变化示意图,为穿戴外骨骼时左右膝关节角度随步态周期的变化情况。可以看出,穿戴外骨骼对于膝关节摆动的峰值角度没有太大影响,但是在步态周期的摆动阶段(gaitcycle-l,步态周期0%—50%),穿戴外骨骼一侧的膝关节角度接近零度,说明摆动更加充分,从膝关节角度的振幅看,穿戴外骨骼一侧比另一侧增加了接近十度,可以分析出,当穿戴外骨骼时,对于受试者的膝关节加速度和角加速度都有增加。
[0158]
如图16所示,图16是膝关节角速度随步态周期的变化示意图为穿戴外骨骼时膝关节角速度随步态周期的变化情况。可以看出,在步态支撑态阶段,穿戴外骨骼一侧的膝关节角速度有接近百分之二十五的提升。
[0159]
如图17所示,图17是左腿膝关节角度随步态周期的变化,为左腿膝关节角度的参数变化。蓝线为受试者穿戴外骨骼时膝关节角度的变化情况,黄线为受试者正常步态时的膝关节角度变化情况。可以看出,在摆动态时(gaitcycle-l 0%-50%)穿戴外骨骼的情况下膝关节角度比不穿戴外骨骼的情况下低了大约十度,这表明在穿戴外骨骼后下肢摆动的更加充分。同时摆动速度和摆动加速度的也有明显的提高。
[0160]
且通过在产品样机制作完成后进行三维运动捕捉实验,获取了受试者的步态数据和足底压力数据,对数据进行了运动学和动力学分析。实验数据证明,步行辅助外骨骼装置1在辅助步态方面具有改善效果。主观穿戴感受为在步态时可以在膝关节处提供一个向前的提拉效果。
[0161]
本技术的有益效果是:区别于现有技术,本技术提供的髋关节组件、第一连接杆、膝关节组件、第二连接杆及髋关节组件,膝关节组件又包括第一壳体,齿环、直齿及拉簧,且髋关节组件、第一壳体及小腿组件分别用于穿戴在用户的髋关节部、膝关节部及小腿部;其中,齿环连接于第一壳体,直齿齿合于齿环的内环,拉簧的相对两端分别连接于齿环和直齿,且拉簧的延伸方向经过齿环的圆心,以在第一壳体带动齿环向第一方向转动时,齿环能够带动直齿向第一方向转动,以通过直齿带动拉簧沿其延伸方向拉伸运动,而弹性蓄能,从而能够在在拉簧回弹复位时,由拉簧带动直齿向与第一方向相对的第二方向转动,直齿带动齿环向第二方向转动,齿环带动第一壳体向第二方向转动,从而能够避免使用额外的动力装置提供助力,而直接在人体行走的过程中的负工阶段进行蓄能,并反馈给人体,以达到辅助人体行走的目的。由此可知,通过穿戴该步行辅助外骨骼装置可以帮助行走功能障碍患者,比如,膝盖受损患者恢复自然步态,提高行走能力,实现运动功能康复,增强独立生活质量;且与现有的步态辅助设备相比,该步行辅助外骨骼装置能够自然获取人体行走能量,进而能够通过外骨骼装置反馈给人体进行助力行走,以减少人体行走负担;且因无需额外的动力装置,相应的重量也较轻,穿戴简单,人机协同性强,能够与人体步态相协调。
[0162]
以上仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1